混动汽车的工况自适应等效燃油消耗最小控制
2023-07-27 07:05:34胡银全刘和平游青山
机械设计与制造 2023年7期
胡银全,刘和平,游青山
(1.重庆工程职业技术学院,重庆 402260;2.重庆大学,重庆 400044)
1 引言
与传统燃油汽车相比,混合动力汽车具有能源利用率高、环境污染小等优势,能够有效缓解能源危机和环境污染问题[1]。混合动力汽车具有两个以上动力源,不同的转矩分配方法导致的能耗也差别较大,因此对混合动力汽车的能量管理策略进行实时优化,对于节能减排具有重要意义[2]。
混合动力汽车的能量管理策略可以分为基于规则的化方法[3]、全局优化方法[4]与实时优化[5]方法。基于规则的能量分配方法包括基于确定规则和基于模糊规则两大类,其中模糊规则可以根据行驶工况进行调整,因此燃油经济性一般好于确定规则;但是模糊逻辑依赖专家经验制定,其控制性能难以得到保证。文献[6]使用粒子群算法优化规则控制中的不确定阈值,比纯燃油汽车和未优化控制规则都具有较好的燃油经济性。
基于全局优化的能量管理方法需预知行驶工况,因此无法应用于实时控制,多作为其他控制策略的评价标准,全局优化方法包括动态规划法、极小值原理等。
文献[7]将能量管理优化与实时优化分两步进行,一是使用动态规划得到最优转矩分配;二是使用神经网络拟合车辆状态与最优转矩分配的关系,使转矩分配结果具有实时控制能力。实时优化方法以需求动力为输入、以车辆状态为约束,实时优化下一时刻的控制量,是一种在线优化方法,包括燃油消耗最小方法、模型预测控制方法等。文献[8]以马尔可夫模型预测车辆加速度,以燃油经济性为目标使用模型预测控制方法进行优化,与恒值模型预测控制比提高了车辆的燃油经济性。实时优化方法是一种在线优化和控制方法,但是实时优化方法由于没有全局先验知识,因此是一种非最优控制方法。
这里针对混合动力汽车的燃油经济性控制问题,建立了混合动力汽车的实时控制仿真模型;使用极小值原理和等效燃油消耗最小策略设计车辆控制律,为了适应复杂多变的工况,提出了等效因子随驾驶工况的自适应变化策略,实现了车辆在综合驾驶工况下的燃油经济性控制。
2 无级变速混合动力汽车模型
2.1 动力系统结构及工作模式
这里研究的混合动力系统结构,如图1所示。动力系统主要由发动机、离合器、ISG电机、CVT无级变速器等组成。
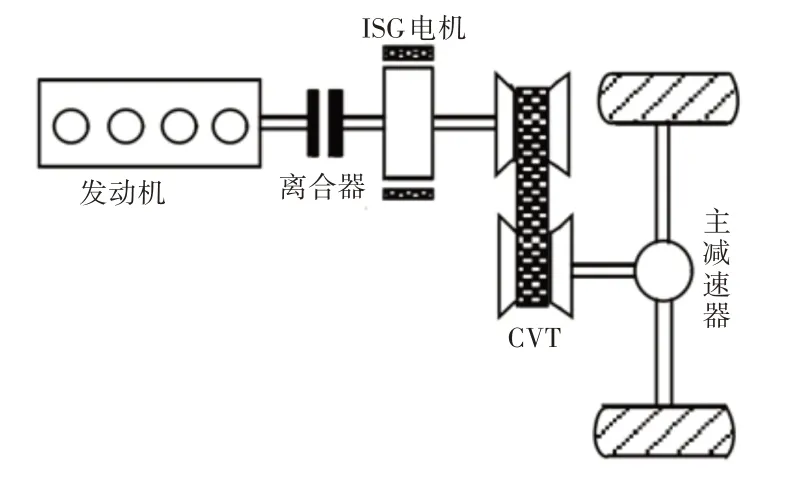
图1 混合动力系统结构Fig.1 Structure of Hybrid Power System
通过控制离合器的通断,可以实现纯电驱动、纯发动机驱动、混合驱动、行车充电和制动能量回收等工作模式。
(1)纯电驱动模式。在车辆起步或低速运转阶段,为了防止发动机工作在低效率区域,由ISG电机单独驱动车辆,此时离合器为断开状态。
(2)纯发动机驱动模式。当车速增加或者需求功率提高时,车辆进入纯发动机驱动模式,电机不工作,此时离合器处于闭合状态。
(3)混合驱动模式。当车辆车速较高或者需求转矩较大,发动机在最佳工作点不足以驱动车辆,此时进入混合驱动模式,即发动机和电机同时工作,离合器处于闭合状态。
(4)行车充电模式。当车辆的需求功率下降,且电池SOC未达到上限时,为了保证发动机工作在高效率区域,车辆进入行车充电模式,即发动机除了用于驱动车辆,剩余能量对电池进行充电。
(5)制动能量回收。当车辆进入制动状态时,在安全的前提下,最大程度地回收制动能量,回收能量存储于电池中。
车辆的制动模式包括再生制动、机械制动和混合制动三种,制动模式的确定规则为:(1)为了防止电池过充,当电池SOC>90%时,使用机械制动;(2)为了保证车辆安全,当制动强度>0.7时,使用机械制动;(3)当CVT输入转速<500rpm时不满足充电要求,只能使用机械制动;(4)其余情况下优先使用再生制动,当再生制动不满足制动要求时使用混合制动。
以上规则流程,如图2所示。图中:Treq—车辆需求转矩;n—CVT输入转速;z—制动强度。

图2 制动规则Fig.2 Braking Rule
2.2 车辆实时控制模型
混合动力车辆的实时控制模型包括动力系统模型、车辆动力学模型、驾驶员模型,动力学模型又包括发动机模型、电机模型、电池模型和CVT模型等。
(1)发动机模型
发动机稳态输出转矩与节气门开度和发动机转速有关,可通过查表获得,记为:
式中:Te—发动机输出稳态转矩;α—节气门开度;neng—发动机转速;f1()—查表函数。
由于发动机转矩输出存在迟滞问题,因此使用含有迟滞的一阶惯性环节将稳态转矩转化为动态转矩,即:
式中:τ—迟滞时间;kτ—惯性系数;s—拉氏因子;Teng—动态输出转矩。发动机的燃油消耗率模型可通过二维插值法获得,即:
式中:be—发动机的燃油消耗率;f2()—二维插值函数。由此得到发动机燃油消耗量为:
式中:mf—发动机燃油消耗量;Peng—发动机输出功率。
计算方法为:
(2)电机模型
电池放电带动电机驱动车辆,电机的驱动功率为:
式中:Pbat—电机的驱动功率;Tmot—电机转矩;n mot—电机转速;
ηmot—电机充放电效率。
电池处于充电状态时,电机的发电功率为:
电机工作效率ηmot由实验建模得到,记为:
(3)电池模型
将电池等效为内阻模型,即Rint模型。电池内阻记为Rin,开路电压记为Uoc,输出电压记为Ub,内部电流记为Ib,则电池电流、充放电效率、SOC值分别为:
式中:Pb—电池功率,Pb>0表示放电,Pb<0表示充电;ηbat—电池的充放电效率;SOC(t)—t时刻电池SOC值;Qc—电池标称电量。
(4)CVT模型
使用台架实验获得CVT的输入输出传动效率模型,并以此得到CVT输出转矩,为:
式中:ηcvt—CVT传动效率;f4()—基于实验数据的拟合函数;Tin—
CVT输入转矩;icvt—CVT速比;Tout—CVT输出转矩。
(5)车辆动力学模型
使用牛顿第二定律构造车辆的动力学方程,车辆行驶过程中所受阻力包括空气阻力、摩擦阻力、爬坡阻力和加速惯性力,得到车辆的动力学模型为:
式中:Td1—动力系统施加在车辆上的转矩;r—车轮半径;CD—空气阻力系数;A—车辆的迎风面积;v—车速;m—车辆质量;g—重力加速度;f—路面的滚动摩擦系数;α—路面坡度;δ—旋转质量换算系数。
当Td1为驱动力矩时有:Td1=(Teng+Tmot)i0icvtηcvtηT;
当Td1为制动力矩时有:Td1=Tbra+Tmoti0icvtηcvtηT。
式中:i0—主减速器传动比;ηT—传动系统效率;
Tbra—机械制动力矩。
(6)驾驶员模型
这里使用PID控制构造驾驶员模型,即:
式中:e(t)—车速误差;vtar—目标车速;vact—实际车速;Td2—车速跟踪转矩需求;Kp、Ki、Kd—比例系数、积分系数和微分系数。
根据以上建模过程,得到混合动力车辆的实时控制仿真模型,如图3所示。

图3 车辆仿真模型Fig.3 Simulation Model of the Vehicle
3 基于等效因子的多目标优化
本节使用庞特里亚金极小值原理和等效燃油消耗法求解车辆在不同工况下的最优控制律。
3.1 混合动力系统能量管理问题模型
混合动力汽车能量管理问题的目标是某个行驶周期内燃油消耗量最小,即性能指标为:
式中:J—性能指标;t0—初始时刻;tf—终止时刻;ṁf—燃油消耗率;u(t) ={icvt(t),SF(t)}T—控 制 量;icvt(t)—CVT 速 比;SF(t) =Tmot Treq—电机转矩分配系数;Treq—需求转矩;x(t) =S(t)—系统状态量。状态方程为:
构造哈密顿函数为:
式中:λ(t)—协态。
根据极小值原理[9],根据式(14)可以求得最优控制u*(t)、最优状态量x*(t)和最优协态λ*(t),即:
3.2 等效燃油消耗最小策略
结合前文的混合动力系统实时控制模型,使用等效因子将车辆的电量消耗转化为燃油消耗,得到等效燃油消耗策略的哈密顿函数为:
式中:s(t)—等效因子;Qlhq—燃油最低热值;Qc—电池最大容量。
等效因子s(t)对燃油消耗策略影响较大,若s(t)过大则车辆倾向于用油,不利于燃油经济性;
若s(t)过大则车辆倾向于用电,利于燃油经济性,但是电池容易过充或过放而影响寿命。
另外,等效因子的设置还需要满足边界条件约束,在下文中将讨论等效因子关于工况的自适应调整方法。
3.3 基于等效燃油消耗的多目标优化
若只关注车辆的燃油经济性,会造成发动机频繁的启动关闭和CVT速比变化率较大。发动机频繁的启动关闭会减少发动机和离合器使用寿命;CVT速比变化率较大时,车辆传动系统的动态性能下降,甚至使液压系统无法响应。因此,为了防止发动机频繁启停和CVT速比变化率过大,将两者作为优化子目标引入到哈密顿函数中,为:
式中:α—发动机启停次数权值;β—CVT速比变化率权值;C()—计数函数;Ess—发动机状态标志,当状态由0变为1时计数函数C()加1;Δicvt—速比变化量;I—速比变化量阈值,取为2。按照式(14)完全一致的方法可求得式(16)的最佳控制量、最佳状态量。
根据经验取β=0.1,在HWEFT、UNIF01、EPA75、MANHANTTAN等4种标准工况下对α进行仿真测试,分别测试α∈[0,1]不同取值对发动机启停次数和CVT速比变化率的影响,电池SOC初值设置为0.7,时间步长为0.1s,测试结果,如图4所示。
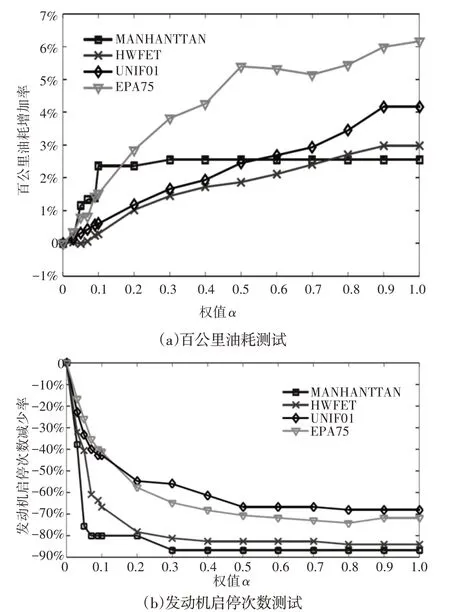
图4 权值测试结果Fig.4 Weight Testing Result
百公里油耗随权值α变化曲线,如图4(a)所示。发动机启停次数随权值α变化曲线,图中启停次数减少率以α= 0 为基准,如图4(b)所示。
分析图4可知,混合动力车辆的百公里油耗随着权值α的增大而提高,发动机启停次数随α的增大而减少。这是因为当α增大时,说明优化目标更加关注启停次数,因此发动机启停次数减少而燃油消耗有一定上升。综合图4(a)和图4(b),α= 0.3时发动机启停次数减少率几乎不再下降,而燃油消耗增加率不足4%,因此最终取α= 0.3。
4 基于工况识别的自适应等效因子
本节首先对行驶工况进行智能识别,而后依据行驶工况和电池SOC初值给出自适应等效因子。
4.1 工况特征提取
为了有效识别车辆的行驶工况,选择11个参数组成特征向量,分别为:平均车速vm、最大车速vmax、平均加速度am、最大加速度amax、最大减速度dmax、平均减速度dm、怠速时间占比ri、加速时间占比ra、减速时间占比rd、匀速时间占比rc、怠速次数fi。
每个标准工况的行驶总时间不同,若每个标准工况只提取一组特征参数,则用于训练和测试的样本数量不足。为了解决以上问题,提出了行驶工况的重叠采样法,具体方法为:将标准行驶工况每120s作为一组样本,从0s开始采样,每间隔30s采样一次,按照这种采样方法,样本之间存在重叠,因此称为重叠采样法。重叠采样法可以有效增加样本数量,解决样本数量不足的问题。
4.2 工况智能识别
学习矢量量化神经网络兼具监督学习和竞争学习的思想和优势,因此使用学习矢量量化网络构造行驶工况的智能识别方法。学习矢量量化网络由输入层、竞争层、输出层等组成,如图5所示。输入层与竞争层间为全连接,竞争层与输出层间为部分连接。图中(x1,x2,…xn)为输入向量,wij为输入层神经元i与输出层 神 经 元j间 的 权 值,(y1,y2,…ym) 为 竞 争 层 输 出 向 量,(o1,o2,…ol)为类别标签。
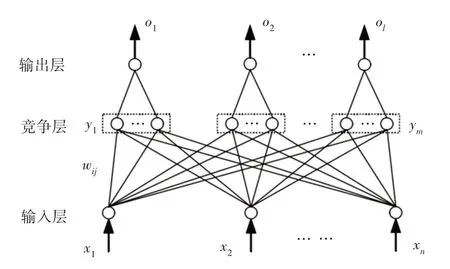
图5 学习矢量量化网络Fig.5 Learning Vector Quantization Network
学习矢量量化网络[10]的学习规则包括LVQ1和LVQ2两种,这里使用LVQ1学习规则,分为以下步骤实现:
(1)初始化网络结构和权值参数wij,设定参数学习效率η、最大学习次数Tmax、误差目标e;
(2)计算输入向量与竞争层神经元之间的距离,即:
按照距离最小的原则选择竞争层中与输入距离最小的神经元,并得到其对应的输出类别标签Li;
(3)记输入向量的实际类别标签为Lx,若Li=Lx说明胜出神经元类别与实际类别一致,此时权值训练方法为:
若Li≠Lx说明胜出神经元类别与实际类别不一致,此时权值训练方法为:
式中:η—学习率。
(4)训练结束。当达到最大训练次数或者达到设定误差时,训练过程结束。
按照方法提取MANHANTTAN、UDDS、US06、WVUINTER 等4种标准工况下的特征参数,4种标准工况分别记为工况1、工况2、工况3、工况4。工况1和工况2提取了21组特征参数,工况3和工况4 分别提取了18 组特征参数,共78 组数据,随机选取46组数据对学习矢量量化网络进行训练,剩余32组数据作为测试样本。
根据输入输出参数数量,输入神经元设置为11,竞争层神经元设置为20,输出层神经元设置为4,每个输出神经元对应一种识别结果。学习矢量量化网络训练的最大迭代次数设置为200,训练误差目标为0.05,学习效率设置为0.001,网络的训练过程,如图6所示。

图6 学习矢量量化网络训练过程Fig.6 Training Process of Learning Vector Quantization Network
从图中可以看出,算法迭代至42次时达到设定的训练目标,训练过程结束,此时的均方误差为0.04938。将32组测试样本输入到训练完毕的网络中,行驶工况的识别结果,如图7所示。从图7中可以看出,32组测试样本的行驶工况全部能够正确识别,没有出现误判情况,说明这里建立的学习矢量量化网络能够准确的识别行驶工况类别,可以为等效因子的自适应变化提供工况依据。

图7 学习矢量量化网络识别结果Fig.7 Recognition Result of Learning Vector Quantization Network
4.3 自适应等效因子
等效燃油消耗最小策略中等效因子的自适应方法是近期的研究热点,最优等效因子不仅与行驶工况有关,而且与电池初始SOC值相关。
当前研究中一般在设定的标准工况或者工况已知的行驶条件下研究最优等效因子设定方法,不符合行驶工况本身复杂多变的特性。这里给出了工况自适应的等效燃油最小策略,等效因子的自适应方法为:
式中:s(t)—自适应等效因子;
s0(t)—通过打靶法离线训练的等效因子初值;
fp(SOC)—针对SOC边界约束的惩罚函数。
首先介绍基于打靶法的最优等效因子离线训练方法。前文中提到,等效因子的设置需满足电池SOC的边界约束,以UDDS、NYCC、NEDC等3种标准工况为例,在初始时刻SOC(t0)= 0.7时,终止时刻SOC与初始时刻SOC的差值ΔSOC=SOC(tf)-SOC(t0)随等效因子的变化曲线,如图8所示。
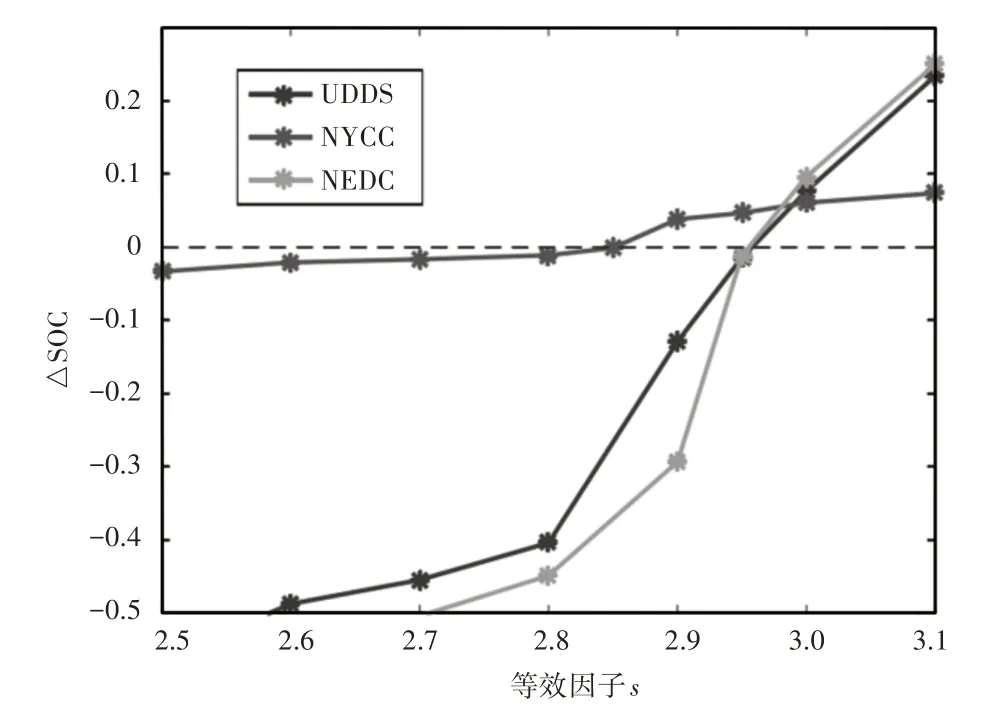
图8 不同工况下等效因子对SOC变化量影响Fig.8 The Influence of Equivalent Factor on SOC Variation
从图中可以看出,在等效因子增大的过程中,ΔSOC由负转正,这是因为当等效因子s(t)较大时倾向于用油,因此终止时刻SOC(tf)>SOC(t0),即ΔSOC>0;当等效因子s(t)较小时倾向于用电,因此终止时刻SOC(tf)<SOC(t0),即ΔSOC<0。
在不同工况不同电池SOC初值下,只有一个等效因子s(t)可以使得ΔSOC= 0,使用打靶法进行离线训练,获得不同行驶工况不同SOC初值下的等效因子,步骤为:
(1)给定一个等效因子初值s0;
(2)在每个控制周期内通过最小化哈密顿函数H(x(t),u(t),t)得到最优控制量u*(t),更新车辆状态进入下一控制周期;
(3)行驶工况结束时,判断ΔSOC=SOC(tf)-SOC(t0)的符号,若ΔSOC>0 则s(t) =s(t- 1) - Δs;若ΔSOC<0 则s(t+ 1) =s(t) + Δs,其中s(0) =s0,Δs>0为打靶步长;
(4)判断是否存在|SOC(tf)-SOC(t0) |<ε,ε为设定的阈值,若否则转至(2);若是则打靶结束,输出对应的最优等效因子sopt=s(t)。
按照上述方法可以得到不同工况下、不同电池SOC初值情况下的等效因子初值s0(t)。
以NYCC 和MANHANTTAN 两种标准工况为例,最优等效因子s0(t)与电池SOC初值的对应关系,如图9所示。
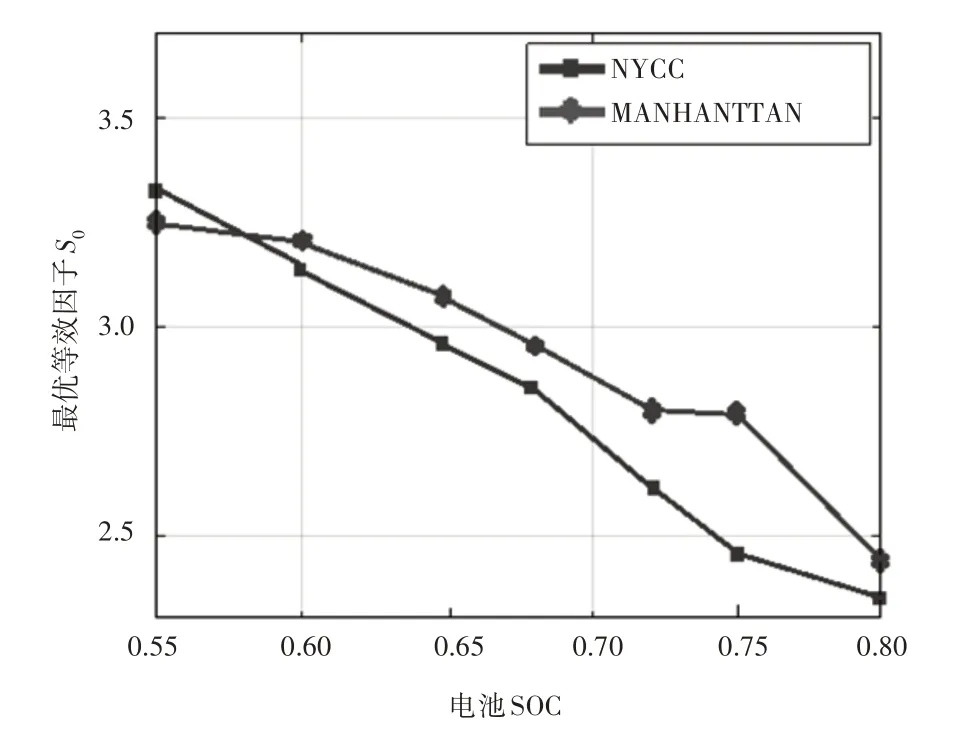
图9 最优等效因子s0(t)Fig.9 Optimal Equivalent Factor s0(t)
由于实际驾驶工况复杂多变,因此有必要在等效因子中加入基于SOC反馈的边界约束惩罚函数fp(SOC),实现对电池SOC的闭环控制,将电池SOC限制在合理范围内。
为了方便表达,记x(t) =SOC(t),这里基于边界约束构造的惩罚函数为:
式中:Kp>0—惩罚函数斜率,a>0—二次函数系数;[xlow.xhigh]—设定的SOC变化区间,Δx=Kp(4a),式(20)中二次项函数的设置是为了实现平滑过渡。分析式(20)可知,当电池SOC接近或超越上边界时,fp(SOC)取负值因此等效因子s(t)减小,此时倾向于用电而使电池SOC减小;当电池SOC接近或超越下边界时,fp(SOC)取正值因此等效因子s(t)增大,此时倾向于用油而使电池SOC增大。
5 仿真验证
5.1 车辆参数
车辆主要参数、性能指标及主要动力系统参数,如表1所示。
5.2 燃油经济性控制结果及分析
为了验证工况自适应等效燃油消耗最小策略的控制效果,使用TestCycle综合工况进行验证,此综合工况由FTP、HWFET、NYCC、US06等4种标准工况组成,时长为7000s,如图10所示。

图10 综合工况Fig.10 Comprehensive Driving Condition
工况识别器对驾驶工况的识别结果,如图11所示。从图中可以看出学习矢量量化网络对驾驶工况的识别准确度极高,在驾驶工况频繁变化位置出现了误判情况,这是因为由于工况频繁变化,同一驾驶工况的维持时间较短,特征提取不足而出现了误判现象。
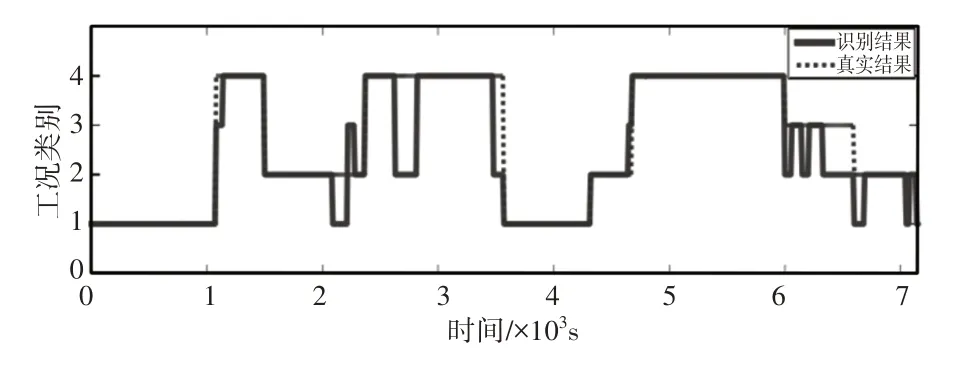
图11 驾驶工况识别结果Fig.11 Driving Condition Recognition Result
等效因子随驾驶工况的自适应变化过程,如图12所示,当电池SOC值保持在设定的范围内时,等效因子保持为常值,当SOC超越设定的变化范围时,等效因子跟随惩罚函数的变化而自适应变化。

图12 自适应等效因子Fig.12 Adaptive Equivalent Factor
发动机工作点分布,如图13所示。从图中可以看出绝大多数发动机工作点均分布在最优经济区域,说明这里提出的等效燃油消耗最小策略可以有效提高发动机效率、减少油耗。
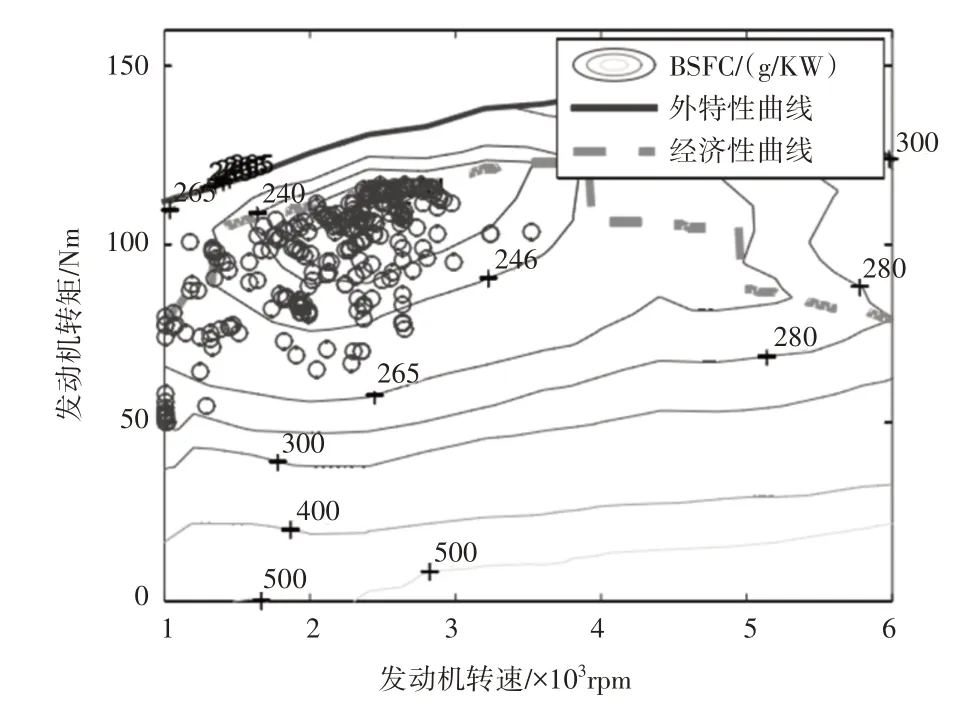
图13 发动机工作点分布Fig.13 Distribution of Engine Working Points
将这里提出的工况自适应等效燃油最小策略与文献[6]提出的智能规则控制、文献[11]提出的模型预测控制策略进行比较,均在图10所示的综合工况下进行仿真,三种控制策略的百公里油耗和等效油耗,如表2所示。
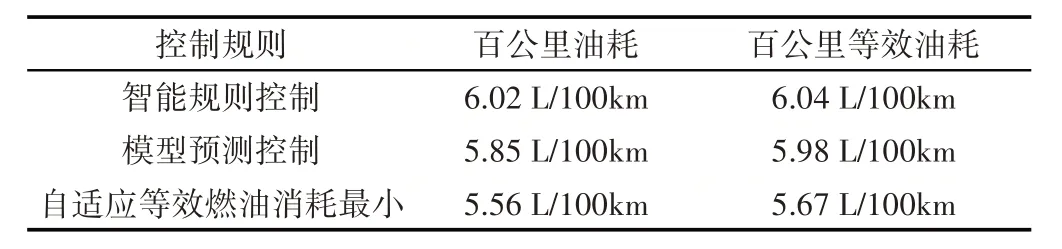
表2 车辆能量消耗Tab.2 Energy Cost of Vehicle
由表2可知,这里提出的自适应等效燃油消耗最小策略的百公里油耗和百公里等效油耗最少,百公里油耗为5.56L/100km,比智能规则控制减少了7.64%,比模型预测控制减少了4.96%。
自适应等效燃油消耗最小策略的百公里等效油耗为5.67L/00km,比智能规则控制减少了6.13%,比模型预测控制减少了5.18%。
这是因为这里提出的等效燃油消耗最小策略实现了等效因子随驾驶工况和电池SOC初值自适应变化,从而实现了发动机高效率工作。
6 结论
这里研究了混合动力汽车的燃油经济性控制问题,使用极小值原理和等效燃油消耗最小策略实现了车辆的燃油经济性控制,为了适应复杂多变的驾驶工况,提出了等效因子随驾驶工况的自适应变化策略,经验证可以看出:
(1)基于学习矢量量化网络的工况识别器具有较高的识别准确度;
(2)工况自适应等效燃油消耗最小策略可以有效减少车辆油耗,实现车辆的燃油经济性控制。
猜你喜欢
意林(2023年7期)2023-06-13 14:18:52
昆钢科技(2022年4期)2022-12-30 11:23:46
小哥白尼(野生动物)(2021年3期)2021-07-21 02:28:38
昆钢科技(2021年6期)2021-03-09 06:10:18
小学科学(学生版)(2019年4期)2019-05-11 09:15:44
四川冶金(2018年1期)2018-09-25 02:39:26
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
汽车维护与修理(2015年6期)2015-02-28 12:17:16
汽车维护与修理(2015年2期)2015-02-28 12:15:44