
基于K-means算法的光伏路灯蓄电池故障识别研究
2023-06-15 12:09:57侯林涛阎俏张桂青金东毅刘业春张公飞
计算机时代 2023年6期
侯林涛 阎俏 张桂青 金东毅 刘业春 张公飞

摘 要: 针对乡村光伏路灯存在维修维护成本高、维护不及时等问题,在分析蓄电池故障数据特征的基础上,提出一种基于K-means算法的蓄电池故障识别方法。给出算法流程以及参数K的循环寻优选取方式,在故障聚类基础上分析并设计了故障类型的识别方法。通过对210盏太阳能路灯18个月的电流、电压等实时数据进行验证,该故障识别算法具有较高的故障识别精度。在光伏路灯实现物联网管控的基础上,该算法具有成本低、操作性强的特点。
关键词: 光伏路灯; 故障识别; K-means聚类算法; 异常数据检测
中图分类号:TP311.1 文献标识码:A 文章编号:1006-8228(2023)06-114-05
Research on fault identification for photovoltaic street light
battery based on K-means algorithm
Hou Lintao1, Yan Qiao1,2, Zhang Guiqing1,2, Jin Dongyi1, Liu Yechun1, Zhang Gongfei1
(1. School of Information and Electrical Engineering, Shandong Jianzhu University, Jinan, Shandong 250101, China;
2. Shandong Key Laboratory of Intelligent Buildings Technology)
Abstract: There are problems such as high maintenance cost and untimely maintenance of rural photovoltaic street lights. On the basis of analyzing the data characteristics of battery fault, an identification method of battery fault based on K-means clustering algorithm is proposed. The algorithm process and the cyclic optimization selection method for parameter K are given in detail, and the identification method of fault types is analyzed and designed on the basis of fault clustering. The fault identification algorithm is verified with the real-time data such as current and voltage of 210 solar street lights over 18 months, which shows that the algorithm has high fault identification accuracy. With IoT control for photovoltaic street lights, this algorithm has the advantages of low cost and high operability.
Key words: photovoltaic street light; fault identification; K-means clustering algorithm; abnormal data detection
0 引言
我國“双碳”战略和农村基础设施的建设需求,促使乡村光伏路灯的推广成为必然趋势。但乡村光伏路灯存在维修/维护成本高、维护不及时等问题。
光伏路灯通常由LED灯具、蓄电池、光伏板三部分构成,据统计,蓄电池故障是影响路灯寿命的主要因素[1,2]。蓄电池故障类型多样、表现特征不一,传统电池故障诊断方法普遍存在成本高、参数获取难等问题[3],在光伏路灯实现物联网管控的基础上,通过各类数据驱动方法实现对蓄电池的故障诊断成为可能。文献[4]提出了一种利用支持向量机(SVM)对变电站用蓄电池进行故障诊断的方法,文献[5]以光伏电站为研究对象提出了一种基于DBSCAN 密度聚类算法的故障检测算法,文献[6]对有轨电车的燃料电池系统设计了一种基于K-means聚类的故障诊断策略。以上方法在解决轻量级工程上具有优秀表现,但是尚未对路灯蓄电池故障诊断展开研究。
本文提出一种基于K-means聚类算法的光伏路灯蓄电池故障识别方法,该方法仅依赖物联网系统采集的蓄电池基本参数,通过聚类得到故障数据集合,在此基础上,根据蓄电池故障的数据特征进行故障类别的判定。
1 蓄电池故障类型及特征数据
1.1 蓄电池故障类型及参数特征
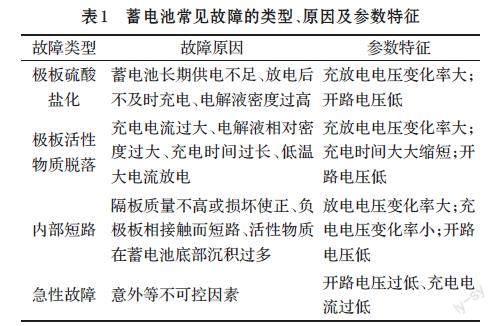
因铅酸蓄电池具有性能稳定、价格低廉、回收效益高等优点,在乡村亮化工程中的应用最为广泛,因此本文将铅酸蓄电池作为主要研究对象。蓄电池故障可分为由环境和使用问题引起的长期慢性故障和由意外因素引起的短期急性故障两大类,长期慢性故障又分为:极板硫酸盐化、极板活性物质脱落和内部短路三种[7]。
蓄电池发生急性故障时运行参数剧烈变化,通过检测蓄电池放电电压和电流即可完成故障判断。而慢性故障蓄电池性能通常随着使用时间的延长逐渐下降,且初期的数据特征变化不明显,难以通过短期单一数据对其进行故障识别。针对此类问题,很多学者提出通过提取多组蓄电池运行参数对其性能进行综合判断的思路[8-10],表1给出了蓄电池常见故障的类型、原因和特征参数的分析结果。
1.2 特征数据提取
通过分析蓄电池充放电期间的电压电流变化的特性,可以得出蓄电池在正常和各种故障情况下电气参数的变化规律。
图1给出了蓄电池的开路电压、充放电电压变化率和电流变化率在正常、急性故障和三种慢性故障状态下兩天时间的典型参数曲线。相较正常运行状态,故障状态下的开路电压数值偏低,且放电电压下降速度均快于正常蓄电池的压降速度。在极板硫酸盐化和极板活性物质脱落这两种故障状态下的充电电压增长速度,明显快于正常蓄电池的充电速度,而内部短路的充电电压增长速度相较正常蓄电池更慢。
基于以上分析,本文将蓄电池开路电压、充电电压变化率和放电电压变化率这三类数据作为故障识别方法主要的特征数据,将蓄电池充电时间和充电电流作为补充特征数据。
2 基于K-means算法的蓄电池故障识别方法
选择K-Means算法完成蓄电池故障检测的主要原因在于蓄电池特征数据集具有较为明显的分布特点:正常值的数量多、分布范围小且重叠度高、密度大;异常数据的数量明显少于正常值、分布较为离散。本文提出的故障识别方法主要分为三个阶段,即数据预处理阶段、故障数据聚类阶段和故障分类阶段,基本流程如图2所示。
2.1 数据预处理
蓄电池慢性故障的数据特征呈现出随时间累积缓慢变化的规律,因此本文采用当天物联网设备采集的实时数据与目标近两周的历史数据作为算法的初始数据集。首先对初始数据集进行格式检查和数值判断,对明显异常值和缺失值采取求其临近数据均值的方式进行重新赋值,然后计算特征数据,并在[0,1]区间内作归一化处理。
2.2 故障数据聚类
故障数据聚类阶段的核心是采用K-means算法找出数量占比最多的正常数据进而分离异常值。K-means算法是一种逐步求精的聚类算法,其原理为:对于数据集D,算法首先随机选择K个初始聚类中心,在计算各个点与聚类中心之间的欧氏距离后将每个空间对象分配给距离它最近的聚类中心以形成初始聚类,如图3所示。得到K个簇集后再次计算各个簇类中心均值,将其作为新的聚类中心。随后循环上述步骤直至各聚类中心不再变化。
在对数据进行聚类之前首先需要确定聚类中心的个数K,参数K的选取对聚类结果具有较大的影响。较为常见的K值自动选取方法有手肘法[11]、抽样法[12]等,但蓄电池数据集有别于一般的数据点分布模式:数据集中的正常样本数量占比始终较大。体现在算法中则表现为:随着K值增大,数据量最多簇集(以下称主簇集)的占比随之下降或不变;当K递增至最优时,所有数据将被合理划分给K个簇;一旦参数K过大,那原本隶属主簇集的一部分数据将被强制划分到其他簇中,主簇集的数量占比急剧下降。
针对上述情况,设计了一种循环寻优的方法来确定参数K值。参数K从2开始,逐一递增,这样对数据集循环聚类,并统计聚类结果中各个簇的数量。当聚类结果中某簇集(主簇集)的数量远大于其余簇集数量,则表示K取值未超过最优值;一旦某次聚类的结果中主簇集数量的占比快速下降,则表示K值过大,参数K取上一轮循环的值。
为验证循环寻优方法的合理性,图4给出了两组对照实验中参数K从2开始逐次递增至9所得出的历次聚类结果。两次实验中的最优K值分别为6、5。
由图4可见,在K未达到最优值前,聚类结果中始终存在主簇集数量占比极大的情况;一旦K大于最优值,大量正常数据将被强行分离出正常簇集,聚类结果严重偏离实际情况,因此上述K值选取方法在蓄电池数据集中的应用是合理的。
根据最优K值进行聚类后,统计各簇集的样本数量。数量最多的簇集归类为正常数据集,其余簇集即为故障簇集。
2.3 故障分类算法
故障分类算法需要寻找各类故障特征的差异作为分类条件。算法将异常蓄电池近两周的日均开路电压Un、充电电流In、充电电压变化率ΔUn1和放电电压变化率ΔUn2以及充电时长Tcha等历史数据作为输入,在对表1和实验结论总结后设计区分各类故障的判断方法及其各项阈值,其中充电时长将作为区分极板硫酸盐化和极板活性物质脱落这两种故障的判定条件,故障分类算法流程如图5所示。
图5中,Uoc为开路电压阈值,表示能够支持路灯工作的最低电压;I为充电电流阈值,表示能够对蓄电池进行有效充电的最低电流;ΔUcharge为充电电压变化率阈值;ΔUdisch为放电电压变化率阈值;Tcha-thr为充电时间阈值。
对异常数据每日均值进行判断后可得到蓄电池每日的故障状态的“标签”,统计15日的故障标签:若某一蓄电池被标记某种故障类型的次数超过十次,同时此故障在近三日内标记次数不小于二次,则该蓄电池最终被判定为该类故障。
3 实验验证
3.1 实验数据
本实验采用某物联网智慧路灯运维系统采集的210盏光伏路灯的运行数据,其中包括蓄电池电压、电流、功率、充放电状态等。其中蓄电池额定电压12V,额定容量20ah。数据记录时间为2021年1月1日至2022年6月7日,采样间隔5min,共约3266万条数据记录。
3.2 实验结果分析
为验证1.2节确定的三维故障特征数据的合理性,进行了四组特征数据的空间分布实验,四组数据分别为:(a)开路电压Uoc、充电电压变化率ΔUcharge和放电压变化率ΔUdisch;(b)充电电压Ucharge、充电电流Icharge和充电电流变化率ΔIcharge;(c)放电电压Udisch、放电电流Idisch和放电电流变化率ΔIcharge;(d)放电电压Udisch、充电电流变化率ΔIcharge和充电电压变化率ΔUcharge。其分布情况如图6所示。
由图6可知,只有a组实验中蓄电池开路电压值、充电电压变化率和放电电压变化率组成的特征数据符合分布范围小且密度大、异常数据数量少且分布离散的特点,而b、c、d组实验中组合的特征数据无法在K-Means算法中明显体现异常点的特征。
图7(a)给出了某次实验中故障数据聚类算法运行后的各簇集在空间中的分布情况。可以看出算法能够自动选取适当参数K并较好的完成蓄电池各个特征数据的聚类。图7(b)为各最终故障数据在空间中的分布图。实验中Uoc取蓄电池额定电压的80%;Ithr取蓄电池额定容量的5%;ΔUcharge取同时段正常蓄电池的充电电压变化率均值;ΔUdisch取同时段正常蓄电池的放电电压变化率的最大值;Tcha-thr取同时段正常蓄电池的日均有效充电时长。
在观察实验后各类故障数据发现:急性故障蓄电池的平均开路电压为2.9V,远低于蓄电池12V额定电压;内部短路的充电电压增长速度分布在0.134~0.186V/h之间;极板硫酸盐化和极板活性物质脱落故障的充电电压增长速度分布在0.279V/h与0.432V/h之间,均与0.233V/h的平均值有较大差距,图中故障数据点位置分布情况均符合其特征表现。
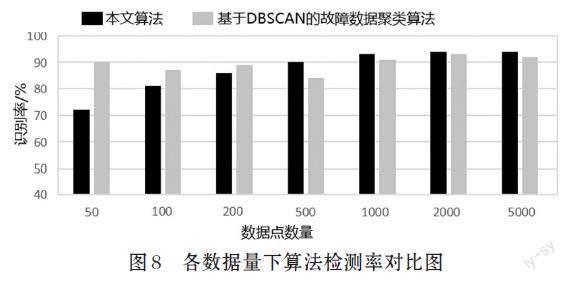
图8给出了本文的故障数据聚类算法与基于DBSCAN的算法在50~5000个数据规模下的故障识别率对比结果。
K-Means聚类算法以数据点之间的欧式距离作为簇集划分的指标,数据点的数量对识别率有着较大影响。由图8可以看出,本文算法在数据数量较少的情况下识别率偏低,但随着数据总量的增加,识别率也随之上升并逐渐稳定。而DBSCAN是基于密度的聚类算法,虽然其性能受数据点数量影响较小,但参数MinPts、Eps的调参过程复杂,且参数组合会直接影响聚类效果,所以识别率难以稳定。实验结果表明本文采用的故障识别方法的识别准确率在数据规模较大的情况下达到94%左右,具有良好的识别效果。
4 结束语
本文分析并总结了光伏路灯蓄电池常见的故障原因、类型以及故障数据的特征表现,在此基础上设计了蓄电池故障识别算法并对其运行结果进行分析。实验表明本文算法可以实现蓄电池故障的无监督自识别,在面对常见的蓄电池故障识别中都有较高的准确度。
参考文献(References):
[1] 刘奇.太阳能LED路灯智能控制系统设计与研究[D].硕士,
湖北工业大学,2020.6
[2] 隋婉婉.基于物联网技术的太阳能路灯测控系统[D].硕士,
聊城大学,2015.6
[3] 刘国平.轨道交通中的铅酸蓄电池故障分析[J].电子技术,
2022,51(1):152-153
[4]李洪江,太涛见.基于支持向量机的变电站蓄电池故障诊断
方法[J].云南电力技術,2020
[5] 左世强.光伏电站设备运维平台的设计与实现[D].硕士,
四川:电子科技大学,2020
[6] Algorithms; Investigators at Southwest Jiaotong University
Discuss Findings in Algorithms (A discrete hidden Markov model fault diagnosis strategy based on K-means clustering dedicated to PEM fuel cell systems of tramways)[J]. Energy Weekly News,2018
[7] 王利杰.铅酸蓄电池故障在线诊断及修复技术研究[D].
硕士,辽宁:东北大学,2015
[8] 关健生.蓄电池组监控与故障诊断管理系统[D].硕士,福建:
厦门大学,2007
[9] 付腾,姚志成,彭建军.基于模糊数学的锂电池组故障诊断[J].
电子设计工程,2012
[10] Pritam Kumar Gayen,Rajib Majumdar,Subhradip Mondal;
Development and implementation of adaptive solar module-and battery characteristics-based real-time power management for solar battery system under grid-connected and‐islanded conditions[J].International Transactions on Electrical Energy Systems,2020
[11] Sammouda Rachid,El Zaart Ali. An Optimized Approach
for Prostate Image Segmentation Using K-Means Clustering Algorithm with Elbow Method[J]. Computational Intelligence and Neuroscience,2021
[12] 田森平,吴文亮.自动获取k-means聚类参数k值的算法[J].
计算机工程与设计,2011
