基于正余弦旋转变压器的襟缝翼角位移传感器信号处理技术研究
2023-08-16 23:51韩建辉张军红杜永良
航空科学技术 2023年3期
韩建辉 张军红 杜永良
摘 要:大型飞机襟缝翼角位移传感器的交流信号在经过长距离传输后产生电压幅值升高的现象,导致角度测量超差的问题。本文提出了采用正余弦传感器利用信号解调技术解决该问题的方法,论述了正余弦传感器和AD2S1210解调芯片的解调原理,设计了正余弦传感器的监控方法、AD2S1210的外围接口电路及FPGA的配置和时序控制方法。该设计方案已应用于某大型飞机的襟缝翼控制器计算机,良好的试验测试结果证明了该方法可以解决传感器交流信号长距离传输带来的测量超差问题。该研究可以应用于大型飞机的角度及线位移测量领域,对于提升大型飞机传感器的测量精度具有重要意义。同时,针对AD2S1210解调芯片供应链的不稳定性设计了国产化的旋转变压器传感器的激励电路原理,正弦、余弦输入信号的解调及监控方法原理作为备用方案。
关键词:正余弦旋转变压器; AD2S1210; 传感器信号处理; 传感器监控
中图分类号:V249.11 文献标识码:A DOI:10.19452/j.issn1007-5453.2023.03.012
某大型飞机在进行飞控高升力控制分系统地面调试和验证时发现,经过计量标定的差动变压器式角位移传感器(RVDT)存在明显的测量超差。经理论分析认为,是因为襟翼、缝翼角位移传感器安装在翼尖附近,距离安装于机头电子设备柜的襟缝翼控制计算机较远(约为30m),传输线缆存在的分布电容效应,通过多组不同长度线缆的信号传输试验确认,30m传输线缆会导致信号幅值平均升高1.715%。且随着线缆长度提高到30m,幅值升高也会增大,导致解调后的角度超差也增大。
由于线缆为柔性体,从机头电子设备舱到机翼翼尖的长距离敷设很难保证每个架次线缆走线的一致性,这会导致各个架次的分布电容不一致,进而导致角度超差幅度也不一致。
传统解决问题的方式为采用襟翼、缝翼角位移传感器机上计量标定的方法消除分布电容带来的误差。由于分布电容不一致就会导致每架次的标定参数不一致,因此每架机都需要重新进行机上标定。传统的解决方式可以解决长距离传输带来的测量超差问题,但是会使地勤人员的维护难度和成本提高很多,进而降低飞机的出勤率。
本文提出了采用正余弦旋转变压器式角位移传感器进行襟翼、缝翼角度测量的方法,利用信号处理技术解决线缆长距离传输带来的测量超差问题,同时可以保证每架机的襟翼、缝翼角位移传感器计量标定参数保持一致,减小地勤维护工作,提高飞机的出勤率。
1 正余弦旋转变压器的特点及工作原理
正余弦旋转变压器式传感器是一种精密的角位移测量装置,具有灵敏度高、抗干扰能力强等特点[1-2],特别适用于严寒、潮湿、高温、高速、振动等恶劣环境下工作,广泛用于伺服控制系统和汽车、机器人等领域。满足飞机对机载设备严苛的环境适应性和高精度测量要求。
正余弦旋转变压器式角位移传感器通常配置初级绕组位于转子上,两个次级绕组位于定子之上[3],原理如图1所示,初级绕组施加激励Vr,当转子绕组的轴角为θ时,正弦次级绕组S1-S3输出Vb;余弦次级绕组S2-S4输出Va。其中sin(ωt)为激励信号频率,KE为转子激励幅度。通过对Va、Vb的解调处理解算出偏角θ。
2 基于AD2S1210的襟缝翼旋转变压器角位移传感器信号处理方法
2.1 AD2S1210的功能原理
由安捷伦公司发布的AD2S1210转换器芯片是专用的正余弦旋转变压器激励和信号解调芯片[4]。AD2S1210是一款10、12、14、16位分辨率可调的旋变数字转换器,集成片上可编程正弦波振荡器,为传感器提供正弦波激励。转换器正余弦电压输入范围为3.15Vp-p±0.8505,频率范围为2~20kHz,工作温度范围可达-40~125℃。利用TYPEⅡ型跟踪环进行角位移信号解调计算,故障诊断模块可以实现故障检测定位。功能组成如图2所示。
正余弦旋转变压器与AD2S1210芯片转换器的连接关系如图3所示,AD2S1210芯片转换器完成激励输入和正余弦输出信号的解调,AD2S1210芯片转换器的逻辑时序控制及配置由微控制器或者FPGA实现。
2.2 信号解调处理及监控方法
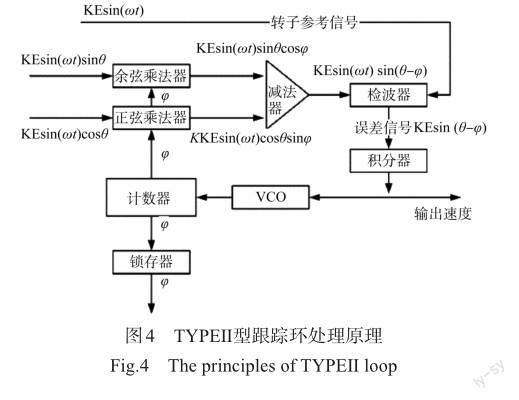
减法器将信号处理完成后送入检波器,检波器同时接收高频激励信号作为参考信号。检波器信号解调原理是将减法处理后信号和参考信号相乘,由于参考信号频率远远高于θ、ψ的变化频率,再利用低通滤波器将高频参考信号过滤掉便可得到跟踪角度的误差信号KEsin(θ-φ)。解调之后,将解调后的信号反馈至积分器,积分器的作用是输出激励信号对振荡器(VCO)进行激励,而振蕩器的正常工作又使得计数器开始计数,计数器使ψi+1=ψi±1LSB(最低有效位),最终使θ-ψ趋近于0,此时由于线缆长距离传输的分布电容效应导致的KE电压升高误差影响即可忽略,最后将角度值输出至锁存器进行输出。其中振荡器和计数器起到补偿滤波器的作用。原理如图4所示。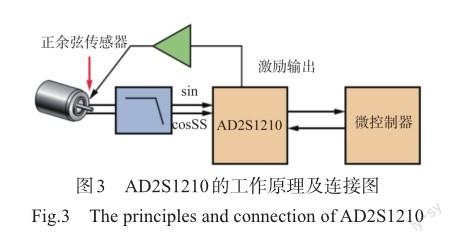
AD2S1210的TYPEⅡ跟踪环在信号解调处理后输出sinψ、cosψ至信号监控模块,由于跟踪值ψ趋近于传感器测量偏角θ,且由于正余弦输入传输线缆一致,因此正弦幅值等于余弦幅值,去掉载波信号sin(ωt),所以得出
KEsinθsinφ+KEcosθcosφ=KE(2)
因此,可通过监控式(2)的数值是否为固定值来判断正余弦传感器是否故障。由于长距离线缆传输时分布电容的因素导致正弦输入余弦输入会出现一定电压升高,所以高升力控制分系统的监控门限的设定应适度放宽,以减少故障误报带来的虚警问题。信号监控模块同时可以完成输入信号丢失检测(LOS)和信号降级检测(DOS),当ψ跟踪θ误差过大时,TYPEⅡ跟踪环会上报信号跟踪丢失故障。
2.3 接口电路和解调芯片配置及时序控制设计
2.3.1 旋转变压器及解调芯片接口电路设计
AD2S1210芯片集成于高升力控制分系统的襟缝翼控制计算机的接口处理板上,该芯片的外围接口电路包括供电、晶振时钟、襟缝翼旋转变压器角位移传感器激励及正余弦解调接口电路、芯片配置及时序控制逻辑电路等。
其中供电电路包括芯片的5V数字电路供电,5V芯片模拟电路供电,采用8.193MHz的晶振作为时钟基准。AD2S1210芯片向襟缝翼旋转变压器角位移传感器激励驱动供电,激励驱动电路采用缓冲电路实现幅值调节[6-7]。正弦信号和余弦信号采用双绞屏蔽线输入AD2S1210芯片。接口支持電路如图5所示。
2.3.2 解调芯片的配置及时序控制设计
襟缝翼正余弦旋转变压器角位移传感器的激磁采用7VAC 1800Hz,晶振时钟8.192MHz[8],因此AD2S1210解调输出角度的分辨率为16位二进制。
襟缝翼控制计算机(FSECU)的接口处理板采用FPGA对AD2S1210芯片进行配置寄存器的读写和时序控制。配置寄存器包括信号丢失检测、信号降级检测、跟踪丢失检测的上下门限设置及软件复位设置[9]。时序控制包括初始化时的配置写入、初始化时的配置读取校验和襟缝翼角度读取等。由于受篇幅所限,仅介绍襟缝翼角度和故障读取时序控制,如图6所示,SAMPLE管脚低电平控制芯片开始采样,CS管脚低电平选中使能芯片,RD管脚低电平使能并行总线读取,A0、A1管脚低电平使能襟缝翼角度读取,襟缝翼控制计算机通过对应的时序实现襟翼、缝翼角度的采样读取。
襟缝翼控制计算机的接口处理板中的FPGA完成襟缝翼角度采样和故障信息读取后,结果放入存储缓冲区中,DSP读取角度数据及故障监控信息完成周期任务处理后,通过VME背板总线发送至核心处理器板,作为高升力控制分系统的应用层软件的控制输入。其原理设计如图7所示。
3 试验测试结果
地面仿真测试平台通过接口适配连接襟缝翼控制计算机(FSECU),以实现襟缝翼收放控制指令的输入和计算机反馈的结果的处理与显示。襟缝翼控制计算机通过A429总线向襟翼和缝翼电机驱动器发送襟缝翼收放指令,电机驱动器转化为电机正转和反转控制指令,电机驱动连杆转动再驱动丝杠转动,从而实现襟缝翼的收放,旋转变压器角位移传感器通过测量连杆的转角转化为襟缝翼角度,襟缝翼控制计算机利用接收到的襟缝翼角度实现闭环控制。地面试验测试原理如图8所示。

基于正余弦旋转变压器的襟缝翼角位移传感器,从信号处理的角度解决了传统的RVDT型角位移需要每架机都进行计量标定的维护性问题,使每架机的襟缝翼角位移传感器标定参数保持一致,直接配置到高升力控制分系统的应用软件即可。
襟缝翼收放角度的时域实测值如图9所示。旋转变压器襟翼、缝翼角位移传感器静态点测量结果见表1和表2,通过襟缝翼控制计算机发送指定的襟翼、缝翼偏角指令,通过与地面基准测试传感器的比对,结果表明静态点误差小于1%,精度较高。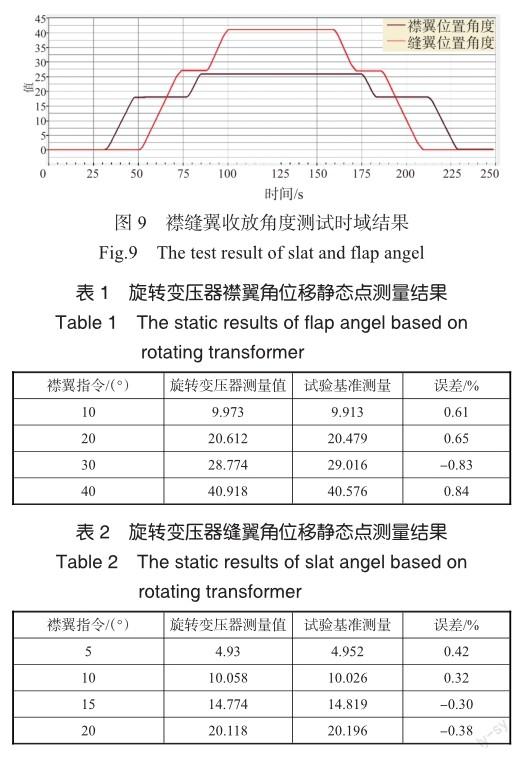
4 国产化的襟缝翼旋转变压器角位移传感器信号解调技术设计
经过多场景验证的成熟芯片AD2S1210进行襟缝翼旋转变压器角位移传感器信号的解调处理,可以提高高升力控制分系统的成熟度和可靠性,但考虑到国外芯片供应链的不确定性,因此应考虑设计国产化的襟缝翼旋转变压器角位移传感器信号的解调处理方法。
4.1 激励驱动信号的生成
通过多级滤波将高频正弦信号滤除即可得到频率为2kHz的正弦波信号。
建立如图11所示的仿真电路,方波模拟电路生成方波信号,串接隔离放大电路,在经过两级一阶滤波即可得到正弦激励信号。仿真结果如图12所示。由仿真结果可得激励信号生成的可行性。



4.2 正弦、余弦信号的解调原理
由于正弦波激励信号是由FPGA生成的方波信号转换产生的,因此在进行正弦、余弦信号处理时,由FPGA控制AD器件在T/4时进行精准采样,以保证sin(ωt)=1。原理如图13所示。AD采样后的正弦输入为K1sinθ,余弦输入为K1cosθ。依据θ角的象限变化,采用表3的方法即可计算得出襟缝翼的角位移。
4.3 旋转变压器传感器的监控原理
由于正弦输入和余弦输入信号在进行长距离传输时会出于分布电容的原因导致幅值升高,因此平方和的门限应在地面铁鸟试验台和机上进行充分的调试测试,以确定合适的上下监控门限,时间门限通常选择襟缝翼控制计算机的帧周期的5~8倍。
4.4 国产化的激励解调方法和AD2S1210的激励解调方法的对比分析
相比于AD2S1210,国产化的激励解调方法电子分立器件较多,功耗较高,也没有经过充分的地面和控制试飞验证。尽管其在成熟度、集成度、可靠性和监控的全面性方面不占优势,但是在激励解调和监控方法通过分立器件组成的电路和软件实现上,原理明确,在进行设计迭代优化时成本低、周期短。可以作为AD2S1210在供應链不稳定时的备份。
5 结束语
针对某大型飞机高升力控制分系统的襟缝翼角位移传感器长距离传输导致的地勤维修性增加的问题,本文提出了正余弦旋转变压器角位移传感器对襟翼、缝翼角度进行测量,并设计了集成于襟缝翼控制计算机的AD2S1210芯片进行信号解调的方案,解决了该维修性问题。通过了某型飞机的地面试验和空中试飞的验证,用户反映较好。考虑到AD2S1210芯片的供应链可能存在不稳定性的问题,设计了国产化的正余弦旋转变压角位移传感器的激励、解调和监控原理算法,以备不时之需。
参考文献
[1]李明,安书董,段宇博.一种基于AD2S1210 的旋转变压器位置解码及监控方法[J].信息技术与信息化,2021(4):139-140. Li Ming, An Shudong, Duan Yubo. Position decoding and mon‐itoring method of rotating transformer[J]. Information Technol‐ogy and Informatization, 2021(4):139-140.(in Chinese)
[2]何敏. 旋转变压器的角度误差校正系统设计[J].机电工程,2016(9):1140-1143. He Min. Design of angle error correction system for resolver[J]. Journai of Mechanical & Electrical Engineering,2016(9):1140- 1143.(in Chinese)
[3]饶大伟,彭科容,杨雷.基于旋转变压器换向的无刷伺服驱动控制研究[J].电子技术,2017(7):28-31. Rao Dawei, Peng Kerong, Yang Lei. Research on brushless servo drive control based on rotating transformer[J]. Electronic Technology, 2017(7):28-31.(in Chinese)
[4]索晓杰,马小博,周勇.正余弦旋转变压器与线性旋转变压器的对比分析[J].信息通信,2019(2):14-16. Suo Xiaojie, Ma Xiaobo, Zhou Yong. Comparative analysis of sine-cosine rotating transformer and linear rotating transformer[J].Information & Communications, 2019(2):14-16.(in Chinese)
[5]崔业兵,许敬,李裕.电动伺服旋转变压器的激磁放大电路研究[J].现代电子技术,2016(24):167-171. Cui Yebing, Xu Jing, Li Yu. Research on exciting amplification circuit of rotary transformer for electric servo system[J]. Modern Electronics Technique, 2016(24):167-171.(in Chinese)
[6]刘娜,陈倩,于收海.线性旋转变压器结构对输出电压线性度的影响[J].微电机,2013(7):20-23. Liu Na, Chen Qian, Yu Shouhai. Impacting of output voltage in different structure of rotary transformer[J]. Micromotors, 2013(7):20-23.(in Chinese)
[7]尤磊,吴敬玉,王勇,等.航天用反作用飞轮旋转变压器位置检测算法[J].导航与控制,2020(6):59-64. You Lei, Wu Jingyu, Wang Yong, et al. Position detection algorithm of resolver in reaction flywheel[J]. Navigation and Control, 2020(6):59-64.(in Chinese)
[8]张蓓蓓.面向多传感器综合探测的信息融合试飞方法[J] .航空科学技术,2021,32(9):31-35. Zhang Beibei. Information fusion flight test method for multisensor integrated detection[J]. Aeronautical Science & Technol‐ogy, 2021,32(9):31-35.(in Chinese)
[9]張炯,牛欢,陈雪.基于多传感器融合的无人机应急着陆功能研究[J]. 航空科学技术,2022,33(11):11-20. Zhang Jiong, Niu Huan, Chen Xue. Research on emergency landing function of uav based on multi-sensor fusion[J]. Aero‐nautical Science & Technology,2022,33(11):11-20.(in Chinese)
Research of Signal Processing Technology of Flap and Slat Angle Transducer Based on Sine and Cosine Rotating Transformer
Han Jianhui, Zhang Junhong, Du Yongliang
AVIC The First Aircraft Institutes, Xian 710089, China
Abstract: The AC signal of the large airplane flap angular displacement sensor increases the voltage amplitude after long-distance transmission, which causes the problem of angle measurement error. In this paper, a method to solve this problem by using sine-cosine sensor and signal demodulation technology is presented. The demodulation principle of rotating transformer and AD2S1210 demodulation chip is discussed. The monitoring method of rotating transformer, the peripheral interface circuit of AD2S1210, and the configuration and timing control method of the GA are designed. The design scheme has been applied to a large airplanes flap controller computer. Good test results show that the method can solve the measurement overrun caused by long distance transmission of sensor AC signals. This research can be applied to the angle and line displacement measurement of large aircraft, and it is important to improve the measurement accuracy of sensor of large aircraft. At the same time, the excitation circuit principle of the domestic rotator sensor is designed for the instability of the supply chain of AD2S1210 demodulation chip. The demodulation and monitoring method principle of sine and cosine input signals are used as the alternative scheme.
Key Words: sine andcosine rotating transformer; AD2S1210; sensor sigal demodulation; sensor monitoring