
基于边缘检测及RBF神经网络的遥感图像帧特征动态识别技术
2023-08-03 02:06薛薇,张锋,凡静,王博,李娜
计算机测量与控制 2023年7期
薛 薇,张 锋,凡 静,王 博,李 娜
(1.西安交通大学城市学院 计算机系,西安 710018;2.西安交通大学 电气学院,西安 710049)
0 引言
边缘检测是计算机视觉与图像处理的交叉研究问题,其目的在于对数字图像中亮度发生明显变化的节点对象进行标注。一般来说,数字节点表现出的显著变化行为能够反映出图像属性的变化规律,且对于变化规律的定义并不局限于连续性、非连续性、场景变化等某一特定方向[1]。RBF神经网络中文全称为径向基函数神经网络模型,常保持三层前馈型连接模式,既可以用于对数据样本进行分类,也可以对函数表达式的取值结果进行逼近处理。相较于其他类型的人工神经网络体系,RBF神经网络的连接结构更加简单,能够在快速学习数据信息的同时,提升网络体系的泛化运行能力[2]。从某种程度来说,边缘检测思想与RBF神经网络的设计原则具有相似性,将二者结合能够精准提取目标对象中的隐藏信息,且在选择目标对象时,并不设置明确的取样条件。
遥感影像由卫星相片、航空像片两部分组成,特指能够记录地物电磁波水平的照片与胶片。能供计算机元件直接处理的遥感图像一定是数字图像,而通过摄影方式所获取的图像大多为模拟状态,因此在录入图像信息时,需借助扫描仪等设备对其进行模/数转换处理。为了提升遥感影像的分辨率,相关学者纷纷对遥感图像处理方法做出了研究。文献[3]提出少样本条件下基于生成对抗网络的遥感图像数据增强处理方法,通过全局决策的方式,对帧节点对象特征进行识别,再借助训练集单位,实施对目标信息的融合与检测处理。文献[4]提出基于偏好型支持向量机的遥感图像云检测技术,从灰度特征与纹理特征的角度着手,对遥感图像的帧特征信息进行识别,可以通过偏好训练的方式,确定节点对象所处位置,并实施针对性识别与处理。然而上述两种方法的应用并不足以解决分辨率超限的问题,因此达不到100%精准识别的目标。针对上述问题,设计基于边缘检测及RBF神经网络的遥感图像帧特征动态识别方法。
1 遥感图像边缘检测
遥感图像边缘检测的实现,需要根据微分算子取值,求解OTSU阈值,从而对边缘节点追踪参数进行精准计算,本章节将针对上述内容展开深入研究。
1.1 微分算子
微分算子从微分思想的角度,对遥感图像中帧特征参量的梯度水平进行描述,如果所采集到遥感图像具有数字图像的表现特征,那么只要保障微分算子求解结果按照灰度变化梯度规则进行排序,就可以实现对遥感图像帧特征对象的精准识别[5-6]。对于微分算子的求解需要以导向量系数为基础,具体计算式如下:
(1)

所谓微分就是指无限缩小,在识别遥感图像帧特征时,只有确保对象样本的取样空间足够小,才能够避免既定特征参量在单一识别区间内频繁出现,因此对于微分算子的计算,还要保障帧特征参量的取值空间小于数字化图像的最小分辨率条件[7]。设i1、i2表示两个随机选取的微分取样参数,且i1≠i2的不等式条件恒成立,δ表示帧特征对象在单一样本空间内的取样标准值,I表示遥感图像的帧特征定义结果,e、u表示两个不相等的帧特征对象梯度参数,联立式(1),可将遥感图像微分算子表达式定义为:
(2)
如果帧特征对象不存在于遥感图像边缘区域之内,那么微分算子的取值将与数字图像的灰度水平无关,故而为使微分算子表达式影响遥感图像的边缘检测结果,只能在同一边缘区域内对帧特征对象进行取样。
1.2 OTSU阈值
OTSU阈值就是在数据样本保持最大类间距情况下求解所得的方差结果,在识别遥感图像帧特征参数时,对于该项物理指标的求解,不要求数据样本的取值来源于同一个数值区间,所以即便是在边缘检测区域内,运算主机也可以根据OTSU阈值的取值结果,判断帧特征对象的数值变化情况[8-9]。由于微分算子只能反映出遥感图像的灰度变化规则,没有在非边界与非统一背景的情况下对帧特征参数的方差结果进行要求,所以在求解OTSU阈值时,还要将帧特征参数在非边界与非统一背景情况下的取值结果考虑在内。
非边界情况下的帧特征参数取值条件:
(3)
非统一背景情况下的帧特征参数取值条件:
(4)

联立式(2)~(4),推导OTSU阈值定义式如下:
(5)
式中,ΔQ表示边缘检测区域内遥感图像帧特征数据的取值总量,φ表示方差统计参数。OTSU阈值等于零表示实施遥感图像边缘检测的过程中,主机元件可以对帧特征参数进行无差别识别。
1.3 边缘节点追踪参数
节点追踪是一种动态搜索思想,对于遥感图像边缘区域的检测,采用节点追踪的方式对帧特征参量进行动态识别,既可以避免数据样本出现相互覆盖的情况,也能够实现对某一个或某一类样本对象的精准识别[10-11]。对于边缘节点追踪参数的计算涉及对帧特征参量覆盖率、数据样本利用价值的求解,具体计算式如下:
(6)

遥感图像边缘检测还要求数据样本取值的唯一性,因此在求解边缘节点追踪参数时,还要求帧特征参量覆盖率、数据样本利用价值的取值必须属于同一个样本区间[12]。设λ表示遥感图像帧特征参量在单位检测区域内的动态匹配系数,s表示实时追踪向量,D表示单位时间内的帧特征对象检测总量,联立式(6),可将边缘节点追踪参数计算结果表示为:
(7)
为在同一边缘区域内完成对遥感图像帧特征参量的取值,要求γ≠0、W≠0的不等式取值条件同时成立。
2 RBF神经网络识别模型
2.1 RBF神经网络机制
RBF神经网络机制是一个集成的数据处理结构,能够借助神经网络终端将已输入的遥感图像帧特征样本改写成指令执行文件,从而得到多样化的动态识别结果,以便于网络主机在实施边缘检测的过程中,能够较好解决分辨率超限的问题[13]。遥感图像分辨率超限是一个普遍存在的问题,对于网络主机而言,其在完成边缘检测时,如果能够利用RBF神经网络机制提取大量的帧特征参量,就可以在长、宽、高3个方向上对图像帧特征对象模型进行模拟,从而在精准识别特征参量的同时,控制分辨率指标的波动变化行为[14]。RBF神经网络机制的具体作用原理如图1所示。
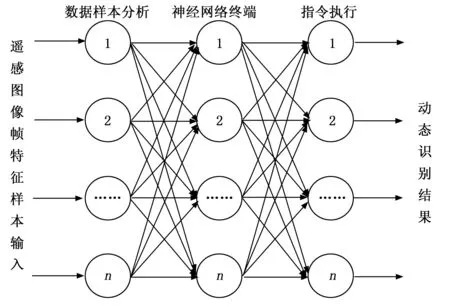
图1 RBF神经网络机制的作用原理
规定dmin表示遥感图像帧特征对象建模参数的最小取值,dmax表示建模参数的最大取值,且二者属于遥感图像的同一边缘检测区域,ι表示图像帧特征参量的神经性表达参数。在上述物理量的支持下,联立式(7),推导RBF神经网络机制作用表达式如式(8)所示。
(8)
神经网络终端不具备过滤数据样本信息的能力,所以网络主机在录入遥感图像帧特征样本时,必须过滤数据参量中的不合理信息。
2.2 神经性激活函数
激活函数在改变RBF神经网络中遥感图像帧特征参量的数学关系方面起到了关键影响作用。加入激活函数之前,前一神经网络阶层中遥感图像帧特征参量的取值直接影响后一网络阶层中特征参量的数值表达结果,所以图像帧特征参量在RBF神经网络机制中总是呈现相对混乱的表现状态[15-16]。加入激活函数之后,前一神经网络阶层中遥感图像帧特征参量被激活函数进行了映射定义,因此后一网络阶层中特征参量指标的取值总是呈现非线性状态,从某种程度来说,神经性激活函数具有非线性表达能力。设g表示前一神经网络阶层中遥感图像帧特征参量的函数赋值结果,f表示后一网络阶层中遥感图像帧特征参量的函数赋值结果,η表示图像帧特征参量在RBF神经网络中的传输效率,κ表示基于RBF神经网络机制的函数激活参数,联立式(8),推导神经性激活函数表达式如下:
(9)
RBF神经网络识别模型的构建除了影响网络主机对于遥感图像帧特征参量的边缘检测结果,还决定了样本参数的实际取值结果能否适应帧特征参量的动态识别条件。
3 遥感图像帧特征的动态识别
在边缘检测与RBF神经网络模型的作用下,为实现对遥感图像帧特征的动态识别,还应根据帧特征分割条件,确定超像素指标的取值范围,并联合动态合并条件,计算并行识别参量的具体数值结果。
3.1 帧特征分割
神经网络主机对于遥感图像帧特征的分割遵循如下处理流程:帧特征参量在网络体系中保持动态分布的排列形式,对于RBF神经网络模型而言,这种数据样本 分布方式便于边缘检测算法的实施,能够在保持帧特征参量样本特性的同时,使网络主机能够对其进行精准识别[17-18]。为避免分辨率超限问题的发生,神经网络主机在分割帧特征参量时还要遵循按需提取原则,且单一识别指令的执行只能得到帧特征参量的预分割处理结果。具体的分割处理执行步骤如图2所示。
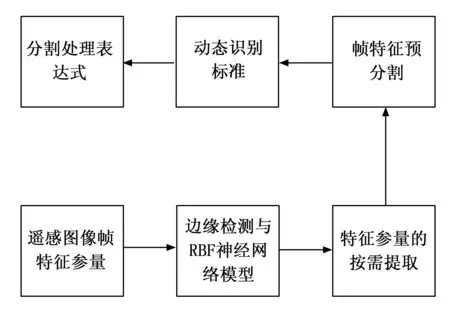
图2 遥感图像的帧特征分割步骤
联立式(9)所示的神经性激活函数,可将遥感图像的帧特征分割表达式定义为:
(10)

3.2 超像素指标

(11)
由于RBF神经网络在识别遥感图像帧特征时,只在边缘区域内对数据样本进行检测,所以为避免全局提取事件的发生,应在求解超像素指标之前,计算边缘区域内帧特征参量平均值的取值范围。
3.3 动态合并条件

(12)

3.4 并行识别参量

(13)
RBF神经网络对于遥感图像帧特征参量的边缘检测,不会对数据样本进行重复取样,因此网络主机运行所得到的帧特征参量动态识别结果具有唯一性。
4 实例分析
4.1 实验流程
为验证上文所设计识别方法的应用能力,设计如下对比实验。
1)在图1所示遥感图像中,提取一个面积为3 000 μm× 3 000 μm的像素区域作为实验用帧特征样本参量;
2)利用基于边缘检测及RBF神经网络的遥感图像帧特征动态识别技术,对所选实验区域内的帧特征样本进行识别,所得实验结果记为实验组变量;
3)利用少样本条件下基于生成对抗网络的遥感图像数据增强处理方法,对所选实验区域内的帧特征样本进行识别,所得实验结果记为A对照组变量;
4)利用基于偏好型支持向量机的遥感图像云检测技术对所选实验区域内的帧特征样本进行识别,所得实验结果记为B对照组变量;
5)统计所得变量数据,总结实验规律;
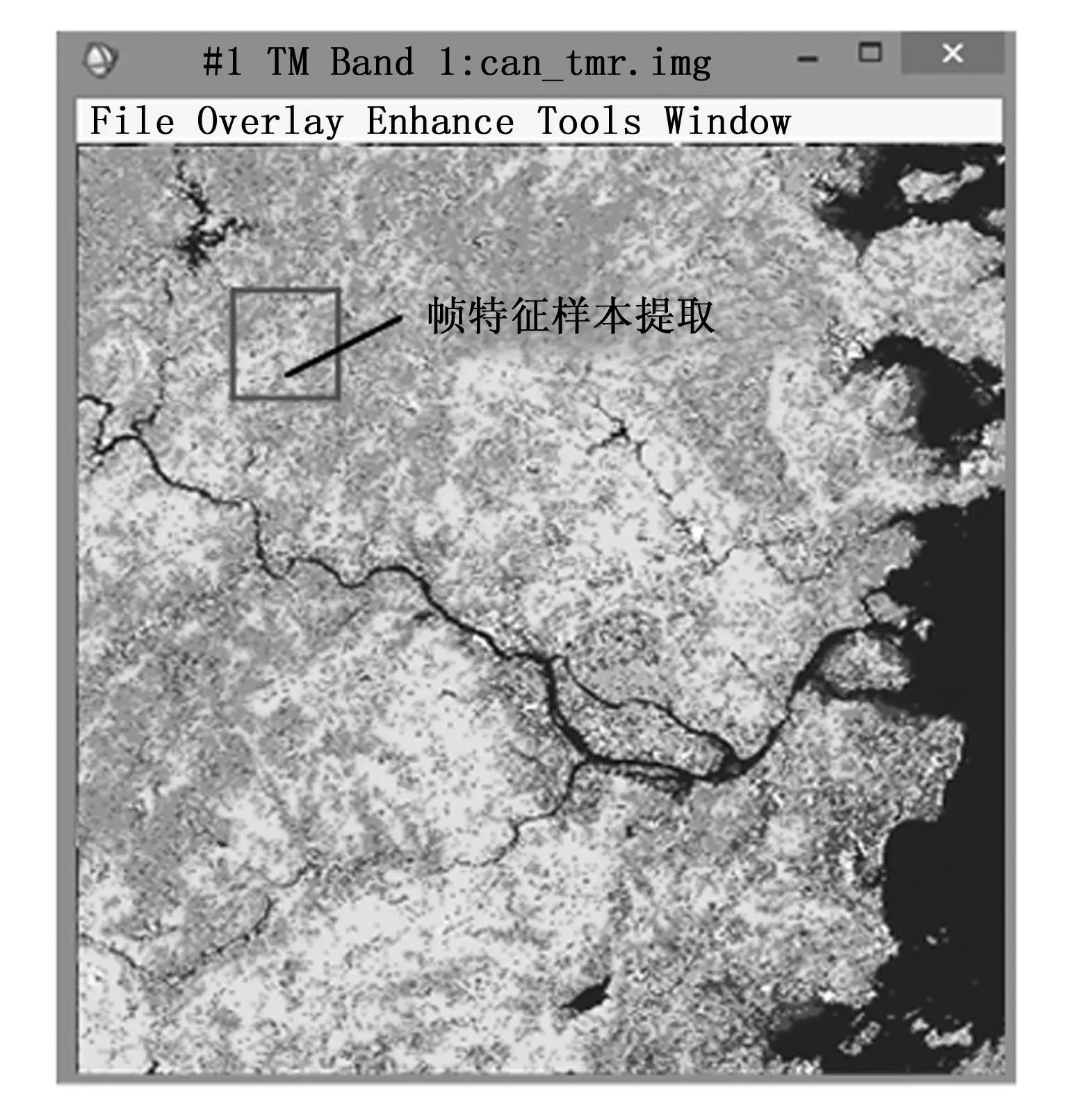
图3 遥感图像的帧特征样本提取
完成像素区域提取后,应对其进行无误差复制,以确保实验组、对照组所需识别的帧特征样本参量保持一致。
4.2 参数描述
分辨率超限是影响网络主机对于遥感图像识别能力的主要因素。在既定像素区域内,主机元件分别从长、宽、高3个方向对遥感图像进行识别,且3个方向上对于帧特征对象的识别精度都会影响分辨率超限问题的表现程度。由于分辨率超限是一种普遍存在的图像识别问题,所以只有在识别精度保持为100%的情况下(完全精准识别),才能够避免该问题的出现。
图4反映了本次实验过程中所定义的坐标轴方向及长、宽、高3个方向上对于帧特征对象的选取。
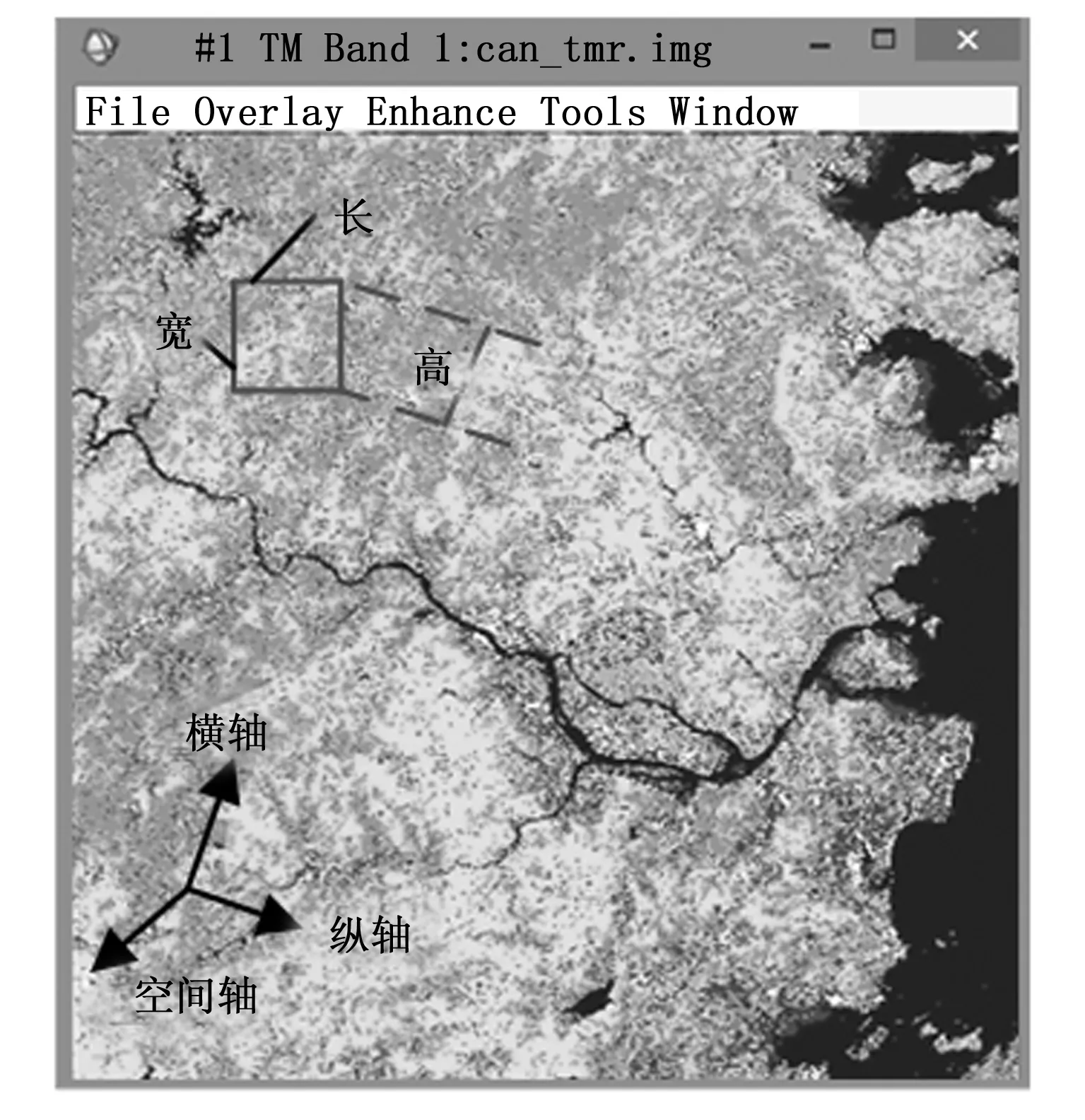
图4 识别方向定义
由于所选像素区域为正方形,且帧特征对象保持均匀分布状态,所以在识别过程中,每一方向上帧特征对象的取样长度都完全相等。
4.3 数据解析
每隔500 μm设置一个取样点,在包含两端零点的情况下,每一方向上设置7个取样点。由于实验过程中不会出现帧特征参量相互覆盖的情况,所以只需确定每一取样点处主机元件对于帧特征参量的识别位置是否与其真实位置保持一致,就可以判断出所选用方法对遥感图像帧特征参量的识别能力。
表1记录了主机元件对帧特征参量的具体识别结果。
分析表1可知,在整个实验过程中,实验组方法作用下,长、宽、高3个方向上遥感图像帧特征参量识别结果均与真实情况保持一致;A对照组方法作用下,第1、第2号取样点在长、宽、高3个方向上的遥感图像帧特征参量识别结果与真实情况保持一致,从第3个取样点开始,识别结果与真实情况出现了偏差;B对照组方法作用下,第1、第2、第3号取样点在长、宽、高3个方向上的遥感图像帧特征参量识别结果与真实情况保持一致,从第4个取样点开始,识别结果与真实情况出现了偏差。
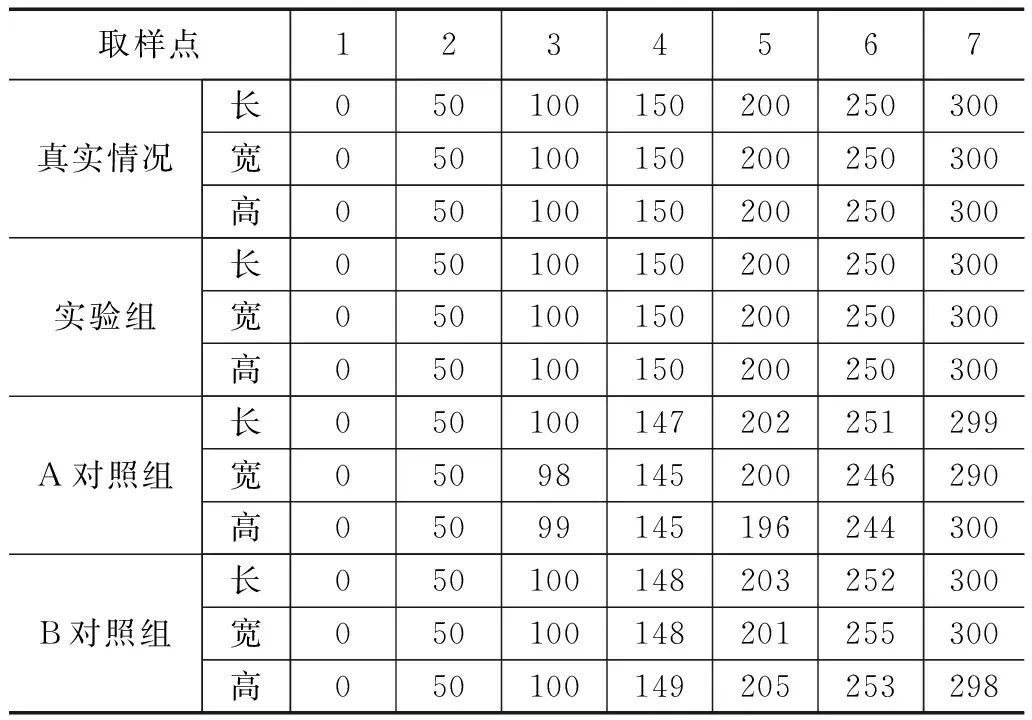
表1 遥感图像帧特征参量识别结果(单位:μm)
由于本次实验所选像素区域面积有限,所以在第7个取样点处,实验识别结果刚好等于或大于真实情况,识别结果都会与真实情况相等,因此第7个取样点处识别结果的参考价值相对较小。
综上可知:少样本条件下基于生成对抗网络的遥感图像数据增强处理方法、基于偏好型支持向量机的遥感图像云检测技术的应用,并不能保证长、宽、高3个方向的遥感图像识别结果均与真实情况保持一致,故而其对于分辨率超限问题的解决能力也就相对有限;基于边缘检测及RBF神经网络的遥感图像帧特征动态识别技术的应用,在长、宽、高3个方向上都可以实现对遥感图像的精准识别,这就表示该方法能够有效解决分辨率超限问题,符合精准识别遥感图像特征的实际应用需求。
5 结束语
遥感图像帧特征动态识别技术对于数据样本参量的识别借助RBF神经网络,并可以根据边缘检测结果,对微分算子与OTSU阈值进行计算,由于神经性激活函数可以同时约束帧特征分割表达式与超像素指标求解结果,所以边缘节点追踪参数始终与并行识别参量保持数值匹配关系。相较于其他类型的识别应用技术,这种新型算法的应用,在长、宽、高3个方向上都实现了对遥感图像帧特征对象的100%精准识别,分辨率超限问题能够得到较好解决,在实用性方面具有突出作用价值。
猜你喜欢
数学物理学报(2021年2期)2021-06-09
数学物理学报(2019年5期)2019-11-29
通信产业报(2016年44期)2017-03-13
广东技术师范大学学报(2016年5期)2016-08-22
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
物理实验(2015年9期)2015-02-28
数学年刊A辑(中文版)(2014年4期)2014-10-30
声学技术(2014年2期)2014-06-21
物理与工程(2011年1期)2011-03-25
雕塑(1999年2期)1999-06-28
