
无封装光纤光栅应变传感器校准系统研究
2023-07-31 10:30:06郑术力喻桂华郑文炜杨霖纪春阳
环境技术 2023年6期
郑术力,喻桂华,郑文炜,杨霖,纪春阳
(工业和信息化部电子第五研究所,广州 511370)
引言
FBG应变传感器作为一种新型无源传感器,具有结构简单、尺寸小、质量轻、抗电磁干扰能力强、耐腐蚀以及分布测量等优点,在土木工程、桥梁结构设计、轨道交通、石油化工、智慧制造、隧道施工、航空航天等领域的应变形变监测和检测中得到了广泛应用[1-2]。对应变传感器的性能测试及关键参数的校准是其运用于工程之前必不可少的步骤,而当前对FBG应变传感器,特别是无封装FBG应变传感器的校准研究相对较欠缺。
李慧鹏[3]等设计了一种由精度为1 μm的滑移台和比例为1∶200的杠杆组成的针对无封装FBG应变传感器的标定装置,其标定范围为(0~1 000)με。该方法对杠杆加工的精度要求较高,精确控制相对较困难。
曹敏[4]等利用万能试验机对封装的FBG应变传感器两端产生不同应力,使FBG应变传感器产生应变,从而实现对封装FBG应变传感器的标定。其标定线性度达到了99.72 %,性能良好,但该方法无法对未封装FBG应变传感器进行标定。
郑文昊[5]等利用等强度梁的原理,设计了一套考虑传感器厚度及传感器安装孔应力扰动的应变传感器标定装置,该装置精度可到级。该方法简单易行,但是对等强度梁的加工要求较为苛刻。
本文设计了一套主要由高定位精度直线电机位移装置和激光干涉仪组成的高精度无封装FBG应变传感器校准系统。该校准系统由高定位精度的位移装置提供稳定可靠的水平位移量(应变量),由激光干涉仪测量位移变化量,实现了对无封装FBG应变传感器的校准。
1 FBG应变传感器测量原理
光纤布拉格光栅对波长具有选择性反射效应,而FBG应变传感器正是基于此效应制成的。光纤布拉格光栅具有一个中心波长,而对于确定的FBG应变传感器,在实验室温度变化为零的条件下,其中心波长的漂移量可表示为[3,6]:
式中:
Kε—传感器的应变灵敏度系数;
ε—传感器所受到的应变。
由式(1)可知,在温度恒定的条件下,FBG应变传感器的波长漂移量与应变成线性关系。
2 基于直线电机位移台和激光干涉仪的校准系统设计
设计的无封装FBG应变传感器校准系统,如图1所示,主要由直线电机位移装置和激光干涉仪组成。直线电机平台上和直线电机位移装置的基座上分别安装有FBG应变传感器的安装夹具,以便在两夹具之间安装无封装的FBG应变传感器。这样,直线电机平台的移动即可对无封装FBG应变传感器产生稳定可靠的应变量。激光干涉仪对直线电机平台的移动量进行测量,即可测得加载到无封装FBG应变传感器上的应变量高精度值。

图1 无封装FBG应变传感器校准系统简图
直线电机位移装置,如图2所示,主要由直线电机、导轨及运动平台、直线编码器(光栅尺)、驱动器、控制器等部分组成。其中,直线电机与直线编码器均安装在导轨内部,运动平台与直线电机动子相连,其上设计有夹具安装孔,用来与安装光纤光栅应变传感器的夹具(图2中未画出)相连。驱动器与直线电机、直线编码器相连,结合计算机与控制器实现对直线电机位移装置(直线电机动子)的精确控制。
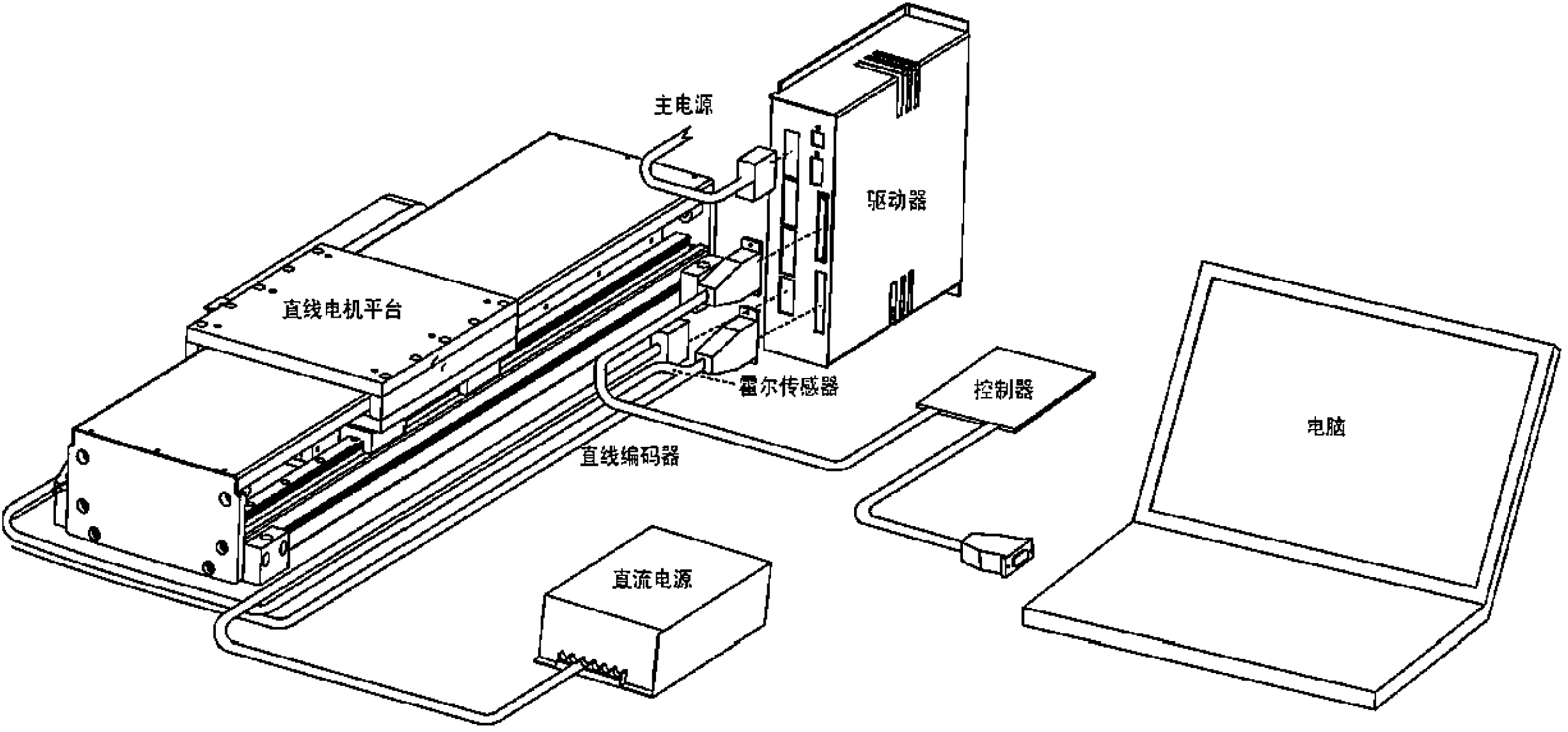
图2 直线电机位移装置简图
直线电机位移伺服控制原理如图3所示,直线电机为伺服控制系统的控制对象;电流传感器、位置传感器及其信号调理电路等为反馈单元;位置、速度和电流三闭环控制器为控制器;直线电机驱动器的功率驱动电路等为执行单元。通过电流环、速度环、位置环共三层的闭环反馈控制,实现对直线电机推力、速度、位移的实时精确控制[7]。

图3 直线电机伺服控制系统原理图
伺服控制系统的核心就是控制器的设计,而控制器中常用的控制算法为 PID 控制算法[8]。典型的PID算法可由式(2)表示:
式中:
e(k)—系统第k次输入偏差;
e(k-1)—系统第k-1次输入偏差;
u(k)—系统第k次输出;
KP—比例系数;
KI—积分系数;
KD—微分系数。
数字PID的参数设置对伺服控制系统的性能有非常大的影响,通常,伺服系统的控制器可以选择比例(P)控制器、比例积分(PI)控制器、比例微分(PD)控制器和比例积分微分(PID)控制器,工程中一般根据被控制对象的特点和控制精度等要求来选择采用某种控制器。在运动伺服控制系统中,最常用的控制器为比例积分控制器,即PI控制器,它具有较好的动态特性、能够较好地消除稳态误差,能满足工程中大部分运动控制系统的要求。本文采用的是PI控制器,具体的参数在实际测试中反复调节决定。
3 无封装FBG应变传感器校准测试
在温度为22 ℃、湿度为50 %的实验室环境下,对一个FBGS-S02型的无封装FBG应变传感器进行校准测试。该传感器的标距长度为220 mm,应变灵敏度系数为1.2 。该传感器使用时的允许误差为±2。根据传感器的标距长度,可计算出传感器长度每变化0.022 mm,将产生100的应变。
将FBG应变传感器的两端分别粘贴在校准系统的FBG应变传感器安装夹具上,如图1中示意,再将传感器的输出端接入到实验室的一套高精度光波测量系统中(图中未画出)。控制直线电机位移装置,调整直线电机平台的位置以调整FBG应变传感器的初始状态到规定的拉直状态。将此时激光干涉仪测得的距离定义为相对零位,即位移为0 mm,并从光波测量系统中读取并记录FBG应变传感器的输出波长。调整直线电机平台的位置,使FBG应变传感器以400的步进产生应变,即直线电机平台以0.088 mm的间距移动,从光波测量系统中分别读取并记录FBG应变传感器对应的输出波长,并利用FBG应变传感器的应变灵敏度系数计算出对应波长变化的应变值。所有结果整理并记录于表1中。

表1 FBGS-S02型FBG应变传感器的校准结果
从表1可以分析得知,校准结果的最大误差为-0.2,满足该传感器±2的允许误差要求。表明所设计的校准系统能够满足无封装FBG应变传感器的校准测试需求。
4 结论
针对无封装FBG应变传感器校准问题,设计了一套主要由高定位精度直线电机位移装置和激光干涉仪组成的高精度无封装FBG应变传感器校准系统,利用该系统对FBGS-S02型的无封装FBG应变传感器进行了校准测试,校准结果的最大误差为-0.2,满足传感器的误差要求,表明该校准系统能够应用于无封装FBG应变传感器的校准测试。
猜你喜欢
特产研究(2022年6期)2023-01-17 05:06:16
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:34:06
汽车维修与保养(2020年11期)2020-06-09 05:42:16
计测技术(2020年6期)2020-06-09 03:27:14
航天电子对抗(2019年4期)2019-06-02 08:22:40
制导与引信(2017年3期)2017-11-02 05:16:58
实用口腔医学杂志(2017年6期)2017-09-19 02:51:28
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
中国照明(2016年4期)2016-05-17 06:16:15
