遮挡情况下的行人检测方法研究
2023-08-04 02:55:18刘雯雯孙裕晶姜树辉姜鹏
中国农机化学报 2023年7期
刘雯雯 孙裕晶 姜树辉 姜鹏
摘要:障碍物检测是环境感知中的关键技术,直接影响到智能农机作业的安全性和可靠性,其中田间行人作为非结构、非固定的障碍物,是影响农机行驶安全的重要因素。遮挡情况是行人检测中的研究重点和难点,也是为满足农机自主作业的避障需求必须考虑的问题。因此对行人检测传感器技术和行人检测算法的国内外应用情况进行综述,重点关注各种检测技术和算法在复杂农田环境中的适用性。首先,梳理总结从单一传感器检测技术到多传感器融合技术的优缺点及其应用情况。其次,分别对利用传统方法和深度学习方法处理优化遮挡情况的行人检测算法的研究应用进行分析。最后,提出现有技术存在单一传感器技术的应用相对局限、多传感器融合技术的稳定性不足、行人检测算法对遮挡问题的处理效果有限等问题,同时对采集信息的多样化、无人机辅助避障、建立完整农田环境感知系统进行展望。
关键词:行人检测;障碍物检测;传感器;机器视觉;农田环境
中图分类号:S24
文献标识码:A
文章编号:20955553 (2023) 070179
08
Study on pedestrian detection methods under occlusion
Liu Wenwen, Sun Yujing, Jiang Shuhui, Jiang Peng
(College of Biological and Agricultural Engineering, Jilin University, Changchun, 130025, China)
Abstract: Obstacle detection is a crucial technology in environment perception, which directly affects the safety and reliability of intelligent agricultural machinery equipment operation. People working in the fields, as non-structural and non-fixed obstacles, are important factors affecting the safety of agricultural machinery. This paper reviews the application of pedestrian detection sensor technology and pedestrian detection algorithms in China and internationally, focusing on the applicability of various detection technologies and algorithms in complex farmland environments. Firstly, the advantages, disadvantages, and applications ranging from single-sensor detection technology to multi-sensor fusion technology are summarized. Secondly, the research and applications of pedestrian detection algorithms using traditional methods and deep learning methods to deal with occlusion are analyzed. Finally, it identifies limitations of current technologies, such as relatively limited application of single sensor technology, insufficient stability of multi-sensor fusion technology, and limited effect of pedestrian detection algorithm in handling occlusion. This paper proposes prospects for the diversification of collected information, UAV-assisted obstacle avoidance, and the establishment of a complete farmland environment sensing system.
Keywords: pedestrian detection; obstacle detection; sensors; machine vision; farmland environment
0 引言
隨着全球人口老龄化日趋严重,越来越多的国家倾向于使用更智能的半自动化或全自动机械从事生产活动,目标检测技术因此得到广泛应用[12]。行人检测作为目标检测的一种特殊情况,有着重要的研究价值和实际意义,当然它的技术进步也与一般目标检测的发展密切相关[3]。行人检测即对行人进行位置标定、姿态评估和活动预测,从而根据获得的信息进行下一步工作[4]。然而,受环境背景的复杂性、拍摄角度有限性、人体姿态多样性等因素影响,使得行人检测具有极大的挑战性。目前行人检测的研究多集中在城市和室外空旷环境,且通常关注的是行走或站立的人,在考虑遮挡情况的农田环境中的研究还不够充分。在复杂的农田环境中,人们不仅可能会被植被、作业设备或者其他物体所遮挡,而且可能存在各种各样的作业姿势也会提高遮挡程度,进而增加行人检测的难度[5]。对于田间作业区中的人畜如果作业机械不能实时发现并及时避让,不仅会影响农业生产效率,还会威胁农业工作设备、人员的安全。
本文对农业环境下行人检测传感器技术和行人检测算法的国内外应用情况进行总结。首先对不同传感器技术的研究应用情况进行分析梳理,探究能够更好地实现农田场景中遮挡行人检测的硬件设备;其次对近年来快速发展的遮挡行人检测处理算法的研究情况进行总结,侧重于适合在农业场景应用的技术;最后对亟待解决的问题进行总结并展望了未来可能的研究方向。
1 行人检测传感器技术
行人检测技术要求对周边环境进行非接触探测,以获取可能对机器系统产生影响的人畜等障碍物的各类信息。按照所使用的传感器的工作机理可以分为基于超声波、雷达、机器视觉、红外成像和基于多传感器融合等[67]。本节分析每一类的技术特点和应用情况,旨在针对农田作业区的系统开放性、非结构化、干扰信息多、人畜存在遮挡等环境特点,探究各种传感器技术在该场景中的适用性[8]。
1.1 超声波检测技术
超声波传感器是一种将超声波信号转换成以电信号为主的其他能量信号的非接触式传感器[9]。超声波检测的基本原理是通过传感器发出超声波,遇物体反射,在接收回波后计算超声波的飞行时间来确定物体的大致位置[10]。
近年来利用超声波技术来实现行人检测的试验研究不在少数,且取得了一定的成果。Guo等[9]提出了一种利用阵列式超声波传感器在低速交通混杂区检测区分行人、自行车和车辆的方法,虽然行人和骑自行车的人由于外形相似而较难被区分,但本研究有助于进一步拓展利用超声波传感器对同一事件中多个物体进行检测和定位的工作。Koyama等[11]研究空气声学感应利用长波的衍射现象实现一种可以检测遮挡区域内待检目标的声波传感系统。试验结果表明,利用低频调制信号可以检测遮挡区域内的物体。信号频率越低,空间分辨率越差。在实际应用时,需要考虑发射信号的频率和空间分辨率等因素来选择信号。
Dvorak等[12]研究单个超声传感器对人畜、植物和栅栏杆等农业环境中常见物体的检测能力。试验过程中多次未探测到狗模型的存在,因为其蓬松的表面会吸收超声波,致使传感器难以接收到回波。另外干扰测试表明,超声波传感器面对视野范围内的多个物体,只会报告离其最近的对象。那么在复杂的农田环境中,如果作业人员身着质地柔软的衣物,超声波传感器的检测效果将大打折扣,而当出现作物及其他植被对行人存在遮挡的情况时,单独使用超声波传感器将无法完成检测。
综上可以看出,超声波技术目前只适用于相对简单、空旷的场景,在复杂的农田环境中如果出现行人和作物混杂在一起的情况,单独使用超声波技术几乎无法实现检测,将其与其他传感器检测技术结合使用是未来研究的趋势。
1.2 雷达检测技术
雷达检测的工作原理是通过向待检目标发射探测波,再将接收到的反射信号送至接收设备进行适当处理,获得目标位置、方向、速度等特征信息[13]。常用的雷达探测介质有激光、毫米波、超声波、红外线等,尤以属于电磁波的毫米波、激光为主。
毫米波雷达具有体积小、成本低、空间分辨率高的优点,而且不受光照条件的影响,还能穿透雨、雾、烟、灰尘等,常用于非结构化农田的动态障碍物的检测与跟踪。Pan等[14]利用毫米波雷达对动态目标进行检测跟踪,搭配可减少噪声的扩展卡尔曼滤波器,提升目标跟踪精度。Doerr等[15]采用毫米波雷达辅以激光雷达扫描仪,利用空间裁剪(Space clipping)检测算法消除作物或斜坡造成的數据点,通过对作物进行检测来间接得到人类、野生动物和其他农业设备等外来物体的存在。研究表明检测率和车辆速度、遮挡率之间存在负相关关系,较矮的目标在作物中几乎隐身,很难检测到。
相对于基于其他探测介质的雷达,三维激光雷达因为探测距离较远且精度高、受光照变化的影响小,而且可以对场景进行三维重建,近年来国内外基于三维激光雷达在农业领域的研究逐渐增多。张明宇等[16]在喷杆式喷雾机田间作业环境下利用三维激光雷达对障碍物的距离和高度进行检测。该研究只对静态障碍物进行了检测,无法检测动态障碍物或者突然出现的障碍物。另外该研究中使用的三维固态激光雷达无法给出障碍物的颜色、软硬度和厚度等信息。Kragh等[17]利用三维激光雷达扫描获取三维点云,然后通过使用支持向量机(Support Vector Machine,SVM)分类器,根据从局部邻域提取的特征将单个3D点分类为地面、植被或其他物体对象。试验表明,该方法对行人、牲畜、车辆和建筑物等物体的检测准确率为81.1%。三维激光雷达获得的信息直观且全面,但系统造价昂贵,目前仅存在于理论研究阶段。
基于雷达的检测技术能够很好地适应农业环境,尤其在雨、雪等特殊天气条件下有更多的应用优势。但雷达检测技术在面对存在遮挡的情况表现得并不出色,在实际农田应用中很难将隐藏在作物中的农田作业区行人有效检出并定位。
1.3 机器视觉检测技术
机器视觉,又称计算机视觉,是利用图像和图像序列来识别和认识三维世界,使其能够实现与人类眼睛类似的视觉功能。机器视觉根据检测范围可分为单目视觉、双目视觉和全景视觉[18]。本文中主要讨论以RGB相机为采集设备的视觉检测技术。
近年来不少学者对机器视觉在农田场景中的应用开展研究,例如张磊等[19]采用2个平行放置的摄像机形成立体视觉对农田中的障碍物进行检测,魏建胜等[20]搭建双目视觉障碍物感知系统利用深度卷积神经网络(Convolutional Neural Network,CNN)对农田作业区中的障碍物进行检测,都具有不错的检测效果。基于双目立体视觉的行人检测系统覆盖的视野范围较宽,能够基于视差原理重建物体三维轮廓及位置,在一定程度上解决了局部遮挡问题[21]。与之相比,全景视觉具有更大的视场,可以获得360°的农机周围图像。Xu等[18]基于全景摄像机对农业机械周围的动态障碍物进行快速检测,结果显示行人检测正确率为81.61%,整体正确率为82.93%。上述利用机器视觉进行农田障碍物的检测虽然搭建在农业车辆上,但只在室外空旷环境下进行研究测试,几乎不考虑遮挡情况。
Wei等[22]模拟人脑的识别功能,利用双目视觉系统在农田中获取图像,从图片中获取色彩、亮度等基本信息以及场景的深度分布信息,然后通过抑制待检目标附近区域的背景影响,最后根据深度显著图的显著性信息实现识别前后被遮挡的行人。韩永华等[23]采用Haar小波多分辨率分解,利用非作物与作物之间的频率及分布差异,标出疑似障碍物区域,再通过对其进行频率分层等操作,判断是否存在障碍物。其中采集的农田图像来自菜地、各个时期的麦田和生长期水稻田等,试验表明包括土堆、石头等静态障碍物和人、其他作业机械等动态障碍物都可有效检出,识别准确率达100%。
以RGB相机为代表的可视化技术,以低成本和高信息量为优势,随着图像处理技术的快速发展,机器视觉技术会在目标检测领域得到更多的应用。从上述的应用情况可以看出,除了硬件安装位置和数量带来的视野宽度不同外,其他方面大多大同小异,区别是后续使用的处理算法的不同。
1.4 热成像检测技术
红外热成像技术属于被动传感器,其本身并不发出探测波,而是通过吸收目标物体辐射的红外线电磁波,再经过光电转换、信号处理,将肉眼不可见的红外辐射转换为可视热像图或视频[2426]。红外热成像技术使人类突破视觉局限,可以“看到”物体表面的温度分布状况[27]。
红外热成像设备最初是作为军用夜视侦查工具开发的,但随着成本下降,使其能够更广泛地应用于民用领域,近年来在行人检测领域的应用研究也不断增多[28]。Yeom[29]利用无人机采集的红外热视频对人体进行检测和跟踪。当无人机飞行高度低于50m,以冬季夜晚的平坦路面和山区为背景拍摄时,平均检出率为91.6%,当飞行高度达到100m,以夏季白天的停车场为背景,复杂的背景加上远距离拍摄造成的小目标,使得平均检出率只有79.8%。在一定程度上说明,红外热成像技术在环境温度相对较低的冬季夜晚工作优势明显。Steen等[30]利用热成像技术结合数字图像处理算法形成的系统,对草原栖息地中的野鸡和野兔进行模拟检测。结果表明,在大多数情况下,检出率接近100%,尽管密集的作物可能会妨碍动物的检出率。在割草作业中高草对于小型野生动物的遮挡程度不亚于农机作业中作物对于行人的遮挡,说明红外热成像技术应用于存在遮挡的行人检测场景中有很大的前景。
Christiansen等[31]通过搭建多传感器平台,对以站立或躺倒的姿态出现在行进轨迹上的行人进行检测,其中高草对不同姿态的成人或儿童呈现不同程度的遮挡,通过试验给出了用于检测的不同传感器模式的初步评估。其中热感摄像机在测试中显示了巨大的能力,因为它能够利用温度信息检测到高草中的行人,而不管人体姿态如何。然而,当气温升高,生物的热信号变得模糊,检测结果便不太理想。
人类作为恒温动物,几乎不受环境温度的影响而保持恒定体温的特性,使其很容易在热像图的环境背景中脱颖而出。在行人检测领域,热感相机相比普通相机可能是更好的选择。
1.5 多传感器融合检测技术
每一个单一的目标检测技术都有各自的限制,多传感器系统集成的技术特点是目标信息的互补性[32]。随着城市自动驾驶与农业机械自主作业的不断推进,多传感器组合平台将成为实时检测系统的主流趋势。
1.5.1 机器视觉与雷达的技术结合
目前国内比较成熟且使用广泛的是雷达和机器视觉融合技术。视觉与非视觉传感器的结合,也将提高目标检测的准确性,因而實现较理想的避障效果[33]。Wang等[34]利用毫米波雷达和机器视觉获得的空间信息生成感兴趣区域(Region of Interest,ROI),然后基于从中提取的雷达微多普勒特征和图像特征融合来实现目标分类。试验结果表明,该系统具有良好的检测和分类性能。薛金林等[35]利用激光雷达获取障碍物坐标作为先验性信息,同时通过单目机器视觉获取的图像信息进行显著检测,然后基于区域生长法对显著图完成障碍物分割。上述研究表明机器视觉与二维雷达技术的感知数据融合,不仅可以在距离、深度方面实现互补,还能结合视觉获取障碍物的轮廓信息和雷达获得的位置信息准确快速地完成检测。
对于果园自动化作业拖拉机,固定的障碍物可以通过路径规划来规避,但是可移动的障碍物只能通过实时感知系统检测并避开。Moorehead等[36]搭建由雷达和摄像头组成的感知系统来探测障碍物,该感知系统利用基于几何形状的检测器和基于外观的分类器来感知识别潜在的障碍。几何探测器在果园的开阔区域能够大展拳脚,但在靠近果树的区域无法将站在果树旁的人从茂盛的树叶中区分出来,而外观分类器可以利用纹理和颜色特征信息正确地识别出行人并标记为不可通过区域。不过在杂草阻碍视线或者光照极差的情况下,系统便只能停止拖拉机,并向远程监控人员发出信号以确定是否能通行。
1.5.2 其他形式的技术结合
随着技术的发展和设备的更新,国内外研究人员也积极引入新型装置以建立新的融合检测平台,这为在农田场景中实现环境感知提供了更多可能性。Benet等[37]利用TOF相机(Time of Flight Cameras)与RGB相机形成新型双目视觉系统,对割草机前方的待测物体(草、木、枝)进行识别分类,完成穿越操作。TOF相机可以在光照变化的条件下进行三维几何测量,再搭配RGB相机,便能够实现对前方的待检目标的比色和几何测量。在其试验设定中,树枝或树木等其他物体被认为是障碍物,而同样对行车视线存在一定遮挡的草类则是可穿越的对象。从结果分析可以看出,割草机在该方法的辅助下可避开检测到的其他物体。但本试验并未安排对动态障碍物的检测,所以是否能够通过该方法来实现遮挡行人的检测还有待商榷。Reina等[38]利用HDR立体视觉和热成像融合,并在后期处理算法中将色度权重归零,高度和温度的权重设置为相等,可以很好地检测出各类田间障碍。立体视觉和热成像技术的融合可以提供强大的环境感知能力,不是空旷的视野才能被认定为可通过的,可以更好地满足农机作业要求。另外特定的目标可被分配更高的优先级,比如人类,以便更好地实现行人检测,降低伤人风险。缺点是探测距离不够远,无法给大型农机避障提供足够的反应时间。
近年来随着各类传感器的成本降低和融合处理技术的快速发展,国内外研究学者都不再拘泥于使用单一传感器进行检测,不仅视觉技术与激光雷达、超声波的传统融合技术越发成熟,而且随着新的仪器设备的引入,不断有新的技术融合系统出现。但是设备的成本、系统的稳定性仍是多传感器集成系统在农田场景实际应用前亟待解决的问题。
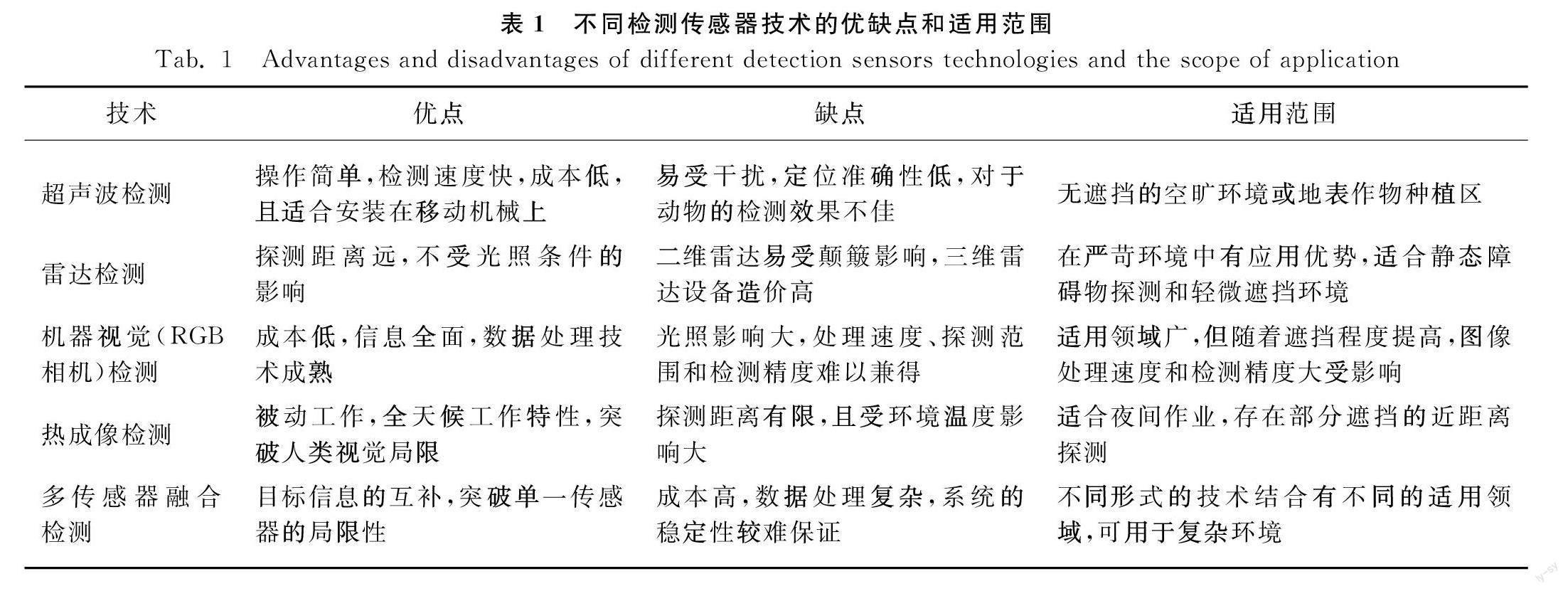
不同检测传感器技术各有优缺点,对于遮挡情况的处理程度也各不相同。如表1所示,本文对各类传感器技术的优缺点和适用范围进行对比总结。
2 遮挡情况下行人检测算法
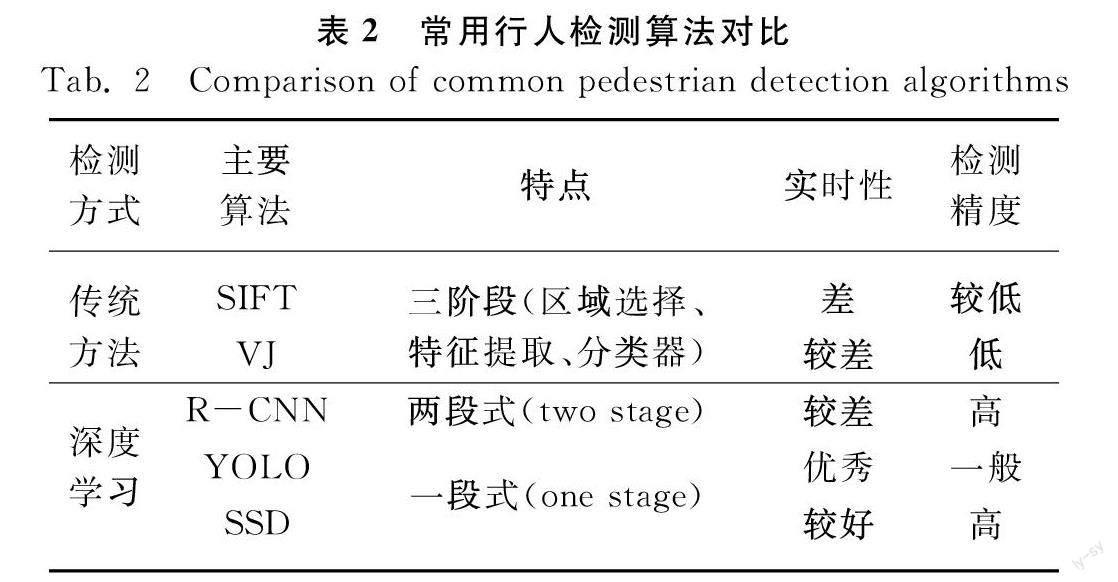
基于机器视觉得到的图像和视频通过特定的行人检测算法可以对遮挡情况进行处理优化以便后续分析研究。行人检测算法主要分为两类如表2所示,传统的行人检测算法通过滑动窗口遍历得到候选区域,经由人工提取行人特征,训练得到分类器,利用训练好的分类器对扫描窗口进行区域分类并输出目标检测的结果,经典算法如HOG+SVM、Haar+Adaboost等;深度学习算法是通过自主地学习大量的训练数据提取图像内部层级特征的一类神经网络算法,代表算法有CNN、YOLO、SSD等[3940]。
2.1 传统机器学习行人检测算法
对于遮挡情况下行人检测,传统机器学习目标检测算法主要有以下两种思路[41]。一是通过处理分析被测目标的特征信息,利用未被遮挡部分推测行人位置。Chen等[42]提出一种双圆形窗口描述符,可以更好地区分头部与非头部,实现人员精准定位。廖畅等[43]利用TOF相机在俯视角度下获取的深度图像,通过注水算法寻找潜在头部所在的局部最大区域,进而完成行人检测。在高秆作物收获等高遮挡的农业场景中隐形行人探测问题,将传感器平台安放于离地较高的位置有利于提升检测宽度和距离,那么在俯视角度下头部相对于人体其他部位是更好的检测目标。可以预见,行人头部检测方法可以在该领域中得到更多的应用。二是从遮挡物的角度出发,训练特定分类器,尽可能地降低遮挡的影响来获得行人位置。西班牙的Campos等[44]设计了一个三类支持向量机分类器来识别植物(玉米植株和杂草)、土壤和玉米地中的其他物体目标,特别是行人目标。支持向量机[45]是由Cortes和Vapnik在1995年提出的一种机器学习分类方法,不同的特征信息在分析和比较后将被作为分类器的描述符得以利用,与其他分类器相比降低了小样本模型学习的难度,具有运算速度快且分类准确的特点。通过对单目彩色相机获取的图像进行处理验证,采用三类SVM分类器进行目标识别,准确率可达94.3%。
2.2 基于深度学习的行人检测算法
相较于费时费力的人工提取特征法,基于深度学习的目标检测算法在执行效率、检测精度上优势明显,所以用其来处理遮挡情况的研究不断增加,但真正将此技术运用到农田场景中的还是少数。蒋浩[46]通过在玉米地、大豆地、小麦地中采集的测试集样本,利用深度学习完成不同姿态的行人在部分遮挡的农田环境中的检测,并通过设置不同的待检目标安放距离来测试模型的检测精度,分别确定了一种适用于移动端和云端障碍物检测平台的模型。李文涛等[8]以YOLOv3-tiny (You only look once version 3 tiny)为基础框架,采用混合注意力机制中的多个模块达到弱化背景强化目标,缓解了背景干扰和植被遮挡导致的目标漏检问题,使其能够满足农机作业正常行进速度下对田间行人和农机障碍物实时检测的需求。
相对于其他户外场景,果园中有丛生的杂草、茂密的树叶以及高大的果树,使得对果园中的人进行检测更具挑战性。崔学智等[47]利用轻量级神经网络对葡萄园田间障碍进行快速检测,其中YOLOV3-tiny在既保证高精度的同时检测速度又能达到最快,但资源占用较高。刘慧等[48]通过对单次多重检测器(Singleshot multibox detector,SSD)模型进行改进优化,使其能够更好地对不同运动状态、不同姿态和远近程度不同的果园行人进行检测,但并未考虑遮挡问题的影响。Pezzementi等[49]利用在拖拉机顶部安装的摄像头采集不同姿态、不同程度遮挡的田间行人数据集,再利用用于城市行人检测的三种CNN算法和一种改进算法对获得的数据集进行处理,并对结果进行评估比较。结果显示改进算法相比其他三种CNN算法检测效果更好,说明即使在城市场景中已相对成熟的检测算法也不能直接在户外领域中应用。正如预期的那样,检测率随着遮挡程度的增加而下降,以至于在重度遮挡情况下显著下降。特别地,以一定速率在果园中移动的人相对于站立不动的人更容易被检测到。
近年来由于图像处理相关理论的快速发展及计算能力的提升,各类行人检测算法在处理遮挡情况上都取得了较大的突破[48]。在自动驾驶产业蓬勃发展的带动下,基于结构化道路环境的行人检测研究成为热点,也使得在这一领域的算法的更新优化和行人数据库的建立足够快。虽然人的外观在城市和户外农田环境中不会变化很大,但两者周围环境的外观特征有明显差异,会在一定程度上影响算法的辨别力和定位能力。另外对于遮挡情况,在城市环境中行人之间互相遮挡是主要的问题,而由于农田作业环境的特殊性,人员密集程度较低,遮挡情况主要发生在作物、杂草等其他对象对待检行人的遮挡。这也使得来自城市领域的算法和数据集很难直接应用于户外农田场景的检测中。
3 存在问题
针对农田环境中各类障碍物的检测的研究不在少数,但目前很多研究都只适用于简单、空旷环境,而并未考虑農业机械穿越作业区时作物、其他作业机械等非障碍物对待检目标的遮挡。国外一些学者尝试在高草农场、果园和玉米田等场景中开展相关试验研究,不过仅存在于理论阶段,而国内对这个领域的研究还比较少,有待扩充。整体来说,近年来行人检测技术的检测速度和准确度都有很大提高,但是目前针对非结构化的农田作业区的感知技术还需加强,尚有诸多问题亟待解决。
3.1 单一传感器存在应用局限
不同传感器技术存在各自的特性,对于遮挡问题的处理能力和在农田环境的适用性也不同。超声波传感器探测速度快、成本低,但检测效果受物体表面类型影响大,另外由于超声波对于多物体出现在视野内只报告近者,使其很难应用于存在遮挡的农田环境中进行行人检测。雷达探测距离远且受环境光变化的影响小,但获得的信息较为单一,单独使用时具有一定局限,不过搭配SVM分类器使用,可以处理一定程度的遮挡问题。机器视觉设备成本低、安装加工灵活、适用性广,但在数据处理上相对复杂,且受环境因素影响严重,农田环境中的光照变化和雨雾等天气条件会对其产生较大影响。热感成像技术可以帮助人类超越视觉局限,但探测距离有限,且受环境温度影响大,不过对于存在遮挡的人畜检测问题,热成像设备目前仍是该研究领域最佳的设备选择。
3.2 多传感器融合技术研究不够深入
如今国内外学者对于多传感器融合在农业环境的应用研究逐渐增多,但想要解决存在遮挡情况的农田环境中的行人检测问题,还需要更多的新的角度而不能只依靠简单的设备组合。目前关于多传感器技术结合方法的应用研究还不深入,大部分结合形式仍处于模拟试验阶段,另外加入新型设备的融合技术的稳定性问题仍需更多的尝试和探索。
3.3 检测算法对遮挡情况的处理优化效果有限
遮挡下的行人检测算法可以对遮挡情况进行处理优化,但只能起到画龙点睛的作用,面对严重遮挡的情况更是束手无策。另外,深度学习算法的检测效果要视目标与训练集相关程度而定,但目前针对农业环境的行人数据库有限,导致研究人员在模型训练阶段需要花费大量时间和精力自行扩充训练集。
4 展望
农業环境与城市驾驶环境有许多不同,即使城市行人检测技术在越发成熟的城市规划带动下迅速进步,但在复杂的农田环境中想要实现行人检测对其只能借鉴,不能照搬,尤其两个领域在算法方面由于侧重点大不同,需要具体问题具体分析,也需要更多针对农田场景的技术改进与创新。
4.1 采集信息的立体化和多样化
随着计算机计算力、数据处理能力的增强,可以在未来的研究中更多地加入深度、立体信息,例如引入TOF相机,它能够提供场景各点的深度信息,有助于判断待检目标的形貌、距离等。再比如Kinect传感器,它不仅可以通过RGB视觉传感器获取彩色图像,还可以利用两侧的红外传感器获取景深数据和红外数据,对农田场景进行三维重建。
4.2 无人机辅助避障
相比利用传统车载平台搭载传感器进行运动目标检测,考虑使用农用无人机携带检测设备保持与作业农机以相同的速率下前进,并在正前方获取图像等信息,不仅可以有更多的数据处理时间以及农机避障反应时间,而且可以削弱水平视角下作物的遮挡问题。
4.3 建立完整环境感知系统
本文主要针对田间行人的检测,但是对于农田作业安全,对静态障碍物、困难地形以及牲畜、其他农业设备等农田中的移动障碍的检测也是必不可忽略的。另外对于农田环境的认识研究仍需进一步深入,包括行人在内的障碍物的检测定位只是其中一环,对于搭建真正完整的系统尚需路径规划、车辆控制和避障策略的制定等部分。
参 考 文 献
[1] 李翠妮, 葛晶, 赵沙俊一. 人工智能、老龄化与经济高质量发展[J]. 当代经济科学, 2022, 44(1): 77-91.
[2] 芮挺, 费建超, 周遊, 等. 基于深度卷积神经网络的行人检测[J]. 计算机工程与应用, 2016, 52(13): 162-166.
Rui Ting, Fei Jianchao, Zhou You, et al. Pedestrian detection based on deep convolutional neural network [J]. Computer Engineering and Applications, 2016, 52(13): 162-166.
[3] Benenson R, Omran M, Hosang J, et al. Ten years of pedestrian detection, what have we learned? [C]. European Conference on Computer Vision. Springer, Cham, 2014: 613-627.
[4] Xiao Y, Zhou K, Cui G, et al. Deep learning for occluded and multiscale pedestrian detection: A review [J]. IET Image Processing, 2021, 15(2): 286-301.
[5] Tabor T, Pezzementi Z, Vallespi C, et al. People in the weeds: Pedestrian detection goes off-road [C]. 2015 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). IEEE, 2015: 1-7.
[6] 郭烈, 王荣本, 顾柏园, 等. 世界智能车辆行人检测技术综述[J]. 公路交通科技, 2005(11): 137-141.
Guo Lie, Wang Rongben, Gu Baiyuan, et al. Overview of worldwide intelligent vehicle pedestrian detection technology [J]. Journal of Highway and Transportation Research and Development, 2005(11): 137-141.
[7] 罗锡文, 廖娟, 胡炼, 等. 我国智能农机的研究进展与无人农场的实践[J]. 华南农业大学学报, 2021, 42(6): 8-17, 5.
Luo Xiwen, Liao Juan, Hu Lian, et al. Research progress of intelligent agricultural machinery and practice of unmanned farm in China [J]. Journal of South China Agricultural University, 2021, 42(6): 8-17, 5.
[8] 李文涛, 张岩, 莫锦秋, 等. 基于改进YOLOv3-tiny的田间行人与农机障碍物检测[J]. 农业机械学报, 2020, 51(S1): 1-8, 33.
Li Wentao, Zhang Yan, Mo Jinqiu, et al. Detection of pedestrian and agricultural vehicles in field based on improved YOLOv3-tiny [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 1-8, 33.
[9] Guo L, Zhang Q, Han S. Agricultural machinery safety alert system using ultrasonic sensors [J]. Journal of Agricultural Safety and Health, 2002, 8(4): 385-96.
[10] 何勇, 蔣浩, 方慧, 等.车辆智能障碍物检测方法及其农业应用研究进展[J]. 农业工程学报, 2018, 34(9): 21-32.
He Yong, Jiang Hao, Fang Hui, et al. Research progress of intelligent obstacle detection methods of vehicles and their application on agriculture [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(9): 21-32.
[11] Koyama S, Okubo K, Tagawa N. Performance comparison of signal coding method in acoustic sensing for occlusion area using super-directional sound source [C]. 2019 IEEE International Ultrasonics Symposium (IUS). IEEE, 2019: 603-606.
[12] Dvorak J S, Stone M L, Self K P. Object detection for agricultural and construction environments using an ultrasonic sensor [J]. Journal of Agricultural Safety and Health, 2016, 22(2): 107-119.
[13] 李洋. 智能车辆障碍物检测技术综述[J]. 大众科技, 2019, 21(6): 65-68.
Li Yang. Overview of obstacle detection technology for intelligent vehicles [J]. Popular Science & Technology, 2019, 21(6): 65-68.
[14] Pan S, Xie Y, Chen K, et al. Obstacle tracking based on the extended kalman filter and millimeter-wave radar [C]. 2022 7th International Conference on Intelligent Computing and Signal Processing (ICSP). IEEE, 2022: 1770-1775.
[15] Doerr Z J L, Lagu C. Evaluating the ability to detect foreign objects in crops using laser range scanners mounted on agricultural vehicles [C]. 2009 Reno, Nevada, June 21-June 24, 2009. American Society of Agricultural and Biological Engineers, 2009: 1.
[16] 张明宇, 齐瑞锋, 王强, 等. 喷杆机械臂障碍物检测系统设计与性能测试[J]. 中国农业信息, 2021, 33(2): 49-56.
Zhang Mingyu, Qi Ruifeng, Wang Qiang, et al. Design and performance test of obstacle detection system for boom manipulator [J]. China Agricultural Informatics, 2021, 33(2): 49-56.
[17] Kragh M, Jrgensen R N, Pedersen H. Object detection and terrain classification in agricultural fields using 3D lidar data [C]. International Conference on Computer Vision Systems. Springer, Cham, 2015: 188-197.
[18] Xu H, Li S, Ji Y, et al. Dynamic obstacle detection based on panoramic vision in the moving state of agricultural machineries [J]. Computers and Electronics in Agriculture, 2021, 184.
[19] 張磊, 王书茂, 陈兵旗, 等. 基于双目视觉的农田障碍物检测[J]. 中国农业大学学报, 2007(4): 70-74.
Zhang Lei, Wang Shumao, Chen Bingqi, et al. Detection of obstacles in farmland based on binocular vision [J]. Journal of China Agricultural University, 2007(4): 70-74.
[20] 魏建胜, 潘树国, 田光兆, 等. 农业车辆双目视觉障碍物感知系统设计与试验[J]. 农业工程学报, 2021, 37(9): 55-63.
Wei Jiansheng, Pan Shuguo, Tian Guangzhao, et al. Design and experiments of the binocular visual obstacle perception system for agricultural vehicles [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(9): 55-63.
[21] 吴迪. 基于红外图像的行人检测算法研究[D]. 西安: 中国科学院大学(中国科学院西安光学精密机械研究所), 2017.
Wu Di. Research on the algorithm of pedestrian detection based on infrared images [D]. Xian: Xian Institute of Optics & Precision Mechanics, Chinese Academy of Sciences, 2017.
[22] Wei W, Cheng L, Xia Y, et al. Occluded pedestrian detection based on depth vision significance in biomimetic binocular [J]. IEEE Sensors Journal, 2019, 19(23): 11469-11474.
[23] 韩永华, 汪亚明, 康锋, 等. 基于小波多分辨率分解的农田障碍物检测[J]. 农业机械学报, 2013, 44(6): 215-221.
Han Yonghua, Wang Yaming, Kang Feng, et al. Detection of obstacles in farmland based on wavelet multi-resolution transform [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 215-221.
[24] Gade R, Moeslund T B. Thermal cameras and applications: A survey [J]. Machine Vision and Applications, 2014, 25(1): 245-262.
[25] 孙晓刚, 李云红. 红外热像仪测温技术发展综述[J]. 激光与红外, 2008(2): 101-104.
Sun Xiaogang, Li Yunhong. Review of the development of temperature measurement technology with infrared thermal imager [J]. Laser & Infrared, 2008(2): 101-104.
[26] 伍利兵, 陈朝方, 林国生, 等. 红外热成像技术在安全检测领域的应用现状[J]. 品牌与标准化, 2021(4): 97-100.
Wu Libing, Chen Chaofang, Lin Guosheng, et al. Application status of infrared thermal imaging technology in the field of safety inspection [J]. Brand & Standardization, 2021(4): 97-100.
[27] 邓连军, 王冲, 雷克辉, 等. 红外热成像扫描技术在原油储罐油泥测量中的应用[J]. 清洗世界, 2020(6): 15-16, 52.
[28] 陈红强. 非接触式红外热成像测温技术探析[J]. 中国安全防范技术与应用, 2020(4): 14-18.
[29] Yeom S. Moving people tracking and false track removing with infrared thermal imaging by a multirotor [J]. Drones, 2021, 5(3): 65.
[30] Steen K A, Villa-Henriksen A, Therkildsen O R, et al. Automatic detection of animals in mowing operations using thermal cameras [J]. Sensors, 2012, 12(6): 7587-7597.
[31] Christiansen P, Kragh M, Steen K A, et al. Platform for evaluating sensors and human detection in autonomous mowing operations [J]. Precision Agriculture, 2017, 18(3): 350-365.
[32] 孔微雨. 基于多源信息的拖拉机安全预警及避障系统研究[D]. 西北农林科技大学, 2021.
Kong Weiyu. Safety warning and obstacles avoidance system of tractor using multi-information [D]. Northwest A & F University, 2021.
[33] 兰玉彬, 王林琳, 张亚莉. 农用无人机避障技术的应用现状及展望[J]. 农业工程学报, 2018, 34(9): 104-113.
Lan Yubin, Wang Linlin, Zhang Yali. Application and prospect on obstacle avoidance technology for agricultural UAV [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(9): 104-113.
[34] Wang Z, Miao X, Huang Z, et al. Research of target detection and classification techniques using millimeter-wave radar and vision sensors [J]. Remote Sensing, 2021, 13(6): 1064.
[35] 薛金林, 董淑嫻, 范博文. 基于信息融合的农业自主车辆障碍物检测方法[J]. 农业机械学报, 2018, 49(S1): 29-34.
Xue Jinlin, Dong Shuxian, Fan Bowen. Detection of obstacles based on information fusion for autonomous agricultural vehicles [J].Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 29-34.
[36] Moorehead S J, Wellington C K, Gilmore B J, et al. Automating orchards: A system of autonomous tractors for orchard maintenance [C]. Proceedings of the IEEE international conference of intelligent robots and systems, workshop on agricultural robotics, 2012.
[37] Benet B, Rousseau V, Lenain R. Fusion between a color camera and a TOF camera to improve traversability of agricultural vehicles [C]. Conférence CIGR-AGENG 2016. The 6th International Workshop Applications of Computer Image Analysis and Spectroscopy in Agriculture. 2016: 8.
[38] Reina G, Milella A, Rouveure R, et al. Ambient awareness for agricultural robotic vehicles [J]. Biosystems Engineering, 2016, 146: 114-132.
[39] 李柯泉, 陈燕, 刘佳晨, 等. 基于深度学习的目标检测算法综述[J]. 计算机工程, 2022, 48(7): 1-12.
Li Kequan, Chen Yan, Liu Jiachen, et al. Survey of deep learning-based object detection algorithms [J]. Computer Engineering, 2022, 48(7): 1-12.
[40] 方路平, 何杭江, 周国民. 目标检测算法研究综述[J]. 计算机工程与应用, 2018, 54(13): 11-18, 33.
Fang Luping, He Hangjiang, Zhou Guomin. Research overview of object detection methods [J]. Computer Engineering and Applications, 2018, 54(13): 11-18, 33.
[41] 陈宁, 李梦璐, 袁皓, 等. 遮挡情形下的行人检测方法综述[J]. 计算机工程与应用, 2020, 56(16): 13-20.
Chen Ning, Li Menglu, Yuan Hao, et al. Review of pedestrian detection with occlusion [J]. Computer Engineering and Applications, 2020, 56(16): 13-20.
[42] Chen S, Bremond F, Nguyen H, et al. Exploring depth information for head detection with depth images [C]. 2016 13th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS). IEEE, 2016: 228-234.
[43] 廖畅, 马秀丽. 基于TOF相机的俯视行人检测[J]. 电子测量技术, 2019, 42(6): 104-108.
Liao Chang, Ma Xiuli. People detection under an overhead time-of-flight camera [J]. Electronic Measurement Technology, 2019, 42(6): 104-108.
[44] Campos Y, Sossa H, Pajares G. Comparative analysis of texture descriptors in maize fields with plants, soil and object discrimination [J]. Precision Agriculture, 2017, 18(5): 717-735.
[45] Cortes C, Vapnik V N. Support vector networks [J]. Machine Learning, 1995, 20(3): 273-297.
[46] 蔣浩. 基于RTK技术的农业机械自动导航系统研究[D]. 杭州: 浙江大学, 2019.
Jiang Hao. Research on automatic navigation system of agricultural machinery based on RTK technology [D]. Hangzhou: Zhejiang University, 2019.
[47] 崔学智, 冯全, 王书志, 等. 边缘设备上的葡萄园田间场景障碍检测[J]. 中国农机化学报, 2021, 42(9): 150-156.
Cui Xuezhi, Feng Quan, Wang Shuzhi, et al. Vineyard scene obstacle detection based on edge devices [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(9): 150-156.
[48] 刘慧, 张礼帅, 沈跃, 等. 基于改进SSD的果园行人实时检测方法[J]. 农业机械学报, 2019, 50(4): 29-35.
Liu Hui, Zhang Lishuai, Shen Yue, et al. Real-time pedestrian detection in orchard based on improved SSD [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 29-35.
[49] Pezzementi Z, Tabor T, Hu P, et al. Comparing apples and oranges: Off-road pedestrian detection on the national robotics engineering center agricultural person-detection dataset [J]. Journal of Field Robotics, 2018, 35(4): 545-563.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03 15:04:42
电子制作(2019年22期)2020-01-14 03:16:52
传媒评论(2019年5期)2019-08-30 03:50:18
时代英语·高一(2019年1期)2019-03-13 10:29:48
电子制作(2018年9期)2018-08-04 03:30:58
电脑知识与技术(2016年28期)2016-12-21 12:13:14
科技视界(2016年26期)2016-12-17 17:31:58
科教导刊(2016年25期)2016-11-15 17:53:37
软件工程(2016年8期)2016-10-25 15:55:22
科技视界(2016年20期)2016-09-29 11:11:40