
基于物联网的物流搬运机器人设计
2023-06-22 14:19:19刘吴钟皓阳胡博雅
无线互联科技 2023年4期
刘吴 钟皓阳 胡博雅

摘要:物料搬运已经进入智能化发展的时代,但是同时搬运多种物料仍存在瓶颈。文章设计的基于物联网的物料搬运机器人,有效解决了搬运物流体系中同时精准地搬运多个物料的问题。机器人包括机械部分、电控部分、云端部分,可实现视觉识别不同的物料并进行物料的搬运,可适应各种环境下的活动,将物料进行分类、整理及上传云端,实现物料的系统管理和搬运。实验表明,通过该方法可以有效识别了物料的正确信息,减少物料不规则形状和相对不确定的摆放位置的干扰,提升了系统稳定性和准确性.
关键词:物料搬运:物联网:机器人:视觉识别
中图分类号:TP393
文献标志码:A
0 引言
目前,我国工厂物料搬运正处于物流业转型升级与高质量发展阶段[1].需进行产品升级或创新更高效的产品来替代原产品。为提高物料运输效率、降低成本,制造业对智能搬运的需求与日俱增[2]。目前,大部分工厂仍使用小型搬运器械进行人工搬运处理和管理,并花费很多时间进行物料状态的实时维护更新,需要投入大量的人力和资源。针对工厂的物料管理与搬运,已不再满足于仅改变物料存放状态和空间位置,急需一种能够自动运输、管理和编辑信息、上传物联网的技术,减少劳动力并降低维护成本。当前物料搬运过程中对物联网智能处理技术的应用比例较小,因此,本文设计了基于物联网的物流搬运机器人,有效实现对物料的搬运、分类和管理。
1 系统总体架构
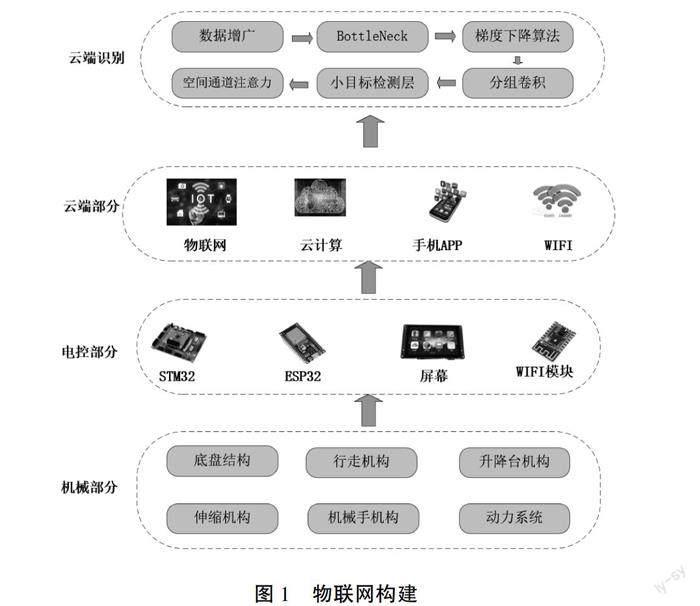
物流搬运机器人系统如图1所示,主要分为机械部分、电控部分、云端3部分。其中,机械部分完成机器人的移动、抓取、放回等功能;电控部分完成对机器人的控制并进行运动的反馈调节,同时将图片数据通过WiFi传输到云端数据处理器:最后通过云端的网络对图片进行处理并输出物料的位置参数,进一步反馈并调整整个系统的运行。
机器人各个部分的详细功能如图2所示,机械部分包括底盘结构、升降台机构、伸缩机构、机械手部分,主要实现对工厂物料的抓取、移动、放下等过程。
电控部分主要由串口屏模块、摄像头模块、WiFi模块、ESP32和STM32主板等组成,实现对机械部分的控制以及对参数的调节。
云端部分主要包括云端对图片的识别、路径规划、WiFi返回物料的位置信息、手机App协同调节参数等。
2 机械部分
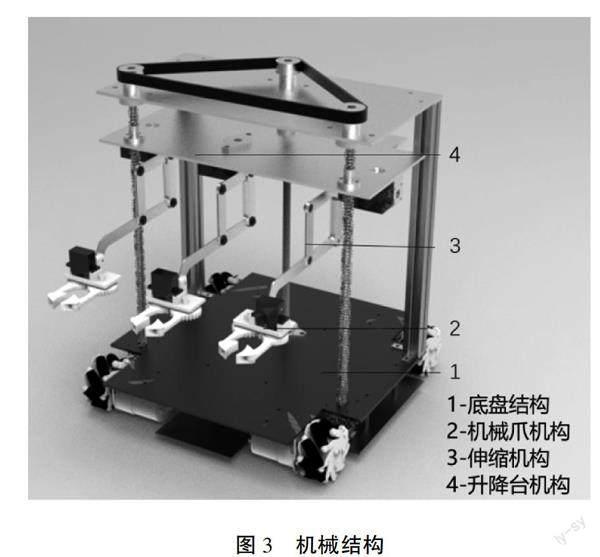
机器人的底盘结构如图3所示,由两块铝板和铜柱连接,4个电机固定在顶板,安装上麦克纳姆轮,完成行走装置、控制装置和整体的固定。利用麦克纳姆轮的受力特性可使机器人通过矢量计算实现转向,同时在两块铝板之间的夹层中进行控制装置的放置。升降台机构可保证活动平台能在丝杠的带动下流畅运动,并确保活动平台在承受足够的重量同时保持平衡,其前端使用了两个步进电机驱动,后方固定了一个丝杠,转矩由顶置的同步带轮转递和平衡。伸缩机构由四杆机构进行伸缩活动,四杆机构由一个舵机进行控制,将最上方的连杆固定在活动板上进行驱动,机械手由另一个舵机驱动,可以合拢为多种形状以贴合多种物料的形状,做到充分接触防止滑脱,事实上机械手的外形完全可以进行不同应用场合的定制。
3 电控部分
小车通过摄像头将图片传送到云端,通过部署在云端的模型对物料进行识别并返回三维坐标,使用STM32芯片计算小车与物料的相对位置,同时判断物料是否在机械臂的抓取范围内,如果在范围外再进行微调,计算各个机械臂伸长距离并张开角度,实现最大范围的抓取,通过升降系统将爪子收回,把物料放置到车内,同时进行合适的路径规划。当前小车是由麦克纳姆轮实现的,后期可以改进成履带,机械臂可以升降到不同高度,准确地抓取物料的中心位置,避免物料掉落。
進一步将ESP32芯片的WIFI模块连接物联网,在Weh服务端进行初始化,避免默认WehServer只能接受一个访问需求。首先进行设备证书的获取,接着获取域名和端口号进行设备的连接,最后可借助云端远程识别机器人上传的图像信息,同时及时反馈相应的物料位置信息并进行相应路径规划。
4 云端部分
云端部分主要是运用云端模型识别图像判定物料的具体位置,将扫描到的物料与自身的信息库进行对比来确认物料信息并发送物料坐标,及时制定相应路径,一般由工厂的管理人员进行更人性化的路径规划,如果没有,搬运机器人会从自身的库中提取合理路径,确保搬运机器人运行轨迹的最优解,同时可结合手机App智能调节搬运机器的参数,比如物料的数字ID等。这样就实现了通过手机App进行物料的搬运,使货物发送更具时效性,同时为实现混合抓取多种不同的物料,可辅助机械臂悬挂相应的存储仓结构。最后将该机器人通过WiFi连接的方式和互联网的云端实现物联网的架构,做到有效地同时运行多台搬运机器人,实现了更有效的物料搬运和管理。
视觉识别物料的原理可概括为利用云端部署的YOLOv5模型,可以自动识别物料在图片中所在的位置[3]。详细原理为:对图片进行预处理,进行数据增广,提高模型泛化能力。使用BottleNeck等结构进一步提高模型的精确度,在此基础上使用梯度下降算法使模型进行收敛,采用分组卷积减少模型运算量,进一步提高模型速度,修改锚框并添加小目标检测层,提高模型小目标检测的效果,引入空间通道注意力机制优化模型算法,加入高质量数据集对模型进行训练学习。得到的更直观的表格数据可实时显示每个物料的各种信息、生产日期、库存时间等,便于管理者进行物料操作和管理。通过库存期查找储存时间过久的物料,然后统计物料的ID,将指令发送至搬运机器人进行选择性的精准搬运,减少物料在库存期间出现意外的情况,同时配合实施云端管理,进行必要的数据检查。
5 结语
本文设计的物流搬运机器人结合物联网的技术,可同时搬运多个相同或不同的物料,解决工厂实际环境中一次只能搬运单个物料的问题。同时可结合物联网进一步规划多个搬运机器人的路径完成在多种应用场景下寻找最优解决方案的功能。在实验中,可以看到具有麦克纳姆轮的物料搬运机器人在狭小的过道内有着显著的优势,在拿取和放置物料的过程中,由于机械臂的活动范围较大而有轻微振动导致放置位置出现误差,但是误差在可接受范围内,如果将物料进行堆叠可能要进行进一步的实验测试。具体实施路径为:在云端对物料进行识别,将输入的图片进行预处理增广,通过YOLOv5的模型在梯度下降算法的前提下对各组分别采用卷积计算,降低卷积深度,进一步减少模型计算量,提升模型识别速度;同时添加小目标检测层,弥补对不常见物体检测的缺陷:最后对物体的颜色、形状进行预判断,调整机器人到合适的位置识别物料上面的数字ID.再反馈到云端数据库进行数据更新,完成通过机器人搬运物料的工作。相对于传统的人工搬运,本文设计的技术可以有效识别正确信息,并减少形状和位置的干扰,同时也能有效提高系统运行速度,减轻硬件端的运行负荷,具有数字化程度高的优势,方便及时寻找异常物料,降低物料搬运工作的错误率。
参考文献
[1]黄婷华.基于物联网的智能物流回收系统研究[J].广东交通职业技术学院学报,2022(2):58-61.
[2]杨宗林.物料搬运移动机器人的优化设计[D].合肥:合肥工业大学.2017.
[3]赵景彩,杨秀芬.基于物联网的自动控制系统的研究[J].中国设备工程,2022( 11):77-79.
(编辑沈强)
猜你喜欢
科技视界(2016年26期)2016-12-17 20:47:02
艺术科技(2016年9期)2016-11-18 16:03:21
中国市场(2016年38期)2016-11-15 00:49:28
中国科技博览(2016年19期)2016-10-19 14:58:22
电脑知识与技术(2016年21期)2016-10-18 22:33:02
今传媒(2016年9期)2016-10-15 23:19:42
环球时报(2016-08-01)2016-08-01 07:04:45
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
