
基于主动相干光学合成孔径超分辨成像的空间目标探测系统
2023-07-03 06:48邓红艳苏云郑国宪赵明张月田芷铭
光子学报 2023年5期
邓红艳,苏云,郑国宪,赵明,张月,田芷铭
(1 北京空间机电研究所 研发中心,北京 100094)(2 大连海事大学 信息科学技术学院,大连 116026)
0 引言
地球同步轨道(Geosynchronous Earth Orbit, GEO)附近密集运行着大量的通信卫星以及卫星废弃物等,这些目标的本体长宽大约在1.5~3 m、高大约在2~8 m 范围内。采用全球探测模式或近距离探测模式对其进行高分辨全天时成像,可以获取其精细结构、星体姿态以及工作态势等信息。另外,GEO 轨道上还分布着大量的空间碎片,尺寸较大的碎片可能对航天器造成威胁。对其进行精细探测,可为航天器快速规避提供依据[1-2]。目前,天基被动空间目标探测系统主要以美国微卫星技术实验(Micro-satellite Technology Experiment, MiTEx)[3]、天基空间监视(Space Based Space Surveillance, SBSS)[4]、地球同步轨道空间态势感知计划(Geosynchronous Space Situational Awareness Program, GSSAP)[5-7]为代表。传统的被动空间目标探测载荷主要面临以下问题:单口径光学加工研制困难以及运载能力限制;空间分块可展开和被动光学合成孔径成像系统子镜面型控制、共相位调整等难题[8-9];薄膜衍射成像系统色差严重,成像质量差[10];红外载荷夜间高分辨成像能力不足。
GEO 轨道的光照面与阴影面动态范围大,载荷在全球探测过程中存在逆光成像时段,易造成探测漏洞。因此,开展新型高分辨全天时空间目标探测技术研究十分必要。基于主动相干光学合成孔径超分辨成像的空间目标探测系统,采用主动相干光源配合单个小孔径相机,采集目标不同频谱的低分辨图像序列,通过傅里叶叠层频谱拼接算法重构出接近等效合成孔径倍率的超分辨图像[11]。该系统采用激光主动照明,因此不仅具备夜间成像能力,还能满足地影区成像需求,提升空间目标探测能力。总之,该系统可避免传统被动空间目标探测载荷面临的问题,具有一定的优势,是未来实现大口径高分辨成像的技术途径之一。
傅里叶叠层成像技术从显微领域拓展到宏观成像领域后,经历了透射式[11-16]和反射式[17-19]两种模式的发展。2016年,美国莱斯大学的HOLLOWAY J等[12]将傅里叶叠层技术由显微领域拓展到宏观成像领域,使用波长633 nm 的氦氖激光光源,通过相机扫描对1.5 m 处的目标进行透射式成像,实现7.12倍分辨率提升。2017年,该团队[17]使用波长532 nm 的半导体激光光源,通过相机扫描对1 m 处的目标实现反射式成像,实现6倍分辨率提升,同时该团队面向未来天基应用提出基于相机扫描的载荷概念。大连海事大学ZHAO Ming等[13,18]也开展了宏观透射式及反射式傅里叶叠层成像实验研究,采用可见激光光源实现4~6 倍的分辨率提升。西安光机所XIANG Meng[19]提出了激光、成像载荷双星配合的静轨载荷方案,并开展了可见波段宏观反射式成像实验。
目前,傅里叶叠层成像研究多集中在可见波段,频谱扫描方式主要有光源扫描和相机扫描两种方式。本文针对空间目标地影区成像需求以及红外成像分辨率不足问题,开展基于主动相干光学合成孔径超分辨成像的空间目标探测技术研究。提出基于主动相干光学合成孔径超分辨成像的天基空间目标探测系统设计方案和工作流程,并搭建宏观反射式地面验证系统开展超分辨成像实验。
1 宏观反射式理论模型
对于天基遥感应用,采用相机扫描方式的宏观反射式主动相干光学合成孔径系统,需要载荷频繁机动、快速调姿并保持高精度定位,能耗极大、对平台控制精度要求高、扫描时间长,不适用于天基空间目标探测场景。考虑到载荷的工程可行性,我们尝试选择光源扫描的方式。
1.1 成像理论模型
基于光源扫描的宏观反射式主动相干光学合成孔径超分辨成像理论模型[12,19]如图1 所示。根据傅里叶光学理论,在相干光照明条件下,物面和像面之间满足关系
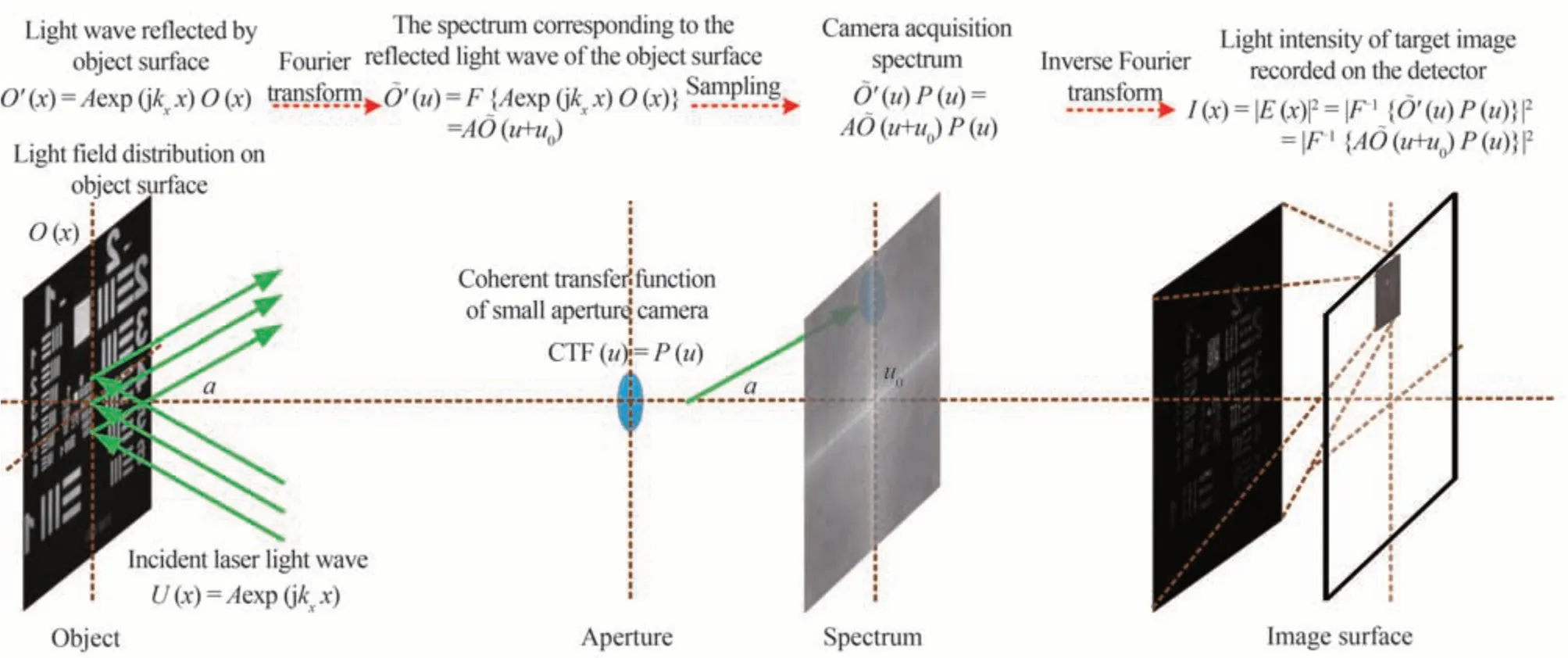
图1 基于光源扫描的宏观反射式主动相干光学合成孔径超分辨成像理论模型Fig.1 The theoretical model of macro-reflection active coherent optical synthetic aperture super-resolution imaging with light scanning
式中,O(x)和E(x)分别为物面和像面的光场分布,x和u分别为空域和频域的坐标,hc(x)和CTF(u)分别为小孔径相机的相干点扩散函数和相干传递函数,两者之间满足CTF(u)=F{hc(x)}。为物体频谱,即衍射受限条件下的相干传递函数等于孔径函数,即CTF(u)=P(u),P(u)为孔径函数。
对于以角度α入射到物面上的平面波,其复振幅分布可以表示为
对式(3)两端进行傅里叶变换,则反射光波的频谱表示为
探测器上记录的目标图像光强可表示为
由式(5)可知,按照一定规律改变光波的入射角度,将会使得物面反射的光波频谱发生相应的位移,经小孔径相机采集后实现对物面不同频谱区域的扫描。
1.2 超分重构算法
本文采用参考文献[14]中所述的改进型叠层迭代算法(extended Ptychographical Iterative Engine, ePIE)来实现宏观反射式主动相干光学合成孔径的超分辨图像重构。其基本思想是在空域和频域中交替迭代来重构物体高分辨率的复振幅信息。重构过程主要利用采集的低分辨图像在空间域替换振幅保留相位,并在物体的频域中替换对应频谱信息,全部位置替换更新后,完成一次迭代过程。当到达预设迭代次数或者设定阈值时完成迭代,获取物体的超分辨重构图像。需要注意的是,这种傅里叶叠层约束频谱拼接算法要求小孔径相机采集到的相邻两帧低分辨率图像经傅里叶变换得到的频谱要满足一定的重叠率,迭代过程才能收敛。
2 天基空间目标探测系统设计方案
2.1 总体思路
根据基于光源扫描的宏观反射式成像理论模型,结合主动相干光学合成孔径超分辨成像的技术特点,本文提出“大视场搜索成像牵引+小幅宽主动相干光学合成孔径超分辨成像”的天基空间目标探测总体思路。由卫星平台搭载的大视场搜索成像系统提供目标的定位信息,小幅宽主动相干光学合成孔径超分辨成像系统通过卫星平台转向机构的引导对目标进行捕获瞄准,然后进行超分辨成像。
2.2 系统组成
小幅宽主动相干光学合成孔径超分辨成像系统是本文提出的新型天基空间目标探测系统的核心。如图2 所示,其主要包括主动相干光产生单元、光学成像单元和图像超分辨重构单元。

图2 主动相干光学合成孔径超分辨成像系统组成图Fig.2 Sketch of active coherent optical synthetic aperture super-resolution imaging system
2.2.1 主动相干光产生单元
主动相干光产生单元由激光器和光学相控阵构成。激光器提供的近红外主动照明光源具有比LED 光源更好的相干性[20-21],在高轨无大气干扰的环境下,相位更易于保持,这对于采用傅里叶叠层相位恢复的超分成像来说是更加有利的。光学相控阵主要由光纤阵列、多模干涉分束器、移相器、光栅衍射阵列输出端、驱动控制器以及系统位置反馈校正器组成。激光光束经光纤阵列耦合进光波导后,由多模干涉分束器分束,驱动控制器驱动移相器在光波导阵元间产生相位差,由光栅衍射阵列调整后实现相干叠加,衍射主极大以某个角度输出,指向空间目标。同时,由系统位置反馈校正器根据卫星平台的运动速度对光束扫描进行实时校正。如图3 所示,光学相控阵输出的每路光束均指向空间目标,并均匀覆盖整个成像视场。按照预先设定的扫描路径,通过计算机程序控制实现每路光束的依次输出,完成频域扫描,采集N×N帧低分辨率图像。

图3 主动相干光产生单元工作原理Fig.3 Module for generating active coherent light
2.2.2 光学成像单元
光学成像单元由光学装置和面阵探测器构成。光学装置主要由偏振片、窄带滤光片和成像镜头组成。当具有高度相干性的激光光束照射到空间目标的粗糙表面时,相干反射光场的波前相位被随机调制,经偏振片、窄带滤光片后滤除工作谱段外的背景杂光,由成像镜头接收后在面阵探测器上形成一帧带有无规则分布散斑图样的低分辨初始图像[22]。
2.2.3 图像超分辨重构单元
图像超分辨重构单元主要由软硬件两部分构成。主要用于实现初始图像的降噪、位置校准等预处理,并通过傅里叶叠层约束频谱拼接算法进行超分辨重构,获取等效合成孔径分辨率的图像。此外,系统还包括供电装置、运动控制装置以及散热装置。供电装置主要用于为主动相干光产生单元、光学成像单元、运动控制装置以及散热装置提供工作电源。运动控制装置主要用于实现对空间目标的瞄准、跟踪。散热装置主要用于高功率激光器的高效散热。
总之,主动相干光学合成孔径超分辨成像天基空间目标探测系统,通过光学相控阵实现各路光束的扫描,小孔径的光学成像单元采集相应频谱的低分辨图像序列,图像超分辨重构单元通过傅里叶叠层频谱拼接算法重构出空间目标的超分辨图像。
2.3 系统设计
2.3.1 总体方案
以主动相干光学合成孔径超分辨天基空间目标探测系统在GEO±150 km 轨道对位于GEO 轨道的目标进行探测为例。若精细观察需要0.1 m 分辨率,幅宽510 m,则可采用0.5 m@150 km 分辨率的成像系统,通过5 倍超分实现0.1 m@150 km。
2.3.2 详细设计
1)探测器选型
对于空间目标探测应用场景,光源选择具有隐蔽性、人眼安全的914 nm 单模近红外激光。考虑到短波红外探测器规模小,需要多块拼接才能实现大面阵,同时探测器又需对914 nm 波长有响应,因此最终选取对914 nm 波长光电转换量子效率较高的红外增强型大面阵硅基探测器。探测器像元尺寸为5.5 μm,探测器规模
式中,W为幅宽,W=510 m,GSD=0.5 m。计算可得Nx=Ny=1 020,因此探测器规模需不小于1 000×1 000。
2)光学系统设计
根据遥感系统设计要求
式中,像元尺寸p=5.5 μm,激光波长λ=914 nm,计算可得F=6.3。
设系统的口径直径D=1 m,则由
得系统焦距f=6.3 m。
光学系统在相干成像下系统的截止频率为
像面极限分辨率为
计算可得l=11.5 μm,在选取探测器时,探测器的像元尺寸需比像面极限分辨率小才能满足成像需求。因此,选定的像元尺寸5.5 μm 探测器满足需求。
另外,相机视场为
式中,成像距离Z=150 km,计算可得相机视场FOV ≈0.2°。
由于焦距较长、视场较小,因此光学系统采用RC 结构形式,可以在一定程度上缩短系统的长度,使系统更加紧凑。
3)光源设计
在空间目标探测应用场景下,采用光源扫描方式来实现等效合成孔径频谱区域的采集时,光学相控阵光源可以采用以下两种设计。
①类似于LED 阵列的光学相控阵光源阵列[20]
光学相控阵光源阵列大小等于等效口径大小,每个位置的光源指向都沿阵列面的法线方向。若系统的口径直径为D=1 m,实现5 倍超分,则光源阵列大小DOPA为
式中,等效口径直径De=5D,光源阵列尺寸较大。
②光源位置不变,只改变角度的单个光源
单个光源的照射范围需覆盖相机单帧图像对应的视场以及等效合成孔径对应的范围。如图4 所示,激光光束直径Dl为

图4 激光光束发散角Fig.4 The divergent angle of the laser beam
激光光束发散角θT为
计算可得θT≈0.3°。
4)光源功率估算
通过控制采集到的低分辨图像的信噪比,来估算激光光源所需功率。
图像信噪比为
式中,Nsignal为信号电子数,Nnoise为噪声电子数,P为单个像元接收到的激光功率,ηdetector为探测器量子效率,ηdetector=0.8,tint为单帧图像积分时间,约取tint=0.1 s,h为普朗克常量,h=6.63×10−34Js,c为光速c=3×108m/s,Ndark为暗电流噪声电子数,约取Ndark=100tint,Nreadout为读出噪声电子数,约取Nreadout=50,Ncir为电路噪声电子数,约取Ncir=6。
令整个像面接收到的激光功率为Pr,则
式中,M为有效接收像元数M=Nx×Ny。
待求的激光器发射功率
式中,激光光束发射角θT=FOV,目标反射率ρ=0.8,目标表面法线与相机光轴的夹角θtarget=0;AR为相机孔径面积。
激光器发射效率ηT=0.9,光学系统效率ηR=0.8,大气透过率ηA=0.9。根据地面实验结果,低分辨图像的信噪比≥15 dB,重构图像信噪比可≥30 dB,满足空间目标探测需求。此时估算激光器发射功率约为150 W。系统设计参数见表1。由此可见,未来主动相干光学合成孔径超分辨天基空间目标探测系统的应用需要大功率激光器技术的支撑。

表1 系统设计参数Table 1 System design parameters
5)滤光片设计
地影区成像对于采用主动光源照明的成像方式来说是有利的。而相反地,白天太阳光、大气、云等背景光会随反射回波信号一起进入系统形成背景干扰。太阳光为宽波段光源,其在主动激光光源对应的窄谱段内能量相对较低,因此可以通过在系统中添加窄带滤光片对其进行滤除。另外,激光光源和太阳光等背景光源互不相干,当成像系统处于主动成像模式时(即激光器与背景光同时工作),采集的场景图像为背景图像和主动相干图像的叠加。若将激光光源关闭,在被动成像模式下所获取的场景图像仅为背景图像。因此,将主动相干图像减去被动成像图像,即可去除背景图像的干扰。在实际应用场景中,拍摄的主被动图像之间会存在一定的时间差,且由于目标、成像系统以及外界环境的变化,也会导致主被动图像之间存在差异,因此需要先进行图像配准,而后进行减除。
3 天基空间目标探测系统工作流程
3.1 工作模式
如图5 所示,主动相干光学合成孔径超分辨成像空间目标探测方法主要采用全球探测和区域探测两种工作模式。全球探测模式是指天基空间目标探测系统运行于GEO 轨道下方,典型值GEO-150 km 轨道,通过顺行位置相对漂移实现对全球GEO 带目标的捕获跟踪、成像探测。区域探测模式是指利用与GEO 轨道的高度差形成的顺行漂移、退行漂移以及升、降轨运动,形成对指定区域的往返探测,实现相应区域内目标的捕获跟踪、成像观测。
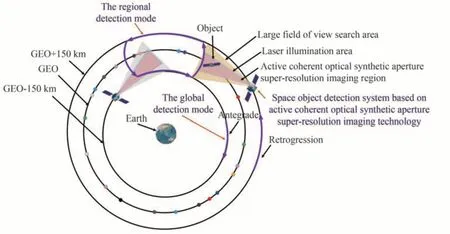
图5 空间目标探测系统工作模式Fig.5 The working mode diagram of the space object detection system
3.2 光束扫描设计
3.2.1 光束扫描角
如图6 所示,光束发散角为θT,通过改变入射角度α,可实现对空间目标的扫描,最大扫描范围等于等效口径De直径的大小。
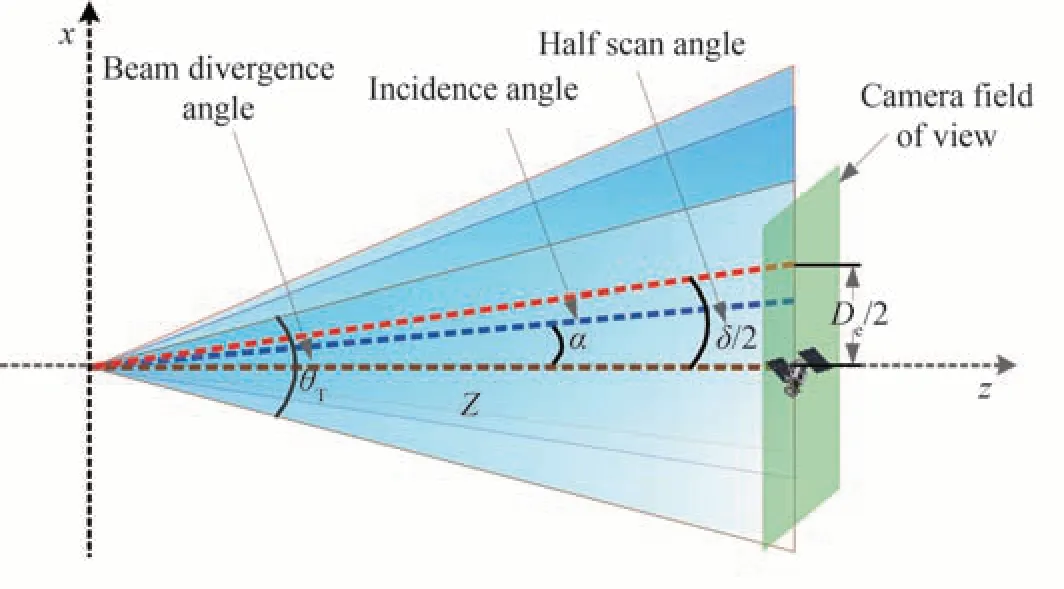
图6 光束半扫描角与等效口径及成像距离的关系,其中红、蓝、棕虚线分别为不同入射光法线Fig.6 The relationship between the half scan angle of the beam and the equivalent aperture, imaging distance.Where the red,blue and brown dotted lines are the central of the beam incident at different angles
3.2.2 子区域近似平行模型
上文给出是基于光源扫描的宏观反射式主动相干光学合成孔径超分辨成像理论模型,是采用平行相干光照射物体后经过傅里叶变换到频域的理论模型。如图7 所示,在实际应用中光源具有一定的发散角。当发散角较小,且成像远距离较远时,可将物面划分为若干个子区域,认为每个子区域内的光束近似平行。在子区域内采用傅里叶叠层频谱拼接算法实现超分辨重构。根据图7 中的几何关系可计算得到照射到第i个子区域的入射波kix以及相应的频谱位移量uix为

图7 子区域近似平行模型Fig.7 The sub-region approximate model
3.2.3 光束扫描校正
主动相干光学合成孔径超分辨成像空间目标探测系统与目标在不同轨道高度运行,两者会产生一定的速度差。为保证相干光束对目标的匀速扫描,如图8(a),需要通过系统位置反馈校正器对光束扫描进行实时校正[23-24]。各路光束的实际扫描速度Vas与匀速扫描速度Vus以及轨道相对运动速度Vrm之间的关系为

图8 光束扫描校正Fig.8 The beam scanning correction
当采用全球探测模式时,天基空间目标探测系统处于GEO-150 km 轨道,相对于目标星为顺行漂移,指向深空背景,可获得目标星携带的主要有效载荷的精细图像。此阶段天基空间目标探测系统相对于GEO轨道目标的相对运动速度VGEO−150km的大小约为3.62 m/s,运动速度稍快于目标星。如图8(b)所示,为保证频谱匀速扫描,在顺行漂移阶段,同向扫描时光束的实际扫描速度Vant为
在反向扫描时光束的实际扫描速度Vantr为
当采用区域探测模式时,顺行漂移阶段光束实际扫描速度计算同上。退行漂移阶段天基空间目标探测系统处于GEO+150 km 轨道,指向地球背景,此时可观测目标侧上方形态。但地球大气散射的蓝光会形成较强的背景,因此在此阶段需要考虑滤除地球蓝光背景。此阶段天基空间目标探测系统相对于GEO 轨道目标的相对运动速度大小约为−3.61 m/s,运动速度稍慢于目标星。如图8(c)所示,在退行漂移阶段,同向扫描时光束的实际扫描速度Vretrs为
在反向扫描时光束的实际扫描速度Vretrr为
在区域探测模式下的升、降轨过程中,可认为光束的实际扫描速度为
另外,当确定关注目标后,也可机动至GEO 轨道−50~−20 km 的范围内,对目标近距离成像。
3.3 图像采集重构
以选定的在GEO±150 km 轨道上对GEO 轨道空间目标进行探测的应用场景为例。激光器产生的高功率、高相干性的近红外光束,经光纤阵列耦合、多模干涉分束器分束并通过移相器移相后产生某一固定相位差,在光栅衍射阵列中实现相干叠加,光束以某个角度α指向空间目标。在计算机程序控制下,通过调节移相器相位差,改变光束的出射方向。系统位置反馈校正器根据卫星平台的运动速度对光学相控阵输出的光束指向进行实时校正,保证相干光束对空间目标的匀速扫描。
根据主动相干光超分辨成像原理,当相干光束指向角发生变化时,光学成像单元采集到的目标频谱将发生相应的位移。不断改变光束指向角,并以速度Vus按“己”字形对空间目标进行扫描,使得光学成像单元相邻两次采集到的目标频谱重叠率为60%。若采用口径为D的光学成像单元实现5 倍超分,则目标频谱单次移动步长为0.4D对应的频谱宽度。采集帧数N为
计算可得N=11。
按照此步骤采集11×11 帧不同频谱位置的低分辨率图像序列,即可覆盖5 倍超分图像对应的全部频谱。利用图像超分辨重构单元将低分辨率图像序列进行基于频域叠层约束的超分辨重构,即可实现对空间目标的一次5 倍超分成像。在全球探测或区域探测模式下,重复以上步骤,实现对空间目标的持续探测。
4 地面实验验证
4.1 实验设计
本文项目组[13-14,18]已分别采用632.8 nm[13-14]和532 nm[18]激光光源验证了宏观透射式[13-14]及宏观反射式[18]主动相干光学合成孔径超分辨成像技术的可行性,为进一步探索其天基应用的可行性,我们在原有的实验基础上搭建了宏观反射式近红外主动相干光学合成孔径超分辨成像地面实验装置,并开展了地面实验。
如图9 所示,近红外激光器的型号为MIL-H-914-800 mW,波长λ=914 nm,成像距离z=1.04 m。工业镜头焦距f=75 mm,口径直径d=2.34 mm,F数为32,镜头视场H9.8°/V7.3°。镜头前加滤光片和偏振片。德国ximea 高分辨率CMOS 相机探测器的像元尺寸p=5.5 μm,像元规模2 000×2 000。以USAF1951分辨率负片背部喷涂哑光白漆构造漫反射式靶标板,靶面大小71 mm×71 mm。

图9 宏观反射式近红外主动相干光学合成孔径超分辨成像地面实验装置Fig.9 The experiment setup for macroscopic reflective near-infrared active coherent optical synthetic aperture super-resolution imaging
为使激光器光束覆盖成像视场,采用扩束镜将激光光束扩束,光束发散角为θT=4.5°。由于实验验证未采用相控阵光源,而采购的商用光源体积较大,放在平移台后,摆扫角度受限,因此采用了相机扫描的等效方式。按照5 倍超分设计,扫描频谱重叠率设置为83%。等效口径直径de=5d=11.7 mm。
4.2 超分重构能力分析
按照上述实验设计,采用图9 所示的地面实验装置,采集25×25 帧图像构成低分辨率图像序列,图10 给出的是采集的625 张低分辨率序列图像中的一部分图像。将采集的低分辨率序列图像进行降噪和位置校准处理后,再采用傅里叶叠层约束频谱拼接算法进行超分辨重构,获取等效合成孔径分辨率的图像。

图10 部分低分辨率图像Fig.10 Some low resolution images
如图11(a)所示,选取任意3 张实验采集的低分辨率图像进行判读。从放大的局部图可知,实际最小可分辨线宽分别为(−1,4)组(线宽707.1 μm,线对0.707 lp/mm)、(−1,6)组(线宽561.2 μm,线对0.89 lp/mm),(−1,5)组(线宽630.0 μm,线对0.79 lp/mm)。而计算得到的小孔径相机的理论最小可分辨线宽为Wd=,对应图11(a)中靶标上黄框标注的(0,2)组附近(线宽445.45 μm,线对1.12 lp/mm)。实际最小可分辨线宽未达到理论最小可分辨线宽。分析认为,这是激光相干散斑噪声导致的分辨率下降[22]。

图11 低分辨图像及超分重构图像对应的组号及最小可分辨线宽Fig.11 Group number and minimum distinguishable line width corresponding to low resolution images and super-resolution reconstructed images
如图11(b)所示,利用降噪和校准处理过的低分辨率图像序列进行傅里叶叠层超分辨重构,得到的最小可分辨线宽为(2,2)组(线宽111.4 μm,线对4.49 lp/mm)。而设计的5 倍等效合成孔径的理论最小可分辨线宽为Wde=λz/de=81.24 μm,对应于图11(b)中靶标(2,4)组附近(线宽88.39 μm,线对5.66 lp/mm)。由此可见,超分辨重构得到的最小可分辨线宽接近设计的5 倍等效合成孔径的理论最小可分辨线宽。
宏观反射式近红外主动相干光学合成孔径超分辨成像地面实验装置的实际超分倍率Mr为
实际超分倍率Mr与设计的5 倍超分辨倍率接近。
为进一步验证宏观反射式近红外主动相干光学合成孔径超分辨成像地面实验装置的超分能力,我们仍按5 倍超分,扫描频谱重叠率83%设计,只改变成像距离,分别采集z=0.85 m、1.04 m、1.23 m 时的低分辨率图像序列,然后进行超分重构。表2 是对不同成像距离下地面实验装置的超分能力分析。
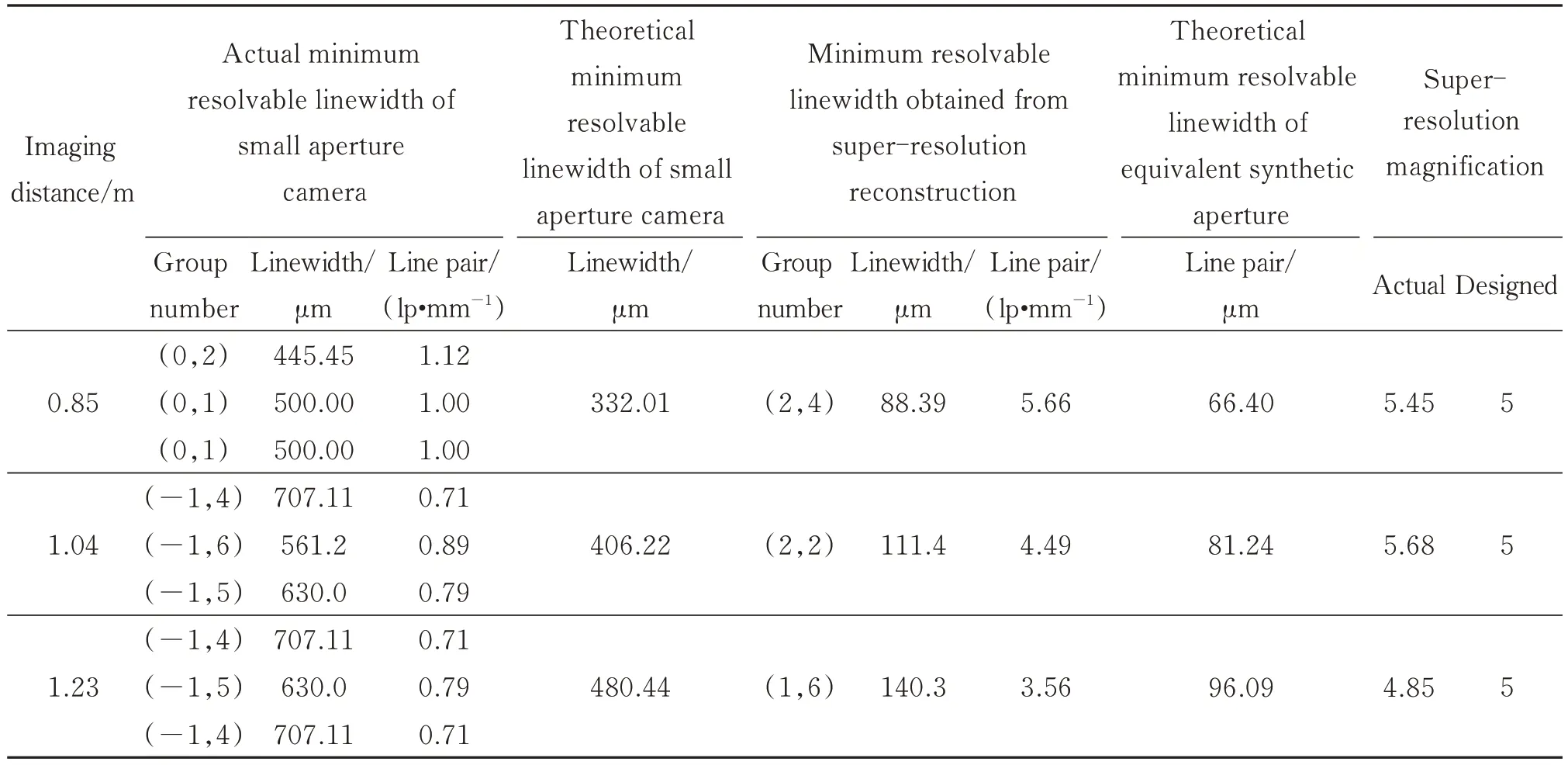
表2 不同成像距离下地面实验装置的超分能力分析Table 2 The super-resolution capability of the experiment setup at different imaging distance
由表2 分析可知,宏观反射式近红外主动相干光学合成孔径超分辨成像地面实验装置的实际超分倍率与设计的超分辨倍率基本一致,新型主动相干光学合成孔径超分辨成像系统相对于传统小孔径相机的成像能力实现了极大的提升。
5 结论
本文基于光源扫描的宏观反射式傅里叶叠层成像理论模型,提出了一种基于主动相干光学合成孔径超分辨成像的空间目标探测系统。系统采用近红外激光主动照明,可满足地影区成像需求,提升空间目标探测能力。该系统采用单个小孔径光学成像单元,实现接近等效合成孔径倍率的超分辨目标图像,可大幅缩减口径需求,有效降低系统研制难度。本文通过搭建的宏观反射式主动相干光学合成孔径超分辨成像地面实验装置验证了系统的超分辨成像能力,为天基应用提供了一种新的解决途径。但在由实验室验证向工程在轨应用推进的过程中还需要突破高功率近红外激光器技术、高精度光束指向控制技术以及红外探测器拼接技术等关键技术。本文提出的基于主动相干光学合成孔径超分辨成像的新型空间目标探测技术也可应用于近地轨道对地高分辨率成像、高轨对地高分辨率成像等领域。
猜你喜欢
锦绣·下旬刊(2021年11期)2021-10-12
潍坊学院学报(2021年2期)2021-07-22
奥秘(2021年3期)2021-04-12
中国电气工程学报(2020年2期)2020-07-28
科技视界(2019年20期)2019-08-29
电脑知识与技术(2019年13期)2019-07-08
物理实验(2017年2期)2017-03-21
光学精密工程(2016年6期)2016-11-07
红领巾·探索(2014年1期)2015-03-16
浙江大学学报(工学版)(2015年1期)2015-03-01
