自主式水下无人潜航器导航系统的应用与展望
2023-08-12 06:37魏宗康李海兵
导航与控制 2023年3期
李 鹏, 魏宗康, 李海兵
(1. 北京航天控制仪器研究所, 北京 100039; 2. 崂山国家实验室, 青岛 266237)
0 引言
水下潜航器是人类认识海洋、开发海洋的重要工具。 其中, 自主式水下无人潜航器(Autonomous Underwater Vehicle, AUV)在保障人身安全的同时, 凭借其性能灵活机动、隐蔽性好、潜水深度大等特点成为水下探测的重要平台。
水下导航系统作为AUV 的关键系统, 不仅可以有效地保障AUV 的行进安全和回收安全, 也是获取相关探测信息的基准, 对执行水下任务的成功具有重要意义。 由于水下环境复杂多变, GPS 等电磁信号在水中的传播能力有限, 因此惯性导航和水声定位仍是水下导航的主要方式。 为了能够满足深远海、长航时的海洋探测和环境监测等任务的需求, 降低惯性导航系统的累计误差, 一些新型导航技术得到逐步发展和应用, 这也是推动水下导航系统向前发展的必要因素。 本文首先论述了AUV 导航系统的国内外应用现状, 其次梳理了新型水下导航技术的优缺点, 最后研判了AUV导航系统的未来发展趋势。
1 AUV 导航系统应用现状
1.1 国外AUV 导航系统应用现状
美国在AUV 方面一直处于领先地位, 是全球拥有水下潜航器研究机构最多的国家。 REMUS 最早由美国Woods Hole 海洋研究所于1995 年研制,后经Hydroid 公司升级优化, 现已形成作业深度范围达100m ~6000m 的各型AUV。 REMUS 100[1]的导航系统由声学定位系统(Acoustic Positioning System, APS)、航位推算系统(Dead Reckoning System,DRS)和GPS 构成。 其中, APS 包括长基线(Long Baseline, LBL) 和 超 短 基 线(Ultra Short Baseline,USBL), LBL 至少采用2 个应答器进行定位, 而USBL 采用1 个应答器进行定位; DRS 由声学多普勒流速剖面仪(Acoustic Doppler Current Profiler,ADCP)、罗盘/速率陀螺构成, 利用惯性导航仪可以将航位推算精度提高至5m/h。 Hydroid 公司于2020 年被美国UII 公司收购, 并于2021 年4 月推出了最新款小型AUV——REMUS300, 其导航系统包含了iXblue Phins C3 惯性导航系统、LBL、多普勒辅助航位推算及GPS(军用可选), 其航向精度可达0.1°, 姿态精度为0.05°, DVL 辅助情况下的定位精度为0.04%D。 iXblue Phins C3 惯性导航系统如图1 所示。
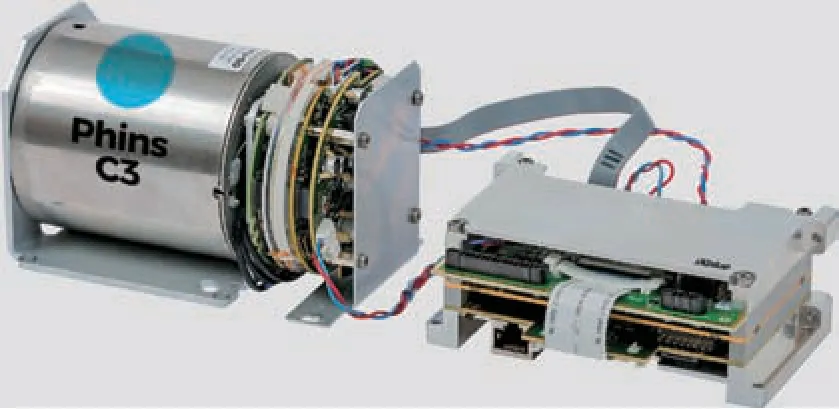
图1 iXblue Phins C3 型惯性导航系统Fig.1 Diagram of iXblue Phins C3 INS
美国蓝鳍金枪鱼(Bluefin) 机器人公司研制的BPAUV 是一种高性能的小型水下航行器, 其典型代表为因搜寻马航失联客机MH370 而广被人知的Bluefin-21[2], 其外观结构如图2 所示。 该型AUV是一种高度模块化的自主水下潜航器, 其导航系统由INS、DVL、SVS、GPS 和USBL 构成, 在潜水和定期上浮进行GPS 数据更新时, 能融合姿态方位参考系统(Attitude and Heading Reference System,AHRS)和DVL 的数据。 在美海军的演习中, Bluefin 对目标的定位精确在3m 半径以内, 实时定位精度优于0.1%D, USBL 可辅助其进一步提高航位推算精度。

图2 Bluefin-21 型AUVFig.2 Diagram of Bluefin-21 AUV
挪威HUGIN 系列AUV 包括HUGIN I、HUGIN II、HUGIN1000、HUGIN3000、HUGIN4500、HUGUN Superior 和HUGIN Endurance 等型号。 其中,HUGIN Endurance 为2021 年2 月Kongsberg 公司推出的一款专为深海环境作业而设计的新一代AUV[3]。 该型AUV 使用的导 航 系统为Kongsberg Sunstone 惯性导航系统, 该系统包括HISAS 微导航、地形匹配导航以及单应答器导航, 定位精度优于0.01%D。
德国阿特拉斯电子公司研制了多个系列的AUV[4-5], 包括 “海狐-IQ(SeaFox-IQ)” “海狼A(SeaWolf A)” “海獭(SeaOtter)”。 其中, SeaOtter系列包含SeaOtter Mkl、SeaOtter Mk2、SeaOtter Mk2D 等型号。 为满足水下执行任务期间的高精度导航需求, SeaOtter Mk2 的导航系统采用了MARPOS II 定位系统, 其导航精度在距离海底深度不超过200m 时可达到航程的0.03%D。 导航信息不仅利用先进的Kalman 滤波器进行处理, 导航系统内还嵌入了LBL 和USBL, 从而提高了大航程下的导航精度。
冰岛TeledyneGavia 公司研制的“GAVIA” 是一款完全模块化设计的精简型AUV, 既可在极浅水域又可在深水中执行任务。 其导航系统配有美国Kearfort 公司生产的INS、亚迪仪器公司生产的导航系统: 1200kHz DVL、GPS、MCP 以及LBL 或USBL 声学导航系统。 其中, INS 采用的是环形激光陀螺仪, 经组合后的INS/DVL/GPS 导航系统定位精度为3m/h[6-7]。
1.2 国内AUV 导航系统应用现状
国内AUV 的研制主要集中于科研院所和高校,中科院沈阳自动化所、中船710 所、哈尔滨工程大学、西北工业大学、天津大学、中国海洋大学均有成熟产品; 民营企业中, 如深之蓝海洋科技公司也推出了导航精度优异的AUV 产品。
2019 年, 由中科院沈阳自动化所、哈尔滨工程大学等多家单位联合研制的“潜龙三号” AUV在大西洋成功应用。 如图3 所示, “潜龙三号”AUV 搭载有USBL、INS、DVL 等导航设备, 当在近底作业时, 其采用了“惯导+多普勒声呐系统”组合导航模式, 同时融合了超短基线定位信息和深度信息, 经实测验证, 其定位精度优于0.3%D[8]。
由哈尔滨工程大学联合中科院研制的HSU001型AUV 于2019 年10 月1 日国庆节阅兵中公开亮相, 如图4 所示。 据悉该AUV 可装备多种载荷,与导航相关的设备包括: 多波束声呐、避碰声呐、多普勒速度计程仪、惯性导航组件等。 鉴于公开资料较少, 无法通过数据表明该型AUV 的导航精度。 但是, 该型AUV 在国庆阅兵中公开亮相, 表明该型AUV 已在部队中列装, 技术成熟、可靠,性能指标满足我国海军作战能力要求。
中船710 所推出了海神系列AUV, 最大作业深度达6000m, 其导航系统主要由INS 和DVL 组成。 西北工业大学研制的50kg 级AUV、中国海洋大学研制的“旗鱼” 系列AUV 以及天津大学研制的MI-AUV 所用的导航系统同样采用了以INS 为基础的组合导航系统。
“橙鲨” 系列是国内深之蓝海洋科技公司完全自主研发的中/小型AUV, 其导航系统采用“DVL+INS(光纤/激光) +GPS/BD” 组合方案, 最高导航精度优于0.5%D, 可依据应用场景进行不同精度等级定制。
1.3 AUV 导航系统应用小结
根据目前AUV 导航系统的实际应用现状, 可得到如下结论:
1)水下导航系统多是以INS、声学设备为主要导航方式。 其中, INS 以光纤陀螺和激光陀螺为主, MEMS 陀螺等低成本惯性仪表则应用较少。
2)面向深远海AUV 的水下导航系统已经应用,地形匹配导航也随之崭露头角。
3)GPS 及APS 等非自主定位方式由于作用范围有限, 需要结合实际的任务环境在特定条件或区域内使用。
4)国内AUV 导航系统在定位精度方面仍与国外存在一定差距。
因此, 面对AUV 向深远海方向的不断发展,GPS 及APS 等非自主式导航系统的局限性问题将更加突出。 惯性导航系统的精度需要仍需不断提升, 特别是MEMS 惯性导航系统的精度亟需提高,以满足未来小型深远海AUV 的低成本需求。
2 新型导航技术的水下应用情况及面临的问题
除上述INS、APS、DVL 等传统水下定位导航技术外, 人们为了突破GPS 的局限性, 开展了如地球物理场导航、视觉导航、仿生导航等新型导航技术的研究, 期望能够进一步丰富导航手段的多样性, 克服惯性导航的误差累计问题, 提高AUV 的综合导航精度。 特别是全源导航的提出更加强调了多样导航的必要性, 旨在全方位保证导航系统具有良好鲁棒性、容错性、连续性和高精度性能, 对未来导航的发展提出了新的指引。
2.1 地球物理场导航
地球物理场导航一般包括重力场导航、地形导航以及地磁导航。 三种导航方式都是通过各自物理场内的物理特征进行匹配定位[9-12], 物理特征则可以根据已知的地理信息或者通过AUV 携带的地球物理导航传感器测量得到。
目前, 只有美国、俄罗斯等极少数国家能够实现地球物理场匹配导航, 而且匹配精度方面鲜有文献报道。
重力场导航方面, 日本东京大学利用了Micro-G Lacoste 公司新式的重力仪L&RS-174, 用AUV较大范围测量的重力数据重复精度可达0.1mGal,重力场的空间分辨率可达75m。 美国早在1998 年和1999 年已将通用重力模块(UGM)与静电陀螺导航仪先后在“先锋号” 舰和战略弹道导弹核潜艇上进行了演示试验, 试验数据表明: 采用重力场匹配导航技术, 可将导航系统的经度误差和纬度误差降低至导航系统标称误差的10%, 该系统装备已安装在潜艇上[13]。 目前, 美国新一代的潜艇导航系统基本都包含重力传感器模块。
地形导航方面, 除上述HUGIN 系列AUV 具备水下地形匹配辅助导航技术外, 美国斯坦福大学与蒙特利湾水下研究所在Benthic Imaging AUV上进行了基于多波束声呐的水下地形匹配实验[14]。 如图5 所示, 通过他们设计的TRN 滤波器, 实验获得了5m ~10m 的定位精度; 与实际路线相比, 结合地形匹配的路线偏差约为35m,表明该系统具有可与声导引系统相媲美的在线返站能力。
地磁导航方面, 2003 年, 美国国防部宣称已实现水下导航精度优于500m(CEP)的纯地磁导航系统的研制[15]。 文献[16]使用低分辨率地图与高精度导航传感器、地磁传感器和深度传感器进行水下导航模拟试验, 试验结果表明: 整个试验的位置误差小于25m, 平均误差小于13m。 文献[17]中,日本大阪大学使用AUV 分别在海底缓坡和有着陡峭海底斜坡的骏河湾进行了地磁数据和水深数据匹配实验, 通过评估分析, 表明AUV 在水流中采用地磁图和水深图匹配方法获得的导航精度优于单独使用惯性导航系统或地磁辅助惯性导航系统获得的导航精度。
国内的地球物理场导航技术发展方兴未艾,但基本处于仿真阶段, 只进行了少量的水下试验。重力导航方面, 我国科技部已将“海洋大地测量基准与海洋导航新技术” 作为重点研发计划, 重点发展海洋重力匹配等地球物理场导航技术。 钱学森实验室的郑伟等[18]提出了通过GNSS-R 测高星座获得高空间分辨率和高精度全球海洋重力基准图的思路及技术路线, 该理论通过天海一体化水下惯性/重力组合导航系统, 可基于重力/测高卫星和海洋观测多源数据, 并根据实时精确测量的重力信息进行高精度辅助导航, 使水下航行器的水下自主导航能力大幅提高, 延长了其上浮校正周期。 航天十三所开展了多个航次海洋重力仪的重力测量试验, 积累了大量试验数据, 为重力匹配导航的应用提供了重要参考和保障。 地形导航方面, 哈尔滨工程大学[19]提出了一种单波束协同地形匹配导航方法来改善北极冰下的定位性能。国内学者在基于粒子滤波和质点滤波地形匹配算法的基础上开展了大量工作, 以改善地形匹配误差问题[20-24]。 地磁导航方面, 国防科技大学在2011 年进行了惯性/地磁匹配水下导航实验, 验证了惯性/地磁匹配组合导航技术的可行性。 文献[25]提出了一种地磁匹配区自组织优化分类方法, 仿真实验结果表明, 该方法在地磁导航适配区选取方面具有较高的分类精度和可靠性。 文献[26]提出了一种基于DDQNQ 强化地磁导航算法预测航向角, 在缺少两地间地磁数据库的情况下,该算法可使AUV 随着两地往返次数增多减少地磁搜索步数, 仿真验证了该算法的有效性。
虽然地球物理场导航自主性好, 对长航时、深远海导航具有天然优势, 但是也存在一定的不足:
1)导航中需要先验场图用于匹配, 但是在多数水域需要先获取地球物理场信息数据库, 且准确获取存在一定难度。 比如地形特征获取需要AUV与海底距离保持在一定范围内, 否则会影响场图的匹配精度。
月修中应重点关注回火器滤网的清洗、安装情况,对滤网片不好安装的,要对底盘进行攻丝,以免松脱造成防爆片爆炸;要利用月中更换系统的机会清洗回火器,且根据各烧嘴压力情况适时更换干净的回火器;水冷套管变形较多时,应排查、更换回火器;确认炉区各烧嘴处是否有冷铜,若冷铜距烧嘴较近,宜先用大火烧融,确认后再停炉吹风冷却;做好漏风、漏水等管道密封工作;后期要将各烧嘴冷却水一律开至最大,更换使用状况不良的蝶阀和不带钢丝的软管。
2)除地形特征较为明显稳定外, 其他物理场信息辨识较为困难, 如地磁场易受干扰, 重力场变化缓慢, 辨识度不高。 此外, 重力仪或重力梯度仪的体积和功耗较大, 多搭载于水面舰船使用,难以用于中小型AUV。
3)地球物理场类导航技术尚不成熟, 且该信息较为敏感, 多涉及军事领域, 因此外界很难获知。
虽然地球物理场导航需要地形、地磁场等先验地图, 但是结合计算机技术, 形成了多个交叉领域内的新型导航技术, 如即时定位与构图(Simultaneous Localization and Mapping, SLAM) 导航、视觉导航和仿生导航。 其中, SLAM 导航和视觉导航都是基于构建地图技术的导航方法, 而仿生导航则研究生物如何利用地球物理场信息进行导航,该导航技术仍处于理论研究、试验阶段。
2.2 SLAM 导航
SLAM 导航实际是在未知环境中载体在运动过程中根据位置和地图进行自身定位, 同时在自身定位的基础上建造增量式地图, 从而实现自主定位和导航。 当前, 在无人机导航、汽车自动驾驶方面研究较多, 比如基于激光的SLAM 导航系统,但是水下SLAM 的导航研究相对较少。 不论SLAM应用于哪种环境, 其性能主要取决于SLAM 算法的有效性。 目前, 应用于AUV 上的SLAM 方法大致可分为基于贝叶斯法则和马尔可夫假设的概率SLAM(包括基于扩展卡尔曼滤波器的SLAM 和基于粒子滤波器的SLAM)和基于提取图形特征信息的SLAM 方法(如视觉SLAM)。
国外的研究机构主要集中在美国、英国、澳大利亚、西班牙等国家。 2021 年, 美国科研人员Willners 等[27]提出了一种基于自主重定位的水下SLAM 框架, 该框架在运行过程中保持单一的一致性地图, 并在SLAM 失去特征跟踪时更新当前的计划。 通过AUV 水下试验, 表明该方法具有一定的优越性。
国内的研究单位较少, 主要分布在哈尔滨工程大学、中科院沈阳自动化研究所、天津大学等。2019 年, 天津大学采用人工磁信标作为路标, 为SLAM 导航系统的状态更新提供观测信息, 通过试验验证表明了磁信标辅助方式在水下SLAM 研究中的有效性[28]。
目前, SLAM 仍在面对的主要问题是: 由于水下环境复杂, 需要进行大量的特征提取, 如何快速准确地将特征数据与已知图形进行正确关联,将直接影响导航系统的鲁棒性、实时性及精确性。
2.3 视觉导航
视觉导航是指通过摄像机或其他视觉传感器对周围环境进行图像采集, 并对图像进行滤波和计算, 完成自身位置确定和路径识别, 并做出导航决策的一种导航技术。 随着计算机视觉技术的快速更迭, 视觉导航具有以下优势: 1)自主性强,隐蔽性好; 2)能够提供丰富的环境在线信息; 3)抗干扰能力强, 适合感知动态环境; 4)成本低、敏感度高, 随目标距离越近, 精度越高。 因此, 视觉导航特别适合战场侦察和环境监测、AUV 回收引导以及空间交会对接。
纯视觉导航可分为视觉里程计和可视即时定位与构图(VSLAM)。 视觉里程计固连于载体上, 当载体运动时, 相对于载体的静态物体在视觉传感器中呈现的相对位置是连续变化的, 以此图像信息可以获得视觉传感器在此运动过程中的位置和姿态变化, 然后对位置和姿态变化量进行积分即可得到视觉传感器的运行轨迹。

图6 VSLAM 原理图Fig.6 Schematic diagram of VSLAM
基于惯性/视觉的组合导航可以达到一定的互补效果, 视觉导航可以修正惯性导航系统的累计误差, 惯性导航可以弥补视觉导航实时性不足的问题。 目前, 视觉/惯性导航在沉船勘察、水下航行器对接等领域应用效果明显。
但是水下环境复杂多变, 如何在清晰度复杂变化、图像色彩不均的情况下利用视觉传感器从低质图像中实时获取有效信息, 则是亟待解决的问题。 因此, 基于滤波、深度学习等算法技术的研究备受关注。 2011 年, Shkurti 等[29]针对水下运载体在姿态估计中引入了扩展卡尔曼滤波, 重点对特征检测、描述和匹配以及从结构到运动的视觉定位算法进行了研究。 Chen 等[30]则提出了一种基于深度学习的卡尔曼滤波算法DynaNet, 说明了使用深度学习重构传统卡尔曼滤波模型能有效提升深度学习框架求解位姿问题的能力。 Zhan 等[31]提出了一种基于几何方法和深度学习的单目视觉里程计算法, 该算法成功地将深度学习与对极几何和PnP 结合在一起, 且不会受到尺度漂移问题的影响。 仉新等[32]采用了一种融合深度学习的VSLAM 方法, 该方法提升了移动机器人定位和建图的准确性和鲁棒性。 在基于稀疏视觉SLAM 的ORB-SLAM2 系统基础上, Vargas 等[33]利用声学里程计将DVL、陀螺仪和高度计或深度传感器融合,得到六自由度机器人位姿的漂移估计, 两艘AUV的实验结果表明: 进行多传感器融合后的VSLAM系统在受控、非受控和现场环境中的鲁棒性都得到了加强。
2.4 仿生导航
经研究发现, 动物可通过感知周围环境的变化, 利用偏振光、地磁场、距离以及经验知识等信息进行导航。 仿生导航传感器就是参照动物的这种导航机制, 从自然环境中获取相关特征信息进行导航定位。 仿生导航是一种涉及仿生学、计算机与视觉技术、信息融合学等多学科交叉领域的自主性新型导航技术, 已然成为导航领域研究的前沿和热点。
2018 年4 月, 美国与澳大利亚的学者仿照螳螂虾的眼睛研制了一种可采集偏振光信息的仿生相机, 并首次实现水下环境中基于偏振光的导航功能, 经试验验证其每1km 的定位误差为6m, 为长距离水下导航开辟了新的可能性[34-35]。
在国内, 仿生导航的研究还处于实验室阶段。张晨等[36]提出了一种基于最小磁角的抗干扰仿生导航算法, 通过磁角的大小来评价导航路径的优劣, 从而避免了潜航器陷入地磁异常区域。 李红[37]研究了不依赖先验数据库的地磁仿生导航方法, 针对地磁参量异常、洋流干扰等造成搜索空间错位下的局部环路搜索问题, 提出了基于模糊决策的趋向性地磁参量搜索导航算法, 通过实验验证了算法的可行性和有效性。 田连标[38]研究了波浪水下偏振光的分布模式, 建立了偏振传输理论模型, 并验证了正确性, 从而为水下仿生偏振光导航的应用提供了理论基础。
虽然仿生导航已经取得了一定的进展, 但是距离水下应用还需要解决3 个方面的技术问题:
1)水下生物的导航机制尚未被研究清楚, 例如超过1000m 深海中的光线是极其微弱的, 那么处于深海中的生物依靠何种信息、将信息进行何种处理来实现导航需要进行深入研究;
2)仿生导航传感器无论在体积上还是性能上与动物器官差距较大, 需要进一步优化设计, 提高传感器制造工艺水平;
3)水下仿生导航信息的提取及处理算法还处于起步阶段, 设计自适应能力强、健壮性好的算法是一个首先要面对的现实问题。
2.5 协同导航
水下协同导航主要是通过水声通信技术共享导航传感器的信息, 一方面可以抑制误差、提高导航定位精度, 另一方面可以开展更复杂的分布式任务。 协同导航可以分为主从式导航方式和并行式导航方式, 如图7、图8 所示。
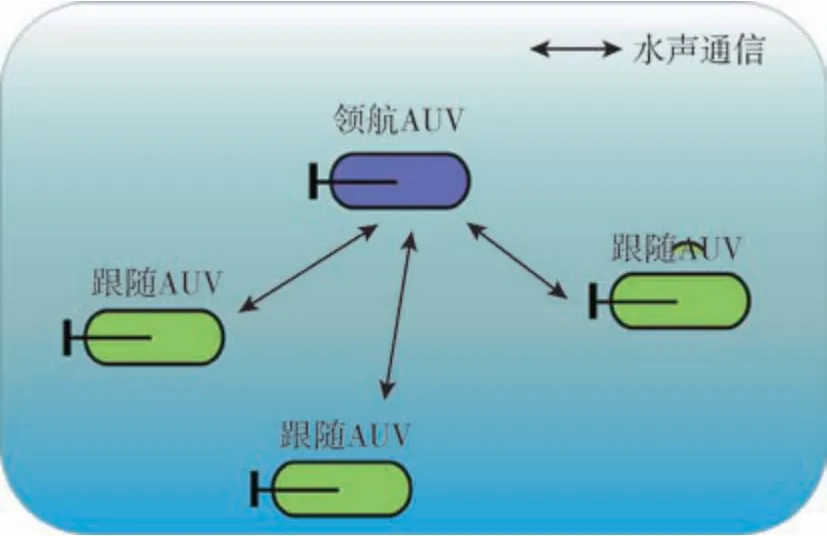
图7 主从式协同导航Fig.7 Diagram of master-slave cooperative navigation
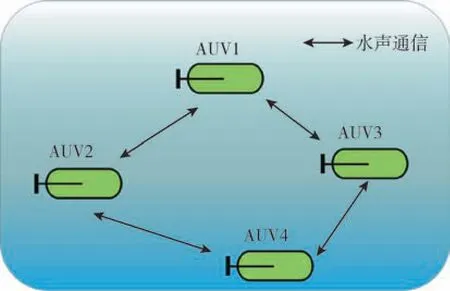
图8 并行式协同导航Fig.8 Diagram of parallel cooperative navigation
国外大多采用主从式多UUV 协同导航系统,如美国麻省理工学院海洋机器人实验室研究的“自主协同的分散侦察与探测系统”。 2014 年, 欧盟第七框架计划资助了名为“自主认知潜水合作行动” (Cognitive Autonomous Diving Buddy, CADDY)的项目[39], 该项目开发了一种高效的水下航行器引领-跟踪系统(Leader Tracking System, LTS),如图9 所示, 主要是使用AUV 取代潜水员, 并增加一种自主水面航行器(Autonomous Surface Vehicle, ASV)以提高监测、协助和潜水员任务的安全性。 该项目在试验过程中收集并验证潜水员的跟踪、监测、引导和通信等人机交互活动[40]。
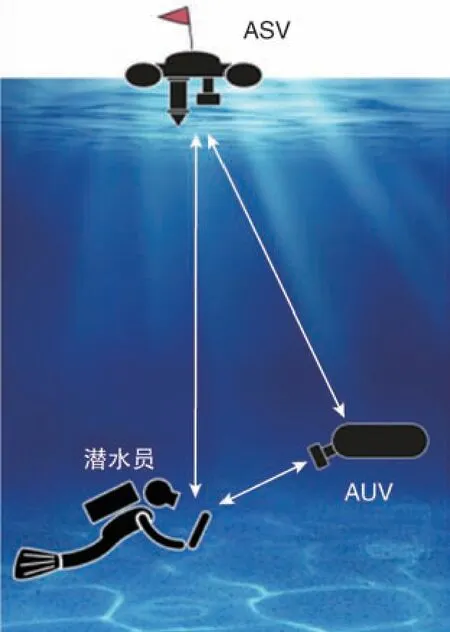
图9 引领-跟踪系统Fig.9 Diagram of leader tracking system
同样获得欧盟第七框架计划资助的“自组织、逻辑连接物理节点海洋机器人系统” (Marine Robotic System of Self-organizing, Logically Linked Physical Nodes, MORPH)项目提出了水下AUV 传感器载体的新概念, 该载体由若干个携带有独立传感器的水下机器人组成, 它们位于不同的海底地形环境中。 目前, 该项目已被应用于在较浅水域中密集编队的AUV 舰队导航[41]。
国内的沈阳自动化所海洋信息技术装备中心在2017 年12 月进行了两次UUV 水下自主对接技术验证试验, 在该项技术研究方面取得了实质性突破。 并在此基础上于2018 年12 月开展了动动对接技术验证, 完成了UUV 与水下动基座的自主对接技术验证试验, 成功实现了水下动态条件下的UUV 自主对接[42], 对接过程如图10 所示。
协同导航主要依靠各AUV 之间的水声通信进行彼此定位, 而水声信号的传播能力受水下复杂地形和水中噪声、温度、盐度或流速等多种环境因素影响, 因此针对水下通信的抗干扰能力值得深入研究。 另外, 由于协同导航任务中有时需要与水面指挥机构进行通信协作, 那么又面临着如何稳定、可靠地实现实时跨介质数据传输的问题。
2.6 全源导航
全源导航就是利用所有可利用的导航设备和辅助传感器, 集各家之所长, 在各类型的任务和环境中为用户提供卫星信号拒止时的高精度导航功能, 能够随环境变化快速实现系统重构并进行在线配置的新型组合导航系统。 全源导航具有导航传感器多样化、兼容范围大等特点, 具有容错性强、可快速迭代、能够面向各种应用环境等优势。
2016 年, 美国国防部高级研究计划局(DARPA)启动了“深海导航定位系统” (Positioning System for Deep Ocean Navigation, POSYDON)项目[43]。该项目旨在变革水下导航方式, 通过在深海海底布放少量声源, 综合运用水下声波信号、水面浮标、水下信标或节点、GPS 信号, 能够快速地确定水下执行任务的潜艇和无人潜航器等水下平台获得连续高精度的水下导航信息, 不需要定期上浮,充分保证了自身的安全性和执行任务的高效性。
与此同时, 俄罗斯也正在开展新型水下导航系统的研制工作。 该新型水下导航系统由“格洛纳斯” 导航系统、声呐浮标、无人潜航器组成,将布设在俄罗斯北冰洋大陆架上, 综合运用超短波通信和水声通信等方式, 可与空中、水面和陆地的控制中心实时交换信息, 并借助深海浮标为AUV 提供米级以下的高精度导航定位服务。
此外在“十五” 期间, 由国家“863” 计划资助的我国首套水下GPS 高精度定位导航系统完成研制[44], 该系统主要由GPS、差分GPS 基准站(可选)、四个以上GPS 浮标、安装在水下目标或载体上的水下导航收发机、陆基或船基数据处理与监控中心(简称数据控制中心)、水上无线电通信链路和水下水声通信链路组成。 该系统在千岛湖的试验表明: 对于水深45m 左右的水域, 系统的水下定位精度为5cm, 测深精度为30cm, 水下授时精度为0.2ms, 且测量误差不随时间累积。 但该系统海面的浮标个数有限, 多余观测量不足, 定位精度尤其是高程精度还需要进一步提高, 同时系统在整体性能、工程化和实用化方面还有待加强[45]。
3 AUV 导航系统的发展趋势
结合前文论述, 目前AUV 导航系统仍是以惯性导航系统为主、其他导航方式为辅的架构。 然而, AUV 导航系统因为受惯性导航系统累积误差的影响, 无法在脱离有源辅助导航定位情况下执行航时数十天甚至数月的任务, 需要进行不定期的上浮, 借助GPS 进行校准。 因此, 惯性导航精度决定了AUV 任务的有效执行时间。
除此之外, 新型导航技术存在许多客观问题和技术瓶颈, 如地球物理场导航技术存在地磁场易受干扰、重力变化缓慢等物理场信息辨识困难的问题, 虽然SLAM 和VSLAM 导航技术不依据先验地图, 但是在水下环境中如何实现快速有效的特征提取、如何提高系统鲁棒性等方面需要不断摸索和创新。 协同导航原理较为简单, 短期内是一种切实可行的方式, 但是其短板在于水中通信及水下与水面的跨介质通信能力不足。 仿生导航作为一种前沿领域技术, 目前仍处于基础研究阶段, 短时间内不会工程化, 但是其研究成果或可能改变未来的导航方式。 全源导航优势和意义均较为突出, 但是建立全源导航成本较高, 且对应用背景辨识能力、检错容错能力、系统智能化重构能力提出了较高要求。
随着海洋探索和军事任务的深远海、长航时发展需求不断加强[46], AUV 将在多样化、智能化等方面迎来跨越式发展。 因此, 为了满足AUV 的应用需求, AUV 导航系统需要在惯性导航精度和导航系统集成化、小型化、智能化等方面不断进步, 与其他导航、通信系统形成高精度导航体系。
3.1 惯性导航精度不断提升
受限于新型导航技术的不成熟或应用环境,在GPS 拒止条件下, 需要惯性导航系统具有更高的精度, 以适应AUV 的深远海、长航时发展需求。
法国iXblue 公司研制的水下导航系统Phins Compact C7 采用了高精度的光纤陀螺, 其航向精度最高可达0.01°, 姿态精度可达0.01°, 无DVL辅助的情况下其位置精度为0.5%D, 当有DVL 辅助时其位置精度最高可达0.01%D。 2018 年, 法国赛峰公司报道其半球谐振陀螺在2000h 内的零偏稳定性优于0.0001(°) /h(1σ), 标度因数非线性低至1 ×10-7, 相比于其他陀螺具有明显的优势[47]。
除此之外, 随着量子光学技术的不断突破,基于原子陀螺的量子导航系统应运而生, 其中的原子干涉陀螺理论精度可达到10-13(°) /h 量级, 可大幅消除累计误差带来的影响, 为目前最具潜力的惯性导航系统。 美国已于2006 年开始了“精确惯性导航系统” (Precise Inertial Navigation System,PINS)研究计划, 在该项目支持下, 美国斯坦福大学的Kasevich 团队于2008 年研制出了世界上第1套原子干涉陀螺, 其测量精度为2.3 ×10-3(°) /h。同在该项目支持下, 美国AOSense 公司研制的原子干涉陀螺精度达到了5 ×10-6(°) /h。 博世公司宣布在原子陀螺仪上取得突破性进展, 未来有望量产出一款精度为0.02(°) /h 的原子陀螺仪。 国内的研制单位主要集中在清华大学、北京航空航天大学、国防科技大学、航天十三所、航天三十三所、中科院上海光机所, 目前的研制进展与国外相比仍有一段距离。 因此, 随着导航技术的不断进步和迭代, 量子导航的发展未来可期, 它将很大程度上解决长期困扰人们的惯性器件累计误差问题。
3.2 导航系统集成化、小型化
面对AUV 的多样化发展趋势, 其共同点是能够装载更多的载荷、执行更复杂的任务, 这就要求水下导航系统在体积更小的同时还能够集成更多的导航传感器。 SPRINT-Nav 导航系统是Sonardyne 公司研制的高精度一体式混合海底导航系统,该系统包括了Sonardyne 公司研制的SPRINT 惯性导航系统、Syrinx 600kHz DVL 和高精度智能压力传感器。 其中, SPRINT-Nav 700 配备了性能最高的惯性器件, 包括霍尼韦尔的环形激光陀螺仪和加速度计, 保守引用精度为0.04%2dRMS。 此外,随着水下滑翔机的应用不断扩大, 其受能源、体积等因素限制, 由MEMS 惯性器件构成的低功耗、小体积惯性导航系统将备受青睐。
3.3 导航系统智能化
随着新型水下导航技术的不断发展成熟, 多种水下导航系统辅助惯性导航系统的局面将更加明显和牢固。 多源信息融合技术将会获得突破性的发展, 使得导航算法更灵活, 能够很大程度上克服上述各导航系统带来的问题, 实现优势互补,可以快速根据环境变化对导航系统进行配置、重构, 使其具有更强的鲁棒性和容错性, 同时可以执行更复杂的作业任务, 如多个AUV 进行协同导航、建立水下环境感知网络、提高水下环境监测能力和范围。
3.4 导航系统体系化
2016 年9 月初, 美国海军发布的新版《水下战科技目标》 中明确提出了两个重点关注领域,即水下机动作战和水下精确定位导航授时。 该文件指出, 对于执行水下任务的设备, 能够精确定位自身是至关重要的, 未来水下装备需要新的定位导航授时方法, 在敌方拒止区域将定位导航授时误差降到最低。 因此, 美军也正在加紧构建海陆空天GPS 拒止区域的高精度导航定位授时体系,如图11 所示[48]。
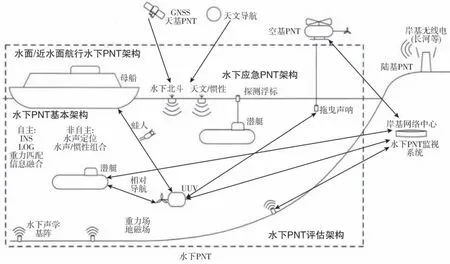
图11 海陆空天PNT 体系构想Fig.11 Conception of PNT system for land, sea, air and space
未来, 水下导航系统将综合利用自主导航系统和非自主导航系统, 借助水声通信与卫星导航系统进行交互, 通过高精度原子钟的守时/授时技术形成水下PNT 体系, 为水下运载体提供高精度、高可靠性的实时PNT 信息服务。
虽然我国已初步形成天基、陆基和空基的PNT系统, 但是水下PNT 体系建设还是一片空白, 因此我国水下导航的体系化建设仍任重而道远。
4 结论
随着原子陀螺等惯性仪表精度的不断提升,惯性导航系统在未来水下导航中仍将发挥不可替代的作用。 而随着地球物理场导航以及仿生导航、视觉导航等新兴导航技术的不断进步, 高精度、小型化、智能化、体系化将是水下导航系统发展的主方向, 这将成为未来AUV 迈向深远海以及向长航时、多样化、智能化发展过程中极为关键的保障条件。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
湖北农机化(2020年4期)2020-07-24
电子制作(2018年11期)2018-08-04
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
测绘科学与工程(2016年5期)2016-04-17
中国惯性技术学报(2015年1期)2015-12-19
电子设计工程(2015年3期)2015-02-27