
混联式HEV双模糊能量管理策略研究
2023-07-10 20:44:17陈俊霖刘胜永
广西科技大学学报 2023年1期
陈俊霖 刘胜永

摘 要:为降低混联式混合动力汽车的油耗,以提高整车燃油经济性和动力部件工作效率以及使整车具有良好的电量维持性为控制目标,提出一种基于双模糊控制的能量管理策略:串联模糊控制器以电量偏差和整车需求功率为输入,以发动机输出功率为输出,控制发动机一直工作在低油耗区;并联模糊控制器以电量偏差、需求扭矩偏差和发动机转速为输入,以发动机输出扭矩为输出,调整发动机工作状态。以全球轻型汽车测试循环为目标循环工况,仿真结果表明:所提出的双模糊能量管理策略有效改善了动力部件工作点,使之尽可能工作在高效率工作域内,提升了混合动力系统的总体效率,与单模糊策略相比,百公里燃油消耗下降了1.78%,动力电池满足电量平衡要求且电量偏差更小,混联式HEV具有更好的燃油经济性和电量维持性。
关键词:混联式HEV;双模糊控制;能量管理策略;电量平衡
中图分类号:TP273 DOI:10.16375/j.cnki.cn45-1395/t.2023.01.009
0 引言
混合动力汽车(hybrid electric vehicle,HEV)被认为是现阶段可实现节能减排的有效解决方案之一[1]。由于HEV配置了2种及2种以上动力源,其动力系统是一种复杂的非线性时变系统,会随着工况变化自适应调整工作状态,因此,需要制定相应的能量管理策略(energy management strategy,EMS)来解决动力部件间的协同及功率流向的能量管理问题[2]。
EMS是HEV研究领域的重点和难点,其性能优劣直接决定了整车燃油经济性的优劣[3-5]。能量管理目标主要有提升系统工作效率、降低整车油耗以及提高能量利用率等[6-8]。我国最早应用的EMS是逻辑门限策略,该策略基于负荷平衡思想,通过电机调整发动机工作点,结合发动机万有特性、电机万有特性、车速等参数界定发动机工作域,并设定一组阈值提升其工作效率,进而提升整车燃油经济性[9-10]。该策略虽能提升发动机工作效率,但控制目标较为单一,难以兼顾工况变化的影响。模糊控制策略具有较好的鲁棒性、实时性及控制精度,策略执行时不依赖于准确的数学模型,是一种极其适用于HEV这类非线性时变系统的EMS[11]。文献[12]使用PI控制器建立驾驶员行为识别模型,硬件在环实验结果显示该策略优化了并联式HEV的性能。文献[13]提出一种基于频率解耦的模糊EMS,该策略实现了更低的整车能耗,延长了电池使用寿命。文献[14]提出了基于再生制动的模糊EMS,硬件在环实验结果显示混合动力系统的协同性较高。文献[15]用遗传算法优化了模糊规则,硬件在环实验结果表明整车油耗降低了0.13 L/(100 km)。
本文针对一款混联式HEV,设计以降低油耗、提高系统工作效率、维持电池电量平衡为目标的智能控制策略。首先分析了混联式HEV的动力总成结构,针对工作模式的差异设计了2个模糊控制器:①串联模式下发动机转速与轮端车速解耦,因此串联模糊控制器以整车需求与电量偏差为输入,以发动机输出功率为输出,控制发动机一直工作在低油耗区;②并联模式下发动机转速与轮端车速耦合,因此并联模糊控制器以电量偏差、需求扭矩偏差与发动机转速为输入,以发动机输出扭矩为输出,调整发动机状态,使之工作在低油耗区。最后基于Cruise和Matlab平台建立仿真模型,评价双模糊EMS的控制效果。
1 混合动力系统结构及建模
1.1 混联式HEV的动力总成结构
本文研究对象是一款混联式HEV,其动力总成包括发动机、发电机、驱动电机及动力电池等部件,其中发电机负责发电和调节发动机转速,驱动电机负责提供驱动力和制动能量回收,其构型如图1所示。离合器作为动力耦合装置,控制着发动机的能量流向,根据能量流向可将混联式HEV的混合动力模式划分为串联模式及并联模式:串联模式下,离合器断开,发动机输出能量给发电机发电,再结合电池荷电状态(state of charge,SOC),将电能灵活分配到驱动电机与电池组;并联模式下,离合器闭合,发动机输出的能量直接用于驱动整车,电池根据SOC辅助驱动整车。
1.2 动力部件建模
1.2.1 整车模型
主要研究EMS对燃油经济性的影响,因此整车模型只考虑车辆的纵向运动,忽略横向运动及垂向运动的影响。在实际中,由汽车行驶方程计算的行驶阻力与实际行车阻力存在着较大偏差,因此采用实测的滑行阻力曲线来代替理论计算中的空气阻力和滚动阻力,使整车模型更趋向于实车。实测数据拟合的整车纵向运动阻力方程为:
[F=f0+f1v+f2v2+δmdvdt .] (1)
式中:F为整车驱动力;v是行驶速度;[δ]为旋转质量换算系数;m为整备质量;[f0、f1、f2]为测试车辆的道路载荷系数;前三项之和即为车辆的空气阻力、滚动阻力之和。
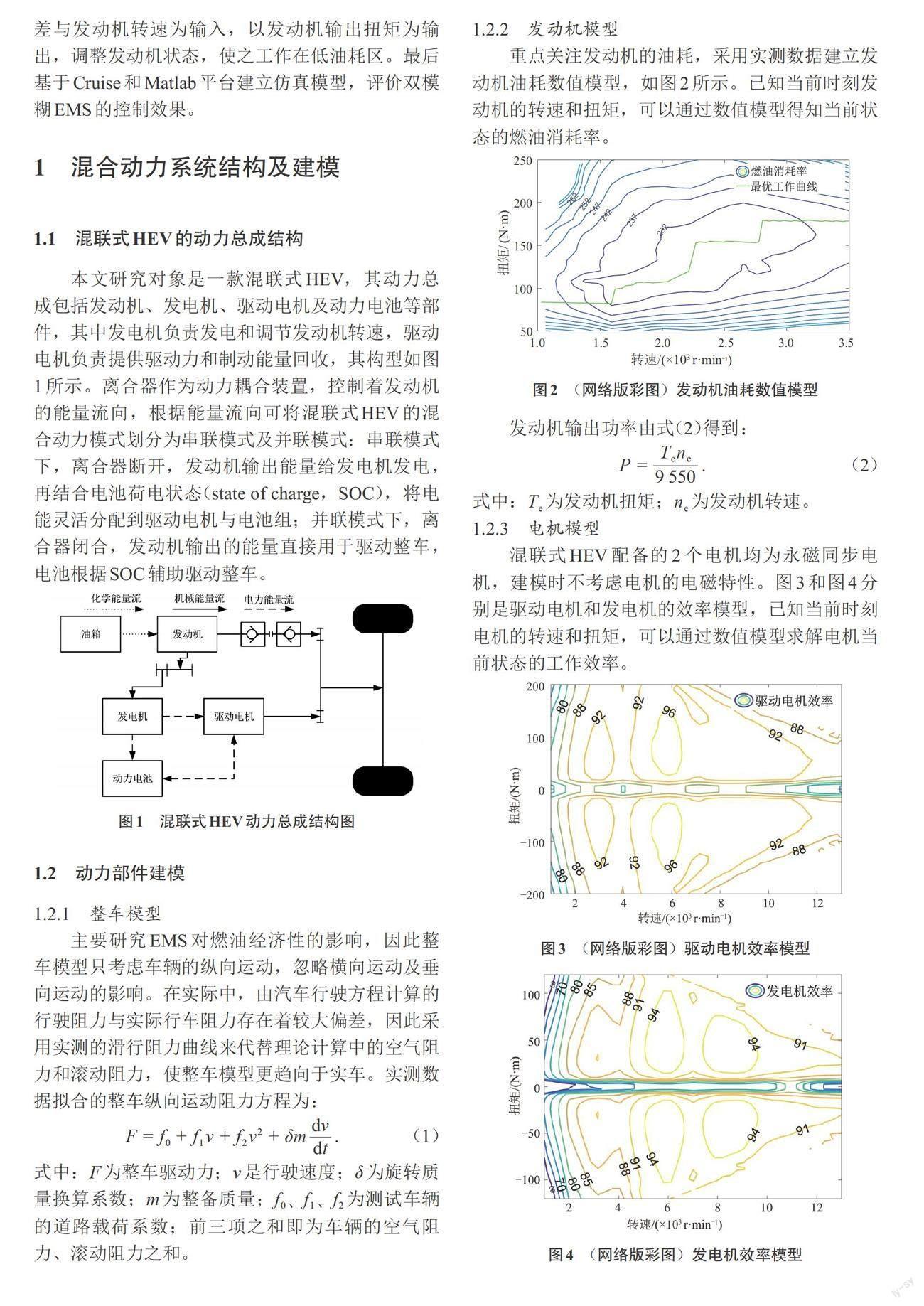
1.2.2 发动机模型
重点关注发动机的油耗,采用实测数据建立发动机油耗数值模型,如图2所示。已知当前时刻发动机的转速和扭矩,可以通過数值模型得知当前状态的燃油消耗率。
发动机输出功率由式(2)得到:
[P=Tene9 550 .] (2)
式中:[Te]为发动机扭矩;[ne]为发动机转速。
1.2.3 电机模型
混联式HEV配备的2个电机均为永磁同步电机,建模时不考虑电机的电磁特性。图3和图4分别是驱动电机和发电机的效率模型,已知当前时刻电机的转速和扭矩,可以通过数值模型求解电机当前状态的工作效率。
电机功率可由式(3)得到:
[P=TMnM9 550ηM, 驱动状态,TGnGηG9 550, 发电状态.] (3)
式中:[TM、TG]分别为驱动电机扭矩和发电机扭矩;[nM、nG]分别为驱动电机转速和发电机转速;[ηM、ηG]分别为驱动电机效率和发电机效率。
1.2.4 动力电池模型
以等效电路法建立动力电池模型,其输出电压[Ub]和电流Ib为:
[Ub=Uoc(SOC)-Rb(SOC)Ib(SOC), Ib=Uoc(SOC)-U2oc(SOC)-4Pb(SOC)Rb(SOC)2Rb(SOC).]
(4)
式中:[Uoc]为开路电压;[Rb]为电池内阻;[Pb]为电池输出功率。
SOC是动力电池的关键指标,也是制定EMS的关键状态量,SOC的状态方程如式(5)所示,由输出电流方程和安时积分法推导得出。
[SOCt=SOC0-IbdtQc]. (5)
式中:SOC0为电量初始值;Qc为电池的最大容量。
2 能量管理策略设计
2.1 模式切换控制
混联式HEV具有纯电、串联、并联和能量回收4种工作模式。在一个驾驶循环内车辆会发生多次模式切换,模式切换的控制逻辑如图5所示。车速V小于下阈值[Vlow]时整车进入纯电模式;V大于[Vlow]且整车需求扭矩[Treq]小于0时进入能量回收模式;V大于[Vlow]、小于上阈值[Vhigh]且[Treq]大于0时进入串联模式;V大于[Vhigh]且[Treq]大于0时进入并联模式。
2.2 双模糊控制器的设计
由于配备的电机效率较高,高效率区域分布较广,可用电机平衡发动机的功率负荷,使发动机工作点尽可能落于经济区域内,并在驾驶循环内保持电池SOC平衡。因此,能量管理策略的控制目标为:
①减少能量损耗,提高驱动能量有效利用率。串联模式根据整车需求动态调整发动机工作在最优工作曲线上,减少能量转换过程的损耗;并联模式根据整车需求调节发动机输出扭矩,避免发动机严格跟踪最优工作曲线造成能量输出过剩所产生的电池被动充电现象。
②主动维持电池SOC平衡。SOC太高会减少能量回收的空间;SOC太低则会影响整车动力性。
双模糊控制的控制逻辑图如图6所示。
2.2.1 变量论域的确定
将驱动电机需求功率Preq和电量偏差△SOC1作为串联模糊控制器的输入量;将电量偏差△SOC2、需求扭矩偏差△T、发动机转速ne作为并联模糊控制器的输入量。将发动机输出功率P和发动机扭矩T1分别作为串联模糊输出量与并联模糊输出量。
电量偏差△SOC1, 2表述为:
[△SOC1, 2=SOCt-SOC0]. (6)
式中:[SOCt]为任意时刻的电量;[SOC0]为初始电量。
需求扭矩偏差△T表述为:
[?T=Treq(t)-Topt(t)]. (7)
式中:[Treq(t)]为当前时刻的整车需求扭矩;[Topt(t)]为发动机当前时刻的最优扭矩。
将△SOC1和Preq划分为7个模糊子集,将△T、△SOC2以及P、T1划分为5个模糊子集,将ne划分为3个模糊子集,并用相应名称对应,如表1—表3所示。
2.2.2 隶属度函数的确定
在满足混联式HEV动力性需求的前提下,将三角形隶属度函数作为各个变量的隶属度函数,如图7—图9所示。
2.3 模糊规则设计
2.3.1 串联模糊规则设计
串联模糊控制器的输入量△SOC1和Preq都有7个模糊子集,可设计模糊规则49条。规则设计如表4所示,所选取的模糊控制规则的形式为:
[Rule:If x1 is Ai1 and x2 is Ai2 ,Then u is Bi;i=1,2,…]
其中:[x1、x2]为输入量;u为输出量。
串联模糊规则的制定依据如下:
1)串联模式主要以电能驱动为整车驱动能源,此模式将发动机从轮端解耦出来,可灵活调节发动机的工作点,使其尽可能工作于高效率区;
2)△SOC1为正值时,动力电池作为整车主要驱动能量源,发动机作为辅助能量源;△SOC1为负值时,整车驱动能源主要由发动机燃油带动发电机发电提供,利用富余的能量给动力电池充电。
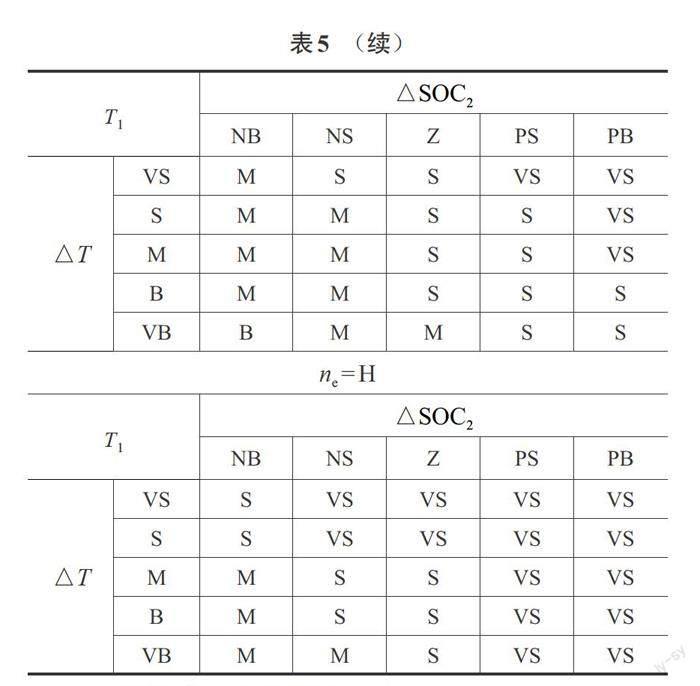
2.3.2 并联模糊规则设计
并联模糊控制器的输入量△SOC2、△T和ne分别有5个、5个和3个模糊子集,可设计模糊规则75条。规则如表5所示,所选取的模糊控制规则的形式为:
[Rule: ][If x1 is Ai1 and x2 is Ai2 and x3 is Ai3 , Then u is ]
[Bi;i=1,2,…]
其中:[x1、x2]、[x3]为输入量;u为输出量。
并联模糊规则的制定依据如下:
1)当△SOC2為正值时,电能作为整车主要的驱动能量,发动机可根据工况需求灵活选择辅助驱动车辆或不工作;当△SOC2为负值时,整车动力主要由发动机燃油提供,驱动电机根据工况需求灵活选择不工作或行车充电。
2)根据发动机MAP可知,在高转速阶段发动机最优工作曲线对应的扭矩过大,动力电池容易处于被动充电状态,进而产生过充现象,因此模糊控制器要动态调整发动机工作点下移。
3 仿真结果及分析
基于MATLAB/Simulink平台搭建双模糊EMS,与基于Cruise平台搭建的混联式HEV模型进行联合仿真,采用Interface模块实现2个平台的联合仿真。选取全球轻型汽车测试循环(world light vehicle test cycle,WLTC)工况作为仿真工况,仿真结果与逻辑门限EMS、单模糊EMS进行对比分析。整车参数设计如表6所示。
全球轻型汽车测试循环工况车速对比如图10所示。图10(a)、(b)分别是3种EMS跟踪WLTC工况车速对比图和车速局部跟踪图,由图10可知,本文所提出的双模糊EMS控制下的整车仿真车速可以很好地跟踪工况要求车速。
图11(a)、(b)、(c)分别为相同工况不同EMS控制下的动力部件工作状态。通过对比3种策略下的发动机工作状态可知,相较于逻辑门限EMS与单模糊EMS,双模糊EMS作用下的发动机工作点更集中于发动机MAP中心的低油耗工作域内,表明双模糊EMS的控制效果更好,发动机总体效率更高;将不同策略作用下的驱动电机工作点导入建立的驱动电机效率模型,可见双模糊EMS作用下的驱动电机工作点更为集中,无论是正转驱动整车还是反转能量回收,工作点都集中在高效率区内;分析发电机工作状态可知发电机工作效率较高。
图12为电池SOC的变化曲线。由图12可知,初始电池SOC设定为65.00%,双模糊EMS的循环终了值为65.24%,逻辑门限EMS的循环终了值为65.45%,单模糊EMS的循环终了值为64.63%,可见设计的双模糊EMS控制下的电量偏差较小,具有更好的电量维持性。分析曲线可知,在双模糊EMS作用下动力电池SOC变化趋势平缓,处于浅充浅放状态,避免了电池的过充过放现象,对延长电池使用寿命起到积极作用。
表7为WLTC工况下,3种EMS作用下的仿真油耗对比及电量偏差结果。与逻辑门限EMS和单模糊EMS相比,双模糊EMS的百公里燃油消耗分别下降了3.16%和1.78%,电量偏差更小。
4 结论
本文设计并验证了混联式HEV双模糊控制器,包括串联模式和并联模式2个部分。仿真试验结果表明,双模糊EMS优化了混联式HEV动力部件工作状态,使之工作在高效率工作区间内,提升了混合动力系统的总体效率,整车油耗较其他2种EMS分别降低了3.16%、1.78%,具有更好的燃油经济性;双模糊EMS的电池SOC变化趋势平缓,满足非插电式HEV的电量平衡要求,且动力电池工作在浅充浅放状态,对延长电池使用寿命起到积极作用。因此,针对混联式HEV设计的双模糊EMS不仅具有较好的燃油经济性及电量维持性,还提高了混合动力系统的工作效率。
参考文献
[1] WANG S H,HUANG X S,MARIA LOPEZ J,et al. Fuzzy adaptive-equivalent consumption minimization strategy for a parallel hybrid electric vehicle[J].IEEE Access,2019,7:133290-133303.
[2] RUAN S,MA Y.Real-time energy management strategy based on driver-action-impact MPC for series hybrid electric vehicles[J].Complexity,2020,7:1-15.
[3] 朱東彬,王喜洋,李艳文.混合动力电动汽车能量管理策略研究进展[J].机械设计与制造,2020(3):293-296.
[4] 唐智,范晶晶,魏鹏程,等.基于动态规划的混联式混合动力客车能量管理控制策略研究[J].重庆理工大学学报(自然科学版),2019,33(3):59-65.
[5] ZHANG F,HU X,TENG L,et al.Computationally efficient energy management for hybrid electric vehicles using model predictive control and vehicle-to-vehicle communication[J].IEEE Transactions on Vehicular Technology,2021,70(1):237-250.
[6] HAN S,ZHANG F,XI J. A real-time energy management strategy based on energy prediction for parallel hybrid electric vehicles[J].IEEE Access,2018,6:70313-70323.
[7] WANG S,LIN X.Eco-driving control of connected and automated hybrid vehicles in mixed driving scenarios[J]. Applied Energy,2020,271:115233.
[8] 王琦,刘胜永,郑致飞.基于模糊控制的纯电动汽车能量管理策略研究[J].广西科技大学学报,2021,32(2):83-88,106.
[9] 赵秀春,郭戈.混合动力电动汽车能量管理策略研究综述[J].自动化学报,2016,42(3):321-334.
[10] 王志勇,韩善灵,张鑫,等.插电式混合动力汽车能量管理策略发展综述[J].科学技术与工程,2019,19(12):8-15.
[11] SUHAIL M,AKHTAR I,KIRMANI S,et al.Development of progressive fuzzy logic and ANFIS control for energy management of plug-in hybrid electric vehicle[J].IEEE Access,2021,9:62219-62231.
[12] CHEN P T,YANG C J,HUANG K D.Development of energy control system for parallel hybrid power system using dynamic equations and fuzzy theory[J].Advances in Mechaical Engineering,2020,12(11):1-13.
[13] TAO F,ZHU L,FU Z,et al.Frequency decoupling-based energy management strategy for fuel cell/battery/ultracapacitor hybrid vehicle using fuzzy control method[J].IEEE Access,2020,8:166491-166502.
[14] SINGH K V,BANSAL H O,SINGH D.Feed-forward modeling and real-time implementation of an intelligent fuzzy logic-based energy management strategy in a series-parallel hybrid electric vehicle to improve fuel economy[J]. Electrical Engineering,2020,102(2):967-987.
[15] XU Q,LUO X,JIANG X,et al.Research on double fuzzy control strategy for parallel hybrid electric vehicle based on GA and DP optimization[J].IET Electrical Systems in Transportation,2018,8(2):144-151.
Research on dual-fuzzy energy management strategy of hybrid HEV
CHEN Junlin1, 2, LIU Shengyong*1, 2
(1. School of Automation, Guangxi University of Science and Technology, Liuzhou 545616, China;
2. Guangxi Key Laboratory of Auto Parts and Vehicle Technology
(Guangxi University of Science and Technology), Liuzhou 545616, China)
Abstract: An energy management strategy was proposed with the objectives of increased fuel economy of the vehicle, improved working efficiency of power components, and good power maintenance so as to reduce the fuel consumption of hybrid electric vehicle. The series fuzzy controller took the electric quantity deviation and the required power of the whole vehicle as the input, and the engine output power as the output to control the engine to always work in the low fuel consumption area; the parallel fuzzy controller took the electric quantity deviation, the demanded torque deviation and the engine speed as the input, and the engine output power as the output. The output torque was the output, which adjusted the working state of the engine. Taking the global light vehicle test cycle as the target cycle condition, the simulation results show that the proposed dual-fuzzy energy management strategy could effectively improve the working point of the power components, made them work in the high-efficiency working area as much as possible, and improved the overall efficiency of the hybrid system. Compared with the single fuzzy strategy, the fuel consumption per 100 kilometers decreased by 1.78%, the power battery met the power balance requirements and the power deviation was smaller, and the hybrid HEV had better fuel economy and power maintenance.
Key words: hybrid HEV; dual fuzzy control; energy management strategy; power balance
(責任编辑:黎 娅)
