
机翼型闸墩量水闸门自动测流系统研发
2023-08-09 09:33王世隆王文娥刘政光陈土成刘渡坤胡笑涛
灌溉排水学报 2023年7期
王世隆,王文娥,刘政光,陈土成,刘渡坤,胡笑涛
(西北农林科技大学 旱区农业水土工程教育部重点实验室,陕西 杨凌712100)
0 引 言
【研究意义】灌区量水是促进节水农业发展、提高灌溉水利用率的一项基础性、关键性技术[1],渠系流量自动化测量是实现灌区现代化的关键。但目前我国灌区渠系测流系统不配套,特别是小型渠道自动测流系统匮乏,急需研发测流精度高、适用性强的自动测流系统[1-3]。【研究进展】目前,灌区干支渠流量测量技术比较成熟、测流设施较完善,但由于斗渠及以下渠道数量大、类型复杂、费用较高等原因,量水设施建设程度不高。为了促进灌区现代化管理水平,我国从20 世纪50 年代就开始引进及研发渠系量水设施,目前量水设施超过百余种,如巴歇尔量水槽[4]、直壁式量水槽[5]、长喉道量水槽[6]、机翼形量水槽[7]等,均具有较高的测流精度,但不具备控制流量、调节渠道流量的作用。节制闸和分水闸是常见的渠系建筑物,具有调节渠道水位和流量的功能,闸门还具备测量流量的功能[8],可以利用渠系闸门实现流量的测量与调控。随着量测技术和自动化技术的发展,关于渠道自动化测控设施的研发已成为热点。Goel 等[9]研发出一种在自由流和淹没流下都可使用的流量计。Michalski等[10]提出应用超声波法测量流量的思路,并说明了测流的误差来源以及对精度的影响。张从鹏等[11]设计了一种远程自动控制计量闸门系统,包含基于ARM 的主控与存储电路、液晶显示屏模块等硬件平台;王家琪等[12]将自动化测控与矩形薄壁量水堰结合,设计出水头可调的测控一体的量水堰;林俊[13]将上下游水位测量和闸门控制结合测流,采用PIC 系列单片机作为远程终端控制处理器,通过室内试验拟合闸孔出流流量系数公式;王启飞等[14]研发出测控一体化闸门系统,在闸门后安置巴歇尔量水槽测流,根据流量需求调节闸门开度进而控制干、支渠分流量。韩宇等[15]针对弧形底部渠道流速分布特征,推导流速传感器特征测点的位置表达式,提高了弧底渠道测流精度。【切入点】前人的研究多集中在闸门测控设计方面,关于闸墩体型对于闸门测流的影响研究较少。利用平板闸门量水具有无二次水头损失和可控制流量的优点,但是在闸门全开时,闸门的闸墩型式会对测流精度产生影响,当闸门开度较大时会形成堰流,导致测流精度降低。将量水槽体型曲线应用在闸墩上,在闸门开度较大时可利用闸墩形式的量水槽测流,既减少了局部水头损失又提高了测流精度。机翼形量水槽的试验研究和实际应用已有很多,而且已完成了标准化和系列化工作[15-18]。陈土成等[19]将机翼形量水槽改造作为平板闸门的闸墩,形成流量测控一体装置,命名为机翼型闸墩量水闸门,通过试验分析其水力性能,可为系列化开发提供理论基础。但机翼型闸墩量水闸门尚未实现流量自动测量。【拟解决的关键问题】因此,本文选取机翼型闸墩量水闸门作为流量测控一体量水设施,在明确其测流原理的基础上,应用超声波传感技术收集水位和闸门开度信息,以STC89C51RC 为核心处理运算,研发渠系自动测流系统,可用于灌区渠系水位流量等信息的自动测量与控制。
1 渠系自动测流系统设计
为了实现渠系流量自动测量,渠系自动测流系统包括流量测量设施、数据处理与通讯设施及动力设施3 个主要组成部分。其中水位流量测量设施为现地设备,由量水设施、水位传感器、闸门开度传感器构成;信息处理与通讯设施包超声波测距模块、数码显示模块和程序下载模块等;动力设施包括光伏板、蓄电池等,测流设施如图1 所示。该系统可实现渠道水位测量、瞬时流量计算、累计水量计算、数据传输、电源供电等功能。
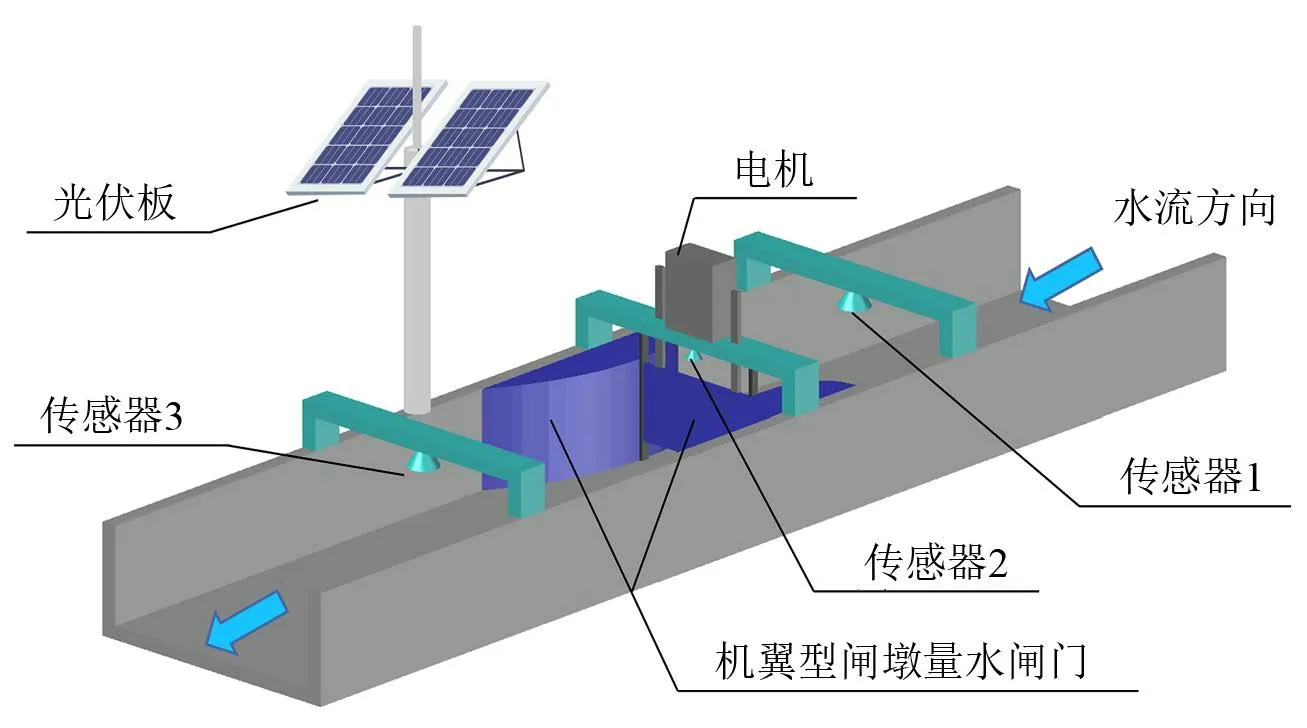
图1 测流设施示意图Fig.1 Schematic diagram of flow measuring facilities
1.1 流量测量设施设计
利用渠系上的闸门测流时,在闸墩和闸门的作用下,水位及闸门开度不同时,闸门对水流控制作用不同,会形成闸孔出流及堰流。常见的分水闸及节制闸的闸墩结构简单,形成堰流时不具备较高精度的测流条件。由于机翼形量水槽具有测流精度高且水头损失小,本文提出采用机翼形量水槽作为闸墩,结合直升式矩形平板闸门组成机翼型闸墩量水闸门测流设施(图1),在闸门开度较大形成堰流时利用闸墩量水,闸门开度较小时为闸孔出流。由能量方程和恒定总流的连续性方程推导,可得自由出流流量计算式为:
式中:Q为过闸流量(L/s);b为过流宽度(cm);e为闸门开度(cm);H为闸门上游稳定处水位(cm);g 为重力加速度,取9.81 m/s2;µ为闸孔自由出流的流量系数。
当闸门下游水深影响上游出流时形成淹没出流。淹没出流下的流量计算式为:
式中:m为淹没出流流量系数;H为闸门上游稳定处水位(cm);ht为闸门下游稳定处水位(cm)。
当闸门开度较大,水流脱离闸门底缘时,闸门失去约束作用,水面连续降落,闸孔出流转化为堰流,可用量水槽测流。机翼形量水槽通过束窄过水断面使得水流势能转化为动能,在喉口断面附近形成临界流,通过测量上游水位即可求得流量,具有稳定的水位-流量关系。根据已有研究,机翼形量水槽的流量公式[15]:
式中:a、n为经验系数,需要通过模型试验得出;Bc为量水槽喉口宽度(cm);HL为量水槽上游稳定水位(cm)。根据以上测流原理可知,通过测量闸门开度e、闸门上游水深H及下游水深ht,判断是闸孔出流还是堰流、自由出流还是淹没出流,确定流量系数及淹没系数,即可得到通过设施的流量,因此需要建立机翼型闸墩量水在闸孔出流及堰流条件下的流量系数及淹没系数。
1.2 流量公式
为拟合堰流和闸孔出流流量系数公式,在矩形渠道上进行测流试验。矩形渠道宽0.6 m,深0.3 m,长12 m,采用水泥抹面,糙率n为0.013。渠身为预制混凝土,底部砌砖作为支撑,接缝处采用水泥防渗。为保证渠道有较大的过流范围,选择收缩比为0.58的机翼形量水槽作为闸墩,翼长60 cm,翼高12.6 cm。平板闸门长34.8 cm,宽30 cm。闸门上下游水位采用精度为±1 mm 的SCM60 型测针进行测量,渠道流量由电磁流量计测量。试验系统由潜水泵、蓄水池、电磁流量计、稳水池、矩形渠道槽、尾阀和回水渠道组成。试验现场布设和整体设计如图2 所示。试验设置闸门开度变化范围5~14 cm,变化梯度1~2 cm,选定流量范围10~60 L/s,变化梯度2~5 L/s。
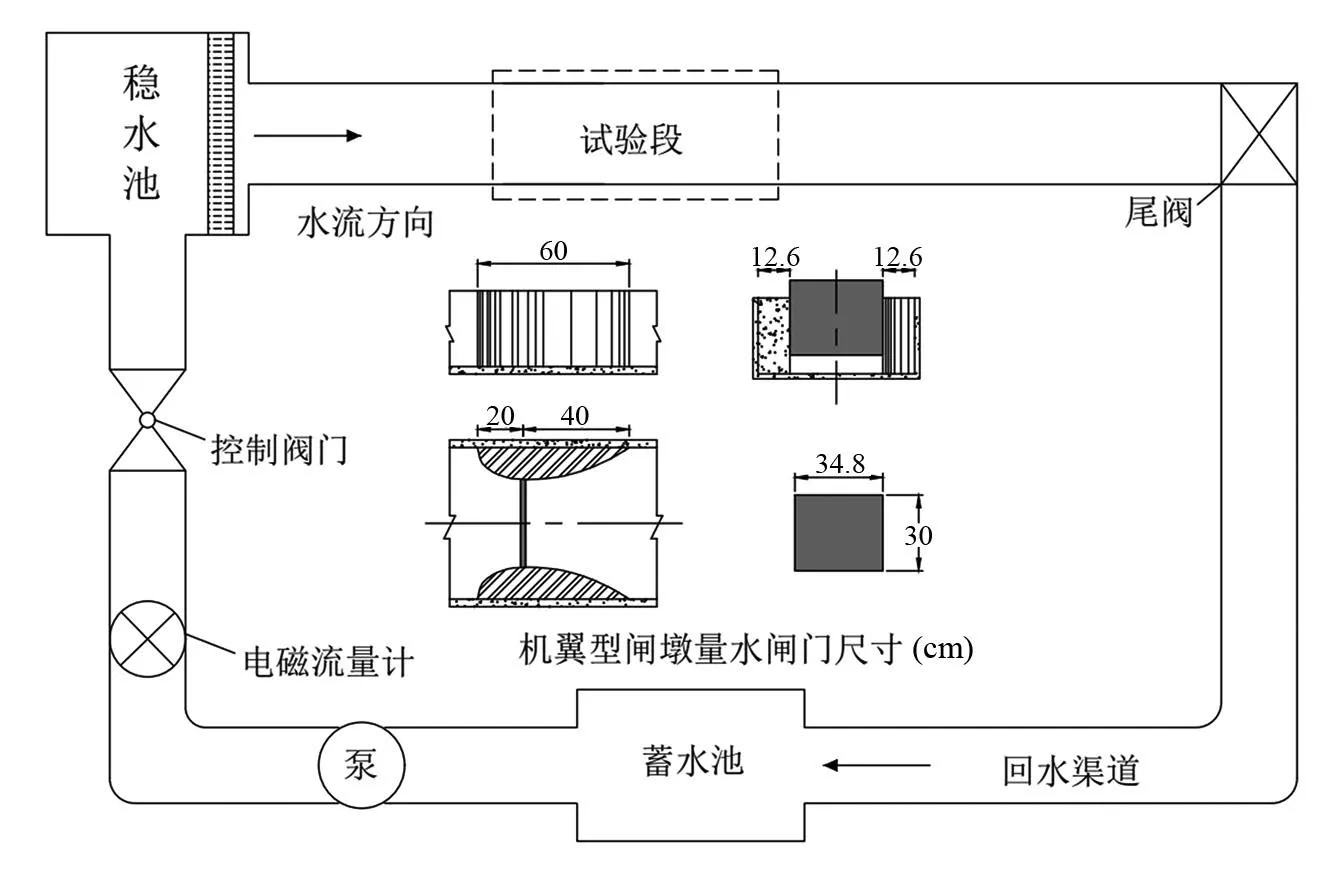
图2 试验布置Fig.2 Layout of the experimental setup
1.2.1 闸孔出流
闸孔自由出流流量公式的形式已确定,流量Q、闸门开度e和上游水位H均可测量得到,代入式(1)求得流量系数μ。拟合自由出流各流量下的相对开度与流量系数,得到自由出流流量系数与相对开度的关系式:
自由出流流量系数μ都随着闸门相对开度的增大而减小,在相同流量下,闸门开度越大上游水深越小。由复相关系数R2=0.951 可知相关性良好。
在试验中调节渠道尾门改变下游水深,当影响到上游水深时,即形成淹没出流,此时除了测量上游水深之外,还需要测量下游水面较稳定处的水深,过闸流量与上下游水深有关。与自由出流类似,将试验中测得的Q、e和ΔH代入式(2)即可得出淹没出流下的流量系数m,拟合得到m的表达式为:
R2=0.919 相关性较好,可以看出,淹没出流流量系数随闸门相对开度增大而增大。将闸门下游稳定处水位ht与闸门上游稳定处水位H之比定义为淹没度,根据不同闸门开度下的淹没度判断当前是否为淹没出流。分析试验数据得知,不同闸门开度范围下的淹没出流条件为:
随着闸门开度的增大,需要更大的淹没度才能达到淹没出流。当满足以上条件时,按式(2)和式(5)计算过闸流量,否则按式(1)和式(4)计算。
1.2.2 堰流
试验中调整闸门开度,使水流脱离闸门底缘,形成堰流。以机翼形量水槽作为测流设施,测得上游水深,与渠道流量拟合,得出机翼形量水槽测流公式:
R2=0.999 7,相关性极好。在堰流状态下,流量随水深增大而增大,而且水深越大对流量的影响也越大。式中,HL为上游稳定处水位(cm),渠道流量Q(L/s)。将拟合的闸孔出流流量公式计算值与试验实测值相比,吻合度较高,如图3 所示,其中自由出流和淹没出流下相对误差绝对值的最大值分别为2.98%、4.92%,最小分别为0.01%、0.04%,平均误差为0.85%、1.25%,表明机翼型闸墩量水闸门具有较高的测流精度,符合灌区渠道量水要求。
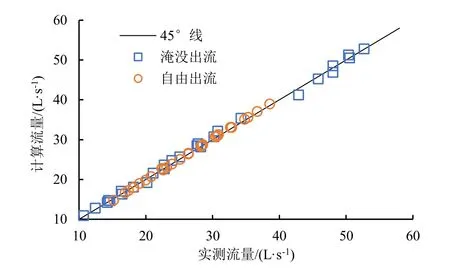
图3 实测流量与计算流量对比Fig.3 Comparison of measured discharge and calculated discharge
1.3 孔堰流形态判别阈值
机翼型闸墩量水闸门有堰流和闸孔出流两种形态。闸孔出流与堰流的测流公式不同,形态判别对测流精度有重要影响。闸前水位下降,闸门开度增大时,水流逐渐脱离闸门底缘,在机翼形量水槽的束窄作用下,收缩段渠道中线水深略有壅高,将水流即将脱离闸门底缘的状态称为临界状态。闸门为平底坎时,一般认为闸门相对开度e/H>0.65 为堰流,e/H≤0.65 为闸孔出流,判别阈值受到闸门、闸墩及底坎形式的影响[20-21]。张敬楼[22]认为以0.65 为界较为粗略,没有考虑底坎高低和形状以及闸门布置形式等因素。闸底坎和闸墩形式的改变都会影响判别阈值,邱勇等[23]分析了驼峰堰和WES 堰形的孔堰流判别阈值,随着闸门开度和流量的增大,判别阈值逐渐增大;李红等[8]研究发现,梯形渠道平板节制闸的孔堰流判别阈值在0.78~0.81 之间,随主渠道流量增大而增大。机翼型闸墩量水闸门的判别阈值有类似的规律。水流流过机翼型闸墩量水闸门时,过流断面先逐渐收缩再扩散,在闸门前端的收缩段处受到闸门挡水和闸墩收缩的影响,渠道中线水位升高,使得临界状态下的闸门开度略有抬升,临界开度相应增大,导致判别阈值发生变化。试验过程中通过调节闸门开度和渠道流量,记录临界状态下的各数值如表1 所示。渠道过流量为10~60 L/s 时,临界相对开度值发生变化,不再是0.65,而是在0.77~0.82 之间变化,平均值为0.80,在流量大于10 L/s 时,相对开度临界值随着流量的增大小幅度上升。

表1 临界状态下相对开度值Table 1 Relative opening value at critical state
2 信息处理与通讯设施
根据测流原理及流量计算公式,在闸门上下游和顶部安设超声波传感器,将采集的距离信息进一步处理计算得到闸门上下游水位和闸门开度,通过内置软件计算输出渠道实时流量。
2.1 系统设计框架
本测流系统主要由包含以下模块:供电模块、程序下载模块、超声波测距模块、数码显示模块。以STC89C51RC 单片机为核心采集距离信息,经处理输出水位、流量信息。系统控制单元结构框图如图4 所示。
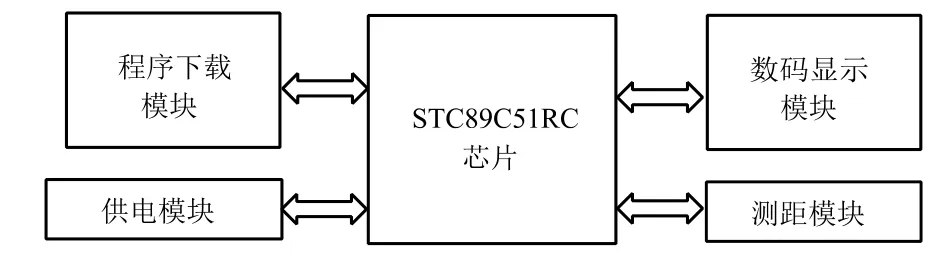
图4 系统结构框图Fig.4 Diagram of system structure
2.2 主芯片电路
本测流装置采用STC89C51RC 为主控芯片。STC89C51RC 芯片共包含4 组8 位并行端口,其低功耗模式掉电<0.1 μA,可外中断或专用定时器唤醒,2个16 位定时器。时钟电路方面,设置一个振荡频率11.059 2 MHz 的晶振,并外接2 个22PF 电容。为保证装置运行稳定,需要设置复位电路,无论系统当前处于何种状态,按下复位按键即可恢复到初始状态。单片机通过端口驱动传感器工作或实现其他功能[24],P3.0 端口和P3.1 端口用来下载程序,P1.2~P1.7 端口驱动3 个超声波传感器,P0.0~P0.7 端口和P2.5~P2.7端口驱动显示屏LCD1602。主芯片引及晶振电路如图5 所示,复位电路图如图6 所示。
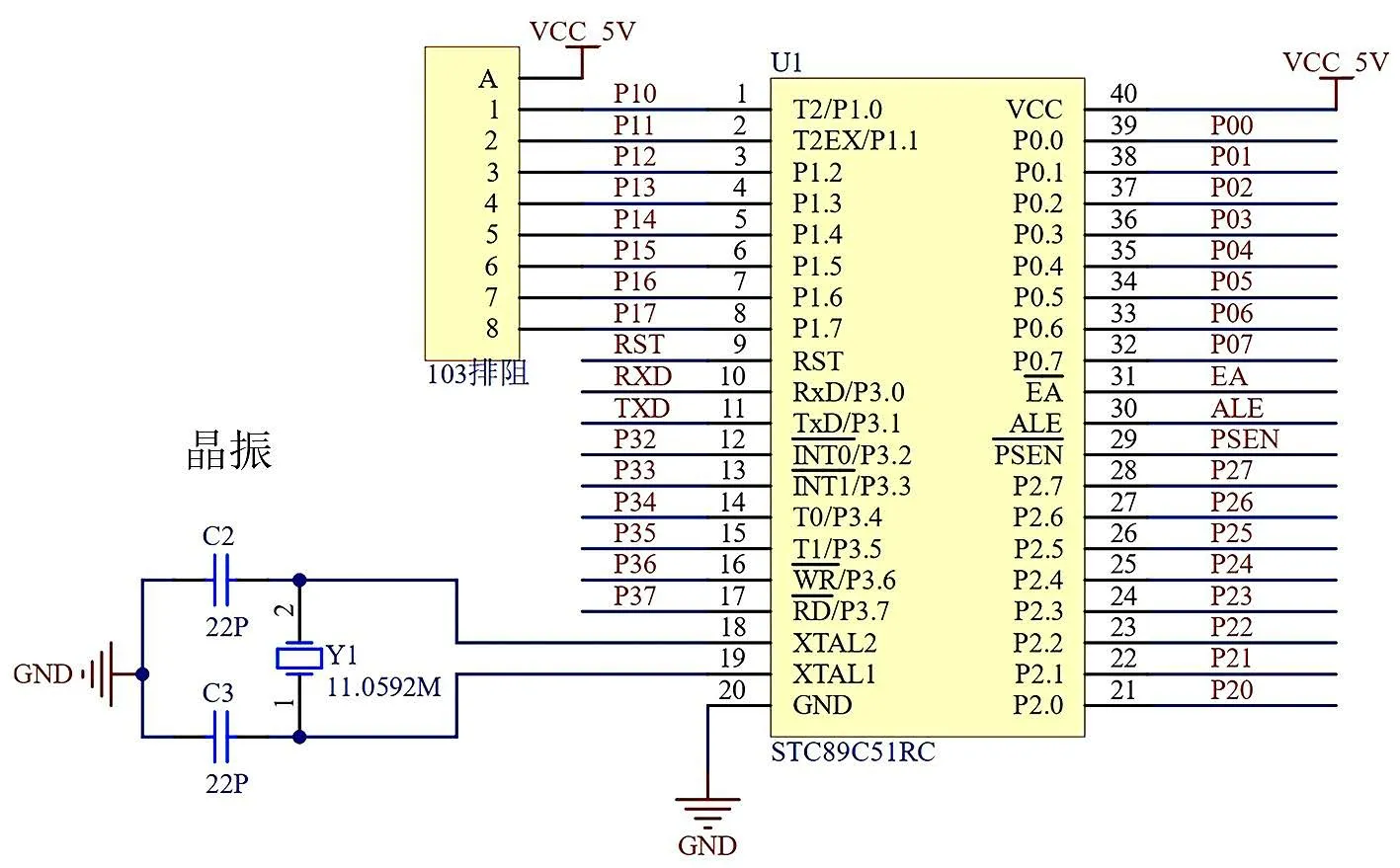
图5 主芯片电路图Fig.5 Circuit diagram of the chip
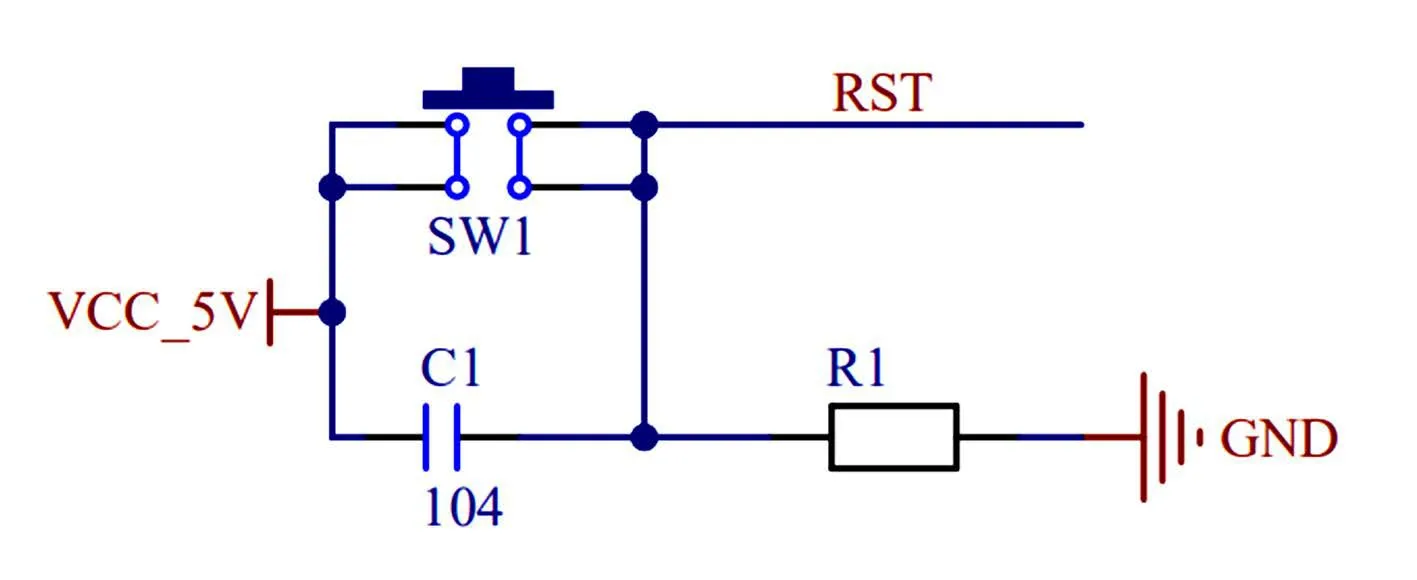
图6 复位电路图Fig.6 Reset circuit diagram
2.3 超声波测距模块
利用机翼型闸墩量水闸门测流,首先需要根据测得的上游水位和闸门开度判断当前形态,再应用流量公式计算出当前渠道流量。超声波测距作为一种非接触式测距方式,通过发射和接收超声波脉冲的时间间隔计算出目标物体与传感器之间的距离,适用于水位和闸门开度的测量。HC-SR04 超声波传感器测距模块可提供2~400 cm 的非接触式距离感测功能,测距精度可达3 mm,受光照、电测波等干扰较小,适用于渠道水位测量采集。HC-SR04 超声波模块包含2 个通用的压电陶瓷超声传感器,分别用来发出和接收超声波信号。为了将信号稳定地传输到单片机,需要用外围信号放大器提高发出信号的功率。模块有4 个引脚,VCC、TRIG(控制端)、ECHO(接收端)、GND,其中VCC接5 V电源,TRIG控制发出超声波信号,ECHO接收反射回的超声波信号,连接电路如图7 所示。
图7 超声波传感器电路图Fig.7 Circuit diagram of ultrasonic sensor
模块采用IO 口TRIG 触发测距,当有一个大于10 μs 脉冲触发信号时,模块内部自动发送8 个40 kHz的方波,自动检测是否有信号返回;有信号返回,通过IO 口ECHO 输出一个高电平,用计时器记录高电平持续的时间,即信号从发射到接收的时间[25]。测量距离按式(8)计算。
式中:Δh为超声波传感器到待测物表面的垂直距离(m);t为高电平持续时间(s);v为超声波传播速度,取340 m/s。采集到超声波传感器测得距离信息后,为获得相应的水位及闸门开度,按式(9)换算:
式中:对于超声波传感器1 和传感器3,H0为传感器与渠道底部的垂直距离(m),对于超声波传感器2,H0为闸门闭合状态下,传感器与闸门顶部的垂直距离(m)。在测流过程中,超声波传感器1、传感器3 用来测量闸门上下游稳定水面的断面水深,分别需要安装在闸门上游2~3 倍的渠道深度及下游3~4 倍渠道深度处。超声波传感器2 则需安装在平板闸门顶部上方超过1.2 倍的闸门高度处。根据试验情况,确定超声波传感器1、传感器3 分别安装在闸门上下游0.8 m 和1.2 m 处,闸门闭合状态下,超声波传感器2 安装在闸门顶部上方0.36 m 处。
2.4 数码显示模块
本测流系统主要显示闸门上下游水位、开度及渠道流量信息,占用空间较小,为减小功耗,显示模块选取LCD1602 显示屏。LCD1602 是一种字符型液晶显示模块,具有辐射低,抗干扰,体积小,功耗低的优点。LCD 电路图如图8 所示。
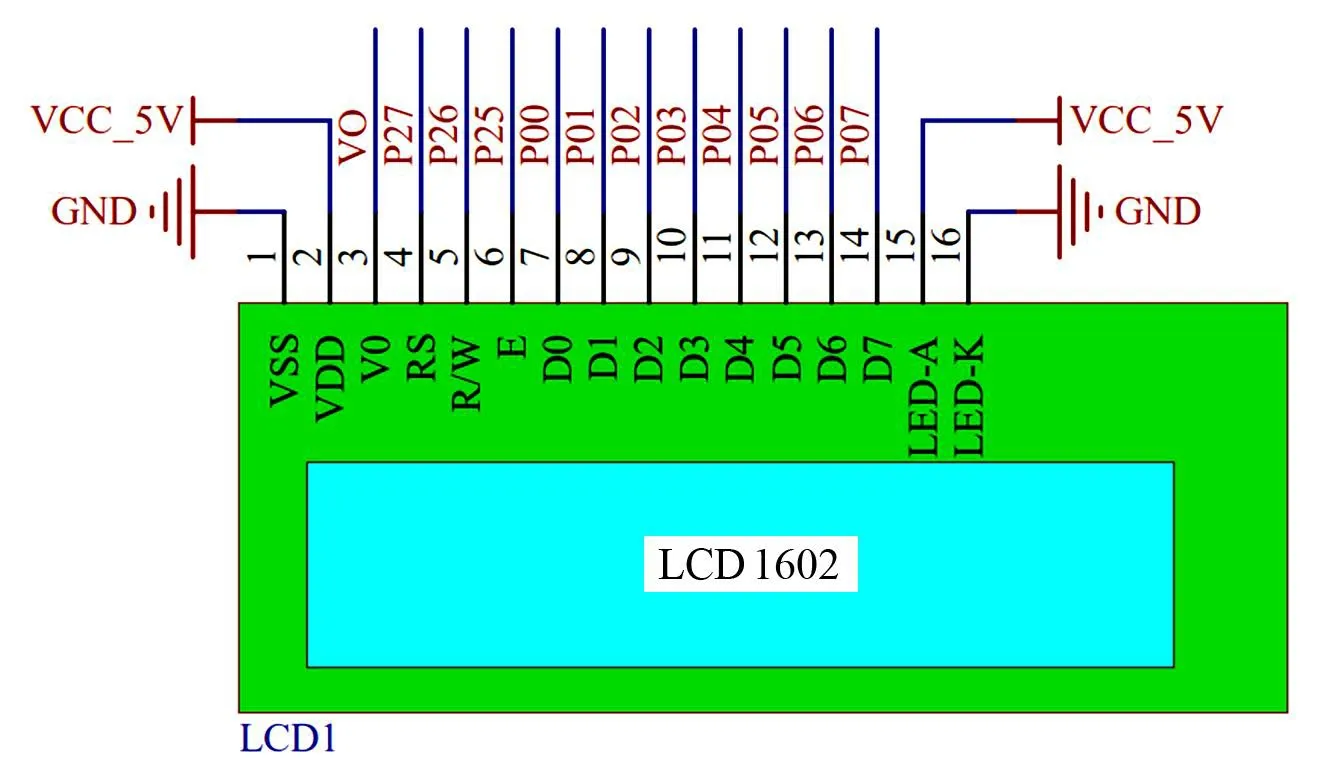
图8 LCD1602 电路图Fig.8 Circuit diagram of LCD1602
2.5 软件设计
装置软件在Keil uVision5 中采用C 语言开发。程序编写完毕后,可使用STC_ISP_V6 软件下载到单片机中。首先,给装置供电,发送读取脉冲,分别获取3 个超声波传感器的测量距离并保存,等待后续处理,然后进行显示屏初始化,对已采集的距离信息作初步判断输出到显示屏上,3 个传感器输出距离的时间间隔为100 ms;根据传感器布设高度换算出对应的水位和开度信息,判断当前水位是否在渠道运行状况设定合理的水位范围之内;根据闸门开度和水位判断是否为堰流,若为闸孔出流则需根据淹没度进一步判断是否为淹没出流,然后计算不同出流状态下的流量系数及过闸流量,最后将流量值输出到显示屏。系统软件流程图如图9 所示。
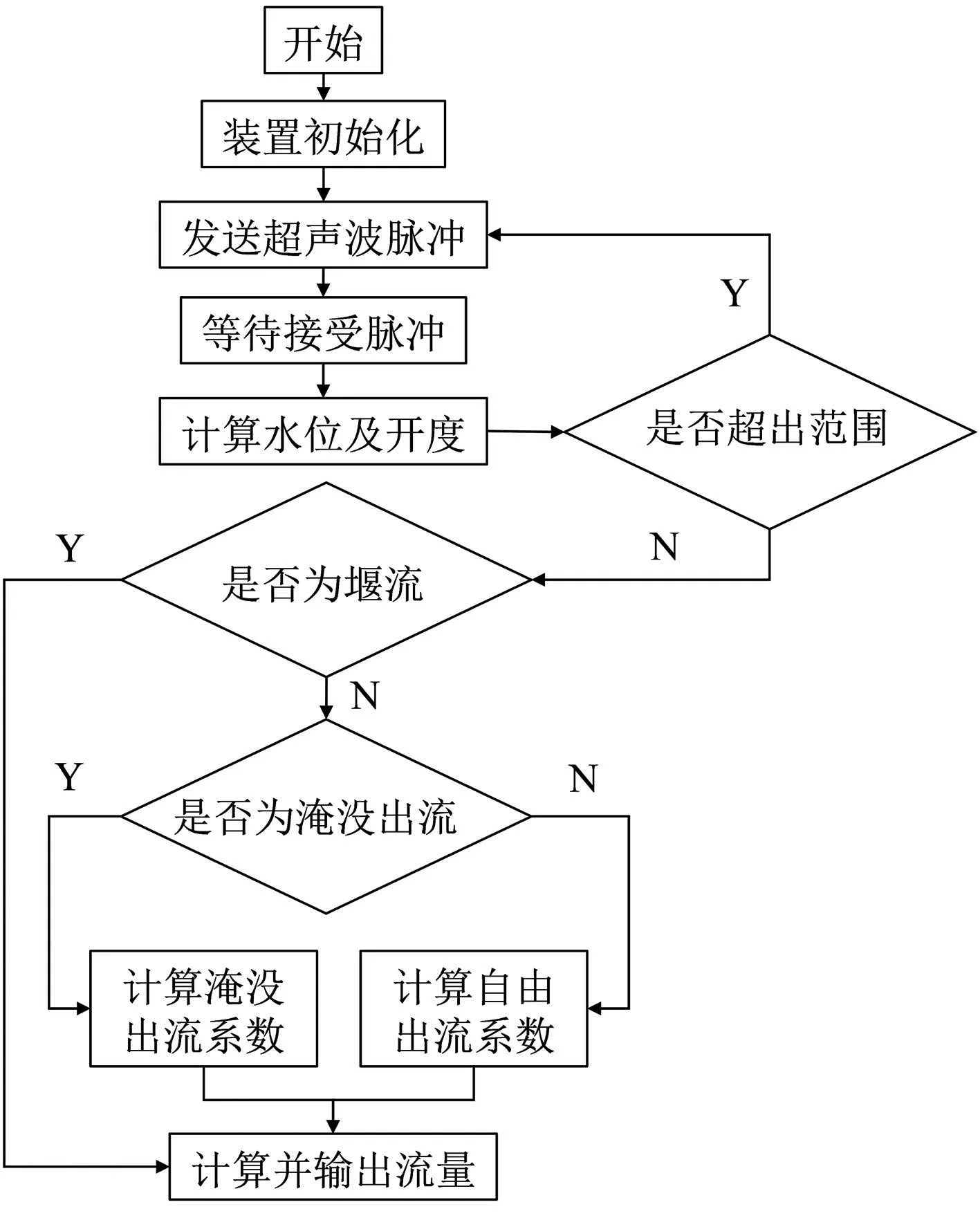
图9 软件流程图Fig.9 Software flow diagram
2.6 动力设施
动力设施包括光伏板、蓄电池等。考虑到灌区渠道闸门多在野外运行,而且灌水期持续时间不定,不宜采用市电,因此本系统采用蓄电池组和太阳能光伏板组合装置供电。使用24 V 蓄电池作为整个系统的总电源,太阳能光伏板进行充放电管理,通过电源转换模块转换成5 V 给传感器模块、数码显示模块等供电,所采用的电压转换芯片为 LM2576 系列的LM2576HV-ADJ,其是降压型开关电压调节器,具备良好的线性和负载调节能力,改变内部电路的电阻值改变输出电压,可固定输出3.3、5 V 和12 V 电压[13]。
2.7 性能测试
在上述矩形试验渠道内检验测流装置的可靠性,将3 个超声波传感器分别用横杆固定,安设在闸门上游、闸门顶端以及闸门下游相应位置,开启水泵供水,调整闸门至合适开度,调节渠道尾阀,形成自由出流,等待显示屏上数据稳定再读数,并记录同一时刻下的电磁流量计读数;再次调节尾阀,抬升下游水位形成淹没出流,读取测流装置和电磁流量计流量数值;调整渠道控制阀门,改变渠道来流量,重复上述过程。将测流装置与电磁流量计计算的流量值相比,结果如表2 所示,不同开度下的流量值均较为接近,最大相对误差为6.19%,最小仅为0.30%,表明自动测流装置可靠性较高,满足灌区末级渠道的量水需求。
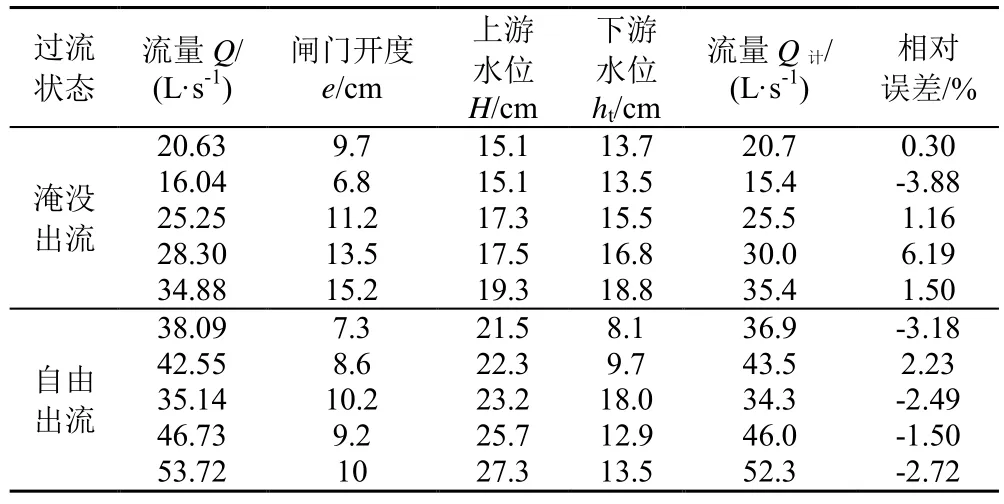
表2 测流装置水位流量测量值Table 2 Measurement value of water level and flowrate of measuring device
3 讨 论
在矩形渠道中,闸门量水和量水槽量水两种方法均非常成熟,对于闸门流量计算模型和量水槽水力性能研究已较为完善[26-27]。闸门结构简单、制作方便,还具有量水和控制流量的优点,但是在闸门全开且形成堰流的情况下,传统闸墩不具备测流功能。机翼形量水槽量水精度高、水头损失小,在灌区已进行推广使用,目前的研究方向主要为体形曲线的进一步优化[28]。机翼型闸墩量水闸门结合2 种量水方法的优点,闸门开度较大时闸墩具有量水槽的测流功能,在不同条件下均具有较高的测流精度,同时也具有流量控制功能,并进一步开发配套的自动测流系统,实现无人测流。与矩形渠道的其他量水设施对比,测流精度均比较接近。李伟等[29]进行4 种不同体形量水槽的模拟研究,公式计算流量值与模拟流量值平均误差为2.42%;贺梦杨等[30]研究便携式仿机翼形量水槽在矩形渠道中的水力性能,收缩比0.709 时的平均误差为4.91%;孙斌等[31]应用量纲分析和能量守恒原理建立不同底坡的无喉道量水槽测流公式,平均误差为3.16%、4.79%。由以上研究可知,量水槽体形曲线、收缩比和渠道底坡均对流量测量产生影响,流线型的体形曲线能减小水头损失,适当的收缩比可以提高测流范围并减小壅水高度。另外,平板闸门的位置在闸墩不同位置会改变闸门的过流宽度,进而影响流量公式,不同量水槽作闸墩时闸门的位置可能会有不同,需要进一步研究。本文通过室内模型试验研究了机翼型闸墩量水闸门在矩形渠道的测流原理,不同渠道形状下应对闸墩结构进行改造,机翼形量水槽在U 形渠道[32]和梯形渠道[33]中已有相关研究,可参考其中的布置形式。在实际应用中安置平板闸门时应在闸墩喉口处预留门槽。后续应针对不同闸墩曲线、收缩比、渠道形状和坡度下量水闸门测控系统进行研发。
4 结 论
1)机翼型闸墩量水闸门由机翼形量水槽和矩形平板闸门组成,测流原理是闸孔出流和堰流,在闸门底缘接触水流导致流线不连续时形成闸孔出流,当闸门开度较大时失去对水流的约束作用时形成堰流。临界相对开度为0.77~0.82。
2)在矩形渠道上选取收缩比为0.58 的机翼型闸墩进行试验,拟合出闸孔出流和堰流的测流公式,分析孔堰流判别阈值变化,公式的计算值与电磁流量计测值相比,相对误差在5%以内。
3)以STC89C51RC 为核心研发自动测流系统,采用蓄电池组和太阳能光伏板提供动力,利用超声波传感器测得水位及闸门开度值,判断过流形式,计算当前渠道过流量,输出到LCD 显示屏上。装置计算值和电磁流量计数值均较为接近,最大相对误差为6.19%,最小为0.30%。
(作者声明本文无实际或潜在的利益冲突)
猜你喜欢
黑龙江水利科技(2022年4期)2022-05-25
石河子科技(2022年4期)2022-03-24
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
电站辅机(2021年4期)2021-03-29
北京航空航天大学学报(2020年10期)2020-11-14
山东水利(2018年6期)2018-03-24
水利科技与经济(2016年8期)2016-04-22
航空学报(2015年4期)2015-05-07
振动、测试与诊断(2014年5期)2014-03-01
