利用无人机机载雷达测量进行输电线路竣工通道检测分析
2023-06-09 08:13:42郭力驰
湖北电力 2023年1期
左 罗,田 其,郭力驰
(1.国网湖北省电力有限公司中超建设管理公司,湖北 武汉 430000;2.湖北省电力勘测设计院有限公司,湖北 武汉 430000;3.国网湖北省电力有限公司,湖北 武汉 430077)
0 引言
输电线路建设如火如荼,每年都有大批的输电线路工程竣工。在交付运营前,都需要对输电线路工程进行检查验收。竣工验收除确认工程的施工质量外,还需要对线路走廊的障碍物清理情况进行验收,确保线路运行安全。目前输电线路工程通道验收主要采用人工作业模式,需要验收人员翻山越岭沿电力线通道进行巡视,依靠经验判断是否存在危及电力线安全运行的因素。验收人员在地面目视电力线,特别是在植被茂密地区,存在很大的盲区,通过目视无法判断电力线与障碍物之间的净空距离,依靠手持测距仪也很难准确测量其空间距离,验收作业存在很大的主观性,缺乏定量测量依据[1-31]。目前通道验收存在以下问题:
1)验收难度大。验收人员沿着输电线路逐塔巡查,大部分输电线路远离城镇、道路,位于崇山峻岭之中,地形复杂、交通条件不便,且植被覆盖率高,验收人员沿着线路巡查验收的方式花费时间长、工作环境恶劣、劳动强度大、工作安全性低。
2)测量精度低。由于在地面检测,受到空间位置和探测仪器的限制,短时间内不能对输电线路进行全局地、详细地勘察。验收结果更多的是依靠验收人员的专业经验,不可避免地存在着缺陷发现不及时、巡查不全面等情况,因此传统的验收方式已无法满足现代电力系统的运行管理与现代电网的建设和发展需要。
激光扫描技术是一种非接触主动式快速获取物体表面三维密集点云的技术,通过该技术可以直接获取具有三维坐标、一定属性(回波、反射强度等)的海量、不规则空间分布的三维点云,同时具有一定的植被穿透能力[32-34]。通过无人机搭载激光雷达设备获取输电线路及其走廊环境内的地表高精度点云数据,实现对输电线路、杆塔等自动获取,并计算输电线与地物的空间距离,从而实现输电线路通道危险点检测,并可通过交叉跨越分析、林木分析等,提前发现隐患,达到通道验收目的。
1 利用雷达点云数据进行通道检测流程
利用机载激光雷达技术沿输电线路采集通道内的三维点云数据,经过点云数据预处理、点云分类后,可进行杆塔分析、实时工况分析、模拟工况分析等操作,实现对输电线路廊道的障碍物清理情况进行检测,以数据来支持通道验收,如图1所示。

图1 流程示意图Fig.1 Flow diagram
目前外业数据采集和数据预处理已基本成熟。多旋翼无人机具有成本低、运输方便、操作灵活、起飞场地要求低等优势。利用多旋翼无人机搭载激光雷达设备,可以沿输电线路进行仿地飞行,获取输电线路及其走廊环境内的地表高精度点云数据。通过配套的数据处理软件对激光扫描数据进行POS 解算、数据融合等预处理,输出标准格式的点云数据。
利用已有的杆塔坐标文件或者人工通过点云识别确定铁塔位置,然后根据杆塔位置和电压等级对环境的影响按照一定通道宽度对原始点云数据进行裁切,每一档数据裁切为一个文件,以减少后期运算的建模难度和计算量。
在点云分类中,采用常规的滤波算法可以分类出地面点、植被点、房屋等,但是对于电力线的分类效果并不好。机器学习算法近年来广泛应用于机载LiDAR点云处理中,相比于传统的滤波点云分类方法,机器学习算法可以自动学习分类规则,对某些复杂点云数据可以取得更为优越的分类效果。通过机器学习分类算法对分档点云数据中的电力线、杆塔、地面点、建筑物、植被等进行分类。目前自动分类并不能达到100%的准确率,尤其是耐张塔分类时,易出现错分类的情况,需要人工手动将分类不准确的类别进行修改。
利用分类好的点云数据,可以对地线、导线、杆塔等进行矢量化建模,进而计算出弧垂、挂点对塔身的距离等,实现对杆塔情况的定量分析。
利用分类后的点云数据及建模的输电线路设施进行实时工况分析,包括危险点检测、交叉跨越分析、林木分析等。通过计算每一档数据中的导线、引流线与其他地物的净空距离,并与提前设置好的净空安全距离进行对比分析,如果计算出的净空距离不满足安全距离要求,则判定为危险点[35]。人工需要对每一处判定为危险点的地方进行再次检查,确认是否存在误分类的情况,核实是否为真正的危险点。
进行交叉跨越分析前,需要对照影像,对点云数据中的“三跨”线路(公路、铁路和重要输电通道的电力线路)进行识别与分类,目前尚无法做到全自动识别。需要人工参照正射影像,将对应的“三跨”进行手动分类。
利用点云数据可以实现对较大林木的单体分割,可以确定树高、树密度等。用于分析通道内的林木生长情况。
2 案例分析
2.1 数据采集
项目试点为某竣工的±800 kV特高压项目,位于湖北省恩施土家族苗族自治州巴东县境内。采用六旋翼无人机搭载RIGEL VUX-1LR 激光雷达设备及数码相机,其最大测距达1 350 m,最大激光发射频率50万点/s。
经过多次试验飞行测试,发现要模拟出杆塔及导线、地线等输电线路设施,点云密度应超过1∶500地形图16点/m2的最低要求,点云密度越高,测量到的输电线路点云越多,但数据量也相应增加,后期数据处理工作量也相应变大,因此保持点云密度在50~100 点/m2是比较合适的。影响点云密度的因素主要有飞行高度、飞行速度、激光雷达设备的发射频率、航线重叠度等。在飞行高度选择上主要考虑激光的有效测距。飞行速度一般选择10 m/s,速度较为适中,也能保证较高的数据采集效率。采用多旋翼无人机飞行时一般是采用双航线设计,因此可以偏离输电线路中线进行航线布设,既可以提高飞行安全性,也尽可能减少了塔身的遮挡,能够获得较为完整的塔身及金具的点云数据。扫描开角一般设置为左右各45°,单航线扫描宽度约为相对航高的2 倍,点云通道宽度一般都会超过200 m,完全满足通道安全分析的要求。在输电杆塔落差较大的地区,一般采用仿地飞行模式,可以保证点云采集密度较为一致。
本次飞行采用仿地飞行模式,相对航高250 m,飞行速度10 m/s,偏离输电线路中线30 m飞行,每架次先沿输电线路左侧飞行,返航时沿输电线路右侧飞行,一共完成了20 km 线路,合计51 基塔的激光点云及数码影像的采集工作。
点云数据及影像经过处理后,点云密度达到95点/m2,检测点的高程中误差为0.05 m,影像地面分辨率为4.5 cm。
2.2 点云分类
根据杆塔位置按60 m 带宽对点云数据进行切档处理,每一档数据为一个文件。利用机器学习算法对点云进行自动分类,分类出地面点、低矮植被点、中等植被点、高植被点、低点、地线、导线、铁塔、绝缘子、引流线、交叉跨越线等。当前自动分类对于直线塔的分类效果比较好,但是对于耐张塔的分类效果并不理想,误分类的情况较多。需要人工对所有的分类数据进行一次全面的检查和修改。图2红色方框区域内就出现了将绝缘子和导线错分类成了高植被,需要人工将错分的高植被类修改为绝缘子类和导线类,否则在进行危险点识别的时候会出现错误的提醒。

图2 耐张塔点云分类图Fig.2 Point cloud classification diagram of tensioning tower
2.3 危险点检测
利用分类好的点云数据,计算导线、引流线等对其他地物的距离来判断是否满足规范对安全距离的要求。经计算,共发现有14 处植被的对地距离不满足13.5 m的安全距离要求,如图3所示。

图3 实时工况净空危险点净空危险点汇总Fig.3 Summary of clearance danger points in real-time working condition
查看N3808-N3809 区域提示的净空危险点,从点云数据中可以看出,不满足安全距离要求的植被点位于N3808 号塔附近,其相对于左侧的引流线净空距离只有12.84 m,不满足13.5 m 的安全距离要求,如图4~图6 中红色三角是标注的危险点位置。通过林木分析,可以对较大的树木实现单体化分割,统计出树高及树木密度。通过图7~图10 可以看出,在N3808_N3809 区间林木总计有810 棵,在铁塔附近的林木已基本砍伐掉了,林木分布稀疏,临近的林木高度均低于17.71 m。
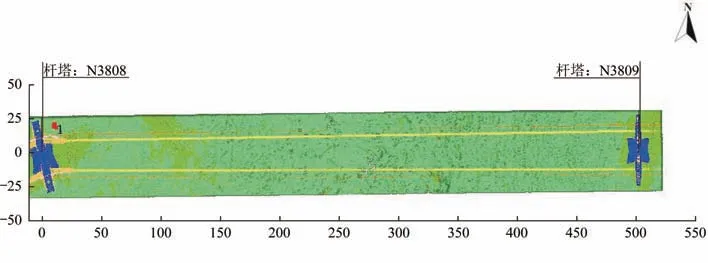
图4 N3808_N3809区间缺陷俯视图Fig.4 Top view of N3808_N3809 interval defect

图5 N3808_N3809区间缺陷正视图Fig.5 Front view of N3808_N3809 interval defect

图6 N3808_N3809区间缺陷点云Fig.6 Point cloud of N3808_N3809 interval defect

图7 杆塔区间7-8(N3808_N3809)树高图Fig.7 Tree height map of 7-8 (N3808_N3809) tower interval

图8 杆塔区间7-8(N3808_N3809)树密度图Fig.8 Tree density map of 7-8 (N3808_N3809) tower interval
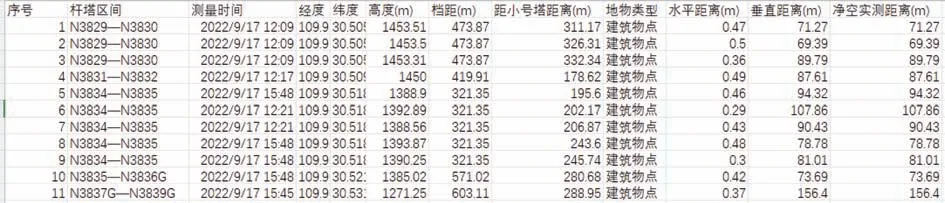
图9 交叉跨越分析对比Fig.9 Cross-over analysis and comparison

图10 N3837G_N3839G缺陷俯视图Fig.10 Top View ofN3837G_N3839G defects
通过交叉跨越分析,可以看出该段线路内仍然存在未拆除的建筑物。
通过对点云数据的分类,可以建模出导线、地线、引流线、杆塔等输电线路设施,通过计算分析可以自动识别出危险点,用户也能够更直观地看到输电线路周边的真实三维环境情况,并量测查看相关的信息,使竣工验收的资料更直观、准确,从传统的依靠人工经验判断提升到定量分析。
对自动识别出的危险点需要现场进行人工复核,现场利用免棱镜全站仪对危险点的净空距离进行了测量,与激光点云计算的净空距离误差均小于0.2 m,确认通过激光点云数据识别危险点的结果是可信的。
3 存在的问题
目前通过无人机机载激光雷达测量可以实现对竣工输电线路通道的检测,排查危险点,达到检查验收的目的。但是在试验的过程中,也发现了以下问题:
1)点云自动分类精度不高。在对输电线路设施进行精细分类时,容易出现错分类的情况,尤其是耐张塔,极易出现将输电线路设施误分类为高植被点的情况;手动分类的工作量较大,且容易出现手动分类也不完全的情况。致使在后面的建模分析时,出现错误警报,需要重复进行修改分类后再进行分析处理。
2)“三跨”信息无法自动分类,需要人为结合正射影像将点云数据进行重新分类,人工的工作量大。
3)林木虽然能够实现单体化分割,但是无法确定其树种。在进行树木生长预警分析时,只能将树木生长高度按照统一的年生长高度进行计算,无法确定其自然生长高度,对林木生长预计分析不够准确。
4)采集的点云数据为单次实时数据,对于极端工况需要进行模拟分析。目前尚无法准确模拟各种极端工况,需要进一步完善。
4 结语
通过试验可以看出利用无人机机载雷达测量技术来进行通道竣工验收是可行的。相比较传统的验收手段,无人机机载雷达测量技术能够获取到输电线路通道的真实三维环境数据,通过数据建模分析,可以自动计算出危险点,并对通道内的“三跨”、林木、建筑物等进行统计分析,为竣工验收提供详实、可靠的三维数据,达到定量分析,使得通道竣工验收有据可查。
该套操作方法流程不仅仅适用于输电线路的竣工通道检查,也适用于后期的电力线路巡检。
猜你喜欢
交通科技与管理(2022年8期)2022-05-07 23:54:10
卫星应用(2022年1期)2022-03-09 06:22:30
辽河(2022年1期)2022-02-14 21:16:19
辽河(2022年1期)2022-02-14 05:15:04
宝藏(2021年3期)2021-04-20 09:35:56
电子制作(2019年11期)2019-07-04 00:34:36
电子测试(2018年15期)2018-09-26 06:01:50
电测与仪表(2016年23期)2016-04-12 00:23:14
通信电源技术(2016年4期)2016-04-04 02:58:08
河南科技(2014年4期)2014-02-27 14:07:32