包络谱稀疏指标盲滤波器的轴承状态监测
2023-07-27 07:05:54吴海威王业统黄福伟
机械设计与制造 2023年7期
吴海威,王业统,李 美,黄福伟
(1.海南科技职业大学信息工程学院,海南 海口 571126;2. 海南大学机电工程学院,海南 海口 570228;3.海南大学计算机与网络空间安全学院,海南 海口 570228)
1 引言
旋转机械的状态监测应用已经越来越广泛,先进的工业开始在其设计中引入越来越多的专用状态监测系统[1]。由于工业系统不断提高的计算能力以及存储能力,并且进一步降低现代IT系统的成本,因此基本状态监测作为系统监控的保护手段地位更为凸显。尤其针对复杂的机械设备,例如风力涡轮机和风电机组的齿轮箱[2-3]。
由于多领域统计指标的简单性,盲跟踪信号特征的概念已经在工业系统监测中得到广泛应用,然而,这一盲信号分析概念仍有进一步改进的空间,并使其与其他最先进的振动分析方法更好地结合起来,最普遍的检测方法之一是观察振动信号的循环平稳行为[4]。盲滤波方法类似于最小熵卷积(MED)滤波所采用的盲反卷积思想,该滤波使用时间波形的峰度作为统计量来最大化MED,最初应用于地震信号处理领域[5]。然而,峰度作为最大化的措施有一些缺点。当脉冲频率增加时,峰度值趋于减小。当脉冲相互重叠时,峰度值甚至可以减小到高斯信号的峰度值;另一方面,当脉冲频率非常低,以至于测量中只有一个脉冲时,峰度值趋于最大[6]。
近年来,人们关注的焦点已经从时间波形统计转向循环平稳特性。文献[7]提出的方法在盲反褶积过程中采用了二阶循环平稳性指标,它允许用户以高效灵活的方式最大化ICS2。然而,该方法仍然需要故障频率的先验知识才能工作。为了弥补这个潜在的问题,稀疏性的概念应用于包络谱,文献[8]提出在滤波信号的包络谱上使用范数,他们扩展了源于峭度图的滤波器组的思想,用矩代替峭度。然而,这种方法仍然不是完全盲的,即最终用户仍然需要用范数值检查滤波器组并选择适当的频带。
为了解决上述方法存在的问题,提出了一种包络谱稀疏指标盲滤波器的齿轮状态监测方法。该方法能够在不需要知道有关机械部件的特征故障频率等先验信息条件下,利用包络谱的稀疏性来跟踪振动信号中具有二阶循环平稳特征的故障。轴承数据集实验结果证明提出方法的有效性。
2 提出的方法
2.1 稀疏性度量
自从稀疏性大部分由于压缩感知而成为一个热门的研究方向以来,研究人员引入了许多稀疏性度量。每种方法都有其优点和缺点,其中一个广泛使用的稀疏性指标是范数,属于范数族[9]。
另一个平方包络谱的指标是谱域中的谱负熵。谱负熵源于将信号中的瞬时能量流转换为概率分布,因此,负熵考虑了能量流x的归一化。
谱负熵是谱熵的负,在时域中的定义为:
式中:∈x(n)—信号xk(n)的时域包络。在光谱域中的包络为:
时域中的负熵标明了脉冲信号的内容,很像峭度图。另一方面,谱域中的负熵量化了重复或循环平稳的信号内容。
因此,这里研究了谱域中的负熵,并将其作为盲滤波的第二个度量指标。
这里选择将Hoyer指数作为包络谱的第三个也是最后一个稀疏度度,Hoyer指数本质上是范数的规范化版本[10]。当且仅当光谱仅包含单个非零分量时,将Hoyer指数的计算结果作为单位;当且仅当所有光谱分量相等时,Hoyer指数的值为0。
式中:x—样本向量;n—样本数;N—样本总数。
2.2 盲滤波
盲滤波即找到一种滤波器,该滤波器最大化从噪声测量信号x开始的信号:
式中:s—估计输入;h—逆滤波器,*—卷积运算。注意,向量和矩
阵以粗体字表示,以区别标量,卷积运算表示为:
式中:L、N—s和h的样本数量。因此平方包络∈x的计算式如下:
上式还可以表示为:
式中:sH—s的Hermitian转置;diag(sH) —一个对角矩阵,其对角线上的值为向量sH的值。平方包络谱Ex—该平方包络的傅里叶变换:
其中,
其中,n= 0..L-N- 1,k= 0..K- 1 和K- 1 对应于最大感兴趣频率的指数,F的尺寸( )L-N,K。
平方包络谱Ex的范数的计算公式如下:
用向量表示上式,公式如下:
分母可用以下恒等式计算:
式(13)的分子可进一步推导,如下所示:
因此,式(13)可以改写为:
将式(10)代入式(16)中,可以得到:
可用式(17)得到广义Rayleigh熵,并可通过迭代特征值将其最大化:
Rayleigh熵有一个性质:它相对于h的最大值等于它的最大特征值λ和相应的特征向量[11]。
因此,最大化Rayleigh 熵可以找到相应指标和滤波器的最大值。
然而,为了得到实特征值,相关矩阵RXW1Xh和RXW2Xh需要符合Hermitian矩阵,并且RXW2Xh需要满足半正定。
如果满足这些条件,Rayleigh熵是迭代计算滤波器系数的有效方法。
每次迭代只需计算最大特征值和对应的特征向量,利用幂函数法等算法可以有效地实现这一点。因此可改写为:
其中,
(1)初始化h;
(2)用式(21)基于h和X计算RXW1Xh和RXW2Xh;
(3)通过式(22)找出λmax和与所用标准的较高值相对应的新滤波器h;
(4)使用新的h返回第二步,直到达到收敛或者迭代完成。
用向量表示上式:
经过多次重新改写后,广义Rayleigh熵可表示为:
谱负熵ΔIE为谱熵的负值,对于包络谱的定义为:
用向量表示上式:
其广义Rayleigh熵为:
谱负熵也具有一定的作用,即其始终大于零且小于ln(N):
这对时间域ΔI∈中的负熵同样有效。
证明:由于谱负熵始终大于零且小于ln(N) :
根据香农公式信息熵H可得到下式:
式中:pi—一组独立的概率。因此,对于,可证明下式:
由Kullback-Leibler散度(或相对熵)可知:
因此,当,有:
以上证明过程同样适用于时域ΔI∈中的负熵。
2.3 实际考虑因素
包络谱稀疏性的最大化是基于增加稀疏性的主要成分是潜在故障特征的假设。因此,首先需要对信号进行白化,以便在解决最大化问题之前去除确定性因素,因为这些因素通常会在包络频谱中引入高幅度离散峰值。
相关矩阵RXW1X和RXW2X的计算包括使用傅立叶矩阵来计算包络谱。然而,在实际计算中,可以用FFT代替,以减少计算时间和内存需求。
计算的总持续时间将主要取决于信号长度和选择的滤波器长度。由于长信号和滤波器的原因,指标可能变得相当大,因此需要的乘法运算和FFT的点数可能会导致计算时间较长。
2.4 非平稳角速度情况的推广
该方法的改进可以使滤波器相关矩阵的傅里叶矩阵的核依赖于角度而不是依赖时间。这样,瞬时角速度变化可以直接考虑在滤波器中,可以通过速度同步离散傅里叶变换(VSDFT)轻松实现。然后傅里叶矩阵可以改写为:
再将其传递至滤波器优化。
2.5 单输入多输出(SIMO)系统的延伸
这里方法允许一个相当直接的扩展到一个有Q响应xq的情况。由hq滤波的xq的每个响应可以叠加在一起,然后返回s的估计。
使用Rayleigh商的迭代过程仍然可以用于SIMO情况,唯一需要的调整就是相关矩阵和滤波器向量。将RXW1X和RXW2X表示为互相关矩阵:
对于RqWq,xq的加权自相关矩阵和非对角化矩阵是xq和xq͂的加权互相关矩阵。然后,过滤器h转化为:
然后,兴趣信号s的第q个贡献的计算公式如下:
Xq是式(7)中定义的xq的Toeplitz 矩阵。因此,整个兴趣信号s的计算公式如下:
3 仿真结果分析
为了验证所提出的方法,首先考虑了一个仿真案例:具有高斯分布振幅的周期脉冲。为了增加一些对比参考,将该方法与基于最小熵反褶积(MED)的时域盲反褶积滤波(ICS2)和基于循环平稳源信号的时域谱负熵滤波的性能进行了比较[12-13]。
周期脉冲信号s1与IRFg1,s和高斯噪声g1,n进行卷积。生成的信号,如图1所示。但是,不是只分析单个仿真,而是将加性高斯噪声的信噪比从-80DB 变化到0DB,以评估滤波器的趋势行为。整个信号的总方差保持不变。对于时域盲滤波器,使用40个样本的滤波器长度,而基于稀疏性的谱滤波器使用20个样本的滤波器长度,最大迭代次数设置为50。
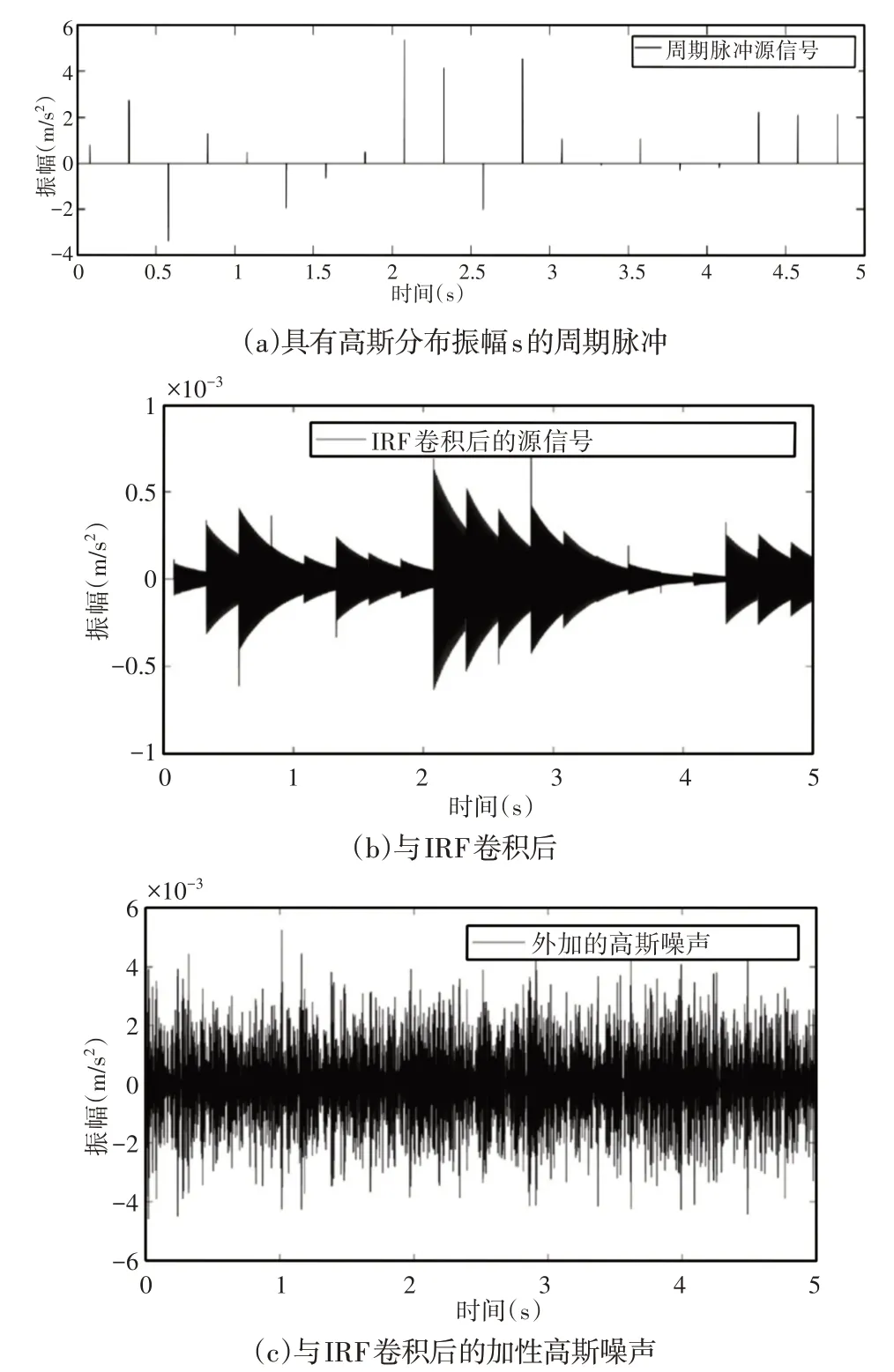
图1 模拟情况1输入信号Fig.1 Simulate the Input Signal of Case 1
从-80dB到0dB SNR的结果指示器变化曲线,如图2所示。可以看出,在这种特殊情况下,ICS2滤波器的性能优于MED和时域负熵滤波,基于稀疏度指标的滤波器显示在大约-38dB处显著增加,类似于ICS2滤波器。
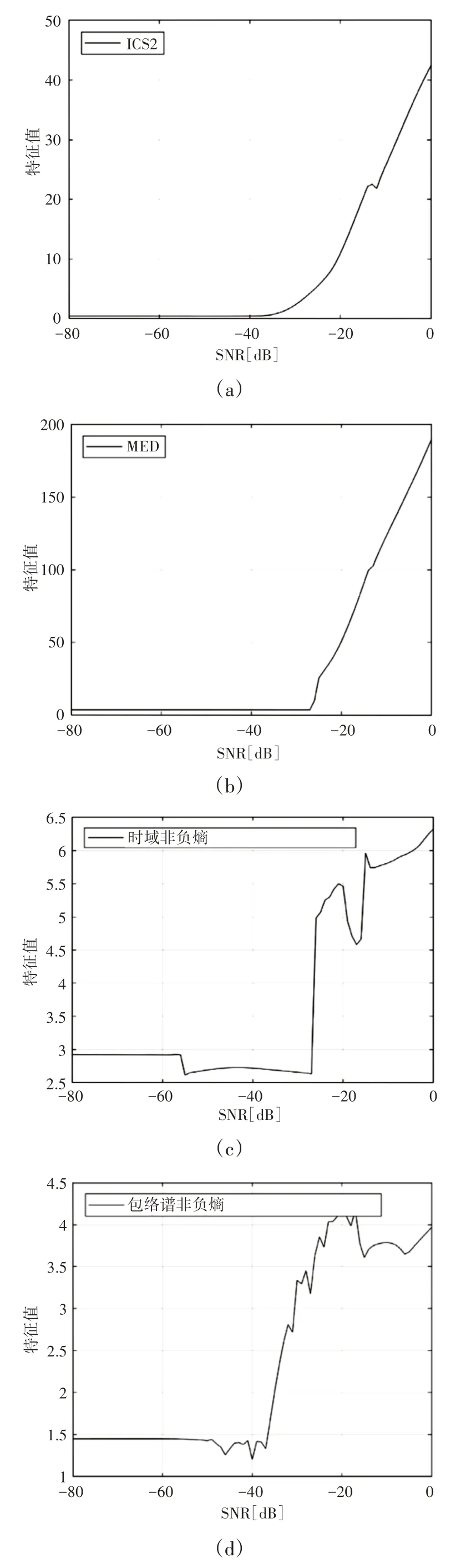
图2 仿真案例中不同指标的趋势分析Fig.2 Trend Analysis of Different Indicators in Simulation Case
为了进一步验证,平方包络光谱的颜色图,如图3所示。时域滤波器(ICS2、MED和时域负熵)的包络特性表明,对于更高的信噪比,故障频率在4Hz处具有明显的谐波。相比之下,稀疏滤波器的包络谱在4Hz处显示出一次故障谐波,但同时也显示出一个较低的频率分量,其振幅较高。这是由于模拟信号的包络谱包含非常低的频率调制,这是由于周期脉冲的高斯分布振幅造成的。此外,这种低频调制增加了包络频谱的稀疏性。
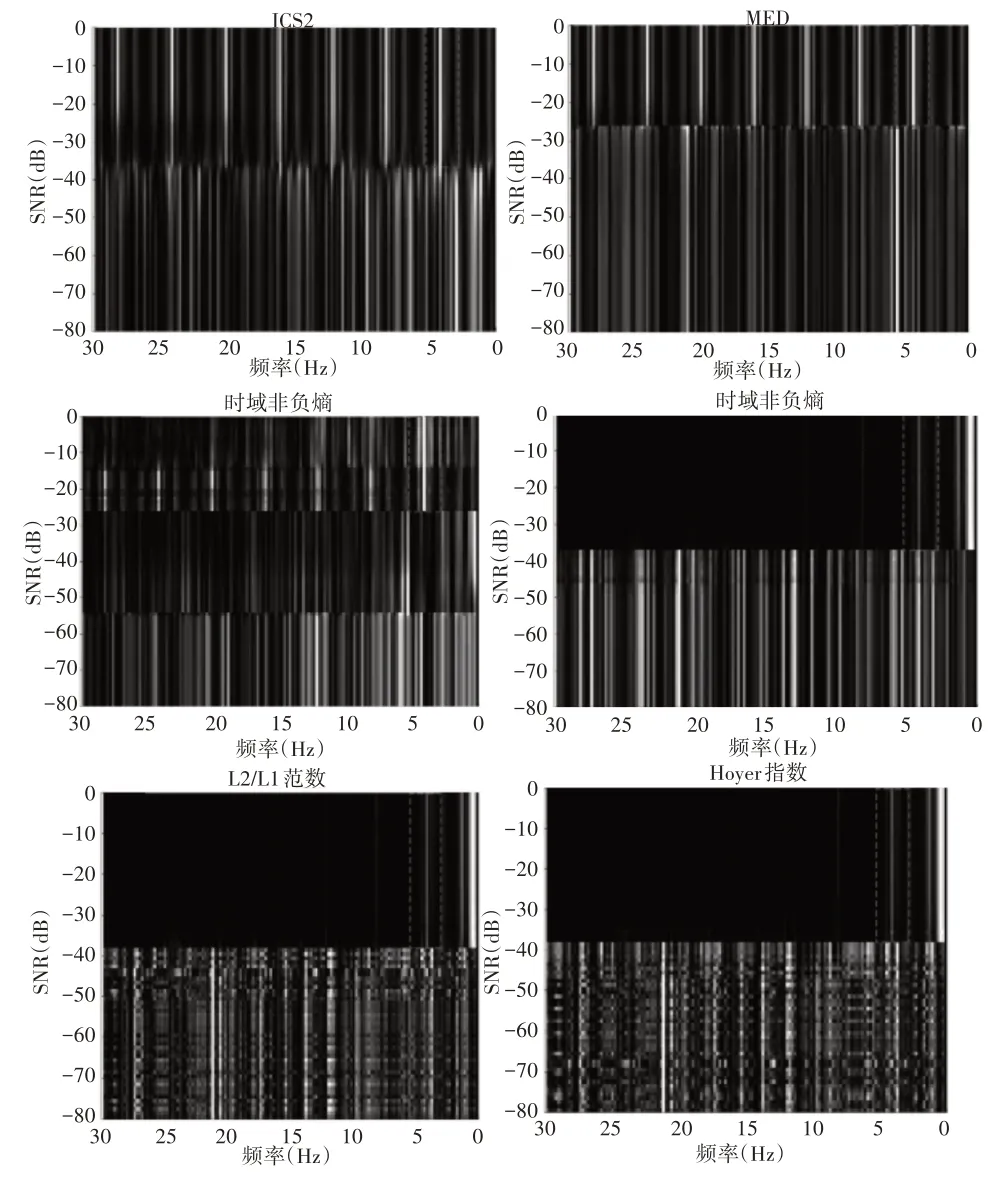
图3 模拟情况下归一化平方包络谱的趋势分析Fig.3 Trend Analysis of Normalized Square Envelope Spectrum in Simulation
滤波信号,如图4所示。信噪比为-19db。信号的振幅在-1和+1之间进行标准化。结果表明,时域滤波器对输入信号的周期脉冲序列进行去卷积,而基于包络谱稀疏性的滤波器提取周期脉冲序列用IRF反褶积后的周期脉冲序列。然而,脉冲序列产生的包络谱显示出多个谐波,与单个离散峰值相比,减少了稀疏性。因此基于稀疏性的方法在与IRF卷积后过滤掉脉冲序列,这导致稀疏性介于纯正弦调制和脉冲序列之间,因此,在通过跟踪故障进行故障检测的意义上,不必去除与IRF 的卷积包络谱中的峰值。在有无IRF 卷积的情况下,包络谱的特征将有所不同。此外,由于假设主要的二阶循环平稳分量来自故障源,因此无论IRF卷积如何,都可以通过包络谱稀疏性来跟踪故障的演化。
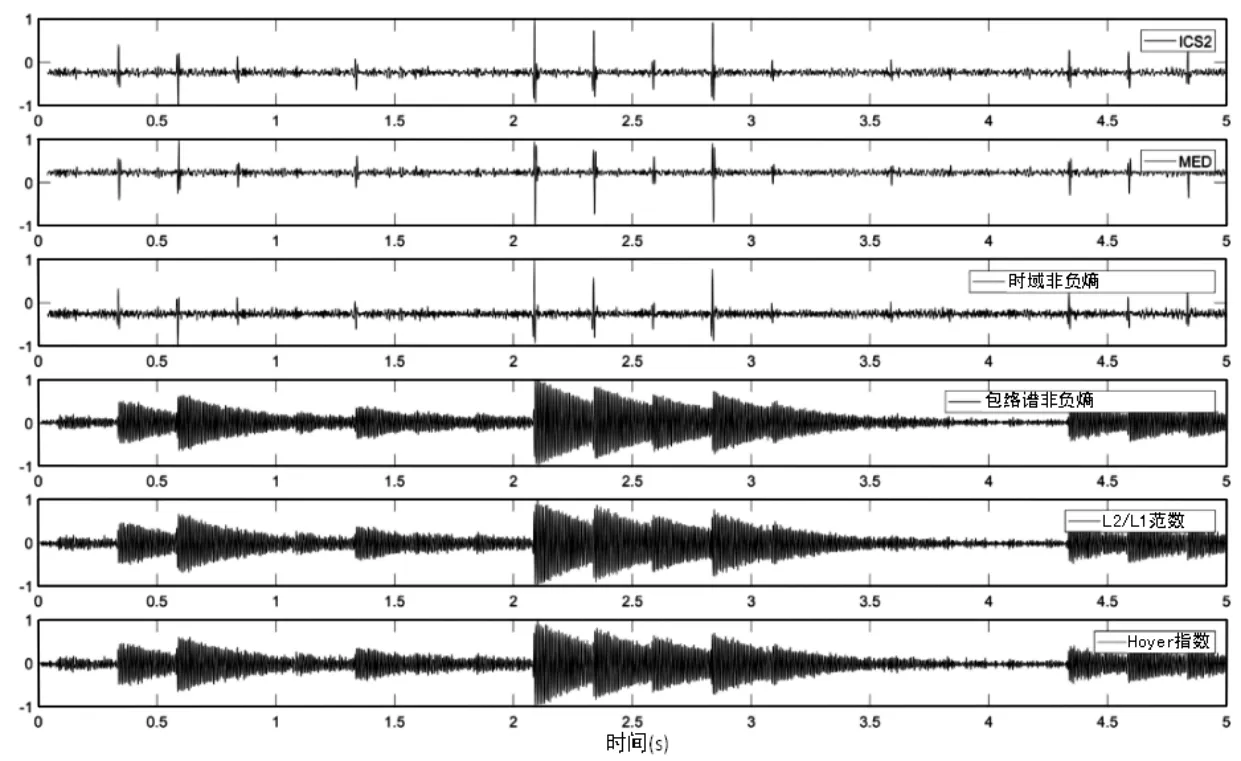
图4 仿真情况1的-19dB信噪比下的时间波形Fig.4 Time Waveform Under -19dB SNR in Simulation Case 1
4 实验分析和结果
这里方法的数据集是Cincinnati 大学智能维修系统中心(IMS)提供的来自美国宇航局预测数据仓库的振动信号,该数据集是在一个轴承发生外圈故障的运行到故障试验期间测量的。轴承试验台,如图5所示。由一根轴连接到一台转速为2000RPM(转/分)的交流电机上。施加2700kg的径向载荷。四个Rexnord ZA-2115轴承与高端加速计一起安装在轴上。总共进行了三次故障检修的实验,采样速率为20kHz,每10min记录一次。这里描述的方法在第二个数据集(包含984个测量样本)上进行了测试,其中轴承1由于外圈缺陷而发生故障。
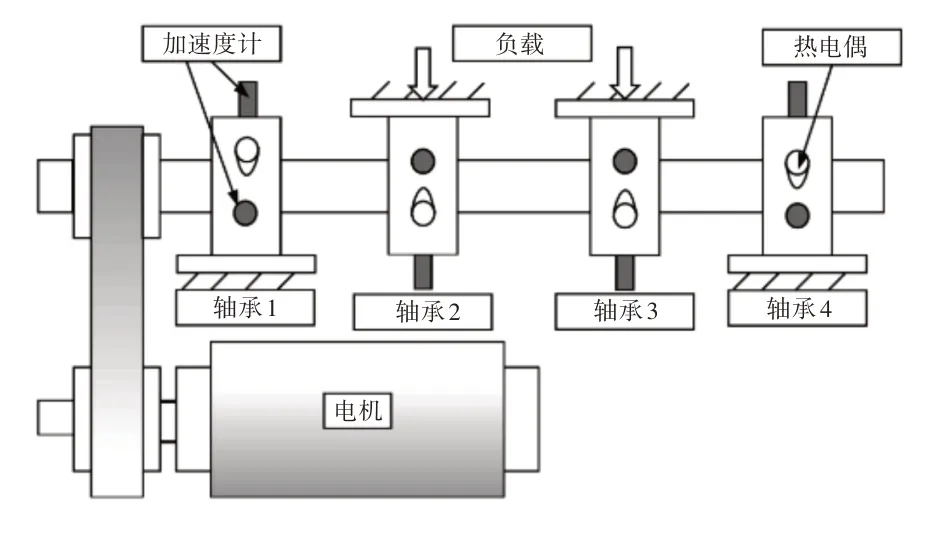
图5 轴承试验设备Fig.5 Bearing Test Equipment
然后比较了模拟使用的六种滤波器,为比较各种方法的性能提供一些参考。外圈的特征故障频率约为236Hz,因此用作ICS2滤波器的输入。
过滤器长度设为20 个样本,最大迭代次数设为50。理论上,ICS2滤波器直接跟踪故障频率调制,因此它跟踪故障发生时的信号特征变化的性能最好。
结果似乎证实了上述结论,如图6所示。在第4天开始时,ICS2过滤器的ICS2指标开始上升。MED滤波器和时域负熵滤波器的性能很差,因为文献[14]已经证明峰度或其他跟踪非高斯性的指标在这个特定的数据集上表现不佳。事实上,从测试开始信号就已经是非高斯信号了。因此,在这种情况下,这两个滤波器在有效跟踪故障方面表现不佳。
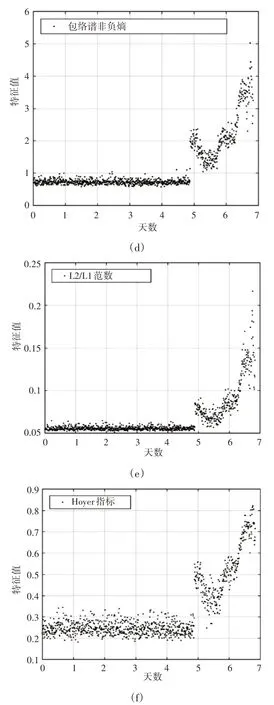
图6 在IMS数据集上用六种不同的方法滤波后变化Fig.6 Changes After Filtering with Six Different Methods on IMS Data Set
另一方面,基于包络谱稀疏性的滤波器表明,由于故障,信号的主要循环平稳性增加。在第5天开始时,所有三个过滤器的指示值都会突然增加。轴承劣化主要表现为循环平稳性的显著波动,并不是非高斯性的波动。滤波从噪声中剔除包络谱中的故障频率,滤波前后包络谱的差异,如图7所示。从而简化并加速了对故障类型的信号的检查。
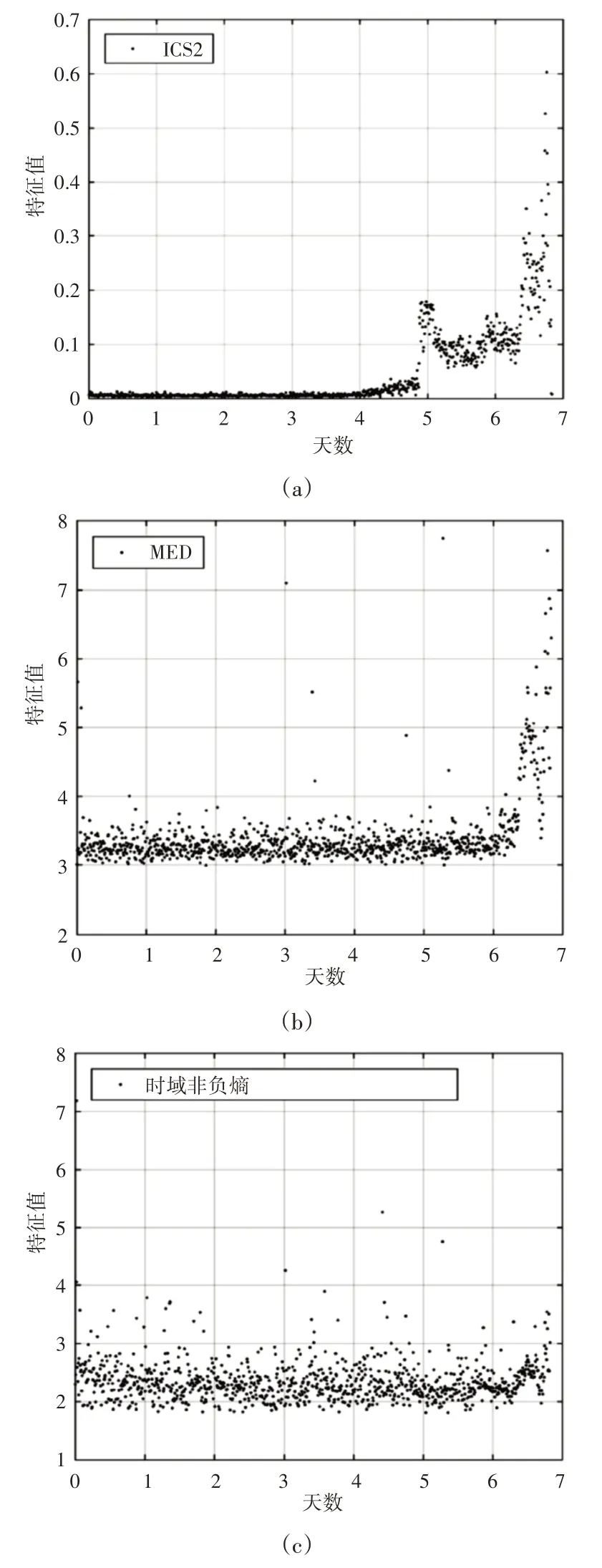
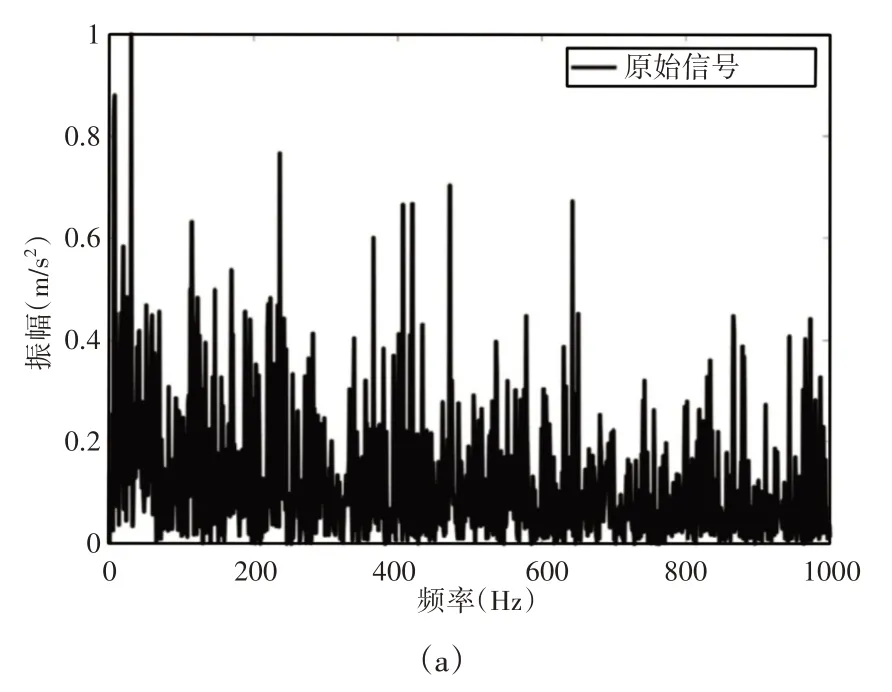
图7 测量用Hoyer指数滤波器滤波后的包络谱Fig.7 Envelope Spectrum After Filtering by Hoyer Exponential Filter
5 结果分析
实验结果表明,在不预先知道故障频率的情况下,利用振动信号的盲滤波方法进行状态监测是可行的。仿真结果表明,基于包络谱稀疏性的滤波方法优于传统的基于时间指示器的滤波方法,如MED。尤其是当故障特征在信号中引入循环平稳性时,这一点尤为明显,而包络谱可以有效地检测到信号。针对故障脉冲重复率高且在下一个脉冲前没有完全衰减的情况,说明基于峭度滤波具有一定的局限性。在这种情况下,由于缺乏强烈的非高斯性质,峰度只会受到轻微影响,当轴承频率在千赫兹范围内时,可能会发生这一现象。
与传统的盲反褶积滤波器(如MED)相比,基于稀疏度的滤波器在工作方式上的另一个显著区别是,这里设计的滤波器纯粹是为了最大化信号的某一特性。这意味着它们不会恢复为源信号(例如,重复冲击)、从混合物中分离信号或对信号进行去噪。这与过去的方法不同,过去通常使用盲过滤。因此,用户在分析结果时需要记住这个属性,因为过滤后的响应可能不能准确地表示感兴趣的信号,而是最大化所用标准的失真版本。然而,由于包络谱是基于振动的状态监测中最常用的工具之一,因此该方法的泛化性能较高。
实验结果表明了这里方法对循环平稳源的灵敏度较高。虽然稀疏滤波器在检测故障时比ICS2滤波器稍慢,但它们仍然能够在不知道实际轴承故障频率的情况下准确地跟踪故障。结果还表明,简单地观察滤波信号的包络谱稀疏性,可以作为信号循环平稳性的可靠盲跟踪度量指标。最后,这里的三种稀疏性措施在跟踪能力方面的表现并不是很突出。
这里采用了一种新的方法来观察盲滤波和包络谱的结合。然而,几乎每种方法都存在一些缺点,可能会对结果产生负面影响。使用这种过滤器的主要难题在于过滤器长度的选择。这个长度会对结果和计算时间产生较大影响。显然,较长的滤波器长度会增加计算时间,且也会导致滤波器系数的收敛速度变慢或不收敛。如果由于这种不收敛而导致指示值剧烈振荡,则后者可能特别麻烦。因此,建议缩短滤波器的长度,同时抑制对滤波器无用的频率。
6 结论
为了解决包络谱稀疏问题,提出了一种基于包络谱稀疏指标盲滤波器的轴承状态监测方法。提出了一种盲滤波技术,利用包络谱的稀疏性来跟踪振动信号中具有二阶循环平稳特征的故障的存在。三个稀疏性度量用于推导适用于基于Rayleigh商迭代的方法的滤波器公式。仿真和实验结果证明了如下结论:
(1)这里方法对循环平稳源的灵敏度较高,虽然稀疏滤波器在检测故障时比ICS2滤波器稍慢,但它们仍然能够在不知道实际轴承故障频率的情况下准确地跟踪故障。
(2)当故障信号不具有强脉冲成分时,该方法的性能优于传统的盲反卷积方法,提出方法能够有效解决包络谱稀疏问题,实现有效的滤波器状态监测。
(3)较长的滤波器长度会增加计算时间,且也会导致滤波器系数的收敛速度变慢或不收敛。
猜你喜欢
昆明医科大学学报(2021年4期)2021-07-23 01:21:38
国际放射医学核医学杂志(2020年4期)2020-07-27 01:53:26
风流一代·经典文摘(2019年12期)2019-09-10 05:48:08
测控技术(2018年11期)2018-12-07 05:49:02
雷达学报(2018年3期)2018-07-18 02:41:16
意林原创版(2018年3期)2018-04-03 15:45:00
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
罕少疾病杂志(2016年5期)2016-03-11 16:34:41
西北工业大学学报(2015年4期)2016-01-19 03:31:55
电测与仪表(2015年2期)2015-04-09 11:28:50