基于鲁棒反馈控制理论的路径跟踪控制器设计*
2023-07-26 13:33:50沈亚伟赵又群
汽车技术 2023年7期
沈亚伟 赵又群
(南京航空航天大学,南京 210016)
主题词:智能车辆 路径跟踪 线性矩阵不等式 鲁棒控制 李雅普诺夫稳定性
1 前言
随着汽车产业与自动化技术的不断发展,具有自动驾驶功能的智能汽车已成为国内外学者的研究热点。路径跟踪控制作为智能车辆的核心技术之一,旨在通过控制器调整车辆的航向使其完成对目标路径的跟踪。Alipour[1]等人基于滑模鲁棒方法,有效提高了机器人路径跟踪控制系统的抗干扰性。Tagne[2]等人采用高阶超螺旋滑模控制方法使车辆的侧向位移误差趋近收敛,减轻了滑模控制器的抖振现象。Falcone[3]等人设计了基于非线性模型预测控制和线性时变模型预测控制的控制器,并且给出了闭环系统渐进稳定的条件。Wang[4]等人考虑轮胎侧偏刚度的不确定性与外部干扰,提出了基于鲁棒控制的路径跟踪策略,提高了控制器的鲁棒性。Guo[5]等人运用遗传算法优化模糊控制的规则,提高了控制器路径跟踪的精确度和鲁棒性。Zhang[6]等人基于滑模控制提出了一种最优预见线性二次调节器,能够更好地跟踪期望轨迹并合理分配车轮转矩。Barbosa[7]等人提出了一种鲁棒递推调节器,对参数不确定的车辆进行路径跟踪和横向控制。Taghavifar[8]等人提出了一种基于指数型滑模模糊二型神经网络的鲁棒自适应间接控制方法,提高了自动驾驶车辆的路径跟踪性能。郑鑫[9]等人基于李雅普诺夫稳定性理论设计了模型参考自适应路径跟踪控制器,将其转化为线性二次最优控制问题进行求解,控制器具有良好的路径跟踪能力和鲁棒性。王艺[10]和李春[11]等人基于模型预测控制原理提出了一种路径跟踪控制方法,该控制器能够较好地实现路径跟踪。黄海洋[12]等人提出了一种基于多点预瞄最优控制路径跟踪的控制方法,算法具有较高的精确度和实时性。以上路径跟踪控制器设计较为复杂,很少兼顾控制器的精确度与鲁棒性。
针对目前智能车辆路径跟踪精确度和鲁棒性较差的问题,本文基于李雅普诺夫稳定性理论设计一种鲁棒反馈路径跟踪控制器,运用舒尔(Schur)补引理,将控制问题转化为线性矩阵不等式(Linear Matrix Inequality,LMI)问题,运用MATLAB 的LMI 工具箱对问题进行求解。最后,运用CarSim/Simulink 联合仿真平台,对提出的鲁棒反馈控制器的路径跟踪效果进行验证。
2 车辆动力学模型
智能车辆的路径跟踪控制,包括车辆的横摆运动控制和侧向运动控制。在常规工况下使用线性二自由度车辆模型的控制效果与十四自由度模型相当[13],为简化计算,本文采用线性二自由度模型作为车辆动力学模型[14],如图1所示。
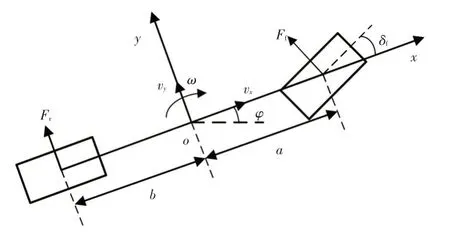
图1 线性二自由度车辆动力学模型
由图1可得车辆二自由度微分方程为:
式中,m为车辆质量;vx、vy分别为车辆的纵向速度和横向速度;ω为车辆的横摆角速度;Cf、Cr分别为车辆前、后轮的侧偏刚度;a、b分别为车辆质心到前、后轴的距离;Iz为车辆质心绕z轴的转动惯量;δf为车辆的前轮转角。
将式(1)写成矩阵形式为:
3 路径跟踪控制器设计
3.1 路径跟踪误差模型
智能车辆跟踪目标路径时,主要考虑车辆的侧向误差和航向误差[15]。如图2所示,车辆质心到参考路径的最短距离为侧向误差ey,车辆实际航向角φ与参考航向角φref之差为航向误差eφ。当航向误差较小时,可得航向误差与侧向速度误差分别为:

图2 路径跟踪误差模型
由参考路径的转弯半径R,可得车辆的参考侧向加速度为:
车辆的实际加速度可表示为:
由式(5)和式(6)可以得到车辆的侧向加速度误差为:
将式(3)、式(4)和式(7)代入式(2),并忽略φref的导数项,可得状态空间方程形式为:
3.2 鲁棒反馈控制器设计
本文基于李雅普诺夫稳定性理论和鲁棒反馈控制理论,设计了路径跟踪控制器,如图3所示,系统输入为车辆的前轮转角δf,鲁棒控制机构根据被控对象的状态与理想模型状态的误差求得反馈控制器K的参数,确保车辆沿目标路径行驶[16]。
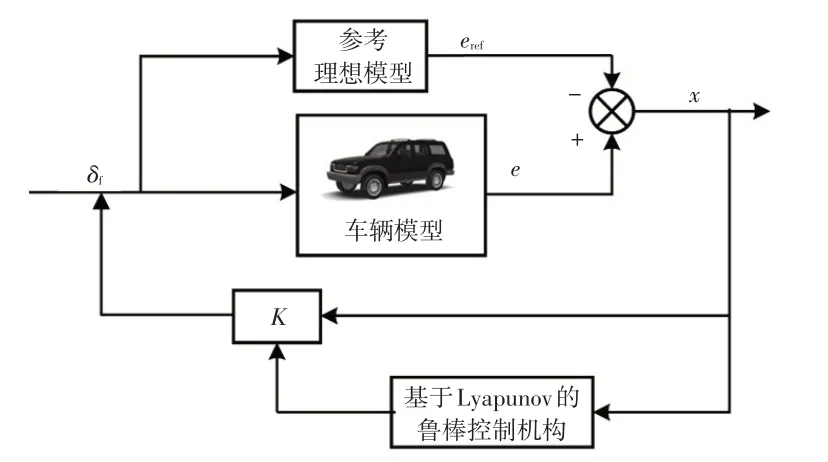
图3 控制系统结构原理
在控制器设计过程中,对式(8)进行近似离散化处理,结果为:
其中,近似离散化后的矩阵变换如下:
式中,T为采样周期;x(k)为k时刻的状态量;u(k)为k时刻的控制量。
路径跟踪控制器的目的是减小车辆的路径跟踪误差。因此,对于式(9)的离散系统,定义其性能指标函数为[17]:
式中,Q、R为目标函数中的权重系数矩阵;K为反馈控制矩阵。
将式(13)代入到式(9)的离散系统可以得到:
基于李雅普诺夫稳定性理论,构建能量函数:
式中,P为对称正定矩阵。
沿着式(14)给出的状态轨迹,对式(15)向前差分可以得到:
式中,ΔV(x(k))为系统(k+1)时刻与k时刻能量函数的差值。
为求解式(16),可令
由李雅普诺夫稳定性理论可知,若式(17)成立,则闭环系统会保持鲁棒渐进稳定状态。
为求解上述不等式方程,将式(13)代入式(17)可得:
对式(18)进行累加求和,由闭环系统的渐进稳定性可知,x(∞)=0,将其代入式(15)可得,V(x(∞))=0,则累加求和结果如下:
式中,x0为x在某一时刻的值。
式(19)中,x0TP-1x0为性能指标函数的一个正数上界。若式(17)成立,则系统满足性能要求。
将式(16)代入式(18)可得:
为求解式(20),运用舒尔补引理如下:
若存在矩阵:
式(22)的左、右两侧均乘以矩阵P,然后运用舒尔补引理,则式(22)的求解等同为:
式(23)中有P和K2个变量。由于矩阵块中存在变量相乘,即式(23)为非线性矩阵不等式,为便于求解,可令Y=KP,对式(23)进行简化。再次运用舒尔补引理可将式(23)等价转化为:
在MATLAB 软件中运用LMI 工具箱求解式(24)的线性矩阵不等式,通过相关指令求得变量P和Y。则系统的状态反馈控制律为:
4 CarSim/Simulink联合仿真与结果分析
本文采用CarSim/Simulink 联合仿真的方法对所提出控制算法的效果进行验证。在MATLAB/Simulink 软件中搭建控制器模型,在CarSim 软件中选取适当的车辆模型,仿真使用的整车参数如表1所示。本文以LQR路径跟踪控制器作为对比,LQR路径跟踪控制器具体见文献[15]和文献[18],本文不再详述。
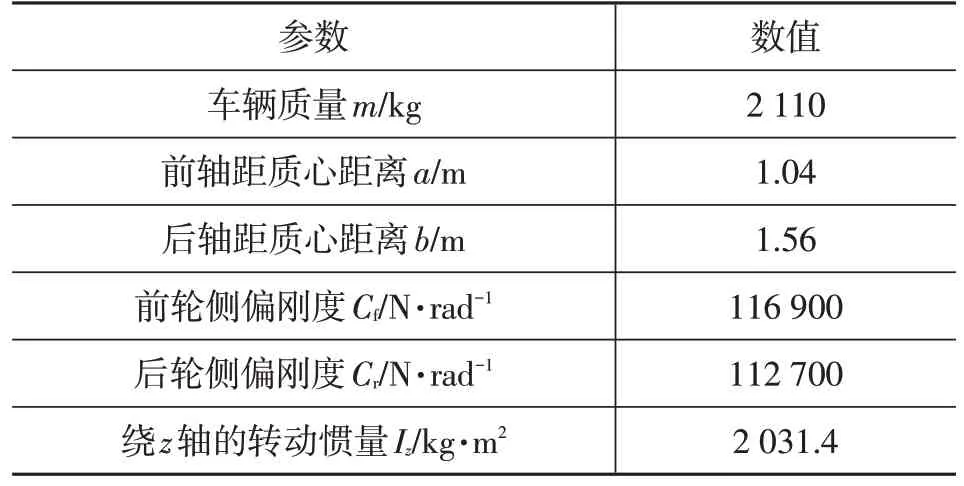
表1 车辆主要参数
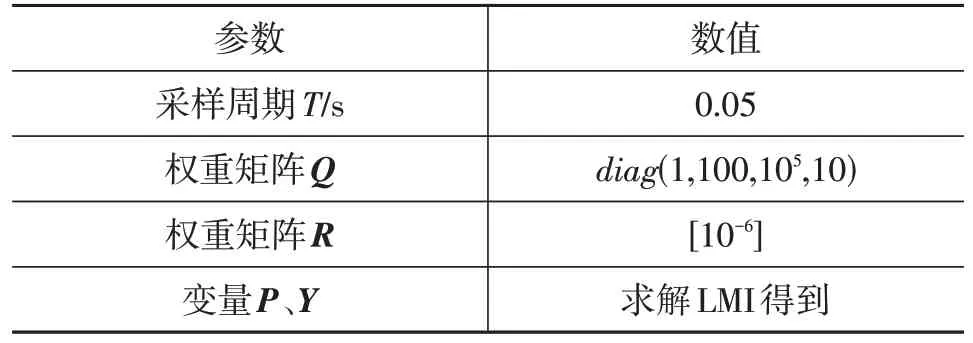
表2 鲁棒控制器参数
本文选取双移线路径作为目标路径[19],如图4所示,对控制器效果进行验证。为了验证路径跟踪控制器的精确度和鲁棒性,本文以LQR 路径跟踪控制器作为对比,仿真过程中分别选取干燥路面(附着系数μ=0.85)和湿滑路面(附着系数μ=0.50),以54 km/h、72 km/h 和90 km/h的行驶速度进行仿真,为验证控制器的鲁棒性,仿真过程中控制器参数保持不变。

图4 双移线参考路径
4.1 高附着路面仿真
智能汽车在路面附着系数为0.85 的干燥路面条件下,分别以3 种车速完成对双移线路径的跟踪,跟踪结果如图5~图8所示。
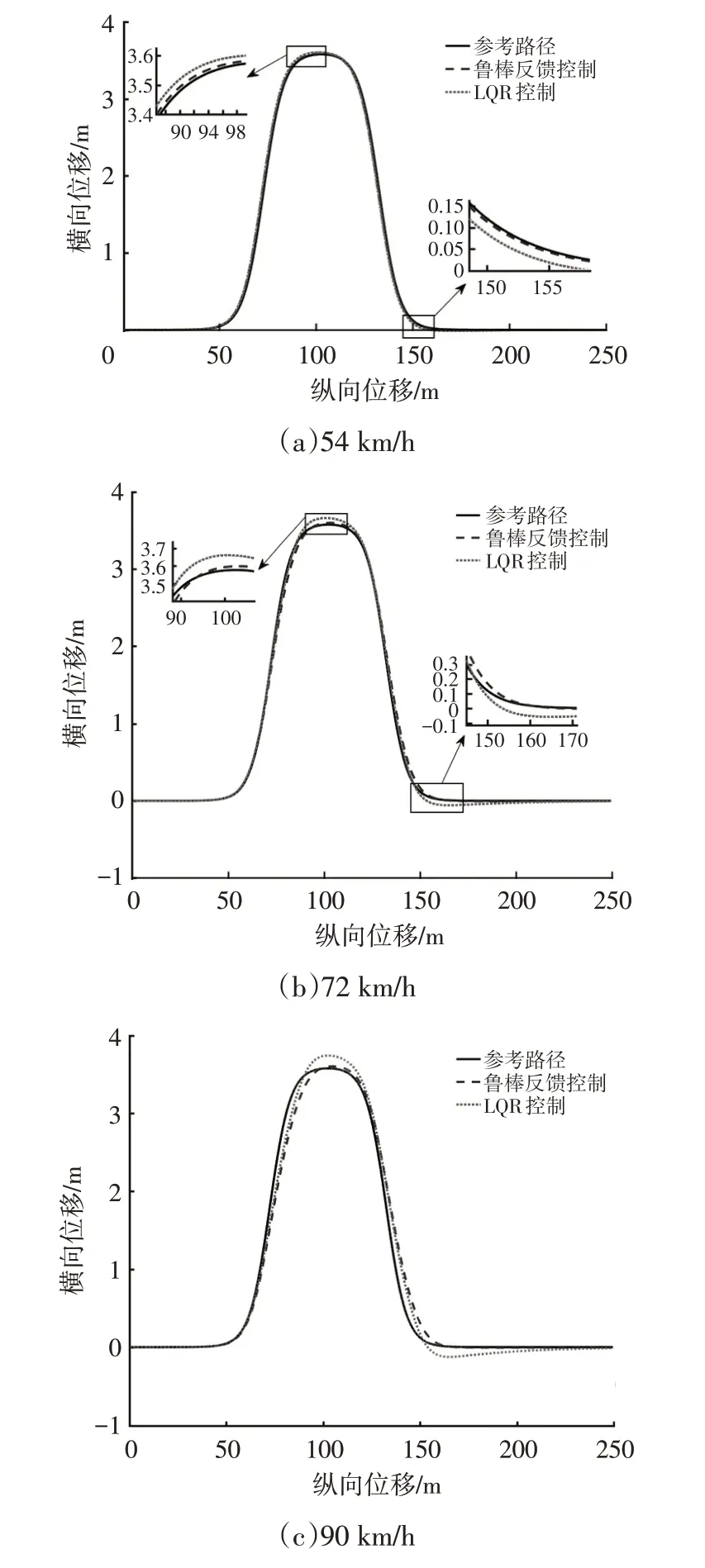
图5 干燥路面不同车速工况下横向位移仿真结果

图6 干燥路面不同车速工况下航向角仿真结果

图7 干燥路面不同车速工况下鲁棒反馈控制横向偏差
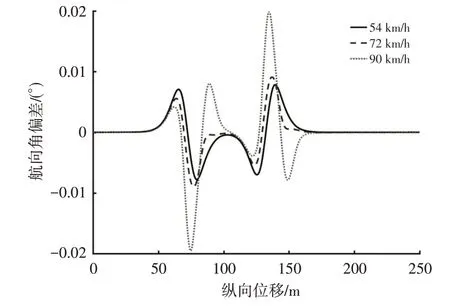
图8 干燥路面不同车速工况下鲁棒反馈控制航向角偏差
由图5a和图6a可知,在低速高附着路面的工况下,鲁棒反馈控制器和LQR控制器均能够使车辆沿目标路径行驶,车辆实际航向角与参考航向角相差较小。由图5b、图5c和图6b、图6c可知,在中高车速、高附着路面工况下,路径跟踪控制器仍能够保证车辆与参考路径有较小的横向偏差和航向角偏差,并且鲁棒反馈控制器对目标路径的跟踪效果好于LQR控制器。图5和图6的仿真结果表明,鲁棒反馈路径跟踪控制器在高附着路面条件下具有很强的鲁棒性。由图7和图8可知,在中低车速下,本文提出的鲁棒反馈控制器能够使路径跟踪的横向偏差和航向角偏差控制在-0.2~0.2 m和-0.01°~0.01°范围内,即使在较高车速下,鲁棒反馈控制器也能够使横向偏差和航向角偏差控制在合理范围内。因此,鲁棒反馈控制器在高附着路面工况下具有很好的精确度和鲁棒性。
4.2 低附着路面仿真
智能汽车在路面附着系数为0.50 的湿滑路面工况下,分别以3 种车速完成对双移线路径的跟踪,路径跟踪结果如图9~图12所示。
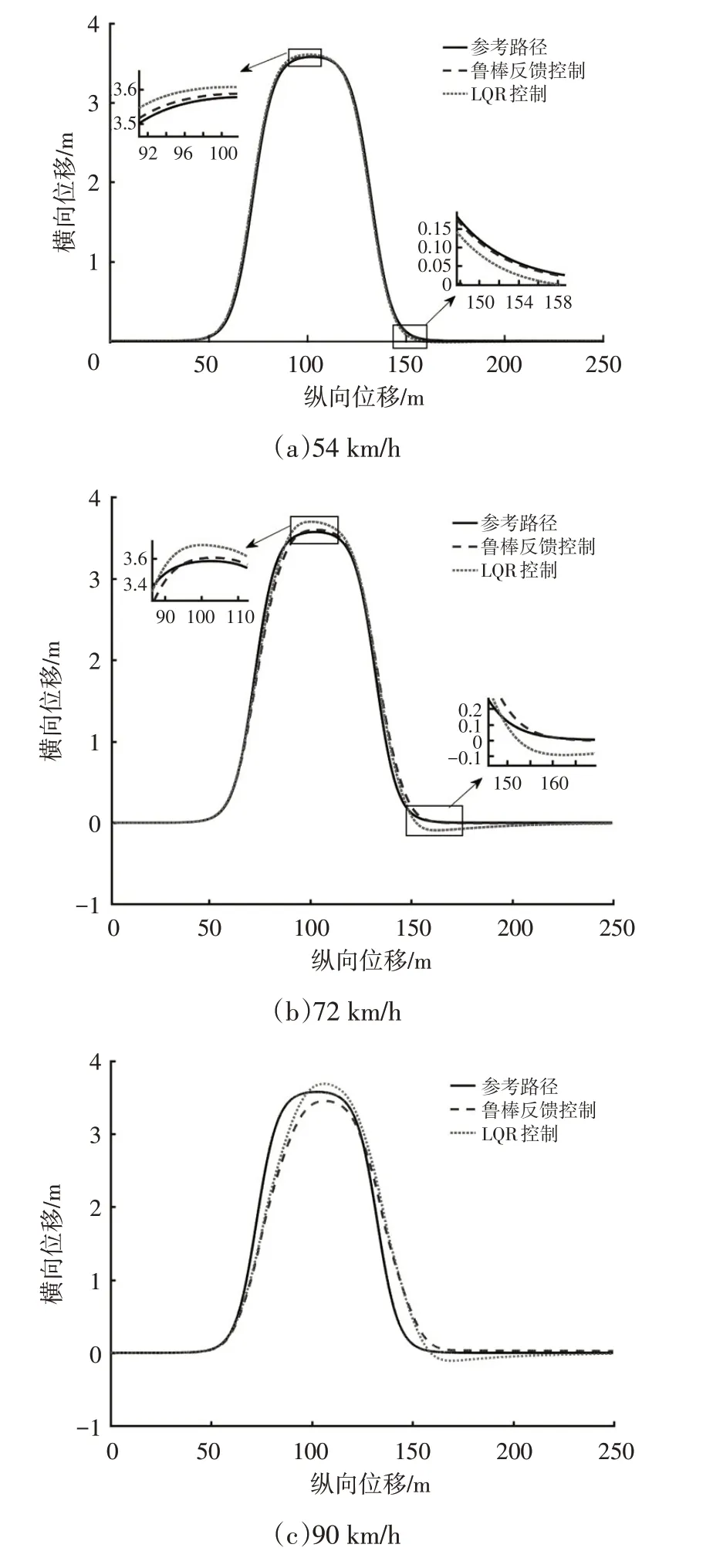
图9 湿滑路面不同车速工况下横向位移仿真结果
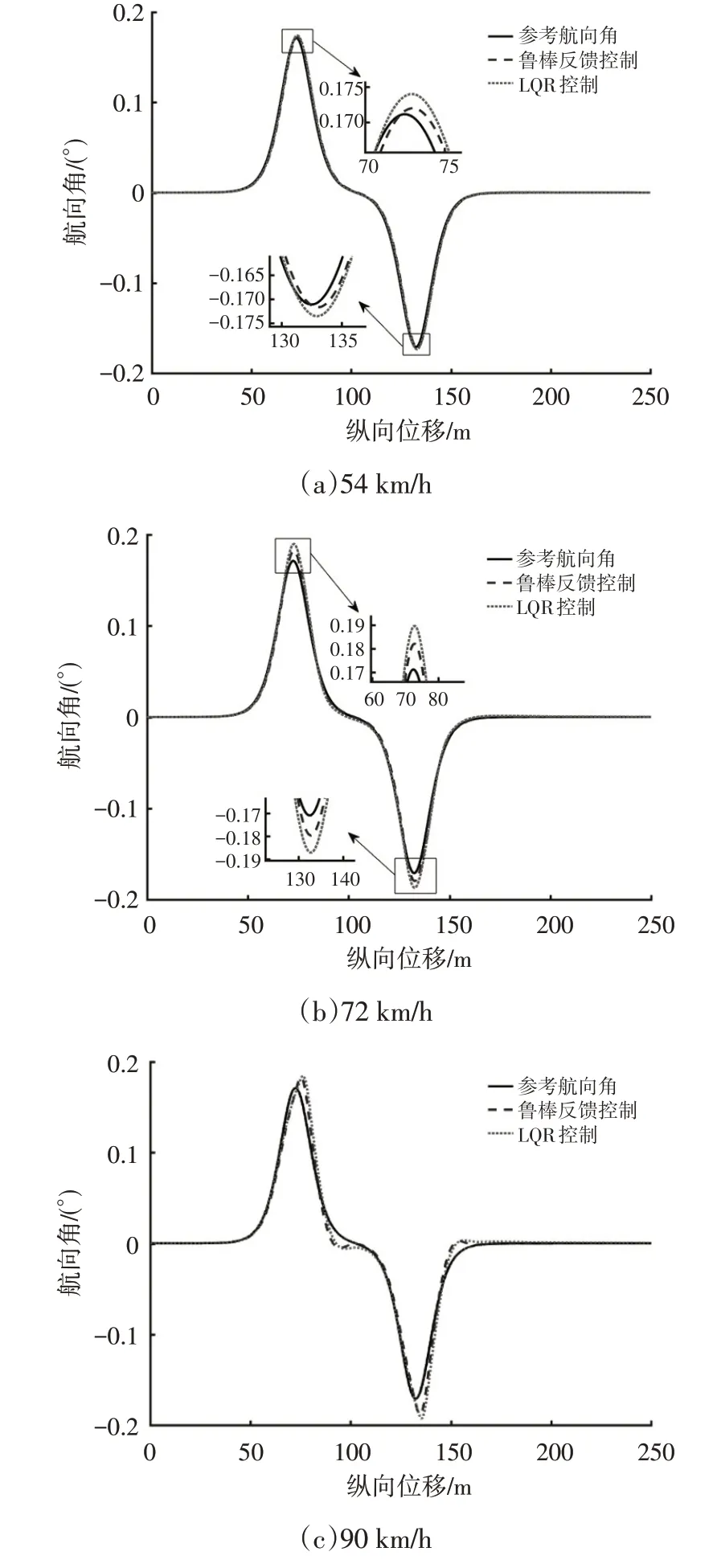
图10 湿滑路面不同车速工况下航向角仿真结果

图11 湿滑路面不同车速工况下鲁棒反馈控制横向偏差
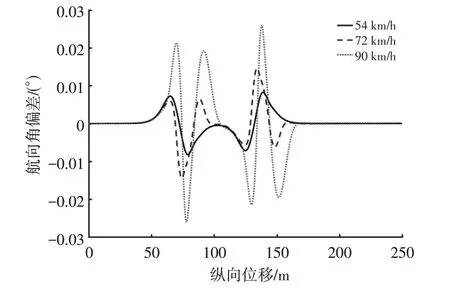
图12 湿滑路面不同车速工况下鲁棒反馈控制航向角偏差
由图9a 和图10a 可知,在低速低附着路面的工况下,鲁棒反馈控制器和LQR 控制器均有很好的控制效果。由图9b和图10b可知,中速低附着路面的工况下,在纵向位移x=100 m 和x=150 m 左右时,鲁棒反馈控制器对目标路径的跟踪效果好于LQR控制器。由图9c和图10c可知,高速低附着路面的工况下,在x=100 m和x=150 m左右时,本文提出的鲁棒反馈控制器仍具有较好的路径跟踪效果,而LQR 控制器则出现了一定程度的超调现象。由图11和图12可知:在中低车速下,鲁棒反馈控制器依然能够将路径跟踪的横向偏差和航向角偏差控制在较小的范围内;在较高车速下,轮胎的侧偏刚度与名义值有较大偏差,因此,路径跟踪的效果较差,路径跟踪的横向偏差和航向角偏差较大。但是与LQR控制器相比,本文提出的鲁棒反馈控制器仍具有很好的精确度和鲁棒性。
5 结束语
本文针对智能车辆的路径跟踪问题,设计了一种基于李雅普诺夫稳定性理论的鲁棒反馈控制器,通过构建李雅普诺夫能量函数不仅保证了闭环系统的鲁棒稳定性,而且使闭环系统满足一定的鲁棒性能。通过搭建汽车动力学模型,运用CarSim/Simulink联合仿真平台将该控制器与LQR控制器的控制效果进行对比分析。仿真结果表明,当外部环境和路况发生变化时,本文提出的鲁棒反馈控制器依然具有良好的稳定性和路径跟踪能力,与LQR控制器相比,鲁棒反馈控制器具有较高的精确度和较强的鲁棒性。对汽车非线性模型进行研究,确保高速低附着路面工况下鲁棒反馈控制系统的精确度和鲁棒性将是本文的后续研究工作。
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
自动化学报(2019年6期)2019-07-23 01:18:18
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
自动化学报(2017年4期)2017-06-15 20:28:54
电子制作(2017年24期)2017-02-02 07:14:16
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:42