基于柔性超声传感器的骨质状况检测系统
2023-07-06 12:41王博智牛麒铭赵云楠刘卫国林大斌
计算机测量与控制 2023年6期
王博智,牛麒铭,赵云楠,王 伟,刘卫国,林大斌
(西安工业大学 光电工程学院,西安 710021)
0 引言
随着国防科技和外空探索领域的不断发展,外太空失重和高压低氧环境对宇航员身体的影响引起广泛关注,骨质状况的定期检测已成为宇航员在太空中所面临的主要问题[1]。人体骨骼在正常环境下,骨形成与骨吸收会处于动态平衡,当处于太空微重力环境中时,骨骼会为了适应环境变化而发生一系列改变,如骨吸收的增加[2]和骨形成的减少,进而引发骨质丢失和骨脆性增加[3],增高骨折罹患率[4-8]。Grigoriev等[9]研究发现身体部位越低,骨丢失越严重。宇航员在太空中的骨质流失情况已经越来越被重视,各个国家提出各种对策来减小骨质流失对宇航员的影响,太空的微重力环境仍然会导致宇航员骨丢失、骨力学特性减弱和骨基质分解加强[3]。因此,定期对骨质进行检测是宇航员保持健康的必要手段。然而,目前大多数可用的检测系统体积较大、刚性(应变量小于5%)和检测部位单一,不便于宇航员在太空中使用。
可穿戴式柔性传感器因其兼具生物相容性和可拉伸性,逐渐成为研究热点[10-12]。柔性传感器以信号传导的形式将生理信号转化为可视的电信号,在人体健康检测、生物医学和柔性电子皮肤等方面有着巨大的潜力[13]。香港城市大学的杨征保教授采用PZT 剪纸结构和柔性材料PDMS制备了预防关节紊乱的柔性压电剪纸型传感器,用来检测关节的活动情况[14]。清华大学的冯雪教授团队用柔性印刷电路技术生产超薄、柔性印刷电路,使用回流焊接技术将超声波传感器以梅花形焊接到预制电路上,将预制电路放置在模具内,并用柔性基座硅酮作为封装,制备出了柔性超声传能器件和用于监测血流速度的柔性多普勒超声装置[15]。
基于此,本文提出一款基于轴向透射技术[16]的超声骨质测量系统设计,该系统立足于定量超声理论,以FPGA(field programmable gate array)为核心,用高速数模转换(A/D)芯片进行模数转换,电路高度集成,从采样率(50 MHz)、效率功耗、集成度和数据传输速率(115 200bps)等方面改善系统的性能。并且将传感器部分改为柔性基底,设计出一种高灵敏度柔性超声(HSFU,high sensitivity flexible ultrasound)传感器,该传感器可以覆盖不同人体部位并测得该部位的骨质情况。系统通过WIFI(wireless fidelity)模块技术与移动端进行交互,并在移动端设计了一个功能完善、界面简单、操作方便的可视化人机界面,方便使用者的查看与操作,从而达到便携易检测的目的。与传统检测设备相比,该系统缩小了设备体积,摆脱了检测部位单一的缺点,提高了系统的响应速度。
1 骨质状况检测系统设计
1.1 总体系统设计
整个系统由6个模块构成:FPGA 主控模块、脉冲激励模块、超声阵列模块、信号放大模块、数模转换模块和无线传输模块,系统结构如图1所示。

图1 骨质状况检测系统设计
主控芯片(FPGA)控制脉冲激励模块产生80 V、2 MHz的脉冲信号,超声发射换能器发出超声,经过骨骼和软组织传播后被超声接收阵列所接收,声能转换为电信号。接收到的超声信号经AD8331 放大,接着模数转换器3PA1030将模拟信号转为数字信号,获取的数据经SRAM缓存,最终进入FPGA 进行处理与分析。骨质状况信息通过WIFI模块ESP8266传输到移动端显示出来。系统中除超声阵列模块外,其余五个模块均集成在柔性PCB上。
柔性电路可以设计成复杂的三维结构,弯曲成各种形状,可以用于高度重复性的应用。在不同的变形状态下,柔性电路仍旧可以完成相应的电气功能,能够完整地发射脉冲信号以及完成数模信号的转换。通过外壳设计,使系统可以固定在身体的各个部位。外壳采用黑尼龙材料,通过3D打印制备。
1.2 超声特征参量测量
系统采用轴向透射检测原理,将三组单发双收式超声换能器作为前端信号采集器。每组换能器由A、B、C 三块超声换能器组成,位于同一水平线上,其中A 换能器用于发射超声波,B、C两块换能器用于接收超声波,内部隔声层将A 换能器与B、C换能器分隔开,如图2所示。

图2 超声传输路径与时间
发射换能器工作时,超声波以临界角的方向入射到骨组织内,产生侧波。侧波沿骨骼内表面传输一段距离后以相等的角度折射出骨骼,由接收端换能器接收并通过FPGA处理后获取骨质相关信息。
FPGA 内部计数器会记录发射器与各接收器之间的超声传输时间。超声由A 换能器发出,由B 换能器接收的传输时间记为TAB;超声由A 换能器发出,由C 换能器接收的传输时间记为TAC。由图2可知:
由于A、B、C所在平面与骨骼表面平行,则声波射出时,经过软组织的时间和距离相等,即t3=t5,SBB1=SCC1,则:
由式(3)可知,当A、B、C 所在平面与骨骼表面平行时,只需知道超声波从换能器A 分别到达换能器B、C的传输时间,即可求出骨骼中的超声声速SOS。
T-Score和Z-Score目前已成为骨质疏松症的诊断标准。T-Score表示测试者的骨质量与同性别青年人群的骨质量相比较而得出的结果。其具体计算公式如下:
式中,SOS为受试者特定骨骼部位的超声声速,为超声声速参考标准值,SD为标准偏差。
2 系统硬件设计
2.1 FPGA主控模块
本系统的主控模块芯片选用Xilinx公司的Artix7系列,其具体型号为xc7a35tfgg484-2,用户可用IO 口为250个,可以满足大多数设计需求。该芯片的I/O 驱动电压宽泛,从1.2V 到3.3V 都支持,并且支持DDR3的800Mb/s高速输入输出。采用JTAG-10规格接口下载调试程序,将JLink的TDI、TMS、TDO、TCK 四个引脚与FPGA 相连,VCC引脚接3.3V 电压便可用于程序的调试与下载;芯片外置复位电路,提高系统电路的稳定性与可靠性;系统采用N25Q128芯片作为外部FLASH 代码存储器,其具有与磁存储器一样无需电能也可以保持数据的优势,与EPROM(电可编程只读存储器)的紫外线擦除方式相比,FLASH的电擦除功能可以为开发者节省大量时间,也为开发者更新存储器提供了便利条件;外部有源晶振信号质量好,比较稳定,连接简单,为系统提供50MHz时钟频率。主控模块部分电路如图3所示。
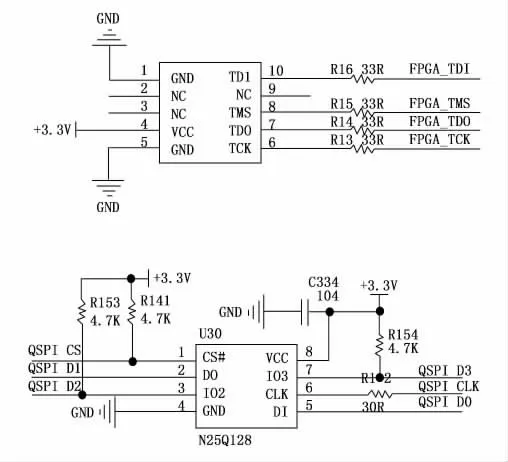
图3 FPGA 主控模块部分电路图
2.2 脉冲激励模块
脉冲激励电路是在脉冲信号的控制下产生一个持续时间很短的脉冲电压,激励换能器产生超声波,用来获得骨质情况。本电路采用的VMOS 管为IRFP450,其参数为VDSS=500 V,RDS(on)=0.4 Ω,ID=14 A。电 路 中 三 极 管8050和8550构成一级驱动电路。一般的中功率VMOS管会有nF级的栅电容,开关电压为7~10V,最大上升时间为几十纳秒。
模块以VMOS 为开关元件,采用脉冲输入方式,靠电感储能形成触发脉冲,不需要较高直流供电,其储能仅与换路时的电感电流的平方成正比。当触发脉冲在负脉冲期间,L1、C1、R2 和R3 组成谐振电路快速放电,形成尖端激励脉冲。电路中,电阻R2用来调节脉冲的幅值大小,当增加R2的阻值时,脉冲的幅值会变大。脉冲激励块如图4所示。

图4 脉冲激励模块电路图
2.3 信号放大模块
超声信号经过软组织和骨质传播后被接收换能器接收,由超声信号转为电信号,再由接收电路进行处理。虽然脉冲激励电路产生的初始声能强度足够大,但是由于超声在传输过程中发生散射和衰减,到达接收换能器时会有相当多的能量损失,导致电压信号较低,所以在接收电路里面需要对超声信号进行放大。为了能够得到较为准确的测量结果,系统采用以AD8331为核心的可变增益放大模块对回波信号进行放大。
AD8331是一款单通道、噪声超低的增益线性可调的放大器,输入频率高达120 MHz,仅需5V 单电压供电。前置放大器单端输入,差分输出,增益为19dB。可编程后置放大器所提供的增益范围在LO 增益模式下由-4.5dB 至+43.5dB,在HI增益模式下由7.5dB至55.5dB。MODE引脚接地,所以模块的增益控制斜率为正。RCLMP引脚通过7.5K 电阻接地,HILO 引脚由FPGA 控制,当HILO=LO 时,输出的峰峰值将被限制到2V。系统AD8331的外围电路如图5所示。

图5 AD8331外围电路
2.4 数模转换模块
A/D转换部分负责完成信号的模数转换工作,以便微处理器进行复杂的信号处理。本系统选用的采集芯片是一款单电压芯片3PA1030,转换速度为50 Msps,可在2.7~5.5V 范围内工作,非常适合高速应用中的低功耗操作。3PA1030 芯片的输入模拟电压转换范围是0~2V,所以电压输入端需要先经过电压衰减电路,使输入的-5~+5V之间的电压衰减到0~2V 之间,然后经过3PA1030芯片将模拟电压信号转换成数字信号。数模转换模块电路图如图6所示。
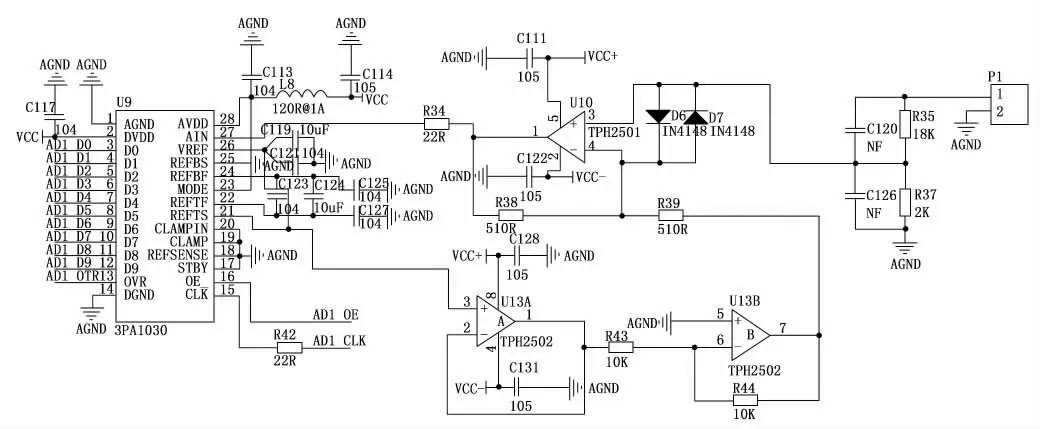
图6 数模转换模块电路图
2.5 无线发射模块
本系统的无线发射模块采用ESP8266,该模块内部集成MCU,通过串口与微处理器进行数据通信。模块的TXD引脚为数据发送脚,与FPGA 的UART 数据接收脚连接在一起。模块的RXD引脚为数据接收脚,与FPGA 的UART数据发送脚连接在一起。VCC 一般选用5 V 供电,选用3.3V 会由于供电不足引起不断复位。ESP8266 有三种模式,本系统采用AP 模式,工作状态时ESP8266产生一个热点,上位机通过连接ESP8266配置好的IP和端口,从而接收WIFI 发过来的信息。FPGA 的UART 输出端与ESP8266的输入端连接,控制WIFI信息发送,波特率选用115 200bps。ESP8266与FPGA 的连接如图7所示。
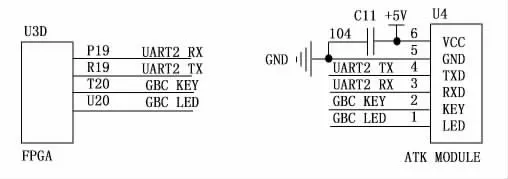
图7 ESP8266与FPGA 连接图
2.6 超声阵列模块
超声传感器贴合在皮肤表面,检测该部位骨质情况,帮助预防上肢骨质疏松。超声发射换能器接收激励电路发射脉冲后发出超声信号,超声信号沿骨头内表皮传播后分别折射进入两个超声接收换能器,接收换能器由于压电效应将声信号转换为电信号。电信号通过FPGA 不间断传输到智能设备进行数据分析和存储。每个超声换能器由PZT压电材料和电极构成,其电信号通过导线进行传输。传感器由三组超声阵列构成,每组与平面的角度不同,分别为17°、20°和23°。三组超声阵列都封装在柔软的PDMS 中,这使得超声传感器柔软、适应性强,能够贴合大多数人体部位。
超声阵列的制备过程需要两个主要步骤,首先制备复合压电材料,然后将阵列封装起来。将压电材料固定好,两面喷涂电极材料,喷涂的时候将基底加热到40 ℃,喷嘴35℃,设备频率7 500Hz;喷涂完毕后在80℃的加热器上干燥10min,复合材料制备完成。焊接导线后,将复合材料放入模具,滴管滴下PDMS液体,填满模具。将模具放在55~60 ℃的真空干燥箱固化处理2~4h,超声阵列制备完成。
PZT压电材料选用11mm×11mm×1mm 规格,传感器固化后,共振频率从2 MHz略微偏移至2.11 MHz。该传感器有着较高的能量传递效率,激励峰峰值电压为10V时,响应峰峰值电压为2.36V,传输距离为5mm,采用水为传输介质。也有较低的能量衰减,类似激励条件下,传输距离为2~5mm,响应峰峰值电压为1.28~3.34V。此外,还测量了该传感器的功率传递效率在特定距离下可达35%,(水为传输介质,输入功率为208mW,接收功率为72 mW)接收功率强度为59.5 mW/cm2(接收功率为72mW,接收超声换能器面积为1.21cm2)。装置的能量转移效率如表1所示。

表1 不同传输深度和激励峰值电压对超声能量传输效率的影响
2.7 电源模块
JW5060T 是一款单晶片式降压开关稳压器,可实现快速瞬态响应。在轻负载时,稳压器以低频运行,以保持高效率和低输出纹波。JW5060T 通过电源适配器输入12V 的电压,经过内部电路,最终输出5V 的稳定直流电压,供其他电源芯片、A/D 电路及其他电路使用。通过输出短路保护、热保护、电流失控保护和输入欠压锁定保证了其应用稳定性。JW5060T_6供电电路如图8所示。
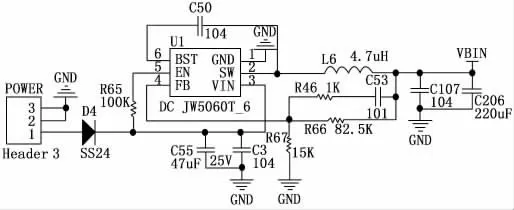
图8 DC JW5060T_6供电电路图
EA3059是四路电源管理芯片,适用于由一节锂电池或一个DC-5V 适配器供电的应用。EA3059的输入电压范围为4.5~6V,在输入5V 电压时,经过内部芯片作用和外部电路,最终输出1.0V、1.5V、1.8V 和3.3V 的电压供系统各模块正常工作。EA3059供电电路如图9所示。

图9 EA3059供电电路图
3 系统软件设计
3.1 系统整体软件设计
系统总体软件设计将各个功能软件部分进行整合。在系统开始运行时,主函数对所有软件部分进行初始化设置。对UART 数据传输部分进行波特率和数据传输位数设置,对WIFI信息交互功能部分进行模式选择、波特率设置、端口号设置和IP地址设置。
上电后,系统确定适合所测部位的阵列组,主控模块控制脉冲激励发射模块发出频率为2MHz,幅值为80V 的超声信号。超声信号接收后根据算法计算出所需结果,最后通过WIFI交互软件部分发送到上位机并显示。系统整体软件设计流程如图10所示。

图10 系统整体软件设计流程图
3.2 超声特征参量测量算法
超声特征参量的测量需要FPGA 来完成,FPGA 主要通过算法设计来对模块进行功能控制。系统启动时,载入与所测人群对应的和SD,FPGA 控制脉冲激励模块给出脉冲信号,超声阵列发射超声波。同时,FPGA 内部两个计时器t1和t2开始计时,当系统检测到接收换能器有信号输入时,所对应的计时器分别停止计时,计算两个计数器的时间差,进而得出SOS。数据有效时,记录数据,数据无效时,重新进行检测。数据量设定为4,四个有效数据测量完成后取平均值并计算骨质参数。超声特征参量测量算法流程如图11所示。

图11 超声特征参量测量算法流程图设计
3.3 WIFI信息交互软件设计
本系统选用ESP8266WIFI模块,该模块可以实现透传,数据接收后将原封不动的发出去,极大提高系统的响应速度。AT 指令在WIFI等嵌入式模块中发挥着重要作用,简化了相关设备联网的复杂度。
FPGA 通过UART 与WIFI模块实现信息通讯,即对WIFI模块发送AT 指令来完成对WIFI模块的设置,依次设置模式为AP 模式,波特率为115 200bps,端口号为1234,IP 地址为192.168.3.122。设置完成后,移动端与WIFI模块发出的热点与端口号配对,完成对WIFI模块的配置,进入到上位机与下位机进行数据传输的状态。上位机通过UDP(user datagram protocol)协议接收到WIFI模块发过来的信号,并通过数据划分将各信息分别显示在相应位置上。WIFI信息交互软件设计流程如图12所示。

图12 WIFI信息交互软件设计流程图
4 实验结果与分析
4.1 系统软件测试
通过信号发生器产生频率为2 MHz的正弦波,并将其接入A/D转换电路。大约两秒后输入第二个通道的信号,可以计算出设定的速度7.5mm/s(两个接收传感器距离为15mm)。FPGA 通过UART 将计算出的结果编码成10位的二进制数据,上位机接收到WIFI模块传过来的信息,通过解码将各个数据显示到相应位置上。在本实验中,将两个通道的信号发生器的时间间隔从2秒逐步设置为5.5秒(步长约为0.7秒),显示结果时,根据无线通信结果同步记录设定速度和测量速度,结果的平均相对误差约为0.3%,说明本系统无线发射模块具有一定的可靠性。
4.2 系统功能测试
本次测试对象为30人,年龄段0~10岁、10~20岁、20~30岁、30~40岁和40~50岁各6人,选用胫骨作为测量部位,每位志愿者测试四次,测试结果取平均值,记为SOStibia,移动端显示最终的检查结果。
将整个系统固定在胫骨处,以水为耦合剂,打开开关,选择发射单元,HSFU 开始工作,测得胫骨处骨质参数数据。打开APP,匹配WIFI模块发出的热点与端口号,APP接收FPGA 发送的信息,显示出来供使用者查看。
本系统在一位受试者胫骨处所测量的胫骨超声参量SOStibia为(3 814.26±0.2)m/s,T-Score为0.2,Z-Score为0.3。当T-Score的值大于-1时为正常,不会存在骨量减少或骨质疏松的情况,APP 显示骨质状况为A;当TScore的值在-1~-2.5之间时,提示骨量减少,但还达不到骨质疏松的程度,APP显示骨质状况为B;在T-Score小于-2.5时可以确定为骨质疏松[17],APP 显示骨质状况为C。本次受试者均为健康人群,因此T-Score的值应大于-1,即APP显示骨质状况应为A。本系统在一位受试者胫骨处所测量的结果如图13所示。

图13 胫骨测量结果显示情况
这与同类产品临床测量结果一致,即胫骨处SOStibia在3 500~4 000m/s之间[18-20]。实验结果与韩国Osteosys公司生产的SONOST-3000的测量结果进行比较如表2所示。

表2 SOStibia测试结果对比表
实验结果表明:两台仪器的SOS检测差别约为0.8%,这与探头材料、系统硬件设计和算法的不同有关。两个系统的检测结果是一致的,即SOS值高的受试者在两个仪器的测试下结果都比较高,因此本系统的检测结果是合理的,进行足够的对比实验测试后,对系统进行合理校准便可提高系统的准确率。
5 结束语
本文展示了一种基于柔性传感器的骨骼状况检测系统,该系统由柔性超声传感器、控制电路和移动端APP 构成,可多部位测量,且高效便携。所开发的柔性超声换能器阵列传感器具有高柔韧性,能量传递效率高达35%,通过外壳设计使其适应人体的多个部位。一旦将HSFU 传感器安装在人体部位上,能在0.2s的时间内测得该部位的骨质情况,并将检测结果通过WIFI发送至移动端。
如前所述,所开发的HSFU 传感器骨骼状况检测系统具有多部位测量、高精度、便携和即时检测等优点,为现阶段在医疗方面发展可穿戴式传感器提供了新的思路。采用便携式柔性传感器检测骨骼状况的策略,将促进柔性传感器在外太空对宇航员骨骼情况检测方面的应用,并对骨质流失监测提供有益的参考数据。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
基层中医药(2021年3期)2021-11-22
中老年保健(2021年12期)2021-08-24
中国生殖健康(2020年8期)2021-01-18
中国生殖健康(2020年5期)2021-01-18
文化创新比较研究(2020年7期)2021-01-13
声学与电子工程(2017年1期)2017-06-22
声学与电子工程(2017年1期)2017-06-22
雷达与对抗(2015年3期)2015-12-09