探究杠杆的平衡条件
2023-08-01 15:44舒爽
初中生学习指导·提升版 2023年7期
舒爽
[要点提炼]
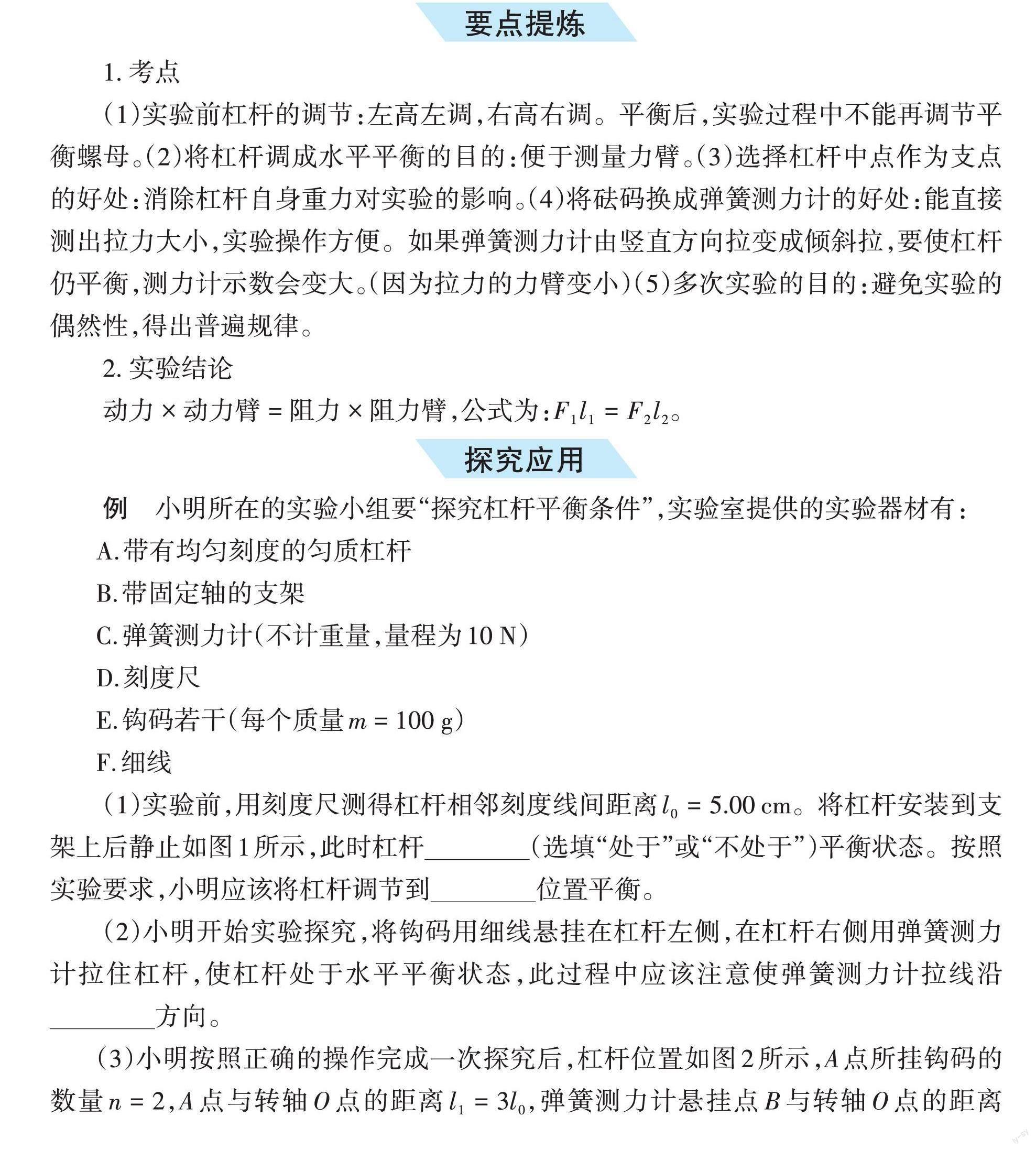
1. 考点
(1)实验前杠杆的调节:左高左调,右高右调。平衡后,实验过程中不能再调节平衡螺母。(2)将杠杆调成水平平衡的目的:便于测量力臂。(3)选择杠杆中点作为支点的好处:消除杠杆自身重力对实验的影响。(4)将砝码换成弹簧测力计的好处:能直接测出拉力大小,实验操作方便。如果彈簧测力计由竖直方向拉变成倾斜拉,要使杠杆仍平衡,测力计示数会变大。(因为拉力的力臂变小)(5)多次实验的目的:避免实验的偶然性,得出普遍规律。
2. 实验结论
动力 × 动力臂 = 阻力 × 阻力臂,公式为:[F1l1=F2l2]。
[探究应用]
例 小明所在的实验小组要“探究杠杆平衡条件”,实验室提供的实验器材有:
A.带有均匀刻度的匀质杠杆
B.带固定轴的支架
C.弹簧测力计(不计重量,量程为10 N)
D.刻度尺
E.钩码若干(每个质量m = 100 g)
F.细线
(1)实验前,用刻度尺测得杠杆相邻刻度线间距离[l0=5.00 cm]。将杠杆安装到支架上后静止如图1所示,此时杠杆(选填“处于”或“不处于”)平衡状态。按照实验要求,小明应该将杠杆调节到位置平衡。
(2)小明开始实验探究,将钩码用细线悬挂在杠杆左侧,在杠杆右侧用弹簧测力计拉住杠杆,使杠杆处于水平平衡状态,此过程中应该注意使弹簧测力计拉线沿方向。
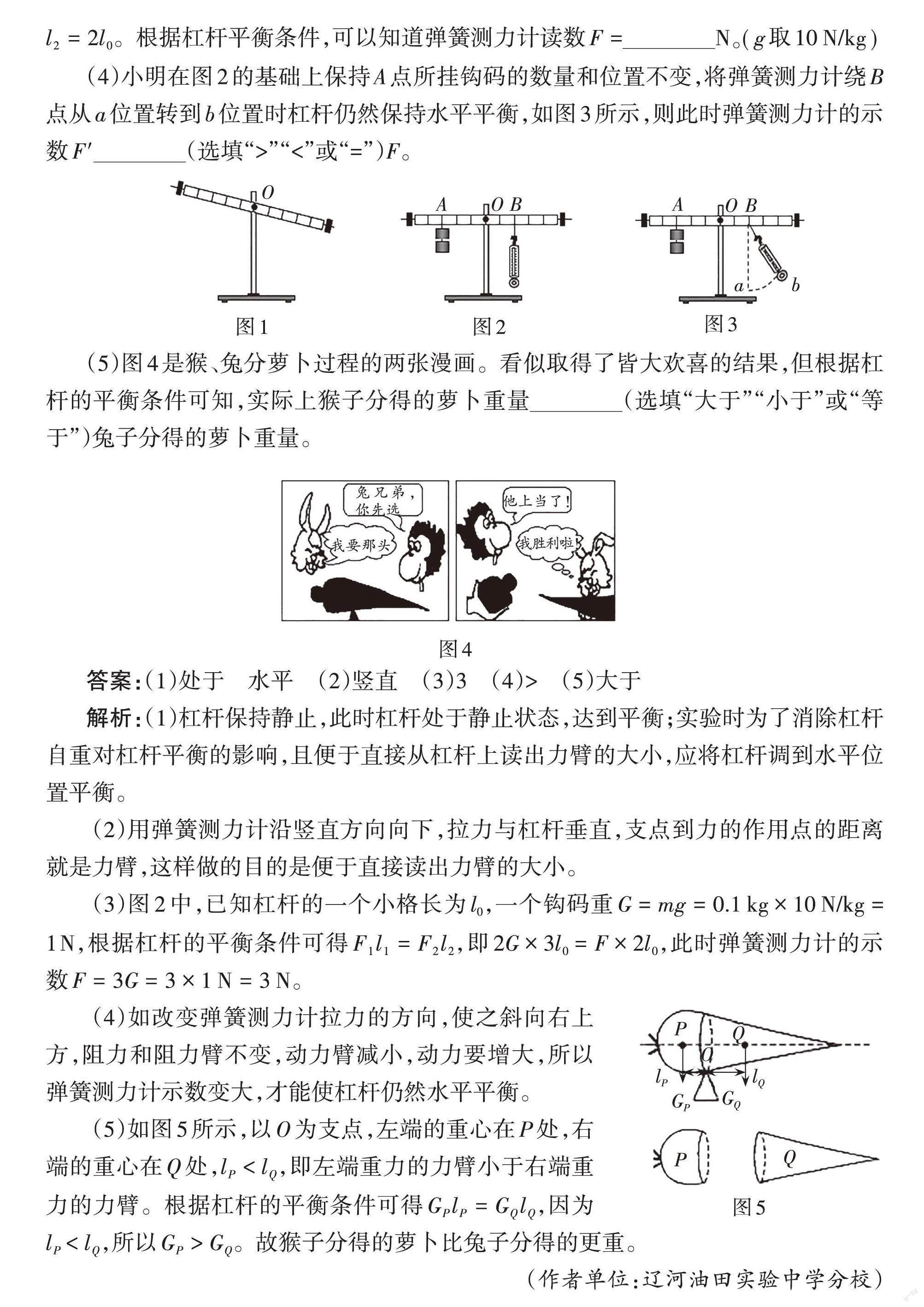
(3)小明按照正确的操作完成一次探究后,杠杆位置如图2所示,A点所挂钩码的数量[n=2],A点与转轴O点的距离[l1=3l0],弹簧测力计悬挂点[B]与转轴[O]点的距离[l2=2l0]。根据杠杆平衡条件,可以知道弹簧测力计读数[F=][N。(g]取[10 N/kg)]
(4)小明在图2的基础上保持[A]点所挂钩码的数量和位置不变,将弹簧测力计绕[B]点从[a]位置转到[b]位置时杠杆仍然保持水平平衡,如图3所示,则此时弹簧测力计的示数[F'](选填“[>]”“[<]”或“[=]”)F。
(5)图4是猴、兔分萝卜过程的两张漫画。看似取得了皆大欢喜的结果,但根据杠杆的平衡条件可知,实际上猴子分得的萝卜重量(选填“大于”“小于”或“等于”)兔子分得的萝卜重量。
答案:(1)处于 水平 (2)竖直 (3)3 (4)> (5)大于
解析:(1)杠杆保持静止,此时杠杆处于静止状态,达到平衡;实验时为了消除杠杆自重对杠杆平衡的影响,且便于直接从杠杆上读出力臂的大小,应将杠杆调到水平位置平衡。
(2)用弹簧测力计沿竖直方向向下,拉力与杠杆垂直,支点到力的作用点的距离就是力臂,这样做的目的是便于直接读出力臂的大小。
(3)图2中,已知杠杆的一个小格长为l0,一个钩码重[G=mg=0.1 kg×10 N/kg=1 N],根据杠杆的平衡条件可得[F1l1=F2l2],即[2G×3l0=F×2l0],此时弹簧测力计的示数[F=3G=3×1 N=3 N]。
(4)如改变弹簧测力计拉力的方向,使之斜向右上方,阻力和阻力臂不变,动力臂减小,动力要增大,所以弹簧测力计示数变大,才能使杠杆仍然水平平衡。
(5)如图5所示,以[O]为支点,左端的重心在[P]处,右端的重心在[Q]处,[lP
(作者单位:辽河油田实验中学分校)
猜你喜欢
农业装备与车辆工程(2022年4期)2022-10-31
理科考试研究·初中(2016年12期)2017-07-31
中学生数理化·教与学(2016年10期)2016-11-04
电测与仪表(2016年1期)2016-04-12
中学生数理化·高一版(2016年10期)2016-03-01
初中生天地(2015年36期)2015-12-26
新高考·高一物理(2015年7期)2015-09-21
数理化学习·高一二版(2009年7期)2009-11-23
物理教学探讨·初中学生版(2009年3期)2009-05-13