失速告警系统应用异构双核处理器的安全性分析研究
2023-07-06 12:41宣晓刚魏璐达贾少龙张美仙
计算机测量与控制 2023年6期
宣晓刚,魏璐达,贾少龙,杨 飞,张美仙
(太原航空仪表有限公司,太原 030006)
0 引言
飞机失速会导致飞机失控,引发飞行事故。为保证飞行安全,民航局规定需要在民用飞机上加装失速告警系统(SWS,stall warning system)[1-2]。飞行员通过失速告警系统获得飞机运行时的失速告警、保护信息,以及相应的控制指令,执行相应的操作,确保飞机不进入失速危险状态。失速告警系统中的核心控制部件,即失速告警计算机的设计就显得尤为重要。
传统的失速告警计算机基本上都是采用单核处理器,如欧美、俄罗斯等国家的军用和民用飞机上加装的失速告警计算机,或者会采用多处理器同步时钟的方法构建余度告警计算机,并采用双余度失速告警计算机的方法来满足适航法规对安全性的要求。
如今,仅通过提高单核处理器时钟频率的手段来提升计算速度与安全性能已无法满足目前的需求。而将两个处理器内核整合在同一个芯片上,可大大提升计算处理性能。相比于单核处理器,多核处理器无论在结构设计、能耗以及安全性设计等方面都有着巨大优势。出于对失速告警计算机安全性、满足适航性及输出数据可信度的考虑,需将多种飞行参数引入失速告警计算机用于对失速的判断,提出了一种基于异构双核处理器的失速告警计算机的设计方案。
在航空电子产品设计中一般会应用到SAE ARP4761进行安全性分析,但其某些分析方法具有复杂性和难以模拟仿真。但随着IEC 61508功能安全国际标准的正式发布,使得人们越来越关注功能安全要求。这些标准可以对安全关键系统的非功能属性进行有效分析和评估,分析所得结果能给设计者提供所需的信息和设计指导,使得设计者在系统设计阶段可以尽早对系统安全性进行分析与评估[3-4]。
因此,应用IEC 61508标准作为失速告警计算机设计的依据,为其安全性分析研究提供了有力保证。
1 失速告警计算机功能及设计
失速告警系统通过在飞机接近失速时向飞行员发送告警和控制信息,确保飞行员及时操纵飞机,使飞机迅速恢复到正常状态来保证飞行安全[2]。失速告警系统一般由迎角传感器、失速告警计算机、告警装置等组成[1]。其中,迎角传感器用于采集飞机迎角信号并发送给失速告警计算机。振杆器作为告警装置根据失速告警指令进行抖振来提醒驾驶员进行操作,避免飞机进入失速状态。
失速告警计算机作为失速告警系统中的核心控制部件,通过迎角传感器采集飞机迎角信息修正得出真迎角,并接收机上其他系统发送的马赫数、高度、襟缝翼构型、结冰等信息,判断飞机真迎角是否接近气动失速,并在接近气动失速时发出失速告警、自动点火和失速保护指令,为飞行员提供告警指示,保护飞机不进入失速危险状态。
失速告警计算机设计具有以下功能:
1)为迎角传感器提供激励信号,接收迎角传感器输出的两路迎角信号,根据采集的信号数据计算飞机局部迎角,同时对迎角传感器的加温状态进行监控;
2)通过数据总线接收外部输入数据;根据接收的数据信息解算真实迎角、临界迎角和失速速度;
3)当真实迎角接近临界迎角或空速接近失速速度时,输出告警驱动信号给同侧振杆器和灯光、音响系统,提醒飞行员采取措施;同时输出告警状态给机组告警系统;
4)当真实迎角继续增大到失速保护控制迎角,发出保护指令给推杆器,同时发出保护状态给机组告警系统;当真实迎角小于失速保护控制迎角一定数值时,停止发出保护指令和保护状态;
5)当真实迎角继续增大至点火迎角,持续发出点火指令给左和右发动机;同时发出点火状态给机组告警系统;若真实迎角小于点火迎角一定数值时,停止发出点火指令和点火状态。
2 功能安全标准介绍及其发展
2.1 SAEARP 4761相关介绍及其发展
美国汽车工程师学会(SAE,society of automotive engineers)于1996年发布了SAEARP 4761 《民用机载系统与设备的安全评价过程实施指南方法》,ARP 4761引入了飞机级安全评估的概念,提出了对民用飞机认证进行安全评估的指南和方法,以及确定了表明适航性的系统方法[5]。它主要用于表明系统符合FAR/JAR 25.1309有关的条款。
ARP 4761 文件提供了进行行业公认的安全评估的指南,包括功能危害评估FHA、初步系统安全评估PSSA 和系统安全评估SSA。本标准还提供了有关进行安全评估所需的安全分析方法的信息。这些方法包括故障树分析FTA、因果关系图DD、马尔可夫分析MA、失效模式和影响分析FMEA、失效模式和影响总结FMES 和共因分析CCA(CCA 由区域安全分析ZSA、特定风险分析PRA 和共模分析CMA 组成)[5]。ARP 4761文件中提供的指南和方法旨在与其他适用的指南一起使用,包括ARP 4754A,RTCA/DO-178,RTCA/DO-254,以及与FAR/JAR 25.1309相关的咨询文件。自ARP 4761发布以来,在全球航空业得到了广泛应用,并成为获取适航批准过程中的事实标准。经过20多年的工业实践,目前已经发布了ARP 4761A。
为了在工业领域更好地使用ARP 4761,SAE 于1997年将SAEARP926《故障/失效分析方法》更新到B 版,明确使用ARP 4761作为飞机安全性评估的方法。ARP 926B中明确提出了诸如共模分析CMA 的分析方法等某些分析方法的复杂性和难以模拟仿真的问题,因此该标准对新技术的使用也是开放式的,在其附录C 中申明了在未来使用更加适用的新分析技术。
2.2 IEC 61508相关介绍及其发展
国际电工委员会(IEC,international electrolechnicai commission)于1998年发布了第一版IEC61508标准,该标准针对电气/电子/可编程电子部件(E/E/PE)和系统,并于2010年更新至第二版[6-7]。IEC61508标准基于系统和随机故障的性能目标,涵盖了安全管理、系统/硬件设计,软件设计、生产和安全关键E/E/PE 系统的操作。因其广泛的适用性使得大到整个系统小到零部件,都可以参考该标准来提升系统或零部件的安全性能[8]。
IEC61508对E/E/PE系统和软件有特定的要求。在第一版中,没有识别除硬件以外的系统,而在第二版中,引入了“ASIC”的硬件组件要求。但IEC 61508对ASIC的定义并不是百分之百准确,它可以解释为包括许多产品:例如为特定安全系统设计的定制IC,为安全系统类型设计的半定制IC和FPGA、PLD和CPLD器件。
IEC61508标准共分为8个部分:第0部分为技术报告,介绍了功能安全和IEC 61508;第1部分为一般要求;第2部分为E/E/PE 系统要求;第三部分为软件要求,第4部分为定义和缩写;第5部分为安全完整性等级测定方法示例;第6部分为IEC 61508-2和IEC 61508-3应用指南;第7部分为技术措施概述[7,9]。
2.3 ARP 4761和IEC 61508在安全性分析方法上的差异
ARP 4761描述了民用飞机适航合格审定的安全性评估指南和方法[9]。该标准安全性评估的对象是机载系统及其失效问题,适用于支持机载系统的安全性设计和适航审定。该标准所提出的民机系统安全性评估过程是一个自上而下的分析过程:以飞机级功能危险分析为起始,再到系统级功能危险分析,并在故障树分析中把系统级功能危险分析的结果作为顶事件,最后进入PSSA 的过程[10]。但ARP 4761中安全性分析方法有以下不足:1)仅考虑组件之间直接的功能交互;2)欠缺危险因素与人为因素之间相互影响的安全性分析;3)各种安全性分析仍偏重于概念、实施原则的顶层描述,缺少分析程序,难以细化和应用到具体的案例中[9,11]。
而IEC61508标准对安全完整性进行了定义,表明安全完整性是在规定条件下、规定时间内,安全相关系统成功实现所要求的安全功能的概率[12]。为量化安全完整性,IEC61508定义了安全完整性等级的概念。安全完整性等级是一个重要指标,它用于规定电气/电子/可编程电子部件(E/E/PE)和系统的安全功能的安全完整性要求,并作为一个必要措施,规定了安全系统在安全性上必要风险降低的概率。IEC 61508作为国际安全标准,将安全完整性等级分为4个等级,分别为SIL4、SIL3、SIL2、SIL1等级划分表明:SIL等级越高,系统的安全性能就越高[7-8,13-14]。并 且IEC61508中描述了计算PFD(probability of dangerous failure on demand)和PFH(average frequency of a dangerous failure per hour)的基本原理,解释了公式的导出过程。
在低要求模式下需使用PFDavg(average probability of dangerous failure on demand)评价安全完整性等级,而高要求和连续模式使用PFH 来评价评价安全完整性等级。因此能够根据实际需求进行精确的计算,且能符合实际应用中各种假设和应用条件,对安全性设计分析给出了相关依据。
因此,本文在对失速告警系统的安全性分析上选择依据IEC 61508标准。
3 处理器技术发展
3.1 单核处理器
单核处理器将一个芯片集成在一个处理器中。通常,传统方法提升单核处理器的主频性能是通过增大数据宽度来实现[15]。但随着技术的发展,单核处理器主频的提升已达到工艺加工的极限。除此之外,单核处理器的局限性还有以下几点:1)单核处理器的单一线程不能提高系统的并行能力,并且处理速度比双核或多核处理器慢;2)处理器主频的提升也增加了功耗,加大了散热量,并且目前没有适配的散热系统处理散热,来确保处理器工作正常稳定;3)在计算或功能处理要求较高的情况下,单核处理器有很多缺陷和不足[16]。
总之,频率、功耗和设计各方面均限制了单核处理器的性能的提升和发展[16]。而多核处理器把任务合理分配后利用多个内核协同处理,解决了以上问题[17]。
3.2 多核处理器
多核处理器(CMP,chip multiprocessor)将多个处理器集成在一个芯片中。并根据芯片中集成内核的结构是否相同,可将多核处理器分为同构多核处理(homogeneous multi-core processor)和异构多核处理器(heterogeneous multi-core processor)。同构多核处理器将两个或多个结构、地位对等的内核集成在一个芯片中[18]。而异构多核处理器则将不同架构或特性的内核集成在一块处理器上,并且可根据不同的计算任务,将其分配给不同的内核进行计算、处理,双核并行处理方式使得处理器执行复杂任务效率更高,资源配置更加合理[19-20]。双核CPU 基本架构如图1所示。

图1 双核CPU 基本架构
在航空产品中,失速告警计算机对于可靠性和安全性的要求较高。文中失速告警计算机的设计采用异构双核处理器,该处理器可通过异构双核处理器中的数据共享内存机制进行数据共享和交互,从而任务的处理和执行更加高效。
4 失速告警计算机安全性分析与研究
4.1 处理器安全性分析
为保证硬件故障容错能力,IEC 61508标准提出了一系列技术手段。其中,提高系统可靠性和可用性的一个重要手段就是采用冗余结构,冗余结构包括N取M冗余架构、冗余校验等[8,13]。下面着重介绍N取M冗余架构。
N取M冗余架构也被称作冗余表决结构,一般记作“MooN”,表示“Mout ofN”,即从N中取M,冗余数K=N-M。N中取M冗余架构要求架构中共有N个单元,但至少有M个单元正常工作时,系统才能正常工作[14]。MooN 结构系统可靠性如图2所示。图中λD代表子系统中通道的危险失效率(每小时)。
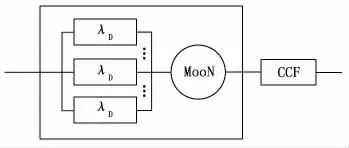
图2 Moo N结构系统可靠性框图
常见的冗余表决结构有 “1oo1”、“2oo2”、“1oo2D”等。冗余通道的存在使得有故障出现时,还有备用设备可以暂时维持系统的正常运转,这样的做法提高了系统安全性和可用性。但是冗余通道越多,系统就越复杂,并且不同通道之间是否存在相互影响的关系也会很难分析,增加了系统的误操作率,即会增加系统的安全失效率,同时还会引入共因失效的问题。因此,并不是冗余通道越多越好,还需根据实际情况分析系统的可靠性和可用性之后再选择不同的冗余架构[8]。
共因失效(CCF,common cause failure)是指由于某种相同的原因导致系统中两个或多个部件失效或故障。虽然冗余架构可以有效提高系统的可靠性[4,7],但是在产品的设计、运行和维护各阶段,由于内因或者外因均可能引起共因失效,共因失效率与系统结构有关,即与冗余架构的通道数有关[21-22]。
4.1.1 基于单核处理器的失速告警系统的安全性分析
对于失速告警系统,不允许单点故障,因此通常采用2台失速告警计算机构成 “1oo2”系统,但出于对运营成本等约束条件的考虑,系统一般会采用2台相同的失速告警计算机进行设计,故而对于单台失速告警计算机就可以等效为“1oo1”结构。该结构只由一个通道构成,通道的任何危险失效都将引起降低失速告警系统的安全功能[8]。“1oo1”物理框图如图3所示,“1oo1”可靠性块图如图4所示。
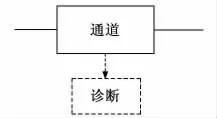
图3 “1oo1”物理框图
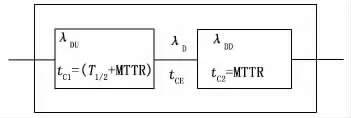
图4 “1oo1”可靠性块图
图4表明,单个通道可以被认为由两部分组成:一部分具有由未被检测到的失效导致的失效率λDU,另一部分具有由已被检测到的失效导致的失效率λDD,λD表示为整体失效率,整体失效率λD与个体失效率λDU和λDD的关系是:
通道的等效平均停止工作时间为tCE,等于两部分各自的停止工作时间tc1和tc2相加,它与各部分对通道失效概率的贡献直接成比例:
式中,T1表示手动检查测试的时间间隔。对于一个具有由危险失效而导致关闭时间为tCE的通道:
PFD是指安全相关系统被要求时执行安全功能的失效概率,即安全功能的不可用性。上式中,PFDavg是PFD在给定时间段内的平均值。
因此,对于 “1oo1”结构,在要求时的平均失效概率为:
考虑到MTTR与T1相比,数量级差别较大,公式可以进一步简化为:
PFH的含义是给定时间内安全相关系统执行安全功能的平均危险失效频率。假设在高要求或连续模式下,需计算PFH,当诊断模块检测出危险故障时,立即驱使受控设备(EUC,equipment under control)进入安全状态。因此得出“1oo1”结构的PFH为:
此外,失速告警系统中还需对振杆器进行操纵,对于单核处理器,其控制电路如图5所示。
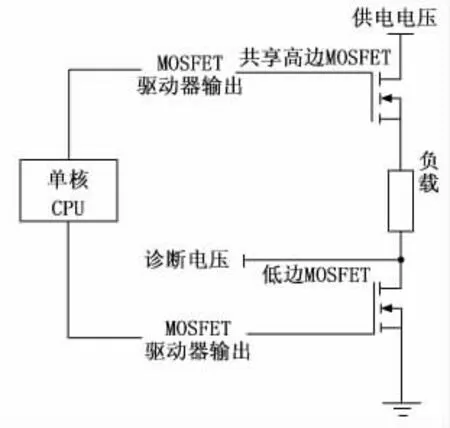
图5 单核处理器下振杆器硬件控制电路
由于采用单核处理器,在需要导通MOSFET 时,单核处理器将同时导通高边/低边MOSFET。如果处理器存在故障,则有相应的概率会同时导通或截止高边/低边MOSFET,即使有相应的检测短路接地故障向MCU 发送信号,也无法阻止错误的导通或截止高边/低边MOSFET。因此,该设计缺乏处理器对这个单点故障的诊断覆盖。虽然在系统级采用了 “1oo2”的架构,但是对于成本约束而采用的相似失速告警计算机的设计上,在系统架构设计中仍无法避免共模故障的存在。
4.1.2 基于异构双核处理器的失速告警系统的安全性分析
而对于采用异构双核处理器设计的单台失速告警计算机,可等效于两种非相似计算机,其共模失效可简化为“与”的架构,其等效于 “1oo2D”架构。“1oo2D”架构的输出与其它架构不同,该架构是在 “1oo2”架构的基础上增加了诊断功能。当诊断到两个通道中的任一通道出现故障,则输出切换到另一通道采用备用通道进行正常输出控制信号。当诊断到两个通道同时出现故障,或者检测到两个通道的信号存在差异并且不确定是哪个通道故障时,输出将会进入安全状态。该结构模式下,任何一个通道都能够通过一种独立于另一个通道的方式获取另一个通道的状态[23]。此架构能够有效保证系统设计的高安全性和高可靠性。“1oo2D”物理框图如图6所示,“1oo2D”可靠性块图如图7所示。
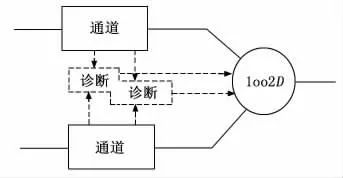
图6 “1oo2 D”物理框图
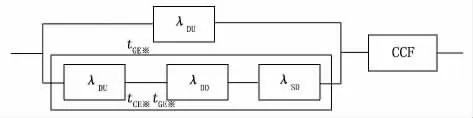
图7 “1oo2 D”可靠性块图
λSD表示为可诊断安全失效率,每个通道中被检测的安全失效概率如下:
本架构等效平均停止工作时间的值与其他架构给出的数值不同,因此他们被表示为t′CE与t′GE。
“1oo2D”架构在要求时的平均失效概率如下:
与“1oo1”架构相似,在计算PFH 时,假设在高要求或连续模式下,当诊断模块检测出任一危险故障时,立即驱使EUC进入安全状态。因此最后失效通道不应包含λDD的成分,因此得出“1oo2D”架构的PFH 为:
“1oo1”架构与“1oo2D”架构在设计上各有利弊,如“1oo1”结构相对简单,开发成本和硬件复杂度较低,但在功能设计上要求比较高,SIL2要求达到不低于90%的诊断覆盖率;“1oo2D”架构引入了诊断模式,且由于异构处理器双通道架构将共因失效概率大大降低,虽然在架构设计上增加了一定的复杂性,但可以获得高安全性[24]。
对于失速告警系统,2台基于单核处理器的失速告警计算机可以构成 “1oo2”结构,但对于单台失速告警计算机来说就是 “1oo1”架构,这个架构虽具有诊断功能,但诊断覆盖率DC是有限的。而基于异构双核处理器的失速告警计算机除本身就是“1oo2D”结构外,在整个系统的构成上也是“1oo2”结构,且DC对比单核要高很多。异构双核处理器因其有两个架构或特性不一样的内核,所带来的非相似性可以避免基于单核处理器所构成的失速告警系统自身“1oo2”结构产生的共因问题。
对于异构双核处理器操纵振杆器的方式,其控制电路如图8所示。
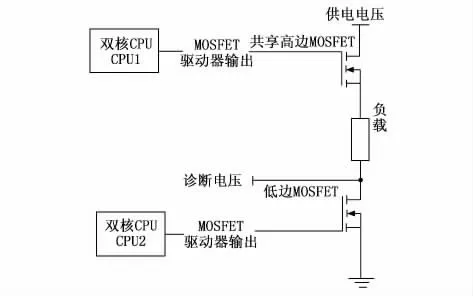
图8 异构双核处理器下振杆器硬件控制电路
如图8所示,高边MOSFET 与低边MOSFET 分别由异构处理器的两个核控制作为一种安全机制。
4.1.3 安全性分析结果的对比
基于上述对单核处理器的失速告警系统和异构双核处理器的失速告警系统的安全性分析,通过前面所列公式可以得出:将所要求的平均失效概率PFDavg作比较,“1oo2D”结构的PFDavg远小于 “1oo1”结构。并且在抖杆器控制电路一样的情况下,异构双核处理器分别控制高边MOSFET 与低边MOSFET,使得有更低的概率导致误操作,安全机制更为可靠。
从以上定性分析可以看出,异构双核处理器相比于单核处理器有更高的安全性和可靠性,并且 “1oo2D”结构可以进行更加完整的故障诊断,从另一维度提升了系统的性能。
5 结束语
本文从处理器、IEC 61508和ARP 4761标准的介绍和发展为背景,先是对两个标准进行了简单介绍,随后简要描述了从单核处理器到多核处理器的发展。从处理器入手,在设计时充分考虑失速告警计算机功能设计需求及安全性、可靠性等多方面要求,选择采用异构双核处理器对失速告警计算机的任务进行合理分配,并应用双核处理器特有的核间共享内存通信机制进行数据的交互,还同时增加了在同一处理器上对解算结果监控和数据一致性判断这一功能。通过IEC 61508标准中对于不同冗余架构的安全性进行分析,确认采用异构双核处理器进行失速告警计算机的设计有助于产品安全性能的提升,并且满足整个系统对于安全性的设计要求,该安全性研究方法可为今后其他对安全性能要求较高的设计提供了参照和依据。
猜你喜欢
房地产导刊(2022年1期)2022-02-28
北京航空航天大学学报(2021年6期)2021-07-20
合成化学(2015年2期)2016-01-17
首都医科大学学报(2015年4期)2015-12-16
科技传播(2014年4期)2014-12-02
无机化学学报(2014年12期)2014-02-28
无机化学学报(2014年7期)2014-02-28
无机化学学报(2014年5期)2014-02-28
无机化学学报(2014年1期)2014-02-28
无机化学学报(2014年1期)2014-02-28