果园遥控开沟施肥机设计与试验
2023-07-12 03:16陈中武李君略
现代农业装备 2023年3期
张 轩,陈中武,李君略,何 林
(1.广东省现代农业装备研究所,广东 广州 510630;2.农业农村部华南现代农业智能装备重点实验室,广东 广州 510630)
0 引言
2021 年,我国的水果产量已达到了3.0 亿t[1]。水果产业已经成为我国继粮食、蔬菜之后的第三大农业种植产业,在推进我国农业结构调整、转变农业经济增长方式、提高农民收入等方面发挥着重要作用[2]。
果园生产环节中,开沟施肥的工作量占比很大[3-7]。一方面丘陵山区果园多是小户单干承包作业,果园前期规划差,大型作业机具进不去;另一方面我国小型开沟施肥装备发展起步比较晚,发展不完善,普遍不能很好地适应果园地形[8-10]。目前我国果园开沟施肥作业仍以人工作业为主,人工作业效率很低,人工成本很高,亟需经济适用的果园开沟施肥装备。
我国目前的果园开沟施肥装备主要有电动果园开沟施肥机和燃油果园开沟施肥机。电动果园开沟施肥机采用电力作为动力,可以加载自主导航和遥控功能,机器小巧,操作方便。但是,因为目前电池容量限制,该类机器普遍存在动力不足、开挖深度和宽度不够的问题,不能适应目前主流的果园开沟施肥作业需求。燃油果园开沟施肥机一般采用柴油机作为动力,配套机械变速箱。但是,该类机器一般体积较大且要求近身操作,在果园树枝交错、垂枝较多的环境下通过性能差,并且操作人员容易被树枝划伤,不太适用于果园开沟施肥作业需求。
本文研究的果园遥控开沟施肥机采用36 kW 柴油发动机作为动力源,行走采用履带液压电控驱动。该机既具备充足的动力,提高了机器在丘陵果园的通过性能,还可以实现远程遥控,改善工作人员的作业环境;而且,基于现有的遥控技术还可增加感应雷达、视觉传感器等装置实现避障、路径规划以及作业的决策分析等功能,为开沟施肥机的智能化打下基础。
1 整机结构与工作原理
1.1 整机结构
果园遥控开沟施肥机主要用于果园追肥,可以一次性完成开沟、施肥、覆土作业,整机结构如图1 所示。整机由发动机、行走底盘、液压驱动系统、电控系统、开沟部件、施肥部件和覆土板等部件组成,主要技术参数如表1 所示。其中液压驱动系统主要由变量串泵、齿轮泵、液压马达、电控阀、油缸、液压油箱和液压油散热器等组成。电控系统主要由手持遥控器、车载控制盒、控制电机、角度传感器、电磁离合器、电磁阀、电控油门和电池等组成。

表1 主要技术参数

图1 果园遥控开沟施肥机整体结构
1.2 工作原理
果园遥控开沟施肥机由36 kW、2 400 r/min 的柴油机输出动力,通过分动箱实现行走动力和作业动力的分配。一方面分动箱输出一路动力给变量串泵,通过2 个电机可控制变量串泵的流量输出来分别驱动两个液压马达,从而实现果园遥控开沟施肥机的前进、后退和转向,齿轮泵既是补油泵也是作业部件的动力源,通过电磁阀推动液压油缸伸缩,实现开沟、施肥部件的升降;另一方面分动箱另一路动力通过皮带传动,在电磁离合器的控制下,通过作业变速箱将动力传递给开沟作业刀具,从而实现果园遥控开沟施肥机的开沟作业,同时作业变速箱通过链传动将一部分动力传递给施肥部件,实现果园遥控开沟施肥机的施肥作业。开沟刀甩出的土在覆土板的阻挡下回填到沟里,实现覆土作业。相关传动关系如图2所示。

图2 果园遥控开沟施肥机传动示意图
2 关键部件设计
2.1 开沟部件设计
开沟部件是开沟施肥机的主要执行部件,开沟部件的设计直接影响机器的作业性能。本文研究的开沟部件采用圆盘式结构,圆盘式开沟机在工作过程中具有散土均匀、工作效率高等优点,在果园、葡萄园等农业生产领域得到了广泛的应用[11-13]。圆盘开沟部件主要由作业变速箱、刀盘和开沟刀等组成,如图3 所示。

图3 果园遥控开沟施肥机开沟部件结构示意图
本文研究的果园遥控开沟施肥机的开沟部件采用反转方式开沟作业,即机器前进时开沟施肥机驱动轮的旋转方向与刀盘的旋转方向相反。反转开沟能以较低的刀盘转速获得较高的切土速度,有利于土壤破碎[14]。为保证机器开沟作业的稳定性,在作业变速箱两侧镜像对称安装左右开沟刀盘,并于刀盘两侧交错安装8 把杯型弯刀。每侧4 把开沟刀沿刀盘圆周90°依次排列。
刀盘圆周速度(即刀片端点线速度)、刀盘最大回转直径、刀盘转速、刀片形式及数量等是直接影响开沟部件作业性能的基本参数。
刀盘直径和刀盘转速是圆盘式开沟机的重要设计参数,它对开沟机的抛土、功耗、传动形式及结构尺寸等有着重要影响[15]。
根据丘陵果园条沟施肥的农艺要求,最大开沟深度H为350 mm,开沟深度与开沟刀直径(开沟刀的最大回转直径)的关系为
式中:
D——开沟刀直径,mm;
H——最大开沟深度,mm;
D0——开沟刀盘直径,mm;
δ0——开沟刀具有效长度,mm。
根据式(1),代入最大开沟深度H=350 mm,开沟刀具有效长度δ0=98.5 mm,得到开沟刀盘直径D0取值范围为223~293 mm。结合切土、铣削功耗表现与加工工艺,确定开沟刀盘直径D0为243 mm,开沟刀直径D为440 mm。
按照双圆盘式开沟装置在破土、刨土的过程中,其刀片端点的线速度不低于6.5 m/s 确定刀盘最低设计转速[16]。根据圆周线速度和转速的关系
式中:
umin——切土刀刀片线速度最小值,m/s;
R——开沟刀最大半径,m;
nmin——刀盘最低设计转速,rad/s。
将相关参数umin=6.5 m/s,R=D/2=0.22 m 代入式(3),得到刀盘最低设计转速nmin为283 r/min。
另根据农业机械设计手册中铣抛盘上同一圆周上切土刀的数量Z由每把刀的进给量确定的关系
式中:
vm——机器作业前进速度,m/s;
n——铣抛盘转速,r/min;
Z——铣抛盘上切土刀数量;
c——切土刀的进给量,mm,粘重土取c=3.5~5.0 mm,沙壤土取c=7.5~9.0 mm;一次成沟的取小值。
根据南方丘陵果园土壤偏粘重土的实际情况,取切土刀的进给量c=4 mm,将机器最大设计作业前进速度vmax=1 km/h=0.28 m/s、Z=8 代入(4)式,得到刀盘最大设计转速nmax为520 r/min。结合南方丘陵果园实际情况选取机器最优作业速度vm为800 m/h 和切土刀进给量c=4 mm 等得到刀盘转速n为416 r/min。
2.2 液压系统设计
果园遥控开沟施肥机的液压系统原理如图4 所示,液压油路主要分为2 部分。第1 部分油路主要由齿轮泵、三位四通电磁阀和液压油缸组成。齿轮泵提供液压动力,通过三位四通阀控制液压油缸的伸缩,以此控制开沟施肥部件的升降;第2 部分油路主要由变量串泵和2 个液压马达组成。串泵中的每个泵与一个液压马达构成独立的闭式回路,可独立驱动每个液压马达的正反转,进而分别驱动2 个驱动轮以实现开沟施肥机的前进、后退和转向。齿轮泵同时作为补油泵为2个闭式回路补充冷油。
液压系统中的系统工作压力、液压马达和液压泵的选择等是液压系统的主要设计内容。参考泵和马达的选用手册以及本机的工作环境选定液压系统的工作压力为18 MPa。
驱动轮的扭矩和转速计算需要分作业和转场2种情况。开沟施肥机作业时,驱动轮的扭矩和转速与履带行走提供的最大牵引力和机器行走速度有如下关系
式中:
M——驱动轮驱动扭矩,N · m;
F——机器履带行走能够提供的最大牵引力,N;
R——履带驱动轮的节圆半径,m;
n——驱动轮转速,r/min;
v——机器作业行走速度,m/h。
根据农业机械设计手册中拖拉机的牵引附着性能确定履带行走能够提供的最大牵引力为
式中:
W——机器满载质量,N;
φ——履带行走地面附着系数。
根据农业机械设计手册中履带行走地面附着系数的取值范围,取φ=1.2。(其中荒地地面附着系数取值范围最大,取值范围为1.0~1.2)。
将机器满载质量W=1 200×9.8=11 760 N、履带驱动轮的节圆半径R=0.115 m、机器作业行走速度v=(400~1 000)m/h 代入(7)式,得到机器履带行走能够提供的最大牵引力F为14 112 N,作业行走所需驱动力矩(单边)M为811.44 N · m,作业时驱动轮转速范围n为9.23~23.07 r/min。
机器转场时主要克服滚动摩擦阻力前进,根据农业机械设计手册取φ=0.18(泥沼地0.18,为各种地面的最大值),将转场最高速度v=6 000 m/h 代入(5)、(6)、(7)式,得到机器转场行走所需驱动轮力矩(双边)M为243.43 N · m,转场驱动轮最大转速n为138.40 r/min。
液压马达的排量跟驱动轮扭矩和系统工作压力e有如下关系
式中:
q——液压马达排量,mL/r;
M——驱动轮驱动扭矩,N · m;
p——液压系统工作压力,MPa。
将液压系统工作压力p=18 Mpa、作业时单个驱动轮驱动扭矩M=811.44 N · m、转场时单个驱动轮驱动扭矩M=243.43 N · m(极端单边转向)代入(8)式,可得作业时所需马达排量q为283.25 mL/r,转场时所需马达排量q为84.97 mL/r。选定排量q为315 mL/r 的定量摆线马达,由(8)式的推导公式可得马达的最大扭矩M为902.41 N · m,可以满足机器最大驱动扭矩要求。
液压马达和液压泵的排量与流量和转速存在如下关系
式中:
q——排量,mL/r;
Q——流量,mL/min;
n——转速,r/min;
η——容积效率,取值0.9。
根据(10)式,代入液压马达排量q为315 mL/r,转场驱动轮最大转速n为138.40 r/min,得到液压马达转场所需流量Q为48 440 mL/min,液压泵的流量与液压马达的流量相等,将液压泵流量Q为48 440 mL/min、液压泵输入转速2 400 r/min 代入(9)式,得到液压泵的排量q为18.17 mL/r。选定排量q为21 mL/r 的变量柱塞串泵,由(10)式的推导公式可得驱动轮的最大转速n为177.78 r/min,根据(6)式得到最高机器转场速度为7.7 km/h,满足机器转场设计速度对液压泵的排量要求。
2.3 施肥部件设计
施肥部件采用螺旋排肥的方式,主要由肥料箱、输肥搅龙链轮、输肥搅龙和输肥槽等构成,如图5所示。其中肥料箱底部开口可调,肥料从肥料箱落到输肥搅龙箱内,输肥搅龙在输肥搅龙链轮的带动下单向转动,带动肥料落到输肥槽内,从而完成施肥作业。
螺旋排肥装置的单圈排肥量是衡量排肥性能的重要指标,其大小直接决定了螺旋排肥装置的总排肥量、排肥均匀性及稳定性[17]。一般情况下,单圈排肥量q为
式中:
D——螺旋排肥器大径,mm;
d——螺旋排肥器小径,mm;
S——螺距,mm;
bt——螺牙平均厚度,mm;
ht——螺牙深度,mm;
Lt——螺牙平均长度,mm;
ρc——肥料容重,g/mm3;
φ——螺旋排肥器填充系数。
根据上式可知,螺旋排肥器的单圈排肥量大小与D、d、S、bt、ρc以及φ这些因素都有关系,通过改变螺旋排肥装置的D、d、S等参数就可以对单圈排肥量的大小进行调整。在排肥过程中,螺旋排肥器的大径与排肥总量存在如下关系
式中:
Qc——肥料排肥总量,t/h;
A——肥料综合特性系数;
K——肥料综合系数;
c——螺距与直径比例系数;
λ——肥料的单位容积质量,t/m3;
ε——倾斜输送系数。在满足施肥量的前提下,旋转轴转速与排肥螺旋大径、施肥量之间存在如下关系
式中:
D——螺旋式排肥器大径,m。
综合施肥量、螺旋排肥器大径和肥料特性等参数,可以确定旋转轴转速n。
2.4 控制系统设计
果园遥控开沟施肥机电控系统原理如图6 所示,主要由手持遥控器、机载控制器、角度传感器、控制电机、电磁离合器、电磁阀、电源等零部件组成。控制系统分为手持遥控器、机载控制器和执行部件三大部分。手持遥控器主要由操作手柄、控制电路和无线发射模块组成。手持遥控器可以通过无线信号发射模块发出开沟施肥机加减速、油门控制、开沟部件的升降、作业离合器的断开闭合的控制信号。

图6 果园遥控开沟施肥机控制系统框架图
机载控制器主要由STM32F103 系列单片机、稳压电路、继电器电路、无线信号接收模块等组成。机载控制器通过无线信号接收模块接收到遥控器的发射信号,并将相关控制信号传递给单片机进行处理。单片机通过继电器驱动模块实现控制电机的转动、停止,电磁离合器的闭合、断开,电磁阀的吸合与断开。机载控制器中的单片机系统在控制两个控制电机的转动和停止时,同时能够分别收到安装在控制电机上的角度传感器对电机轴偏转角度的反馈信号,通过角度传感器的实时反馈来精准控制两个电机的转动,实现开沟施肥机的精确行走。
执行机构中电机选用工作电压12 V 的直流无刷电机,电磁离合器主要参数为电压24 V,扭矩320 N · m,电磁阀工作电压为12 V。
3 性能试验
3.1 试验条件及方法
性能试验中的开沟试验于2022 年11 月在广州市黄埔区九龙镇附近进行。试验当天天气阴,气温14~22℃,无风,空气相对湿度82%,试验地为壤土,绝对含水率19.1%,土壤坚实度1.8 MPa,土壤中不含有较大石块。排肥试验于2023 年1 月在广州市九龙镇广东省弘科农业机械研究开发有限公司厂区进行。排肥试验化肥为球状颗粒复合肥,直径为4 mm 左右,含水率1.22%。测试方法及指标参照农机推广鉴定大纲DT/T 241-2021《有机肥施肥机》、DT/T 174-2019《施肥机》、DT/T 089-2022《开沟机》等规定的开沟、施肥机械作业质量评价试验方法。果园遥控开沟施肥机性能试验场景如图7 所示。


图7 果园遥控开沟施肥机性能试验
3.2 开沟试验
测量果园遥控开沟施肥机的2 个开沟作业行程。每个行程测试长度为20 m,并留有适当的稳定区。性能测试时,相邻行程间隔一定距离,保证测定不受干预。每个行程沿机组前进方向等间距测10 处,共测3 个行程。在原地表跨沟平放一直尺,以沟底中心点到直尺的距离作为该测量点开沟深度。通过测量点的开沟深度计算每个行程的开沟深度平均值,并计算开沟深度稳定性系数,测试和计算的结果如表2 所示。试验结果显示,果园遥控开沟施肥机实际开沟深度和开沟深度稳定性能够满足农机推广鉴定大纲对开沟机械的作业要求。

表2 果园遥控开沟施肥机开沟性能试验结果
3.3 排肥试验
试验时将开沟器、搅拌装置升起,肥料箱内的肥料应大于箱内容积的1/2,将肥料箱下料开口调到最大。施肥机排肥轮以与常用作业相同的速度驱动,取0.5 min 施肥机肥料排出的肥料,称其质量,测量精度为1 g,重复5 次。按标准差和稳定性系数公式计算排肥量稳定性的标准差和稳定性系数,测量和计算结果如表3 所示。试验结果显示,果园遥控开沟施肥机实际排肥量与理论排肥量基本一致,排肥稳定性满足农机推广鉴定大纲对施肥机械的作业要求。
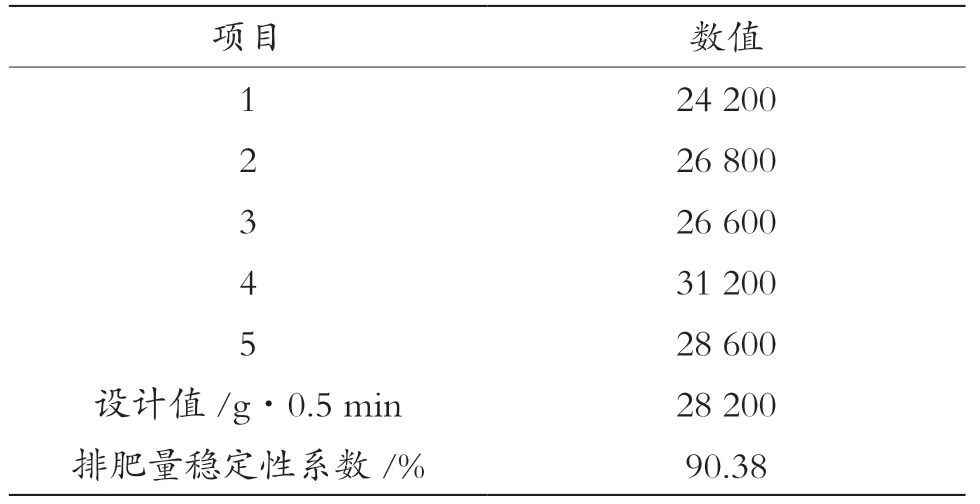
表3 果园遥控开沟施肥机排肥性能试验结果
4 田间试验
试验地点:2023 年2 月,在广州市从化区荔枝园进行试验,田间试验场景如图8 所示。试验条件:当天多云,气温15~21℃,无风,果园果树行距为3.5 m,株距为2 m。试验果园的土地较为平整,土壤为沙壤土并含少量泥黄土,土壤绝对含水率为12.5%。

图8 果园遥控开沟施肥机田间试验
试验材料:球状颗粒复合肥。试验参数:果园遥控开沟施肥机以0.8 km/h 的速度进行开沟施肥作业,开沟深度范围设定为(35±2)cm。
现场进行了3 个行程的开沟施肥覆土试验,试验结果如表4 所示。试验结果表明,果园遥控开沟施肥机的开沟深度稳定系数最小值为91.86%,相关指标符合农机推广鉴定大纲对开沟施肥机械的作业要求。

表4 果园遥控开沟施肥机开沟田间试验结果
5 结论
1)设计了一种果园遥控开沟施肥机,可以一次性完成果园开沟、施肥和覆土作业。该机采用了履带液压电控驱动,不仅提高了机器在丘陵果园的通过性能,还实现了远程遥控,改善了操作人员的作业环境。
2)性能试验表明,果园遥控开沟施肥机各工作部件运行良好,开沟深度和施肥量符合设计要求,开沟深度稳定性系数≥96.56%,排肥稳定性系数为90.38%,田间试验开沟深度稳定性≥91.86%。性能试验和田间试验结果表明该遥控开沟施肥机能够满足果园的开沟施肥要求。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
农业工程学报(2022年1期)2022-03-25
中阿科技论坛(中英文)(2021年2期)2021-03-17
装备维修技术(2021年42期)2021-03-15
中国新技术新产品(2020年4期)2020-05-05
农机化研究(2018年8期)2018-07-10
科技创新导报(2016年27期)2017-03-14
中国农业文摘-农业工程(2016年5期)2016-04-12
江苏农机化(2015年6期)2015-12-07