时空关联多跟踪剔除的多源数据融合方法
2023-07-13 11:28:20郭玉霞崔炳喆
海军航空大学学报 2023年3期
潘 亮,郭玉霞,崔炳喆
(1.中国空空导弹研究院,河南 洛阳 471009;2.空基信息感知与融合全国重点实验室,河南 洛阳 471009)
0 引言
随着网络信息共享技术的发展和对空天地海网一体化作战形态[1-2]的深入研究,未来空战态势将日益透明,参战单元的数量、性质、航迹、红外特性、目标类型以及雷达特性等信息源将被全方位的探测设备感知,这对以“面向数据(Data-centric)”的分布式协同和数据融合[3-4],提出了更多严格要求。数据要具有时效性、精度性和可信性,即3R(Right-data,Right-time&Right-place)标准[5]。
同时,隐身作战单元的投入服役对单一制导体制的探测系统,如雷达制导系统、红外制导系统等的反隐身能力提出了极大的挑战。多探测系统构建的多源异构数据能够实现多特征集表征,融合处理能提高目标的检测概率,降低对干扰、杂波的虚假截获,从而提高精确制导武器的作战效能和生存命中概率。因此,在有限的设备载荷资源下,多源数据融合是提高精确制导武器反隐身、抗干扰能力的有效方法。
1 多源异构数据融合
多源异构数据融合[6-8]能够综合利用各个探测平台的性能优势,从不同角度、方向和特征对敏感的探测目标进行全方位感知,探测信息通过网络化信息共享技术实现平台共享,同时接收来自其他探测平台共享的敌情态势信息,最后在各自的信息处理服务中心进行数据融合。融合算法整合互补信息、去除冗余信息,这不仅有利于各探测平台发挥其性能优势,还增强了各平台的探测性能,实现对目标的精确描述[9-10]。
在精确制导武器系统中,国内外常用的数据融合源有主被动复合和雷达红外复合等,它们在提供系统抗干扰性能和反隐身以及可靠性等方面发挥了重要作用。主被动雷达探测系统充分利用了主动探测和被动探测的各自优势,既能远程探测目标的角度和位置信息,使精确制导武器静默工作,又能近程精确探测目标,获取目标的角度、位置和速度信息以提高末制导能力。
红外探测具有高测角精度和强目标识别能力。雷达作为主动探测,能够实现全天候、全天时。因而,雷达红外复合系统具有很好的信息互补优势,能够提供更完整的探测信息。
在一体化作战形态下,精确制导武器的信息源不仅来自本体的雷达、红外或者被动探测等,还将接收本体外的天基、地基,我机和友机等平台信息。针对这种新形态的数据融合技术,研究表明,多源异构数据融合涉及数据滤波、空时配准、航迹处理、目标优选等方面。
实际场景中,作战区域往往不是全域覆盖,敏感目标和隐身目标数量也不是无限增量。针对敏感区域内有限目标的探测跟踪问题[6,8],为了研究多源数据融合问题,本文提出1 种时空关联多跟踪剔除的多源数据融合方法,该方法主要涉及数据滤波、航迹关联以及时空关联多跟踪剔除设计等过程,其功能组成如图1所示。
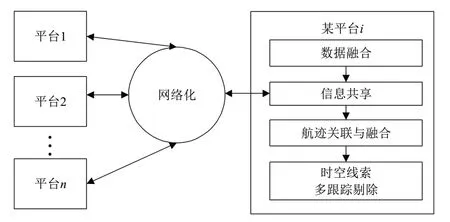
图1 时空关联的多源异构数据融合功能组成Fig.1 Function composition of multi-source data fusion of space-time correlation
2 关键设计
2.1 数据滤波
探测系统数据采集的随机误差以及不同探测器数据更新周期存在的差异等,要求对多源数据进行平滑处理,即滤波。滤波方法的选取主要依赖于系统模型。对于时敏性不强的数据源,基本滤波算法即可实现高精度无静差的滤波;而对于强时敏性、非线性和强耦合性的数据,基本滤波算法不能满足使用需求。因此,针对匀速、匀加速等线性高斯运动系统,人们提出了α-β-γ滤波算法,并以此为基础,提出了具有自适应权值调整能力的卡尔曼滤波算法[11-12];对于非线性高斯系统,提出了扩展卡尔曼和无迹卡尔曼等滤波算法。
卡尔曼滤波算法是1种经过数理推理证明的线性递推滤波方法,在工程设计的运动轨迹滤波预测中取得了很好的实践验证。但其探测跟踪目标的机动能力有限,且只有在逃逸时才做大范围机动动作,因此,在硬件资源有限时,卡尔曼滤波算法是精确制导武器探测系统的优选算法。卡尔曼滤波算法利用当前时刻的观测值、状态和前一时刻的最优滤波预测值,通过探测系统的状态转移递推预测状态估计。其滤波更新主要涉及状态更新和量测更新等2个过程(如图2所示)。
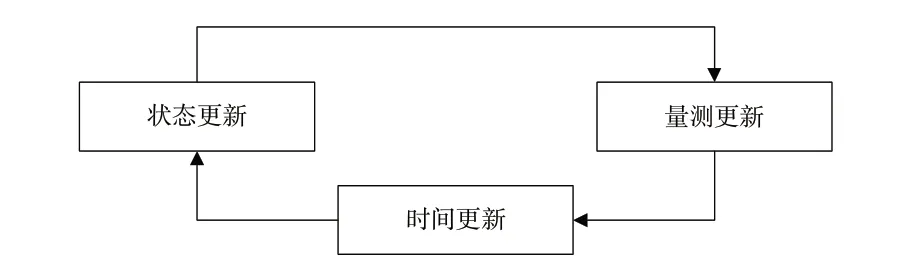
图2 卡尔曼滤波算法数据更新流程Fig.2 Data update process of the Kalman Filter Algorithm
卡尔曼滤波算法的量测和状态更新满足状态预测估计方程、协方差预测方程、滤波增益更新方程、状态修正更新方程以及协方差更新方程这5 个关系式,它们共同构成了滤波算法基本流程(如图3所示)。

图3 卡尔曼滤波算法流程Fig.3 Flow of the Kalman Filter Algorithm
2.2 航迹关联
航迹关联中,无论是实用的逻辑法,还是基于先验信息的概率关联法,关联过程都存在2个不确定性,即航迹起源和目标状态。随着多目标探测的需求,杂波、电子对抗和假目标的存在,历史航迹和新增航迹的交互影响,航迹关联的不确定性进一步加重。解决航迹不确定性的关键是空时配准,即空间配准和时间配准。
空间配准[6]是指在一体化系统架构内,通过插值、平滑、滤波等数据处理方法,利用基准系统的归化坐标,如地表惯性坐标(如图4 所示),建立点迹,实现空间关联的一致性。时间配准主要针对长航时和信息高速共享的数据融合需求,各个探测平台利用接收的天基或地基平台中高精度授时时标系统进行点迹间的时序性关联配置[13],对经协调同步对齐配准后的数据进行融合。在空时配准的基础上,航迹关联通过M/N逻辑法建立由点迹到航迹关联处理,并实现野点剔除和航迹可信度打分排序。
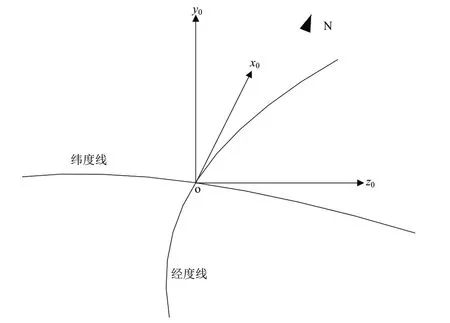
图4 地表惯性坐标系Fig.4 Ⅰnertial coordinate system of surface earth
图4 中,归化坐标系的坐标原点为一体化作战系统指定的原点,可以在地面或空中;ox0轴为沿着当地地球经度线指向北极;oz0轴为沿着当地地球纬度线指向东;oy0为天向,满足右手系。
2.3 融合数据“簇”
特定场景下,针对建立多跟踪融合数据“簇”问题。假设平台能够支持的航迹最多有50条(如图5所示),涵盖了由目标、干扰或杂波等形成的航迹。经多源数据融合后,每条航迹的量测特征要素有归化坐标系下的坐标、速度、加速度、幅度、强度、方位、灰度、多普勒、几何外形和RCS 等信息,一体化多源异构平台通过链表法遍历查询航迹,每条航迹能够索引出该目标具有的特征要素。数据“簇”建立时,为实现多跟踪剔除逻辑的往前回溯功能,采用先进先出(First Ⅰnput First Output,FⅠFO)的数据处理方式,保存经过融合后的航迹信息。经融合后,每条航迹链表查询的特征要素如表1所示。

表1 融合目标具备的特征要素集Tab.1 List of the feature set of the fusion target

图5 数据“簇”的更新过程Fig.5 Update process of fusion data"cluster"
数据“簇”处理中,假设aij为第i次采样得到的第j个特征元素,从而建立当前时刻的融合特征元素矩阵Ak=[aij]。
2.4 时空关联多跟踪剔除
距离拖引干扰[14-15]的特征要素是距离波门,当干扰机释放干扰时,若无相应干扰对抗措施,跟踪的距离波门将被拉偏,一段时间后,干扰机停止拖引,探测系统的距离跟踪回路因为检测距离波门超限而被打破;速度拖引干扰的特征要素是速度波门,当干扰机释放拖引时,跟踪的速度波门将被拖偏,一段时间后,干扰机停止拖引,探测系统的速度跟踪回路因为检测速度波门超限而被打破;噪声干扰的特征要素是噪底,干扰机释放时将使噪底明显抬高,以致淹没目标信号,破坏探测系统的正常目标检测,从而达到干扰效果。根据特征要素(距离、方位、速度、加速度、幅度或强度等)出现时空不相关的偏离现象,与先验信息不相符的,时空关联多跟踪剔除逻辑将之识别为“小概率不可能”事件,从而实现将来自干扰或杂波的航迹剔除。简单脉冲下,速度波门拖曳干扰与真实目标在多普勒维的差异性,如图6所示。

图6 PD雷达的速度波门拖曳干扰与目标的频谱差异Fig.6 Spectrum difference between the speed gate drag interference and the real target in PD radar
针对具有多目标跟踪能力的精确制导武器,经剔除处理后,在复杂电磁多目标环境中,探测系统可能依然能够检测并截获多个目标,制导武器系统需要对其中1个优选目标进行检测跟踪闭环。
优选目标的确定:一方面根据制导武器系统的指示信息;另一方面基于检测信息的相邻帧进行设计。在无先验信息情况下,记录并保存每个待选目标的检测数据“簇”,根据多假设跟踪的处理逻辑[15],设计具有时空关联多跟踪剔除方法,即假设每个扫描周期探测信号来自目标、杂波或干扰等,但只能由1 个源产生,同时探测空间中目标、杂波和干扰只能产生1 个探测信息,依此建立具有面向探测的关联数据“簇”,当数据关联发生冲突时,形成剔除逻辑判决策略,即杂波具有一定统计特征,干扰与真实目标在幅度、多普勒、距离、角度等方面具有一定差异性,根据目标航迹的时序连贯性和杂波或干扰的空时突变性[16-17],对多跟踪目标进行专家打分和评价,迭代剔除“小概率不可能”的跟踪事件,即得分低航迹,优选得分最高的检测,以完成对多目标的跟踪剔除,最终实现精确打击效能。
根据装订目标的先验信息,建立上述数据“簇”中各特征元素的一阶差分式(1)和二阶差分式(2)的专家经验可行观察范围B1=[]和B2=[],定义如下式(3)和(4)的一、二阶差分生成的符号函数:
从而有某一维特征元素形成的综合符号函数:
式(5)中,α和β为经验的权重系数,且α+β=1。
本文提出的时空关联多跟踪剔除的多源数据融合方法结构框图,如图7 所示,主要包括数据聚簇、航迹关联、多跟踪专家评估与剔除等处理过程。

图7 时空关联多跟踪剔除算法流程Fig.7 Flow of space-time correlation and multi-tracking elimination algorithm
基于以上推算专家评估[18-19]1 条航迹质量的得分情况,按照如下原则累计:
1)航迹建立后,初始赋分为10;
2)统计航迹中每1个特征元素的综合符号函数,若连续N个时刻出现“1”,则历史得分减1;
3)若连续N个时刻都为“0”,则历史得分加1。
若航迹得分出现0,则将其从数据“簇”序列中剔除。在导引制导环路,选择航迹得分最高的目标进行检测跟踪并攻击。
3 仿真验证
时空关联多跟踪剔除逻辑是基于干扰、杂波与真实目标的特征元素在时间维上差异性,将数据“簇”的数据要素进行融合关联,剔除“小概率不可能”事件,进而保留“可能”事件,依据专家经验评估打分闭环跟踪优选目标,从而实现时空连贯性跟踪剔除。为验证设计逻辑的正确性,假设场景中只有1个目标,目标从起始点(500,3 000)m 处起飞,沿x方向匀速运动,在x=1.4 km 位置,出现2种不同速度的距离波门牵引干扰(RGPⅠ)迎头面向雷达运动,被跟踪剔除后,在x=2.3 km 位置,距离波门拖引干扰(RGPO)远离雷达运动,实施距离波门拖偏干扰。本文所提方法的干扰对抗效果,如图8所示。
可以看出,本文设计的时空关联多跟踪剔除方法能够跟踪目标和干扰,并最终实现将干扰航迹剔除。
4 结论
针对场景内有限敏感目标或隐身目标的探测跟踪问题,通过研究一体化作战系统中多源异构数据融合——数据滤波、航迹关联、数据簇和多目标跟踪等,提出了1 种时空关联多跟踪剔除的多源数据融合方法,重点介绍了时空关联多跟踪剔除的设计逻辑是目标、干扰和杂波的空时特征差异性,并根据专家评估打分建立优选目标航迹和剔除“小概率不可能”航迹。典型的干扰对抗仿真试验表明,本文设计的时空关联多跟踪剔除对多源数据融合问题具有一定参考价值。
猜你喜欢
四川党的建设(2022年8期)2022-04-28 21:29:35
科学与信息化(2021年30期)2021-12-24 08:00:20
小学生学习指导(低年级)(2020年11期)2020-12-14 07:28:10
青年歌声(2019年12期)2019-12-17 06:32:32
作文大王·低年级(2018年10期)2018-12-06 06:22:44
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
小猕猴智力画刊(2016年5期)2016-05-14 09:21:39
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22