
高光谱观测卫星高精时间同步方案设计与应用
2023-07-13 11:28张苗苗张丹丹李迎杰王凤阳李云端
海军航空大学学报 2023年3期
温 渊,张苗苗,张丹丹,李迎杰,王凤阳,李云端
(上海卫星工程研究所,上海 201109)
0 引言
高光谱遥感技术具有观测通道多、光谱分辨率高等特点,是遥感技术的重要发展方向[1-2]。高光谱遥感技术已经被广泛应用于环境综合监测、地矿调查、大气成分探测等诸多领域[3-10]。高光谱观测卫星(GF-5)卫星是我国第1 颗高光谱综合观测卫星,设计运行于太阳同步轨道,轨道高度705 km,主要用于获取从紫外到长波红外谱段的高光谱分辨率遥感数据产品,是我国高分专项的重要组成部分,是体现国家高光谱分辨率对地观测能力的重要标志[11-12]。
GF-5配置了可见短波红外高光谱相机、全谱段光谱成像仪、大气环境红外甚高光谱分辨率探测仪、大气主要温室气体监测仪、大气痕量气体差分吸收光谱仪和大气气溶胶多角度偏振探测仪。这6 台载荷,具有高光谱、太阳掩星、耀斑观测、红外、偏振、多角度等多种观测手段[13]。
为满足卫星高精度姿态控制、有效载荷高图像定位精度和配准精度等需求,要求卫星具有高精度时间同步精度[14-15]。本文设计了适用于GF-5的高精度时间同步系统方案,综合通过星地时差集中校时、GPS 总线校时、GPS秒脉冲校时、校匀校时、总线广播授时等多种校时方案,同时适应一般精度需求和高精度时间同步应用需求。针对星敏感器、可见短波红外高光谱相机及全谱段光谱成像仪这3类对曝光时刻时间同步精度要求最高的远程终端,设计了3 种高精度时间同步方案,并利用在轨遥测数据进行验证。
1 卫星时间同步总体方案
数管计算机(Central Terminal Unit,CTU)的时间是整星的系统时钟,卫星的姿态数据、遥感数据、广播消息和广播时间等均采用系统时间进行描述。系统时间采用UTC 时间基准,以48 位0.1 ms 累计数作为星上的计时方式,数管周期性通过1553B总线将当前系统时钟广播给各终端(Remote Terminal,RT)用户使用。
为了获得高精度的秒内时间精度和高稳定的时钟周期,数管计算机采用高稳恒温晶振触发产生16位长度、分辨率为0.1 ms的时钟计数供软件读取。数管每一节拍开始时,通过读取该时钟计数,与上一节拍读取的计数值获取差值ΔT,累加到系统软件时钟上。数管通过1553B总线进行广播的频率为1 Hz,在广播前,提前把广播产生的时延量进行扣除。1553B总线时间广播的准确度受软件处理时延和总线通信传输时延估算精度和稳定度的影响,仅用广播时间进行校时的用户存在ms级的误差。
时间误差将会对星敏感器的姿态测量和高分辨率相机的图像定位带来影响。表1给出不同时间精度对星敏感器及高分辨率相机的影响分析。可看出:对于星敏感器,当时间误差在5 ms 以内时,星敏的指向误差约小于1″,可以满足姿态解算需求;对于高分辨率相机,当时间误差在5 ms 左右时,对定位造成的误差就达37.5 m,远不能满足高分辨率图像定位的要求。
我国现有的常规遥感卫星校时方案中:针对时间精度需求在ms 级的一般精度需求的终端,通过数管1553B 广播等手段进行时间同步[16];针对时间精度需求在μs 级的终端(如高分辨率相机),可通过高精度时间基准单元进行高精度时间同步[17]。GF-5 同时存在了多种一般精度需求的终端及多种高精度需求的终端,为了简化系统的设计,区别于其他高分辨率遥感卫星,在不引入额外的时间基准单元的情况下:对于一般精度需求的终端,仅采用1553B广播同步的时统方案;对于高精度需求的终端,设计通过数管广播结合GPS秒脉冲的时统方案,以满足高精度时间同步需求[18]。GF-5时间同步架构示意图如图1所示。
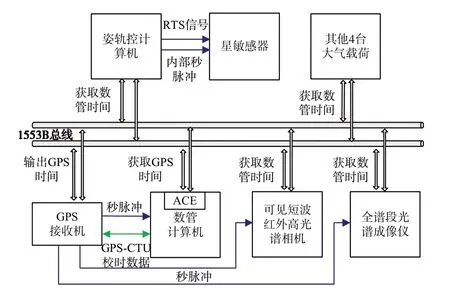
图1 GF-5时间同步架构示意图Fig.1 Time synchronization framework of GF-5
各终端用户根据自身需求,通过数管广播获取1553B接收时刻的时间,根据不同的精度需求,通过内部的计数器等获取进一步细化终端时间。对于终端分系统下位机以外的其他单机,可以采用内部秒脉冲等校时方式,如星敏感器由于没有直接连接到1553B总线上,设计通过内部秒脉冲与姿轨控计算机进行时间同步,以避免姿轨控计算机至星敏感器之间再引入更大的时间误差。已知秒脉冲本身的时间精度优于1 μs,对时间精度要求较高的可见短波红外高光谱相机及全谱段光谱成像仪设计采用GPS 秒脉冲进行时间同步,通过1553B 获取整秒时间,通过内部计数器结合秒脉冲信号获取秒内时间。
2 具有多级故障重构功能的系统校时方案
数管计算机时间是整星时间的基准,其时间精度直接影响整星各终端的时间。数管计算机虽然采用了高稳恒温晶振,但其精度和稳定度仍有限,长期积累也会发生时钟漂移。为此,卫星设计采用软件时钟,通过具有多级故障重构功能的校时方案进行校时,优先级从高到低依次为GPS 秒脉冲校时、GPS 总线校时、高稳晶振均匀校时、CPU 计时器均匀校时及软钟校时等,确保在GPS秒脉冲故障、GPS通信故障、高稳晶振故障、CPU 计时器故障等情况下,卫星系统时钟误差仍可控。为了进一步提高可靠性,系统时钟在内存中同时维护3份。
2.1 GPS秒脉冲校时
GPS 接收机每1 s 通过RS422 输出脉冲宽度为1 ms 的秒脉冲信号,信号形式为宽度1 ms 的负脉冲,时间精度可达1 μs。CTU 在接收到GPS 秒脉冲信号后,自动锁存时钟计数器的值,软件周期性计算对应GPS 秒脉冲时刻的数管系统时间,通过取模运算(Mod)获取整秒的余数,即与整秒的偏差值,用其修正本地时钟。数管GPS秒脉冲校时的流程如图2所示。
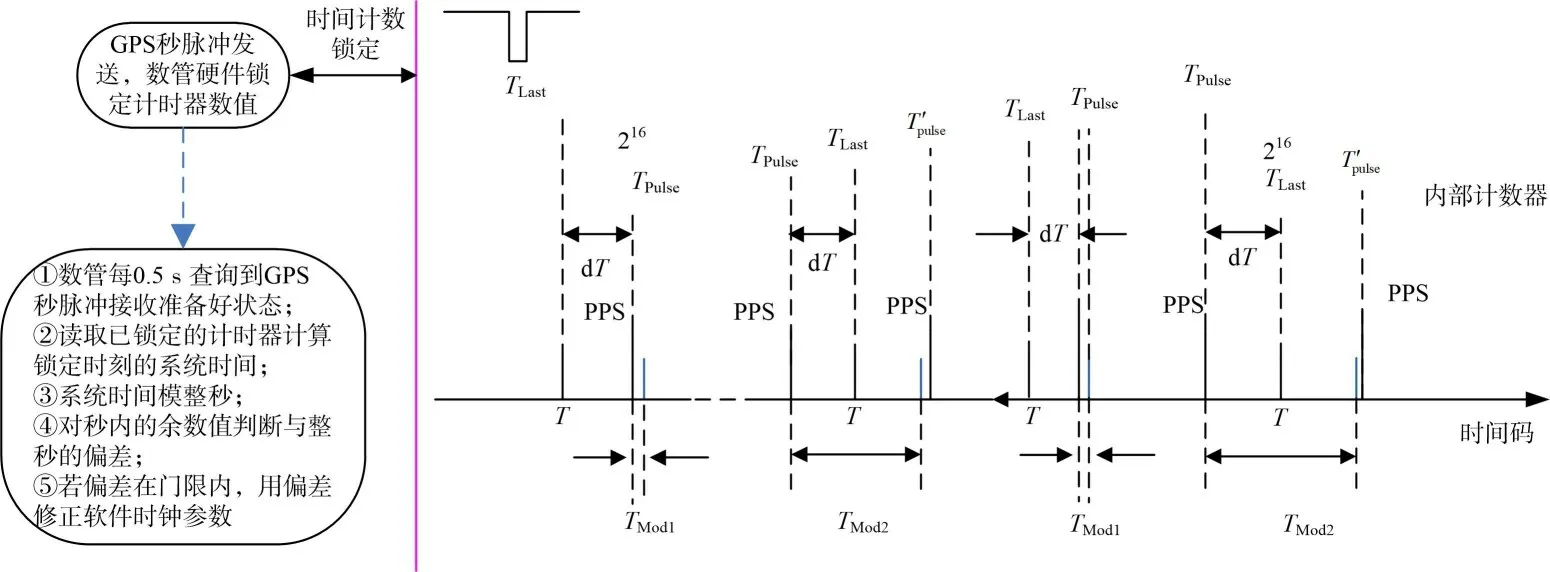
图2 CTU秒脉冲校时流程图Fig.2 CTU pulse per second time adjusting scheme
实际应用中,需要考虑到16 位内部计数器的进位,采用规范化处理的公式计算数管时间到秒脉冲时刻的间隔dT,计算公式如式(1)所示:
式(1)中:TPulse为秒脉冲时刻锁存计数值;TLast为上一次数管时间;mod(⋅)为求余运算。
数管递推到秒脉冲时刻在秒内的偏差TMod可由mod(T+dT,10 000 )计算。但由于MOD 公式的特性,计算得到的TMod结果在数值上可能为靠近0 的正数(图2 所示的TMod1),或者为在数值上接近但小于10 000的数(图2所示的TMod2),须对2种情况进行规范化处理,计算公式如式(2)所示:
结合式(1)(2),得到有修正系统时间T的计算公式:
图2 中:dT为数管时间到秒脉冲时刻的间隔;TPulse为秒脉冲时刻锁存计数值;TLast为上一次数管时间;TMod为数管递推到秒脉冲时刻的整秒偏差,修正后系统时间T=T-TMod。
通过对在轨的遥测数据进行分析可知,在轨秒脉冲时差测量受限于时钟量化精度为0.1 ms,误差稳定在±0.1 ms 以内,如图3所示。
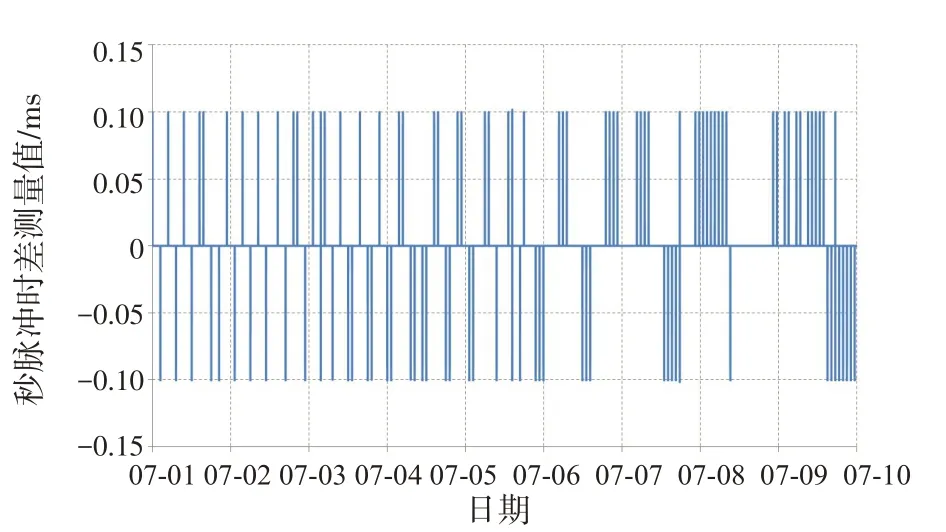
图3 CTU在轨GPS秒脉冲时差测量(校正)值Fig.3 CTU in-orbit GPS pulse per second time adjusting scheme
2.2 GPS总线校时
当GPS秒脉冲信号故障时,数管计算机自动降级到GPS 总线校时。数管计算机每秒通过1553B 总线向各终端用户广播已修正软件时延和通信时延的当前系统时钟。GPS接收机收到数管广播时钟后,在接收机内部进行GPS-CTU 时差的计算,把计算差值通过总线消息返回给数管计算机。数管计算机收到该消息后,在判断正确与否及地面授权的情况下,将该时差修正到当前系统时间中。GPS 总线校时的优先级仅次于GPS秒脉冲校时,GPS总线时差在轨实测精度接近时间量化精度,在-0.1~0.2 ms,如图4所示。
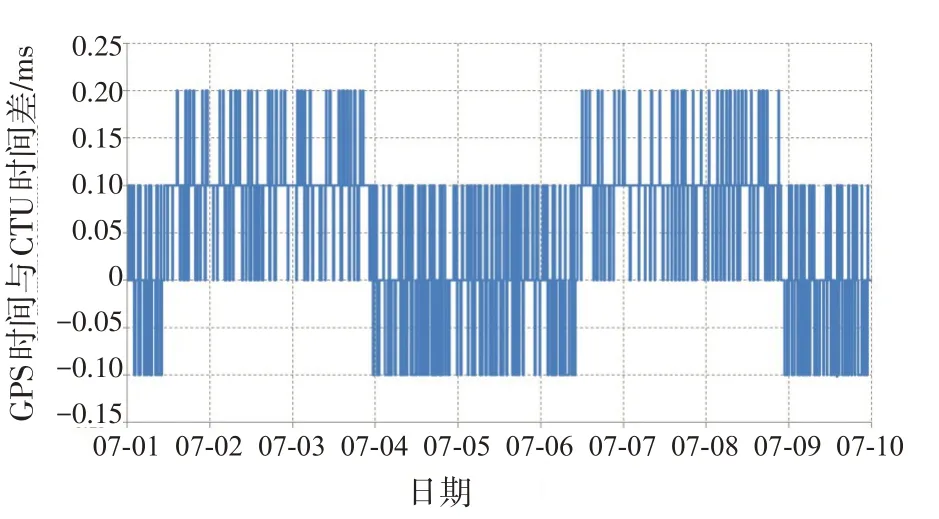
图4 CTU在轨GPS总线时差测量精度Fig.4 CTU in-orbit GPS bus timing gap measuring accuracy
2.3 高稳晶振均匀校时
在默认的情况下,数管计算机采用精度达10-8、稳定度达10-9的高稳恒温晶振产生的100 μs的时钟计数作为星上时间的基准。地面根据星上下传的遥测帧中的数管时钟与地面时钟进行比对,扣除设备固定时延和轨道空间时延,可计算星地时差。
地面根据一段时间的星地时差变化情况,评估生成集中校时注数对星上时钟进行整体修正.对时差的线性变化部分,生成均匀校时注数,即周期性地进行时钟拨快或拨慢1 个时间单位,从而实现对星上时钟的漂移情况修正。
根据时钟的精度和稳定度,使用该方法,每天1次星地时差测量与校正,可以保证卫星星地时差优于5 ms 的要求。利用高稳晶振进行星地时差测量后,进行集中及均匀校时的校时流程如图5所示。
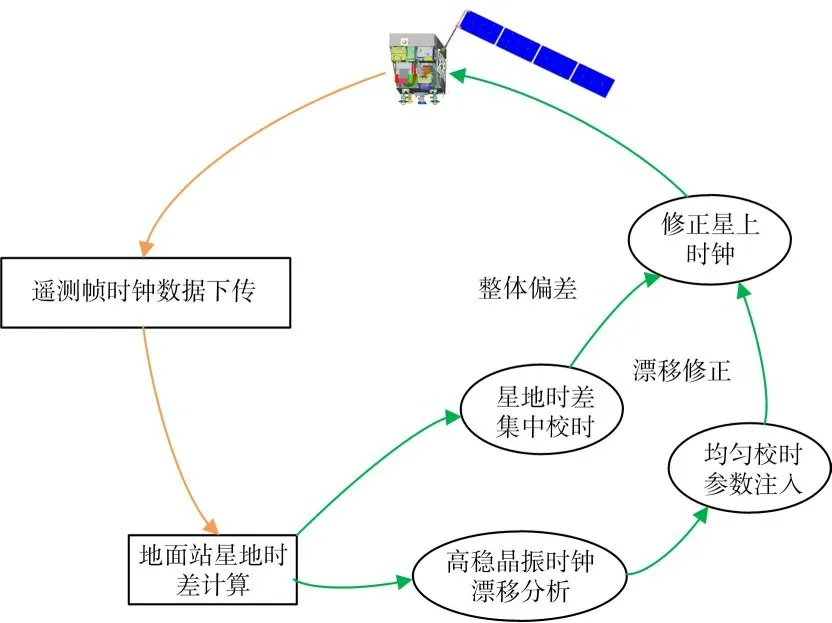
图5 高稳晶振均匀校时流程Fig.5 Time Synchronization scheme of high stability crystal homogeneous adjustment
2.4 CPU计时器均匀校时
星上设计了计时器切换的硬件结构,可通过地面遥控注数选择采用高稳晶振计时器或CPU 晶振计时器。CPU 自带的晶振计时器精度不如高稳晶振计时器,默认选择高稳晶振计时器。通过更频繁地星地时差测量分析及集中校时,在高稳晶振失效后,也可以保证卫星的星地时差优于5 ms。星上高稳晶振和CPU晶振的硬件切换结构,如图6所示。
2.5 软钟校对
星上设计是在硬件计数器均不可用的情况下,采用的1种软件节拍累加计时手段,即每个0.5 s软件周期,直接给系统时间加上0.5 s,再结合均匀校时手段,实现具有一定精度的最小配置、最简时间生成手段。
3 适应不同精度需求的终端时间同步方案
GF-5 的终端时间同步方案基于1553B 广播及GPS秒脉冲,不采用时间基准单元。一般精度需求下直接采用1553B 总线时间广播结合内部计数器获得本地时间,终端内部的其他单机再设计内部秒脉冲等方式进行时间同步;高精度需求下,设计通过1553B广播结合GPS 秒脉冲进行时间获取。下面分别给出星上4种典型的时间获取方式。
3.1 基于1553B中断的时间同步方案
姿轨控计算机、低分辨率观测载荷等终端用户设计采用基于1553B 中断的时间同步方案。终端在本地维护1个本地时间,收到1553B广播中断后,对本地时间的偏差进行计算,以便进行时间误差修正。终端本地具有1个时钟计数器,当终端下位机软件每收到1次数管广播(中断)时,可先通过判断前后2 次数管广播时钟的差值等状态,判断数管时钟是否在正常范围。如果正常,在1553B 时钟广播触发的中断内,计算终端系统时钟与1553B 广播时钟的钟差ΔT,作为校时量使用。在终端下位机软件的时间周期任务开始时,将终端系统钟加上钟差ΔT获得校正后的时间。基于1553B中断的时间同步方案如图7所示。
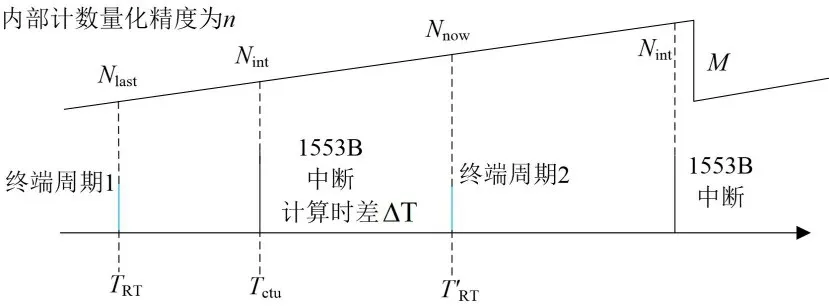
图7 基于1553B中断的终端时钟方案Fig.7 Time synchronization scheme based on 1553B interruption
图7 中:TRT为终端上一拍的时间;为终端收到的数管时间,在广播时已经对运算及总线传输时延进行了修正;Nlast为终端上一拍的内部计数值;Nint为收到数管时刻的内部计数值。
需要考虑到内部计数器的溢出影响,广播接收时刻的时差ΔT由式(4)计算:
式(4)中:n为内部计数器时间量化精度;M为内部计数器发生进位的数值。
在每个终端时间周期的开始,进行新终端时间的维护,由式(5)计算:
该方案允许终端进行整体校时,以修正与1553B广播的时间延迟。可以对数管时间进行合法性、均匀性判断,增加可靠性措施。
3.2 基于1553B及内部秒脉冲的时间同步方案
卫星星敏感器采用基于1553B 及内部秒脉冲的时间同步方案。姿轨控计算机通过1553B进行校时,与星敏感器通过RS422 进行连接,采用内部秒脉冲(Pulse Per Second,PPS)信号进行时间同步,采用RTS(Request to Send,RTS)信号提出数据获取请求。当姿轨控计算机发送PPS信号时,星敏感器锁存对应时刻的本地钟TPPS,单位ms。当姿轨控计算机置低RTS信号时,星敏感器将锁存该时刻的本地钟TRTS,单位ms,并发送最新解算姿态数据包,在数据包中给出曝光时刻TExp至最近1 次PPS 之间的曝光时差ΔTEP。由于RTS 为0.25 s 一次,PPS 为1 s 一次,两者的周期不一致,有可能存在RTS 信号与曝光时刻TExp之间有PPS信号更新的情况。在计算曝光时刻TExp时间时,需要根据TRTS与TPPS的时差()ΔTRP=TRTS-TPPS进行判断。基于内部秒脉冲的星敏感器各类时间示意图,如图8所示。
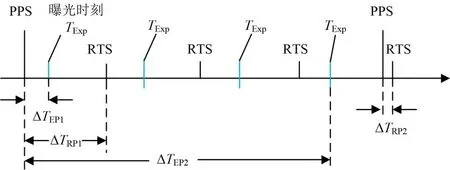
图8 基于内部秒脉冲的星敏感器各类时间示意图Fig.8 Time schematic of star sensor based on internal PPS
根据逻辑关系有星敏感器曝光时刻TExp由式(6)计算:
3.3 可见短波红外高光谱相机高可靠时间同步方案
可见短波红外高光谱相机空间分辨率为30 m。为了满足图像定位精度和配准精度的需求,设计采用GPS 秒脉冲进行校时,当接收到秒脉冲时,载荷微秒计数器清零。
为了适应发生秒脉冲异常、广播异常等可能性,设计有由电控箱维护的内部100 μs 计数和头部电路维护的内部μs计数,分别由时间广播和GPS秒脉冲触发清零操作。另设计“本地缓存时钟1”和“本地缓存时钟2”对时间进行缓存,进一步提高可靠性。
可见短波红外高光谱相机的时间码的传递流程如图9所示。
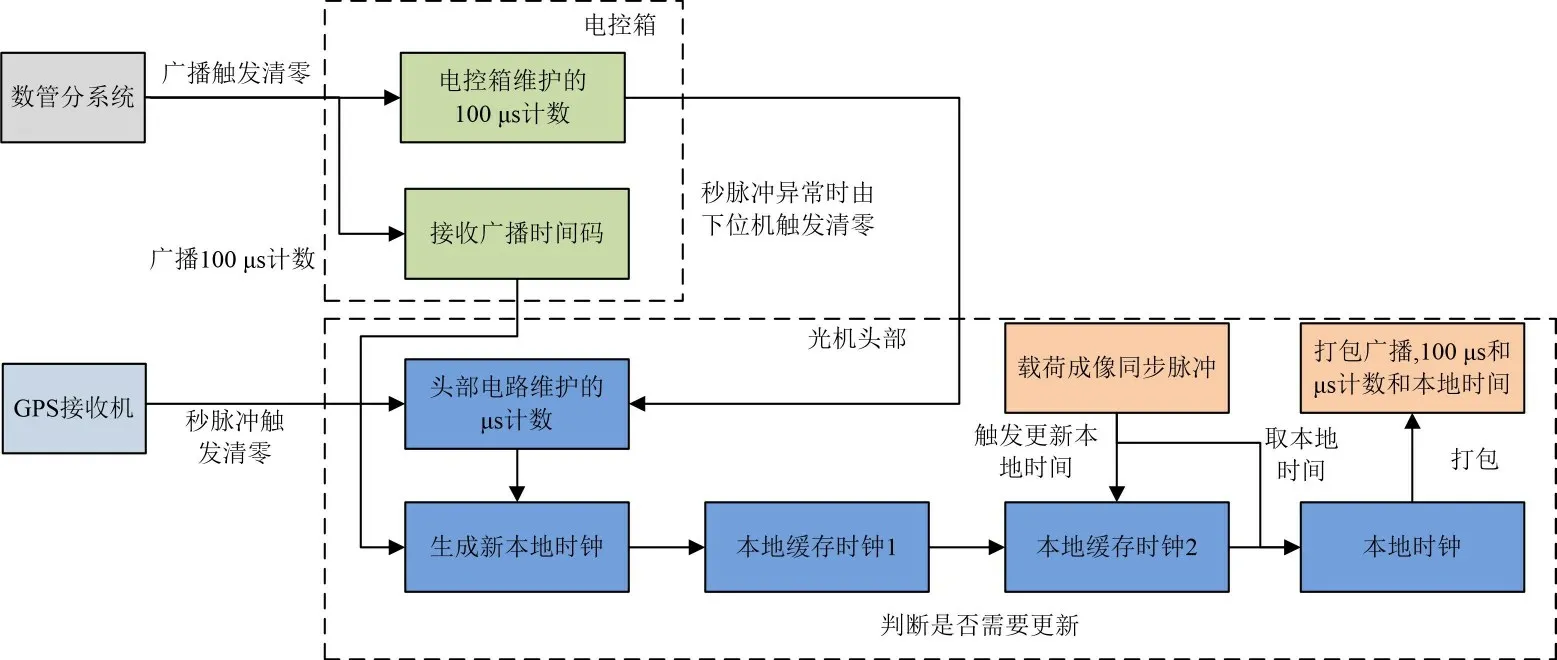
图9 可见短波红外高光谱相机时间传递流程Fig.9 AHSⅠtiming flow diagram
其中,“本地缓存时钟1”“本地缓存时钟2”和“本地时钟”的定义如下。
1)本地缓存时钟1:在可见短波相机内部维护的1 个载荷实时钟,用于缓存最新获取的星上时间。在与“本地缓存时钟2”比较后,判断是否需要更新本地时钟,若需要,则可将“本地缓存时钟1”赋值给“本地缓存时钟2”。
2)本地缓存时钟2:在可见短波相机内部维护的1个载荷实时钟,用于缓存即将需要更新的本地时钟,“本地缓存时钟2”在成像脉冲触发后延迟赋值到本地时钟。
3)本地时钟:可见短波相机内部维护的1个载荷实时钟,在成像脉冲触发时将每帧的成像时刻打入辅助数据包。
为了适应数管广播及秒脉冲可能存在故障后的应用,对数管广播及秒脉冲的计数值进行逻辑判断,根据正常范围进行处理。星上GPS 秒脉冲设计的精度为1 μs。当GPS 秒脉冲正常时,微秒计数器计数值范围在1 000 000±1 以内,超出则认为GPS 秒脉冲失效;若星上100 μs计数广播正确,则本地缓存时钟1和2 中的时间之差在[-5 ms,5 ms] 内,若监测到超出范围,则可认为星上100 μs计数广播失效。
3.4 全谱段光谱成像仪简化的时间同步方案
全谱段光谱成像仪最高空间分辨率为20 m。为了满足图像定位和通道配准的需求,引入了GPS秒脉冲进行高精度校时。全谱段光谱成像仪管理控制盒通过1553B总线接收数管广播时间码,通过RS-422接口接收GPS 接收机发送的秒脉冲。管理控制盒在收到时间码和秒脉冲后不做处理,直接向信号处理盒转发时间码和秒脉冲信号。信号处理盒完成图像辅助数据的编码,包括广播时间码、行同步对应内部计时锁存值、秒脉冲对应内部计时锁存值的记录和打包。全谱段光谱成像仪数管广播时间码和GPS 秒脉冲的传递流程如图10所示。
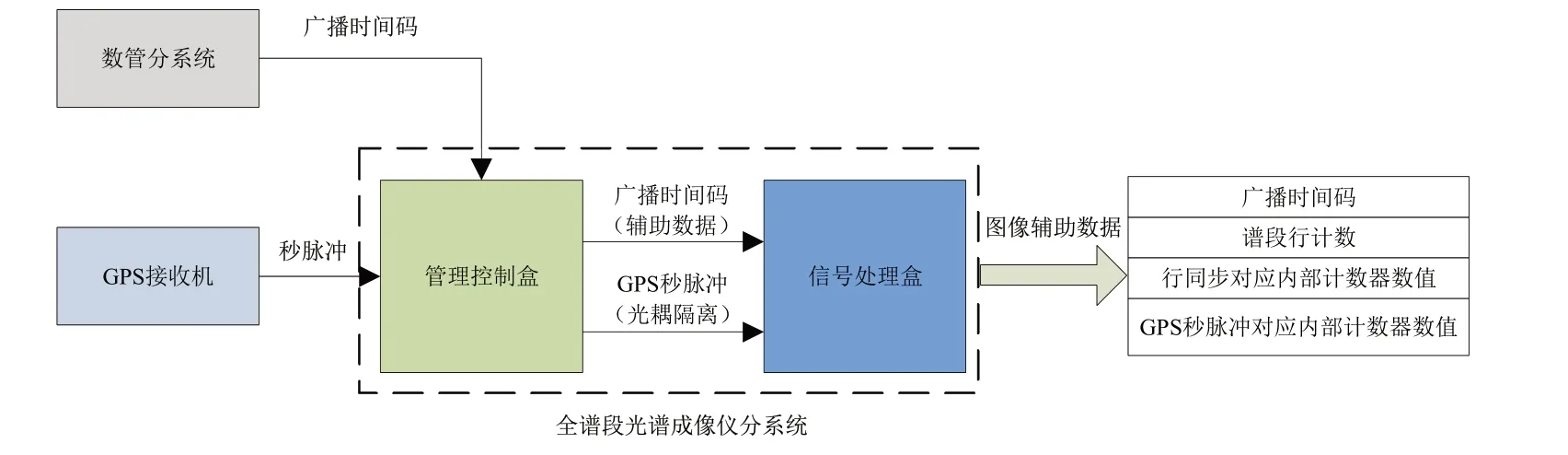
图10 全谱段光谱成像仪时间传递流程Fig.10 VⅠMⅠtiming flow diagram
基于该硬件方案,原设计入轨后,采用直接时间码重建方法,即使用广播时间的整秒,加上成像时内部计数器与秒脉冲时刻的差值对应的秒内时差,
式(7)中:Tn+1为上一个整秒计数;NH为行同步计数器数值;Nn+1为上一个秒脉冲对应计数器数值;M为计数器的计数数量。
实际上,由于广播更新时刻与秒脉冲下降沿更新时刻完全不相关,二者的秒长存在差异,如果直接采用广播时钟的整秒,不管是直接取整数部分还是通过四舍五入取整数,均有可能产生整秒值的1 s模糊。为了解决该问题,利用数管广播时间更新时的成像行对应的内部计数,以及秒脉冲更新时刻的内部计数之间的关系,严格重新计算数管广播时刻的精确时间,四舍五入计算秒脉冲更新时刻的准确整秒时间。全谱段光谱成像仪秒脉冲校时实现方案中各计数之间的时序关系,如图11所示。
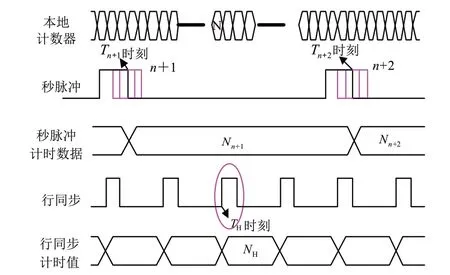
图11 全谱段光谱成像仪秒脉冲校时实现方案原理图Fig.11 Schematic diagram of realization scheme of VⅠMⅠpulse per second time correction
4 时间精度分析
下面分别给出各时间重建算法的地面重建的精度分析结果。
4.1 数管高稳晶振在GPS失效后的时间精度分析
已知高稳晶振的时钟频率f为5 MHz。经测试,数管计算机A 机的高稳晶振的稳定度Δf为1.2×10-9,用t表示待求的漂移时间(守时误差)。t时间内,总晶振脉冲个数为ft,当存在频率偏差时,根据脉冲个数一致,有时钟的漂移方程如下:
两边约去f,则上式可展开为:
忽略二阶小量Δf×Δt,漂移时间(守时误差)可简化为:
当门限 Δt取0.1 ms 时,可计算出t为8.33×104s,约等于0.965 d,即当GPS 秒脉冲失效时,时钟误差在1 d左右才漂移出1个时间码字0.1 ms。
4.2 星敏感器时间精度分析
卫星姿态测量误差包括失重后的重力释放误差、在轨热变化误差、测量低频误差、测量噪声等,在入轨后难以直接评价,地面多通过高分辨率载荷的地标匹配等对姿态绝对测量误差进行评价,通过星敏的夹角法等对姿态的测量噪声进行评价。图12 给出进行时间码重建后,在轨星敏感器连续3轨的夹角噪声情况。
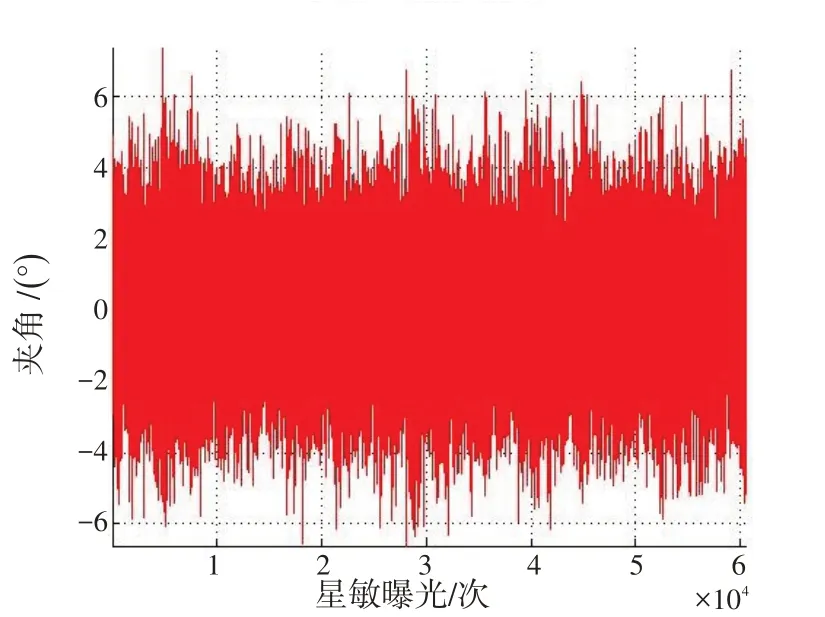
图12 2台星敏感器的夹角噪声情况Fig.12 Noise of the included angle of two star sensors
对该星敏的测量噪声求3 倍标准差有3σ噪声为5.2″,而1 ms的时间误差就达到3.6″,由此推断出星敏感器的时间重建没有出现跳变等错误。卫星地面系统的在图像定位过程中,对星敏事后处理精度分析结果如表2所示。
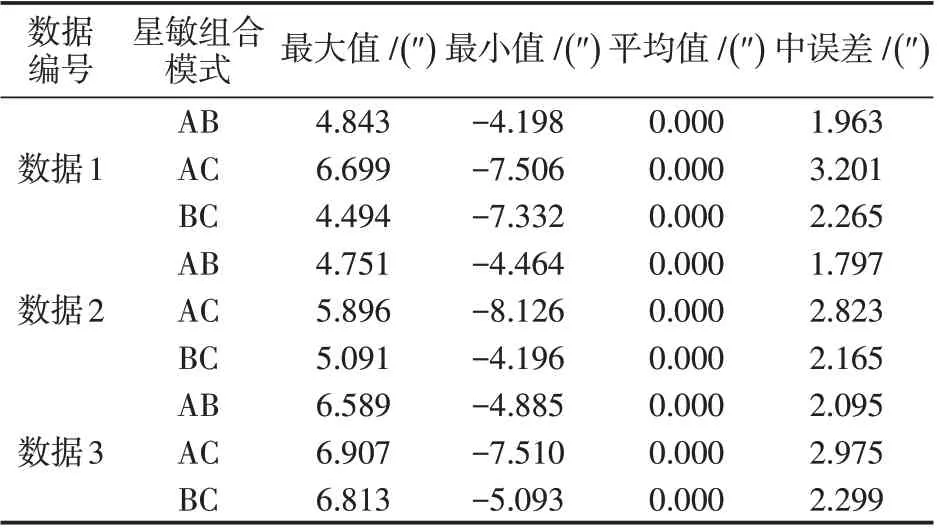
表2 在轨星敏感器随机误差情况统计Tab.2 Random error statistics of star sensors in orbit
从表2 的结果可知,卫星星敏感器的夹角中误差优于3.2",星敏时间重建方法可满足使用的要求。经过热变形标定,图像定位精度从约200 m 提升至优于45 m。
4.3 可见短波红外高光谱相机时间精度分析
利用文中给出的可见短波红外高光谱相机高可靠时间同步方法,任意取1 天(2018 年11 月9 日)的光照期遥感数据进行处理,得到成像帧间时差曲线如图13所示。
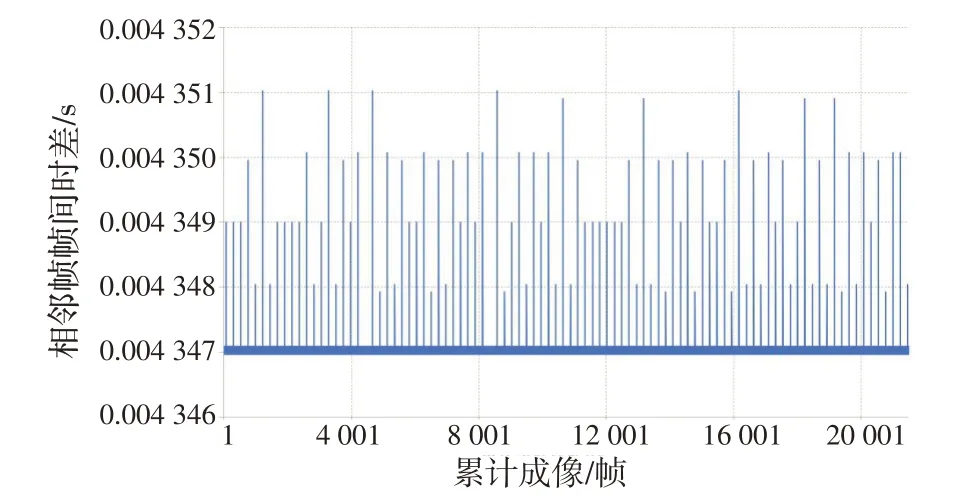
图13 可见短波红外高光谱相机成像帧间时差Fig.13 AHSⅠtiming gaps of adjacent frame
从图13可看出,可见短波红外高光谱相机的相邻成像帧间时差的波动值小于6 μs,没有出现整秒的不确定情况,时间码的重建精度可满足图像定位及配准要求。
4.4 全谱段光谱成像仪时间精度分析
利用全谱段光谱成像仪时间同步方法,对卫星第3 505 圈(2019 年1 月4 日)的全谱段光谱成像仪遥感数据进行分析,从广播时间递推至下一秒脉冲时间的修正量及秒脉冲时刻数管时间的小数部分,如图14所示。
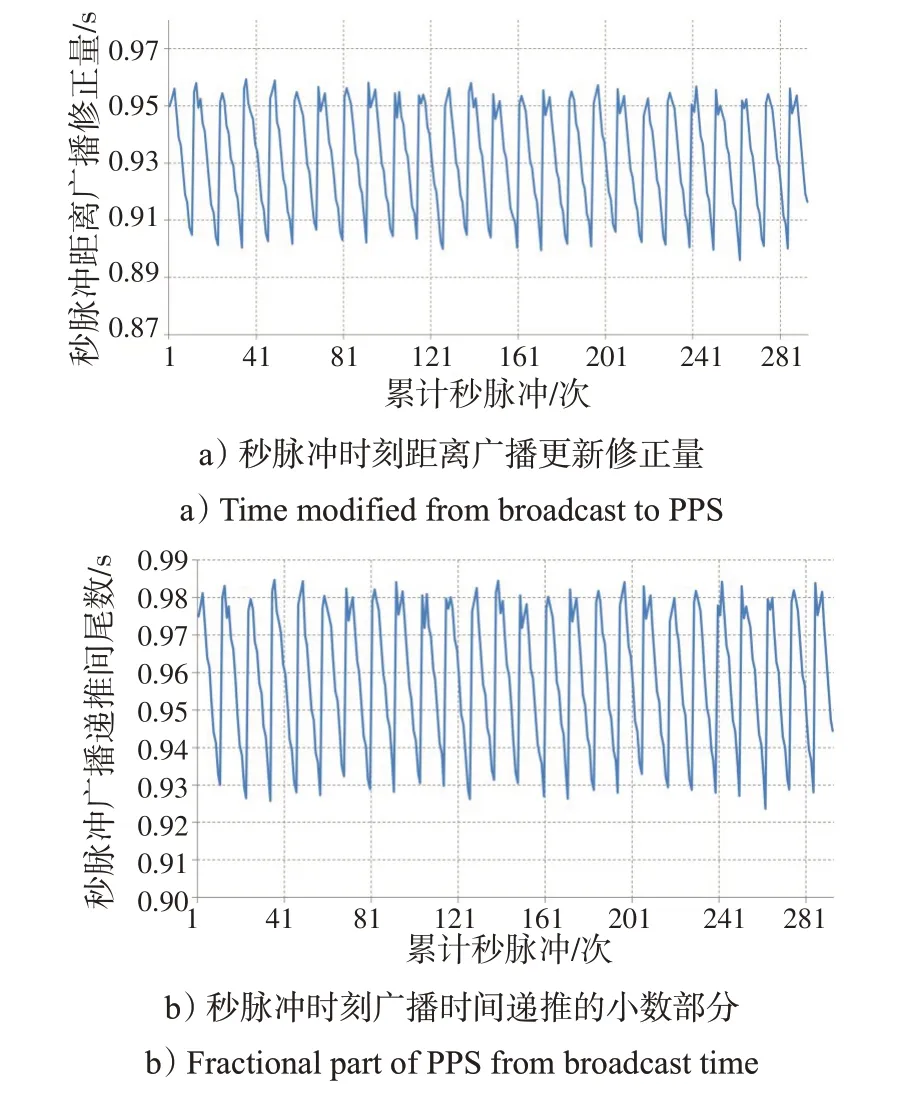
图14 从广播时间递推的秒脉冲时刻的修正值及秒内余数Fig.14 Broadcast-derived PPS modified time and fractional part
全谱段光谱成像仪时间码重建后,相邻成像帧间的时差如图15所示。可见,不会出现原直接时间码重建方法出现的整秒跳动情况。从图15可看出,全谱段光谱成像仪的相邻成像帧间时差的波动值小于3 μs,时间码的重建精度可满足图像定位及配准要求。
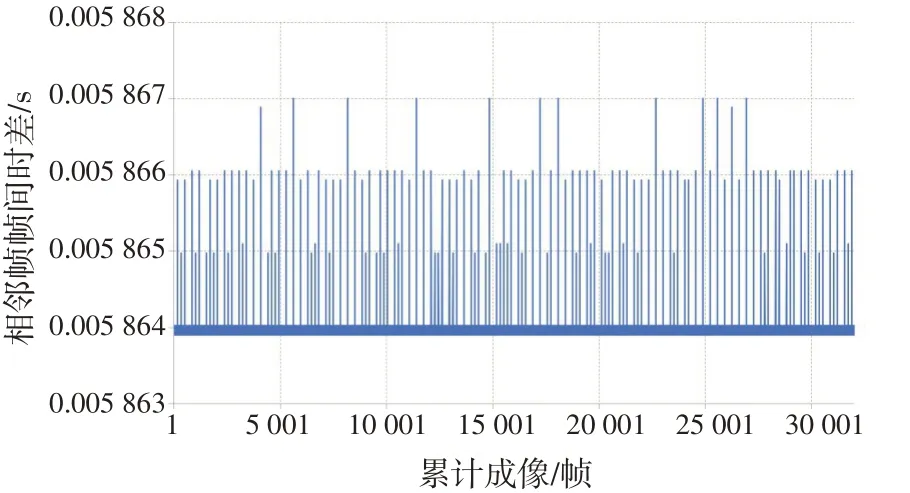
图15 全谱段光谱成像仪相邻成像帧间时差Fig.15 VⅠMⅠtiming gaps of adjacent frame
图16 给出采用本文提出时间码重建方法的2019年2月25日第4 263圈及2019年5月1日第5 209圈前后帧帧间时差分析结果。可以看出:采用本文的时间码重建方法,时间码不存在跳变;而采用最早提出的基于广播时间整秒+秒脉冲秒内计数的直接时间码重建方法,存在时间码跳变。
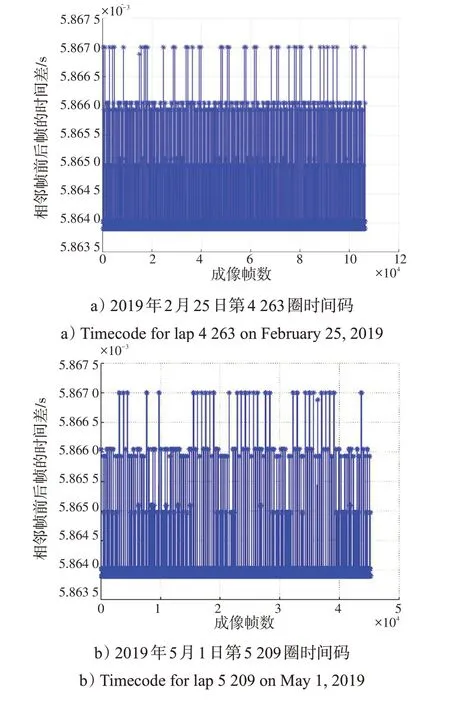
图16 全谱段光谱成像仪不同时间的相邻成像帧间时差Fig.16 VⅠMⅠtiming gaps of adjacent frame in different imaging times
图17 给出采用直接时间码重建方法的2019 年2月25 日第4 263 圈及2019 年5 月1 日第5 209 圈前后帧帧间时差分析结果。
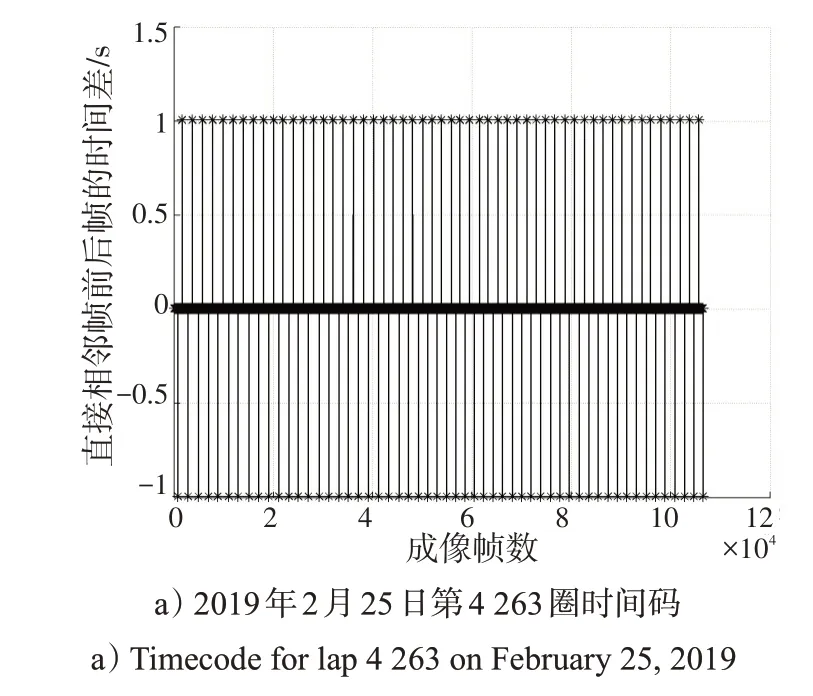
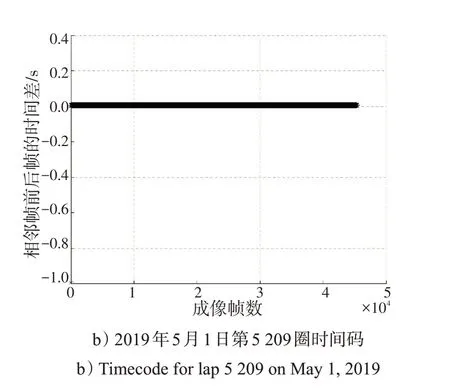
图17 全谱段光谱成像仪不同时间的相邻成像帧间时差(直接法)Fig.17 VⅠMⅠtiming gaps of adjacent frame in different imaging times by direct timing method
可以看出,采用原来的直接秒脉冲加秒内计数法,在第4 263 圈的成像中,时间码存在来回跳变,在第5 209圈的成像中,第1帧时间偏差1 s,后续时间整体偏差1 s。
5 结论
本文设计了适用于GF-5 的高精度时间同步系统方案,对于系统时间,综合采用集中校时、GPS总线校时、GPS 秒脉冲校时、校匀校时等多种校时方案。对于终端用户,给出适应一般精度需求的基于1553B中断的时间同步方案、基于1553B及内部秒脉冲的时间同步方案、适应高精度应用需求的可见短波红外高光谱相机高可靠时间同步方案、全谱段光谱成像仪简化的时间同步方案以及推荐的标准秒脉冲应用时间同步方案,可用作遥感卫星时统方案设计的参考。经过评估,在GPS 秒脉冲失效后,数管计算机的高稳晶振可以使系统时钟误差在1 d 左右漂移出0.1 ms。利用在轨遥感下传数据对星敏感器、可见短波红外高光谱相机及全谱段光谱成像仪曝光时刻的时间重建精度进行了评估。分析表明:星敏感器、可见短波红外高光谱相机、全谱段光谱成像仪这3 台仪器的时统方案可满足高精度图像定位及配准的要求。
猜你喜欢
数学小灵通·3-4年级(2021年9期)2021-10-12
空间科学学报(2020年1期)2021-01-14
小学生学习指导(低年级)(2020年10期)2020-11-09
电子制作(2018年10期)2018-08-04
数学大王·中高年级(2017年2期)2017-02-08
学苑创造·A版(2016年4期)2016-04-16
西部广播电视(2015年9期)2016-01-18
中国光学(2015年1期)2015-06-06
河北遥感(2014年4期)2014-07-10
电测与仪表(2014年16期)2014-04-22
