改良单一体位在机器人辅助腹腔镜下肾输尿管及膀胱袖状切除术中的应用效果
2023-06-20 05:42杨芬玲别逢桂周帅黄绿香林威陈文龙李梓豪李冠升黄春景吴展华
机器人外科学 2023年1期
关键词:腹腔镜手术
杨芬玲 别逢桂 周帅 黄绿香 林威 陈文龙 李梓豪 李冠升 黄春景 吴展华
摘 要 目的:探讨改良单一体位在机器人辅助腹腔镜下肾输尿管及膀胱袖状切除术中的应用效果。方法:选取2020年6月—2022年5月于广东省人民医院行达芬奇机器人肾输尿管及膀胱袖状切除术的31例患者作为研究对象,其中2020年6月—2021年9月的21例患者采取传统体位(传统体位组);2021年10月—2022年5月的10例患者采取改良单一体位(改良单一体位组),比较两组患者在手术体位摆放时间、体位摆放前后生命体征变化、医疗器械相关压力性损伤、机械臂故障、手术时间、术中出血量、静脉输液不畅率及医护人员满意度等指标的差异。结果:改良单一体位组患者手术体位摆放时间和手术时间方面显著短于传统体位组(P<0.05),采用单一改良体位的医护满意度高于传统体位(P<0.05),其余指标比较差异无统计学意义(P>0.05)。结论:达芬奇机器人辅助腹腔镜下肾输尿管及膀胱袖状切除术使用改良单一体位可有效缩短手术体位摆放的时间和手术时间,提高手术效率,同时可极大改善手术医护人员的满意度,值得临床推广。
关键词 机器人辅助手术;腹腔镜手术;上尿路尿路上皮癌;肾输尿管切除;膀胱袖状切除;手术体位
中图分类号 R615 R693 文献标识码 A 文章编号 2096-7721(2023)01-0025-09
Abstract Objective: To investigate the efficacy of modified single position in robot-assisted laparoscopic nephroureterectomy and bladder cuff excision for upper tract urothelial cancer (UTUC). Methods: 31 patients with UTUC who underwent robot-assisted nephroureterectomy and bladder cuff excision in Guangdong Provincial Peoples Hospital from June 2020 to May 2022 were selected into this study. Among which, 21 patients received the surgery under traditional position from June 2020 to September 2021 were divided into the traditional position group, and 10 patients under the modified single position from October 2021 to May 2022 were divided into the modified single position group. The positioning time, vital signs before and after positioning, medical device-related pressure injuries, robot arm fault, operative time, intraoperative blood loss, intravenous infusion failure rate and medical staff satisfaction rate of the two groups were compared and analyzed. Results: The positioning time and operative time in the modified single position group were significantly shorter than those in the traditional position group (P<0.05), while there was no significant difference in other indicators (P>0.05). Conclusion: Da Vinci robot-assisted laparoscopic nephroureterectomy and bladder cuff excision for UTUC with the modified single position could effectively shorten the positioning time and operative time, greatly improve the efficiency of operation and the satisfaction of medical staff, which is worthy of clinical application.
Key words Robot-assited surgery; Laparoscopic surgery; Upper tract urothelial cancer; Nephroureterectomy; Bladder cuff excision; Surgical position
上尿路尿路上皮癌(Upper Tract Urothelial Cancer,UTUC)是一種相对罕见的泌尿系肿瘤,约占尿路上皮恶性肿瘤的5%,其标准手术方式包括肾输尿管全长切除术及膀胱袖状切除术[1]。以上手术的难点在于输尿管壁内段的切除和膀胱残端的缝合[2]。第4代达芬奇机器人具有极佳的3D高清视野和10倍光学放大术野,其单一灵活的控制可以减少主刀体力消耗,器械持臂的人手震颤过滤系统可以避免抖动,且其器械操控灵活、精准,这为手术治疗UTUC提供了很好的操作平台,能够更精准地完成肾输尿管及膀胱袖状切除术。
机器人手术体位既要确保患者体位安全、舒适,满足机器人手术的需要,还要考虑机械臂定泊与患者体位之间的关系。合理的体位安置,能够确保手术视野清晰暴露,同时确保患者呼吸、血液循环正常,避免患者外周神经出现压迫,是手术成功的关键[3]。当前机器人辅助腹腔镜下肾输尿管切除及膀胱袖状切除术常规体位管理为:先侧腹75°折刀位常规游离肾脏周围,向下游离输尿管至膀胱开口处,将游离好的肾脏和输尿管放置在腹腔,然后关闭切口;转换体位平卧位后,再重新消毒铺巾,选择一个新的腹部切口将肾脏、输尿管、淋巴结及膀胱袖状切除后关闭切口。这种传统体位既增加了手术时间、体位摆放时间和体位摆放的工作量,也增加了无菌用物的成本。为此,广东省人民医院泌尿外科机器人手术团队改良了Trocar布局和机器人泊位,手术室护理团队根据医生的手术需要设计了改良单一体位,并基于此探究改良单一体位在机器人肾输尿管及膀胱袖状切除术中的应用效果,以期为临床实践提供参考。现报道如下。
1 资料与方法
1.1 研究对象
选取2020年6月—2022年5月于广东省人民医院行达芬奇机器人辅助腹腔镜下肾输尿管及膀胱袖状切除术的31例UTUC患者作为研究对象。纳入标准:①符合上尿路尿路上皮癌的相关症状描述,结合CT影像及病理学检查,确诊为UTUC;②患者需接受机器人手术治疗;③年龄≥18岁;④患者及家属知情同意,自愿参加。排除标准:①合并其他恶性肿瘤者;②合并有严重的心脑肾疾病者;③正参与其他临床研究者;④肿瘤侵犯其他器官者。患者均签署手术知情同意书。本研究经广东省人民医院伦理委员会批准(KY-Q-2022-222-01)。
1.2 体位管理
1.2.1 传统体位组体位摆放方法
传统体位组采取常规体位75°折刀位+平卧位二次体位。全身麻醉完成后,由麻醉医生、手术医生及巡回护士进行麻醉后的安全核查,根据患者的影像学资料确定手术部位,评估患者生命体征平稳后,三方协同将患者置于75°健侧卧位。体位摆放和管理方法:①患者呈平卧人字位,术野区域对准手术床背板与腿板折叠处,置小腰垫于腰下,凹陷的腰区逐渐变平后拉伸腰部肌肉,充分暴露肾区。②错开放置双下肢并屈曲约45°,下侧在前,上侧在后,两腿间垫大软枕,利用约束带固定肢体。③因术中打孔布局的需要,不可在耻骨联合处放置侧挡板;背部骶尾部位应放置侧挡板,以保持患者处于中立位置。④头侧用啫喱头枕垫高,防止颈部过伸。麻醉医生将患者头部抬起后,巡回护士将准备好的啫喱头枕置于患者头部下方,注意将耳廓悬空置入啫喱头枕的中空位。⑤术侧上肢屈曲呈抱球状置于托手板上,远端关节稍低于近端关节,肩部外展不超过90°[4]。⑥体位安置完毕将患者双上下肢妥善固定好,防止滑落和坠床,并将软垫置于患者的膝关节外侧、外踝等骨突处进行保护。手术开始切皮前再次进行三方核查,手术开始后游离肾脏周围并向下游离输尿管至约髂血管处,肾盂肿瘤用可吸收血管夹闭输尿管防止肿瘤细胞溢出,并将充分游离的肾及输尿管置于腹腔内,清点器械及纱布缝针后,缝合并关闭切口。撤除Trocar及机械臂后改二次平卧位,术野再次消毒铺巾,患侧下腹部斜行切口,自腹膜外取出患侧肾脏及输尿管,继续游离患侧输尿管至膀胱开口处,肾脏、输尿管、淋巴结及膀胱袖状切除物自切口取出,缝合膀胱缺口,创面彻底止血,逐层关闭切口。
1.2.2 改良单一体位摆放方法
改良单一体位采取75°折刀位+术中更换Trocar布局。摇床往患侧倾斜45°,头低脚高30°。其中,75°折刀位的摆体位方法及体位管理同对照组。
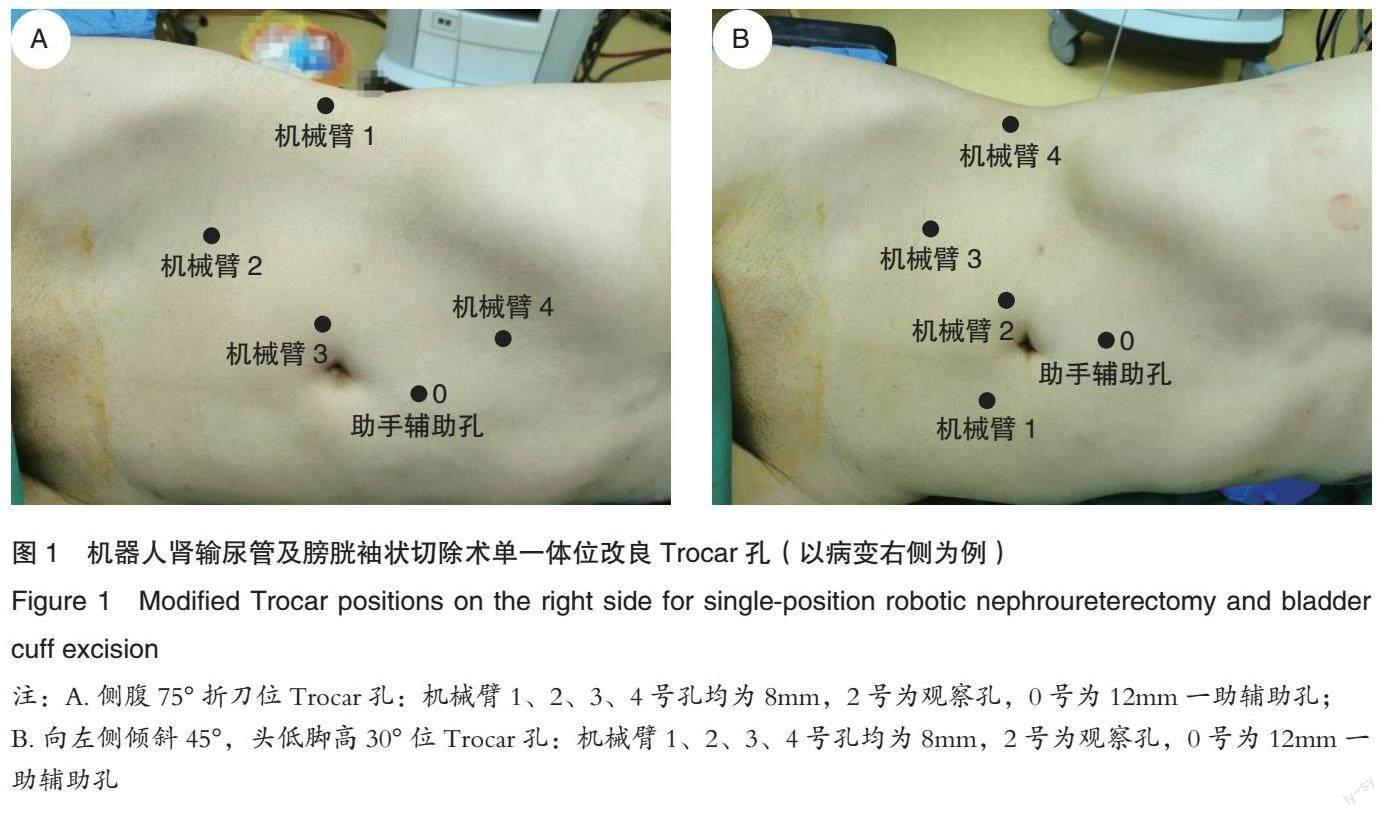
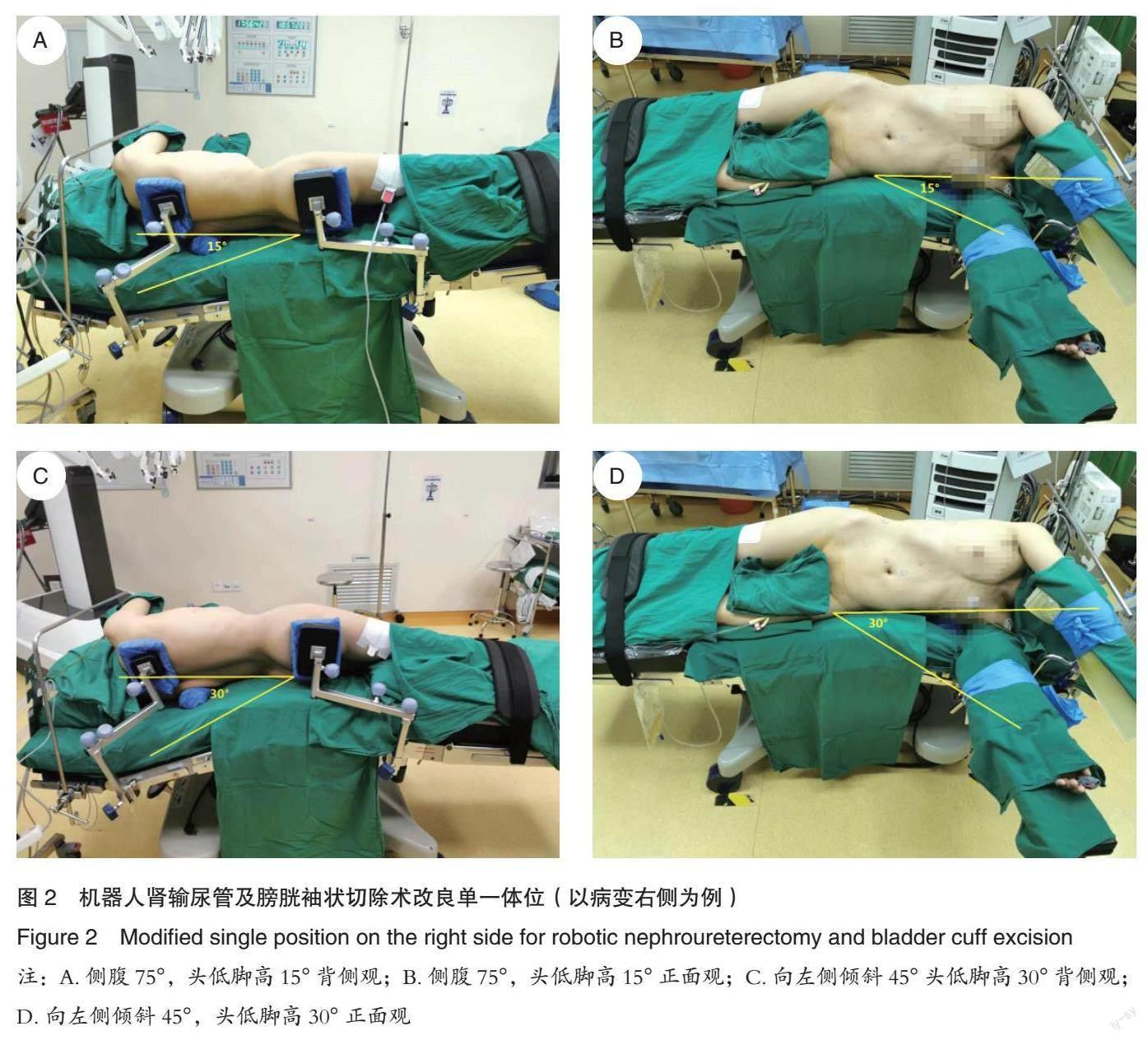
改良单一体位摆放及管理方法如下:手术开始后,患者取75°健侧头低脚高,15°折刀位,手术医生将肾脏、输尿管向下游离至膀胱开口处,将游离好的肾脏和输尿管放置在腹腔,术中不关闭切口,不需要重新消毒铺巾。手术医生在原来Trocar套管布局上关闭一个穿刺孔,将套管布局进行重新改良定位(以病变右侧为例,其Trocar 1号位于腋中线髂嵴上约2cm处,Trocar 2号位于右侧腹直肌外缘1号孔内下8~10cm处,Trocar 3号位于肚脐旁右侧腹直肌中点偏下1~2cm处,Trocar 4号位于右侧腹直肌中点脐上约8~10cm处,辅助孔位于正中线与3、4号孔连线中点垂直线交界点),肝脏较大或下垂时可加一5mm Trocar孔进行举肝(左侧尿路手术无需举肝)。术中一般先建立3号Trocar孔,然后建立气腹并观察腹腔内情况(如图1A)。手术开始后游离肾脏周围并向下游离输尿管至约髂血管处,手术医生关闭1号Trocar孔,然后在肚脐旁左腹直肌中点偏下1~2cm处布局1号Trocar(如图1B)。巡回护士根据医生改良的套管布局进行改良体位的更换。在原来侧腹75°头低脚高,15°折刀位的基础上将手术床往患侧倾斜45°,头低脚高30°(如图2),摇床时妥善固定患者上下肢体,检查患侧挡板是否固定妥善。头低脚高30°时注意用软垫保护患者眼睛并确保头部无受压。改良后的体位机器人手推车不需要进行重新泊位,只需要将机械臂根据手术医生改良后的Trocar布局向患者头侧方向顺时针旋转半圈,即可对新布局的Trocar进行下一步对接。在机器人辅助下继续游离患侧输尿管至膀胱开口处并行膀胱袖状切除,缝合膀胱缺口。扩大机械臂3号Trocar孔,完整取出标本,逐层关闭切口。
1.3 观察指标
观察指标主要包括:①手术体位摆放时长:全身麻醉完成后,从开始摆放体位到体位摆放结束的时间[5];②体位摆放前后生命体征:患者体位摆放前与体位摆放后的收缩压(SBP)、舒張压(SDP)、心率(HR)、呼吸(R)等生命体征变化[3];③手术时间:从安全核查后开始切皮到关闭切口后的时间;④术中出血量:根据吸引瓶里面出血量减去术中冲洗的量加上出血纱布的情况计算出术中的出血量;⑤机器人机械臂相关压力性损伤:根据美国国家压疮咨询委员会2016年压力性损伤分期进行评估并记录[6],术后即观察评估两组患者在摆体位位时易受压的腰部、双侧大腿、上肢、肩胛部、足跟部及颜面部皮肤状况[7],若出现压力损伤即为医疗器械相关压力性损伤[6];⑥发生机械臂故障次数:由巡回护士记录术中发生机械臂故障的次数,无法到达目标区域、发生黄灯报警、机械臂发生碰撞即为机械臂故障[8-9];⑦静脉输液不畅率:体位改变或机械臂压迫上肢而导致的输液不畅;⑧医护人员满意度:采用自行设计的问卷进行医护人员体位管理满意度调查,选项分为:满意、一般、不满意。摆放体位前后的生命体征变化由麻醉医生负责记录,其它观察指标由机器人团队的2名专科护士负责观察并记录。
1.4 统计学方法
所有数据采用统计学软件SPSS 24.0 进行分析,服从正态分布的计量资料采用均数±标准差(x±s)表示,偏态分布的计量资料采用中位数、四分位数描述,计数资料采用率、百分比进行描述;服从正态分布的计量资料组间比较采用t检验,偏态分布的计量资料采用秩和检验,计数资料组间比较采用 χ2检验。检验水准α=0.05。
2 结果
2.1 两组患者一般资料比较
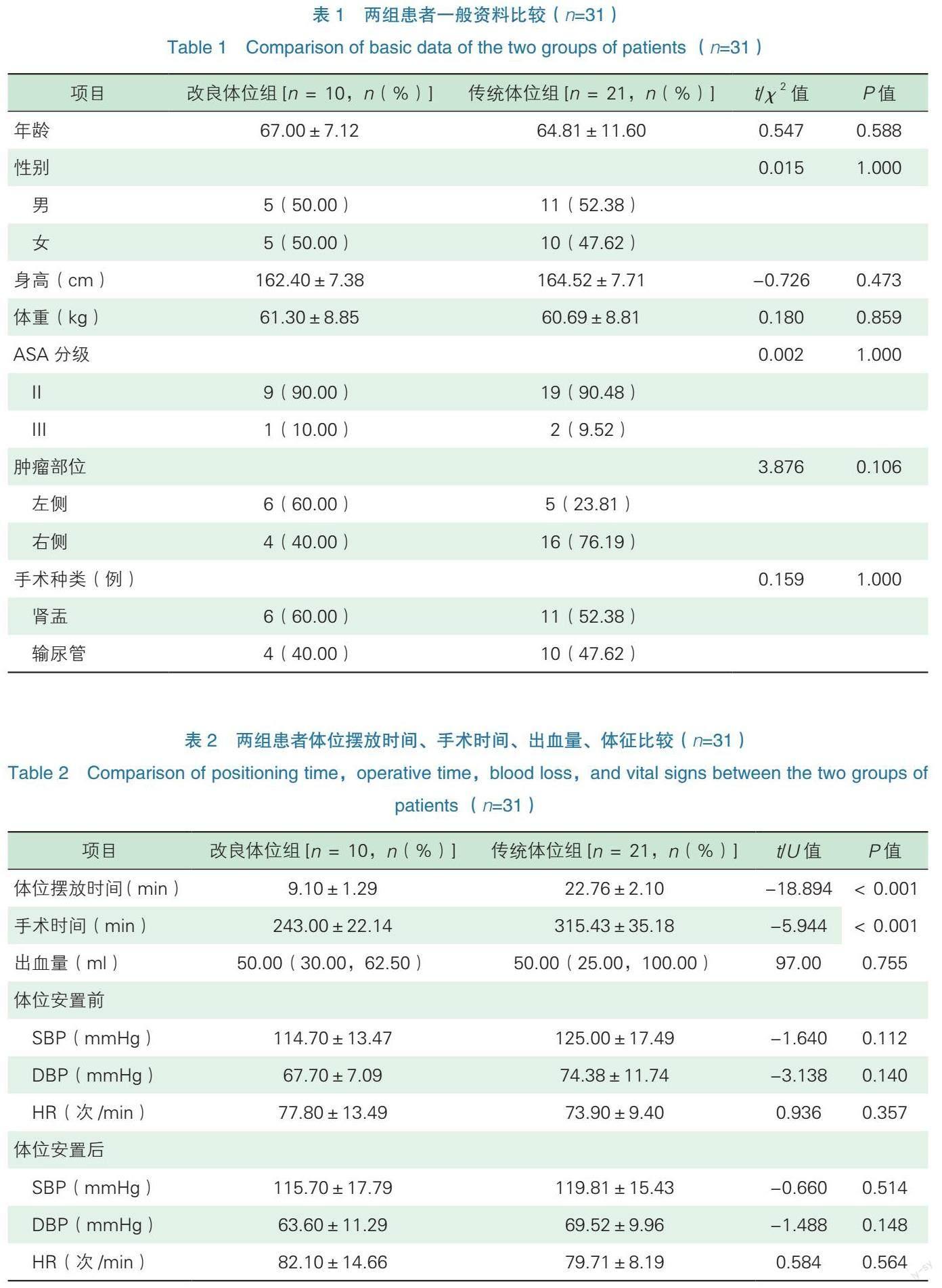
病例共31例,其中传统体位组21例,改良单一体位组10例。所有患者中,男性16例,女性15例;中位年龄68(44~86)岁;肿瘤位于肾盂16例,输尿管15例;左侧11例,右侧20例。两组患者年龄、性别、身高、体重、ASA分级、肿瘤部位、手术种类相比,差异无统计学意义(P>0.05),见表1。
2.2 两组患者体位摆放时间、手术时间、出血量、体征比较
两组患者体位摆放时间、手术时间相比,差异具有统计学意义(P<0.05);两组间其余指标比较,差异均无统计学意义(P>0.05),见表2。
2.3 两组医护人员满意度、机械臂故障状况、输液通路不畅状况比较
两组医护人员满意度比较差异具有统计学意义(P<0.05),其余指标比较差异均无统计学意义(P>0.05),见表3。
3 讨论
近年来,随着科技的发展,机器人技术在泌尿外科手术中的应用越来越广。自2006年Rose k等人[10]报道了首例机器人辅助腹腔镜根治性肾输尿管切除术(Robot-assisted Nephroureterectomy,RANU)以来,该术式也逐渐进入临床应用。机器人辅助肾输尿管全长切除术及膀胱袖状切除术对手术体位摆放要求高,既要确保患者体位安全舒适,满足机器人手术操作的需要,还要深入考虑机械臂定泊与患者体位之间的关系。无论采用何种方式行肾输尿管全长切除术及膀胱袖状切除术,都要进行肾脏和输尿管中上段的完整切除,而且切除的标本一定要保证其连续性和完整性,避免因损伤或中断导致的肿瘤细胞外溢造成肿瘤腹腔种植,影响患者预后。此术式均存在的问题是Trocar及体位设计往往不能兼顾肾区和盆腔的手术操作,操作空间受限;而且在术中均需要改变患者体位,重新消毒铺巾,这不仅会增加体位摆放时间及手术时间,加重医护人员的工作量,也加大了感染风险。国内外有不少研究报道了单一体位的摆放方法,提出了各自的解决方案。Park S Y等人[11]、阮海龙等人[12]及王晨阳等人[13]均报道了单一体位的先进布局经验和技巧,但均未得到较好的论证与推广。肾输尿管膀胱袖状切除术的难点就在于手术切除范围较大,完全单一体位下的一次定位容易在术野远处造成机械臂冲突。基于以上顾虑,本研究中采用全新的打孔方式,更适用于机器人腹腔镜下肾输尿管切除单一体位,手术室机器人团队根据手术医生调整后的打孔方式设计了改良单一体位。在原来侧腹75°头低脚高15°折刀位的基础上将手术床往患侧倾斜45°,头低脚高30°。改良后的体位在进行手术时,机器人手推车不需要进行重新泊位,只需要将机械臂根据主刀医生改良后的Trocar布局往患者头侧方向顺时针旋转半圈,即可重新对接改良后Trocar。
虽然国内已有研究报道显示单一体位具有操作简便、创伤小、术后恢复快、并发症少和疗效确切等优点,由于肾输尿管膀胱袖状切除术的难点就在于手术切除范围比较大,完全单一体位的一次定位在进行机器人手术时容易在术野远处造成机械臂冲突。本中心的改良单一体位与其他单一体位的创新和优势是通过改变Trocar布局与术中体位,使术野更清楚,操作更简单。改良后的二次定位的锚定点位均位于术野的最远侧,可以保证术野充分暴露,减少器械冲突,有助于顺利进行肾脏上极与肾上腺的分离、膀胱残端缝合等操作。
本研究结果显示,与传统体位比较,改良单一体位可显著缩短摆体位时间 [(9.10±1.29)min Vs (22.76±2.10)min]。传统体位包含两次手术体位的变更(即75°折刀位+平卧位),手术体位更换流程比较复杂。此外,在第二次体位变更前需重新归置手术器械和机械臂,这会额外增加体位摆放时间。而本研究通过优化体位管理实行的改良单一体位可一次性满足机器人手术对体位的要求,避免多次搬动患者,使得手术体位安置简单化、流程化,有助于提高手术效率。本研究结果显示,采用改良单一体位的手术时间显著少于传统体位手术,这主要与传统体外下体位摆放时间延长、二次变更体位后需要重新消毒、穿刺等操作流程重复有关。传统体位75°折刀位+平卧位二次体位需将肾及输尿管游离后置于腹腔内,清点器械及纱布缝针后,缝合并关闭切口。撤除Trocar孔及机械臂后改二次平卧位,术野再次消毒铺巾,将肾脏和输尿管及淋巴结及膀胱袖状切除物自切口取出,缝合膀胱缺口,创面彻底止血,逐层关闭切口,这一系列流程必然会增加手术时间。单一改良体位不需要二次体位摆放、术中关闭切口、二次消毒铺巾等操作,也不需要对手推车机械臂进行二次定位,既可保证手术进程顺利进行,又能缩短手术操作时间。
此外,改良单一体位增加了护士的满意度。在手术量越來越多的今天,手术室护士的工作量及工作压力越来越大。高效、顺利地完成每一台手术是医护人员的目标[14]。在手术室这种高压、繁重的工作环境下。改良单一体位减轻了手术室护士的工作量。传统体位需要器械护士变更患者体位前再次清点手术物品,在患者体位变更为平卧位后又需要器械护士额外进行一次铺巾消毒,同时还需要将机械臂进行二次定位对接,大大增加了洗手护士和巡回护士的工作量。而使用改良单一体位时,不需要二次更换体位,减少了关闭切口及消毒铺巾的次数。改良后的体位不需要对机器人手推车重新泊位,只需要将机械臂根据主刀医生改良后的Trocar布局往患者头侧方向顺时针旋转半圈,即可进行下一步对接。改良单一体位有效地减少了洗手护士和巡回护士的工作量,提高了护理人员的满意度。同时,改良单一体位能够充分暴露手术部位,方便医生操作,减少搬动,简化操作流程,缩短体位摆放时间,提高了手术效率,也进一步提高了主刀医生的满意度。
4 总结
达芬奇机器人辅助腹腔镜下肾输尿管及膀胱袖状切除术使用改良单一体位术中无需二次改变患者体位,可缩短患者体位摆放的时间、手术时间,提高手术效率,同时可以提高手术医护人员的满意度,值得临床的推广。本研究的局限性是病例数少、循证医学证据级别有限,后续仍需要进行大样本、多中心前瞻性研究进一步验证该改良体位的优势。
参考文献
[1] Margulis V, Shariat S F, Matin S F, et al. Outcomes of radical nephroureterectomy: a series from the Upper Tract Urothelial Carcinoma Collaboration[J]. Cancer, 2009, 115(6): 1224-1233.
[2] 翁博文, 邱志磊, 孫发林,等. 达芬奇Xi系统在单一体位经腹腔肾输尿管切除术中的应用[J]. 中华腔镜泌尿外科杂志(电子版), 2022, 16(2): 151-155.
[3] 吴延华, 肖蕾, 徐昌霞, 等. 改良体位在达芬奇Xi机器人胃癌手术中的应用效果[J]. 中国临床研究, 2022, 35(3): 436-440.
[4] 别逢桂, 常后婵, 林少敏, 等. 电动充气式胸垫在侧卧位肺手术中的应用研究[J]. 护理研究, 2017, 31(34): 4415-4417.
[5] 孙大鹏, 申兵, 乔芳芳, 等. 机器人辅助腹腔镜下前列腺癌根治性切除术改良仰卧位与常规体位的对照研究[J]. 机器人外科学杂志(中英文), 2022, 3(2): 115-119.
[6] 褚万立, 郝岱峰. 美国国家压疮咨询委员会2016年压力性损伤的定义和分期解读[J]. 中华损伤与修复杂志(电子版), 2018, 13(1): 64-68.
[7] 陆彤, 刘佳, 芮琳. 改良体位预防患者在达芬奇机器人手术中医疗器械相关压力性损伤的效果观察[J]. 护理学报, 2020, 27(1): 70-72.
[8] 申培培, 张琼, 吕雪青, 等. 达芬奇手术机器人术中故障发生原因及改进措施[J]. 护理学杂志, 2017, 32(12): 50-51.
[9] 朱勤春, 韦烨. 机器人手术配合与故障处理[J]. 中国实用外科杂志, 2016, 36(11): 1241-1242.
[10] Rose K, Khan S, Godbole H, et al. Robotic assisted retroperitoneoscopic nephroureterectomy-first experience and the hybrid port technique[J]. Int J Clin Pract, 2006, 60(1): 12-14.
[11] Park S Y, Jeong W, Ham W S, et al. Initial experience of robotic nephroureterectomy: a hybrid-port technique[J]. BJU Int, 2009, 104(11): 1718-1721.
[12] 阮海龙, 程功, 陈志贤, 等. 机器人辅助单一体位经腹入路肾输尿管切除+膀胱袖状切除术治疗UTUC的疗效[J]. 中华泌尿外科杂志, 2021, 42(11): 810-813.
[13] 王晨阳, 刘皓, 韩金利, 等. 单次锚定法经腹机器人辅助肾输尿管切除术的技术特点及疗效[J]. 中华泌尿外科杂志, 2020, 41(2): 85-89.
[14] 李冬雪, 唐佳, 骆玮. 目视管理在手术床体位配件管理中的应用与效果[J]. 护士进修杂志, 2018, 33(4): 336-338.
猜你喜欢
中国实用医药(2016年28期)2016-12-07
中国实用医药(2016年27期)2016-11-30
中国实用医药(2016年27期)2016-11-30
中国实用医药(2016年27期)2016-11-30
中外医疗(2016年29期)2016-11-30
中外医学研究(2016年26期)2016-11-30
中外医学研究(2016年26期)2016-11-30
中国现代医生(2016年25期)2016-11-19
中国实用医药(2016年24期)2016-10-17