基于注意力机制与残差网络的掌纹脊线距离估计
2023-07-21 07:50:14陈亚南许丽娜郝凡昌
计算机技术与发展 2023年7期
张 浩,陈亚南,杨 璐,许丽娜,郝凡昌
(山东建筑大学 计算机科学与技术学院,山东 济南 250101)
0 引 言
掌纹身份鉴别是生物特征识别领域中一个重要的研究问题,在网络空间安全、刑事侦查、司法鉴定等领域有重要的应用价值。相比其他生物特征,掌纹拥有更大的面积以及更为丰富的纹理信息,具有采集成本低廉、用户易于接受、安全稳定性高等优点[1]。掌纹识别的现有研究主要基于手掌上三类纹线:乳突纹、屈肌线和皱褶。如图1所示,乳突纹又被称为脊谷纹线或脊线,通常是平行结构的曲线,脊线的终端点、分叉点等特殊细节结构被称为细节点,掌纹刑侦专家手工进行掌纹识别时,主要把掌纹脊线作为特征的基础生理信息[2-3]。掌纹脊线距离是掌纹脊线的重要纹理属性之一[4],其定义为沿着垂直于脊线的方向连接相邻两条平行脊线中心的线段长度。掌纹平均脊线距离(下文简称脊线距离)是指一定区域内多对脊线间距离的平均值,在某些掌纹识别算法[4-6]与图像质量评估方法[7]中常作为一个重要参数被进行参考。因此,精准地测量掌纹脊线距离对掌纹身份鉴别领域的研究具有重要意义[7]。
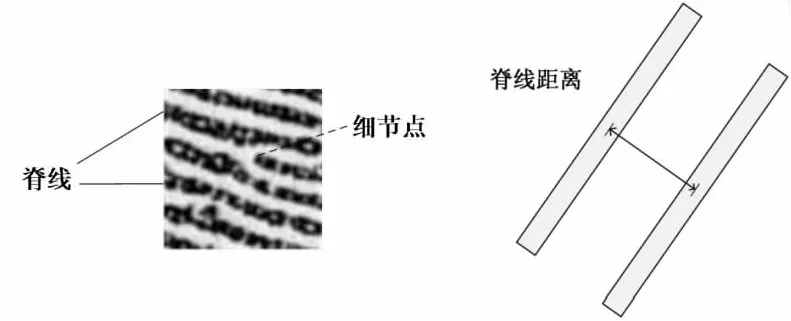
图1 掌纹图像块及相关概念示例
已有的脊线距离的测量方法主要分为两类:频域方法与空域方法。在空域方法中,Zhang等人[8]提出了一种基于脊线搜索与统计窗口的估计方法,在空间域上进行指纹脊线距离的计算。空域方法常应用于指纹脊线距离估计,由于掌纹面积大、皱褶多等特点很少应用于掌纹脊线距离估计,而当前掌纹识别相关工作中多以频域方法进行脊线距离估计。在频域方法中,Jain等人[2]通过离散傅里叶变换与区域生长算法选取频域中合适的强正弦波,通过该正弦波的参数计算掌纹块中的脊线周期,脊线周期的倒数即为脊线距离,并将其作为掌纹匹配中的重要参数。在此基础上,任春晓等人[9]设计了一种指纹图像脊线距离估计算法,通过使用傅里叶变换、平均信息熵和加权欧氏距离等方法计算脊线距离。Hao等人[7]采用频域方法对掌纹图像块进行脊线距离估计,并设计环形掩膜来确定频域内亮峰搜索范围,减少计算与干扰信息,同时将脊线距离作为掌纹质量评估中的重要指标进行参考。但是,常用的频域方法中的区域生长算法需要相对完整的掌纹图像来进行局部领域间脊线距离信息的校正,对掌纹图像的质量要求高,且用于单独较小掌纹块的测量效果并不佳。而频域方法中对掌纹图像块脊线距离估计,并未充分使用图像频域中的相位角等信息,脊线距离估计的精度还需进一步提高。
近些年来,随着深度学习技术的发展,在掌纹识别中越来越多的研究关注到基于深度学习方法从数据中学习掌纹特征。Zhong等人[10]基于深度哈希网络与生物特征图匹配方法,提出了一种融合掌纹和手背静脉的多生物特征算法。2021年,吴碧巧等人[11]提出基于迁移学习的网络模型,实现端到端的高分辨率掌纹图像识别。Liu等人[12]基于注意力的生成对抗网络提出了掌纹方向场恢复模型,使用注意力模块引导网络关注修复区域。在已有研究中,深度学习技术的应用对解决上述掌纹识别与特征提取问题起到了很好的效果。
但现有相关研究并未关注到使用深度学习技术进行脊线距离估计。VGG(Visual Geometry Group)[13]网络作为深度学习中一种经典卷积神经网络,其模型结构简单,可应用性强,网络识别效果明显,综合性能优于一般的典型网络,初步研究发现该网络对于输入尺寸较小的掌纹图像块的处理仍存在网络退化、梯度消失及网络所学习特征不佳等问题。因此,该文引入残差结构与注意力机制,有效解决了上述问题,并对掌纹图像纹理特征中的关键信息进行提取,在提高模型学习能力的同时避免梯度消失。将手工标注获取的脊线距离值按一定值域划分后作为输入掌纹图像块的类别进行识别,并以VGG16网络为基础,提出了一种基于注意力机制与残差结构的脊线距离估计网络。另外,针对手工标注数据集中掌纹图像块脊线距离类别存在的分布不均衡问题,采用数据增强方法削弱类别分布间的不平衡,并设计样本不均衡损失函数,来增强网络对样本数目较少类别的关注,提高模型的泛化能力与识别精度。
1 卷积神经网络与注意力机制
1.1 卷积神经网络
卷积神经网络是深度学习算法中一个重要组成部分,一般由若干个卷积层、池化层和全连接层组成。其中,卷积层用于图像特征的提取,池化层用于对卷积层提取的特征进行抽样,全连接层用于将卷积网络提取的特征连接起来,最后通过多分类器输出对图像的分类预测。VGG是一种经典卷积神经网络,相比AlexNet[14]模型在图像分类任务上取得了更好的效果,VGG模型使用3×3大小的小尺寸卷积核和2×2大小的池化层构造深度更深的卷积神经网络,其网络结构设计方法为构建深度卷积神经网络提供了方向。一方面,通过3×3小卷积核的堆叠使用来获取更大的感受野,减少网络参数,且在文中工作中较大感受野的选取,可以考察到多对相邻脊线间的距离信息,从而使模型关注的信息更加全面。另一方面,卷积层中ReLU激活函数与全连接层中Dropout函数的使用增加了网络中的非线性映射,增强网络的泛化能力,从而能够关注解决脊线分叉、涡形变化等多种局部细微变化带来的差异问题。
VGG16模型由13层卷积和3层全连接层组成,模型结构简单、可应用性强,但是对于输入尺寸较小且结构简单的掌纹图像块,网络退化现象仍比较明显,考虑到残差网络对于解决网络退化与梯度消失问题具有不错的效果,对此以VGG16网络为基础引入恰当的残差结构来改善上述问题,同时亦改进保持了网络的轻量化。
1.2 网络注意力机制
为使模型更加有效地关注到脊线结构信息,并对掌纹脊线距离进行更加精准的测量估计,该文在模型设计中引入注意力机制。计算机视觉中的注意力机制借鉴了人类视觉的注意力思维方式,学习获取重点关注的目标,从而在大量无关背景区域中筛选出具有重要价值信息的目标区域,帮助人类更加高效地处理视觉信息[15]。注意力机制的核心思想为基于原有数据中内容的关联性来突出数据中的重要特征,常见的注意力机制有通道注意力、空间注意力、多阶注意力等。在实现上,注意力机制通过神经网络的学习生成与输入特征通道或空间维度大小相同的掩码矩阵,以此表示输入特征所需网络关注的得分,两者对应维度相乘后输入特征中更重要的信息将获得更大权重,来提高网络对输入特征中重要区域关注程度。CBAM(Convolutional Block Attention Module)注意力机制[16]由通道注意力机制与空间注意力机制串联而成,总体结构如图2所示。

图2 CBAM注意力机制总体结构
通道注意力机制模块如图3所示,具体实现过程为:将C×H×W大小的输入特征图经全局平均池化和全局最大池化分别生成两个C×1×1大小的特征图GAP与GMP,经过两层共享权值的神经网络,为了减少网络参数,第一层神经元个数为C/r,r为缩减比率,在文中方法中r设置为16,激活函数为ReLU,第二层神经元个数为C,由此得到两组C×1×1大小的中间特征图GAP'与GMP';两组特征图在对应维度相加后,经过Sigmoid激活函数得到通道注意力特征图;而后,将通道注意力特征图和输入特征图进行乘法操作,由此对输入特征图进行注意力叠加,生成空间注意力机制模块需要的输入特征。

图3 通道注意力模块结构
空间注意力机制模块如图4所示,具体实现过程为:将上一模块输出的特征图作为输入特征图,并在通道层次上进行全局平均池化和全局最大池化生成两个1×H×W大小的特征图GAP与GMP,并将其拼接为2×H×W大小的特征图,以此共享同一网络;而后,经过一层7×7卷积操作,降维为1×H×W大小,再经过Sigmoid激活函数得到空间注意力特征图;最后,将空间注意力特征图和输入特征图进行乘法操作,得到最终经先后叠加通道注意力与空间注意力的输出特征图。

图4 空间注意力模块结构
与其他注意力机制相比,CBAM注意力机制同时叠加了通道注意力与空间注意力两种不同机制,所生成的注意力特征内容更加丰富,使得原有通道间的信息交互与空间内的信息交互联系更加密切。同时,两种注意力机制均通过使用全局平均池化和全局最大池化操作来分别生成输入特征的全局和局部信息,以此在各注意力机制内同时关注输入特征的局部与全局特征生成注意力网络掩码,使得网络参考信息的范围更全面。对于主要由线条构成的掌纹图像块,CBAM注意力机制可使模型更加有效地关注到其结构信息,从而对掌纹脊线距离进行更加精准的测量估计,由此选取该注意力机制对模型进行改进。
2 基于样本不均衡损失函数的残差网络
2.1 嵌入CBAM的残差网络
该文将裁剪后的64×64像素大小的掌纹图像块作为输入,可更精细化计算原掌纹图像的脊线距离分布,且对该尺寸的掌纹图像块进行标注,标注准确性高。由于输入图像尺寸较小,选用VGG16网络作为基础网络具有更好的适用性。对网络有机加入CBAM注意力模块,可提高网络对特征空间中重要纹理特征的关注程度,且能够增强网络中间层的特征表达,提高网络的学习能力。同时,为有效避免模型存在的梯度消失问题,对网络改进添加残差结构与批量归一化(BN)层。设计实现两种残差子模块,如图5所示。由于CBAM模块中空间注意力机制使用7×7大小的卷积核来提取空间内多条脊线间的局部相关性,因此嵌入CBAM的残差子模块应用于网络前端,使模型着重关注输入图像块中的关键纹理特征,而普通残差子模块应用于网络后端,且在同一子模块内卷积层的输出通道数设置相同。

图5 Residual-CBAM-Block注意力残差模块与普通Residual-Block残差模块
引入残差机制与注意力模块的VGG16网络结构如图6所示,网络流程如下:首先,为拓展网络输入通道信息及增加初始卷积计算,将输入的掌纹灰度图像块预处理为3通道,且经实验验证图像通道设置为3,网络性能更佳。而后,输入图像经过2次嵌入CBAM的残差模块,并且每次输出进行最大池化操作,再经过3次普通残差模块,同样每次输出进行最大池化操作,此时输出特征图大小为512×2×2。而后,将上述输出特征图输入通道注意力模块(CAM)计算叠加其通道注意力,特征图展平后输入全连接层模块,经过2层全连接层FC-2048输出特征。最后,经过类别输出全连接层FC与Softmax输出对各个类别的预测概率。

图6 引入残差机制与CBAM注意力模块的Vgg16-CBAM-Residual网络
2.2 样本不均衡损失函数
在深度学习中,若训练数据不均衡,会使模型更偏向于数目较多的样本,而数量较少的样本类别得不到有效的关注,从而影响模型的泛化能力与识别精度。因此,只有训练数据分布均衡,才能避免训练模型产生严重的偏向性,以此加强模型泛化能力与识别精度。所用的数据集是随机选取手工标注,而手掌各局部区域的脊线距离值多分布于9至12像素间[7],如图7所示,标注数据集合由此存在类别分布不均衡问题。

图7 标注数据集脊线距离值分布
通过数据增强与设置样本不均衡下的分类损失函数来解决标注数据集中存在的分布不均衡问题。在后文中,将具体介绍通过增广类别与数据增广来增强及均衡化训练数据。在损失函数设置上,图像识别中常用多分类交叉熵损失函数,公式如下:
(1)
其中,N为样本数目,M为类别数目,yic为符号函数,若样本i的真实类别为c,取1,否则取0,pic为观测样本i属于c的预测概率。
类别分布的不平衡可归结为难易样本分布的不平衡[17],为使模型更加关注难分样本,相对减少关注易分样本,对此将交叉熵损失函数修改设置为:
(2)
但是由于标注误差与样本中离群点的存在,导致上述目标函数会使模型过于关注极难分样本,影响模型泛化能力。而难易样本分布的不平衡可进一步归结为梯度分布的不平衡[18],梯度分布计算公式如下:
(3)
其中,
(4)
(5)

(6)
通俗来讲,GD(g)即是以梯度g为中心,宽度为ε区域内的样本密度。
设置梯度划分范围后,由统计的初始样本预测概率值所在梯度分布,得知易分样本与难分样本所在梯度模长较大,而使模型更加关注两者之间的普通样本,可更有效地提升模型的泛化能力,对此该文改进的目标函数公式如下:
(7)
该目标函数融合了两种样本不均衡损失函数思想,使得样本所在的梯度密度在模型训练前期起主导作用,使模型更加关注普通样本,并避免对过难样本的关注。而在训练后期,随着模型精度的提高,样本梯度gi普遍减小,样本梯度密度更加集中,梯度密度无法发挥有效的作用,而此时L_Focali中设置的难易权重可相对更有效地发挥作用。在文中工作中,目标函数的设置可使模型在训练过程中更加关注样本数目较少的类别,同时更加关注普通样本的识别正确率,减少样本类别不均衡对模型训练的影响。
3 实 验
3.1 数据集
该文使用的掌纹图像来自两个包含全掌纹和现场掌纹的开放数据库,即现场掌纹识别数据库(LPIDB v1.0)[19]和清华大学高分辨率掌纹数据库(THU-HRPD)[4-5]。LPIDB v1.0包含两种模式的掌纹图像。一种模式包括在受控环境中直接从物体扫描出的完整掌印,而另一种模式包括用黑色粉末和胶带从模拟的无法控制的犯罪现场所提取的现场掌纹。该数据库图像来自51个人的102个不同手掌的102个全掌纹和380个现场掌纹数据。LPIDB v1.0图像均为8位灰度图像,分辨率为500 DPI(Dots Per Inch),其中,全掌纹图像的大小约为2 000×2 000像素,而现场掌纹图像大小的范围在大约150×200像素到2 000×800像素之间。THU-HRPD图像数据由商用掌纹扫描仪拍摄采集,包含来自80个人的160个不同手掌,每个手掌对应有8幅全掌纹图像,实验数据仅从中取一幅图像,所有图像均来自非重复手掌。THU-HRPD的160幅图像中,均为500 DPI,大小为2 040×2 040像素,其中,有24幅是JPG格式的RGB彩色图像,其余是位深度为8的JPG格式的灰度图像。
该文选取上述数据库中的图像来标注创建掌纹脊线距离数据集,具体实现过程为:将掌纹图像裁剪为64×64大小的非重叠图像块,作为待标注数据集,并从中随机选取图像清晰且来自尽量多不同手掌、不同区域的图像块进行手工标注。如图8所示,标注采用选取平行线条标点并计算两点间距离方式,以像素为单位计算脊线距离。在掌纹图像块内取不同区域的多对脊线进行标注计算,取平均值的整数表示该图像块的平均脊线距离,并将其写入图像块的文件名中作为标签使用。
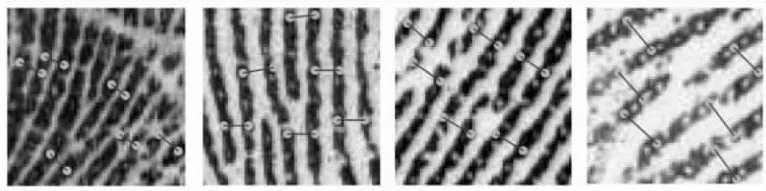
图8 掌纹脊线距离标注过程效果
该文标注图像数量为651幅,并将上述手工标注计算的脊线距离值作为图像的样本类别。由于部分类别图像数目太少、类别分布不平衡、标注存在误差等情况,原标注类别间存在一定的重叠部分且即便是专家手工标注也不易设定严格的界限,以此采用增广类别的方式改善类别分布,将脊线距离为6、7像素合并为“7像素邻域”类别,脊线距离为9、10、11像素合并为“10像素邻域”类别,脊线距离为12、13像素合并为“12像素邻域”类别,脊线距离为14、15、16像素合并为“14像素邻域”类别,类别数目缩小为5个。增广类别后,为确保样本类别分布均衡,依据类别内所含的样本数目,通过高斯滤波、中值滤波及添加噪声等方式进行不同程度的数据增广,对样本数目少的类别进行最大程度的数据增广,样本数目相对多的类别只选取添加噪声的方式进行数据增广或不进行数据增广。数据增广后的数据集包含1 441幅图像,且极大改善了原始标注数据中样本分布不均衡问题,如图9所示。
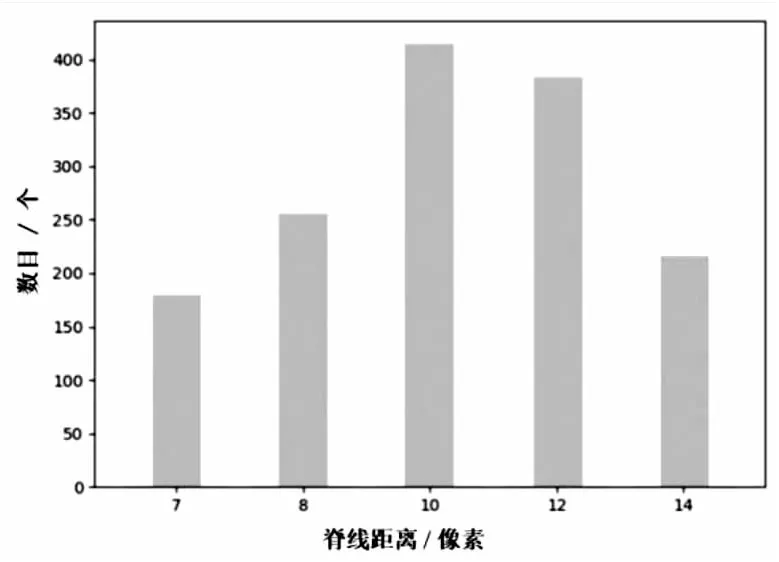
图9 数据增广与类别合并后1 441幅图像脊线距离值分布
3.2 实验设置
实验均在Python 3.6.9环境下进行编写,实现框架采用Pytorch。实验将数据增强后的64×64像素大小的图像作为输入,共1 441幅图像。其中,1 020幅图像作为训练集,431幅图像作为验证集。网络共迭代200轮,选用自适应矩估计(Adam)优化器,初始学习率为0.002,迭代40轮后,网络每迭代40 轮,学习率衰减为现学习率的0.6倍,批次大小设为 128。上述常数均按照经验值进行设定。采用准确率Accuracy作为实验的评价指标,公式为:
(8)
其中,TP为将正样本预测正确的数目,TN为将负样本预测正确的数目,P为正样本数目,N为负样本数目。
3.3 实验结果与分析
为了验证文中方法的效果,进行了三组实验,分别为:传统频域方法对比实验、消融对比实验、深度学习方法对比实验。
传统掌纹脊线距离估计方法主要是通过在频域中选取合适的强正弦波参数来计算局部掌纹图像块中的脊线距离,且传统方法常作为辅助工作进行介绍,未进行系统性详细研究。由此,在与传统频域方法对比实验中,选取文献[7]中最新改进的对掌纹图像块的脊线距离估计频域方法进行实验对比,结果如表1所示。结果上看,文中方法(Vgg16-CBAM-Residual)相比传统频域方法准确率有较大提升,表明通过文中方法能够有效学习获取掌纹图像块脊线距离特征,同时传统频域方法对掌纹图像块脊线距离的估计精确度存在一定局限性,深度学习对掌纹纹理特征的学习具有一定的应用价值。

表1 频域方法实验对比结果
为了验证文中注意力机制、残差结构以及样本不均衡损失函数设置的有效性,进行了消融实验。在实验设置相同的条件下,设置三类方法:VGG16网络加入CBAM注意力机制(Vgg16-CBAM)、VGG16网络加入残差结构(Vgg16-Residual)以及文中方法(Vgg16-CBAM-Residual),分别在四种不同损失函数下进行实验对比,结果如表2所示。

表2 消融实验对比结果
消融实验结果显示,文中方法将CBAM注意力机制与残差结构同时加入网络能够起到更好的效果。一方面,这是因为CBAM注意力机制在网络前端的加入增强了模型对掌纹图像块在通道与空间层次中关键纹理信息与细粒度信息的学习,同时在网络后端的通道注意力机制进一步增强了对当前特征图中重要通道信息的关注。另一方面,由于输入掌纹图像块较小,残差结构的加入,在增加模型网络深度的同时,解决了梯度消失问题,同时增强了模型对掌纹图像中脊线结构信息的学习。在损失函数设置方面,所提出的损失函数效果优于现有其他损失函数,表明提出的基于样本难分程度与梯度密度的样本不均衡损失函数,在模型训练学习的不同阶段,能够更加有效地关注到少样本类别与难分样本,减少样本不均衡对模型所带来的影响。
在与不同深度学习网络的对比实验中,选取VGG16、Resnet-34(Residual Network)[20]、Densenet-161(Densely Connected Convolutional Networks)[21]三种经典深度学习网络模型在相同实验设置下进行对比,并使用以上三种网络模型在参考文献中的默认参数设置进行实验。如表3所示,所提出的方法效果最佳,这进一步表明,以VGG16网络为基础模型进行改进添加的注意力机制与残差结构,能够使模型更有效地学习掌纹图像块中脊线距离特征信息。同时,模型所设置的样本不均衡损失函数能更加关注到训练过程中的难分样本,以此提高模型的泛化力。相较于其他残差网络,改进的网络模型虽参数量较多,但模型整体性能表现更好。

表3 深度学习方法实验对比结果
4 结束语
该文提出了一种基于注意力机制与残差网络的掌纹脊线距离估计方法。该方法基于VGG16网络进行改进,为网络添加残差结构与CBAM注意力机制,增强网络对图像纹理特征中关键信息的提取,提高模型学习能力,且避免梯度消失。同时,设计基于样本难分程度与梯度密度的样本不均衡损失函数,增强网络对样本数目较少类别的关注,提高模型的泛化能力与识别精度。所用数据集由手工标注完成,并采用数据增强方式削弱减少类别分布不均衡问题。在该数据集上,文中方法与其他深度学习网络相比脊线距离估计效果更佳,与传统频域方法相比脊线距离估计准确率提升明显,且对深度学习在纹理图像特征提取方面的应用具有一定借鉴意义。文中方法在脊线距离估计精度上有提升,但数据集仍存在一定标注误差且文中方法对脊线距离估计的细分程度还仍需提高,未来研究可更加关注掌纹图像脊线距离标注信息的完善以及脊线距离估计精确程度的进一步提高。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
自动化学报(2019年6期)2019-07-23 01:18:32
测控技术(2018年2期)2018-12-09 09:00:34
中学生百科·小文艺(2017年9期)2018-02-05 16:29:55
红岩(2017年6期)2017-11-28 09:32:46
河南科技(2015年8期)2015-03-11 16:23:52
地理与地理信息科学(2015年6期)2015-02-10 02:26:00
中国中医药现代远程教育(2014年11期)2014-08-08 13:23:44
中国测试(2013年3期)2013-07-12 12:14:02