
新能源汽车制动系统解析(七)
2023-06-07 13:43江苏高惠民
汽车维修与保养 2023年3期
◆文/江苏 高惠民

高惠民(本刊编委会委员)
曾任江苏省常州外汽丰田汽车销售服务有限公司技术总监,江苏技术师范学院、常州机电职业技术学院汽车工程运用系专家委员,高级技师。
(接2022年第12期)
(12)电源故障期间的工作原理
行程模拟器切断阀(SSA)打开且间隙保持阀(SGH)关闭,从而将驾驶员踩下制动踏板在主缸油室中产生的压力施加到各轮缸,如图75所示,电磁阀控制操作如图76所示。
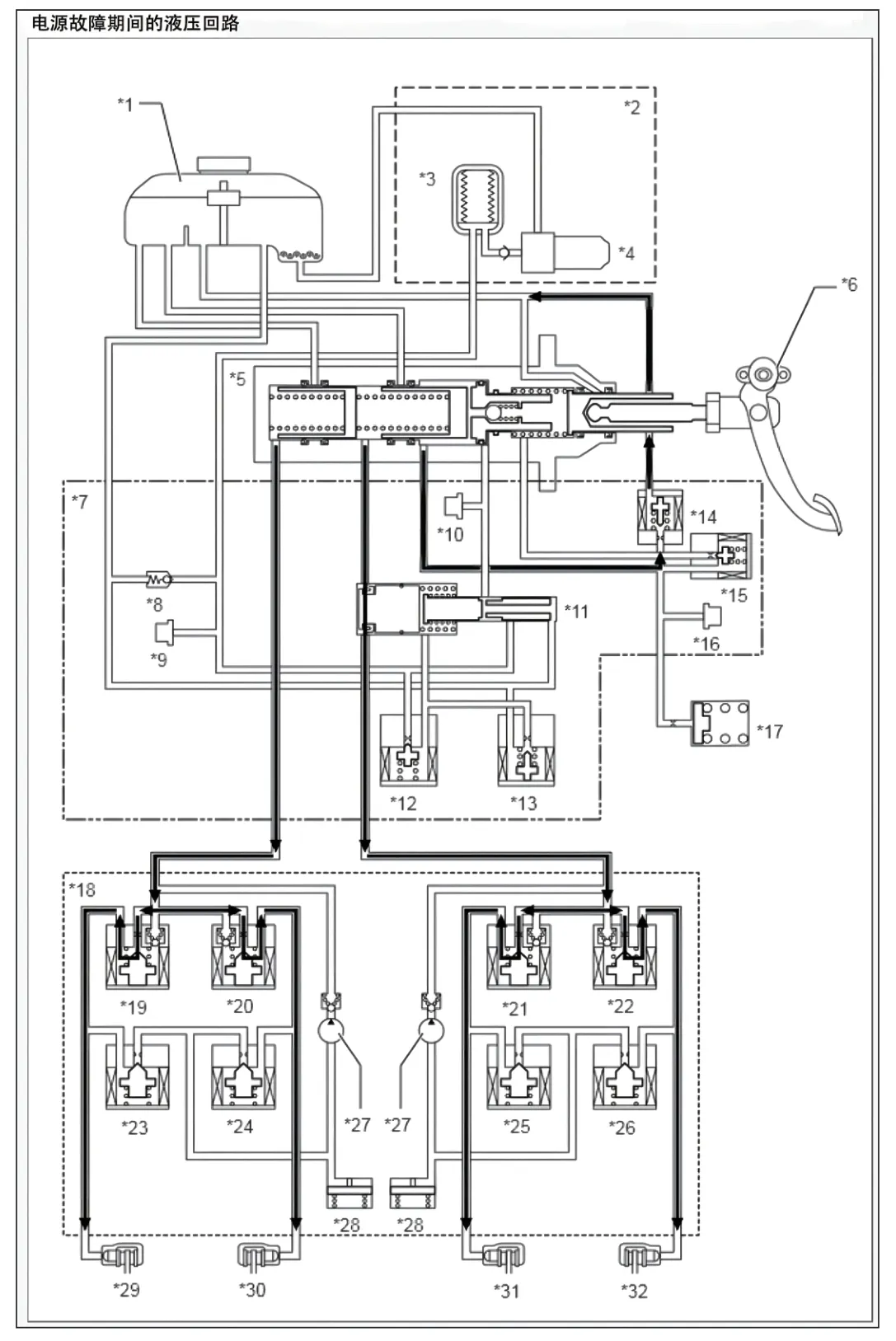
图75 电源故障期间液压回路
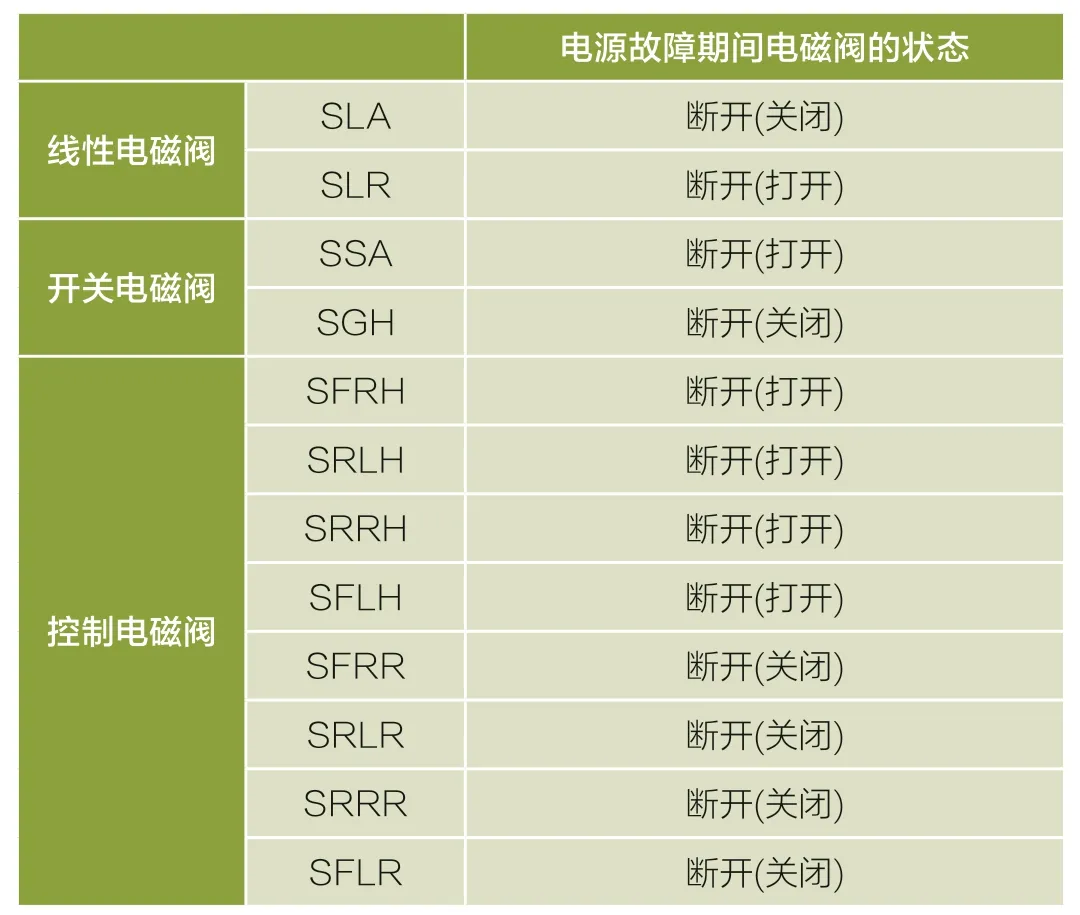
图76 电源故障期间电磁阀控制操作图
四、电伺服制动系统在本田PHEV上的应用
为保护地球环境而减少燃料消耗和CO2排放,随之装备电动动力系统的车辆逐年增产,其中包括电动汽车(EV)和混合动力电动汽车(HEV)。这些EV和HEV在减速时启动再生制动,以再生电力的形式回收动能来降低燃料消耗。为此,本田汽车研发了能够协调再生制动力和摩擦制动力分配的电动伺服制动系统。该系统协同工作时根据驾驶员的减速意图,使再生制动力和摩擦制动力的总和必须始终与驾驶员的减速需求相匹配,而且,无论再生制动力和摩擦制动力的协同都不会波动到车辆的减速特性。
另一方面,如果让车辆在倾斜道路停滞状态下长时间停滞状态或依靠驱动电机超负荷输出驱动力,电力传动系会产生热量。电机过热而降低驱动力导致车辆滑坡。其次,在自适应巡航控制运行的减速期间,有时会因摩擦制动的应用而发生能量损失。因此,电动伺服制动系统与插电式混合动力汽车(PHEV)一起运行具有高精度制动压力控制,从而可以防止电力传动过热失速以及提高自适应巡航减速和坡道起步辅助时车辆操作性和降低油耗。本文介绍已应用于PHEV的电动伺服制动系统控制所涉及的这些技术要素。
1.系统总述
电动伺服制动系统布置如图77所示。
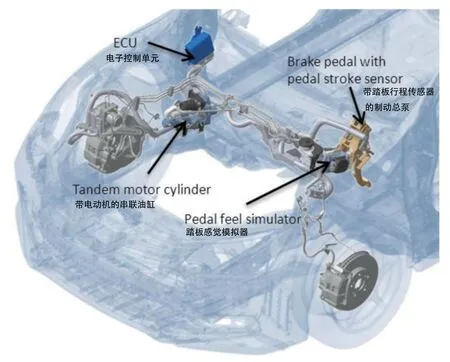
图77 电动伺服制动系统布置
该系统由踏板操作单元中的踏板感觉模拟器和踏板行程传感器、制动压力产生单元中的串联电机油缸和电子控制单元(ECU)组成。踏板感觉模拟器生成操作踏板时的行程和力。串联电机油缸根据踏板行程传感器检测到的踏板操作量,产生ECU指令的制动压力。图78显示了产生制动压力的电动伺服制动系统配置。
当踏板被操作时,ECU根据制动踏板操作量确定制动压力目标值。无刷电机运行产生制动液压,同时主截止阀关闭。这会在从动缸下游产生制动压力。制动压力通过车辆稳定控制单元(VSA)传输到轮缸。这过程中当各种协同控制功能需要制动力时,将协同控制功能要求的制动压力作为控制目标值进行控制,从而能够产生制动力。图79显示了插电式混合动力系统的框图。电动伺服制动系统和动力传动系之间的通信通过控制器局域网(CAN)总线进行传输。图80显示插电式混合动力系统的运行模式。这种动力传动系统将配置高压电池、发动机、电动机和发电机相结合,从而实现了纯电驱动、混合动力驱动和发动机驱动(EV Drive、Hybrid Drive和Engine Drive)三种运行模式。
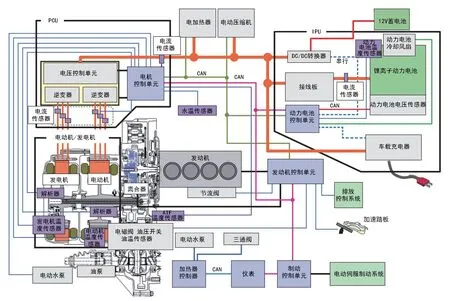
图79 插电式混合动力系统的框图
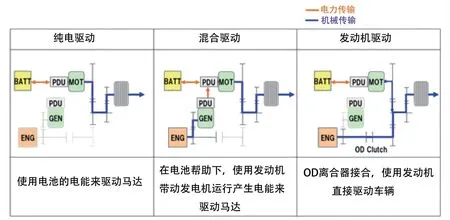
图80 插电式混合动力系统的运行模式
2.再生协调期间的制动感觉
如上所述,再生协调功能执行再生制动力和摩擦制动力的协调分配以产生驾驶员所需的制动力。再生制动力的上限根据动力传动系统运行模式等因素随时变化,如电池存储状态。它还受系统响应、通信延迟等因素的影响。为了获得良好的制动感觉,在进行协调分配时,除了考虑稳态特性之外,还考虑到瞬态特性。因此,摩擦制动力的控制需要高度精确、高度响应的制动压力控制,该控制足以补偿再生制动力的瞬时过量或不足。
电动伺服制动系统中的制动压力产生单元,如图78中所示,由带减速齿轮、滚珠丝杠和从动缸的无刷电机构成。此外,制动压力控制单元,如图81显示,由具有前馈和反馈的液压控制配置。这些部件的配置实现了高精度、高响应的制动压力控制。这就是为什么可以通过摩擦制动力来补偿由于动力传动系状态变化而发生的再生制动力的瞬时过量或不足的原因。在再生与摩擦制动协调期间PHEV运行模式转换的测试数据如图82。当切换动力传动系统运行模式导致再生制动力波动时,实际减速度为恒定减速度要求。这表明再生制动力的变化时可以通过摩擦制动力来弥补。通过以上实现了良好、稳定的制动感觉。
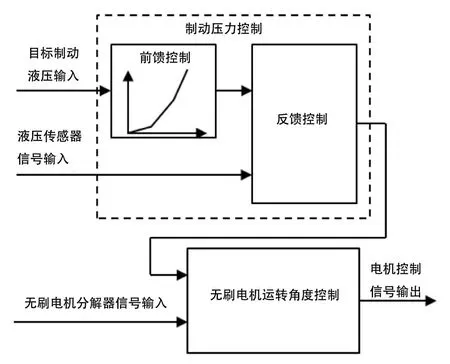
图81 制动压力控制框图
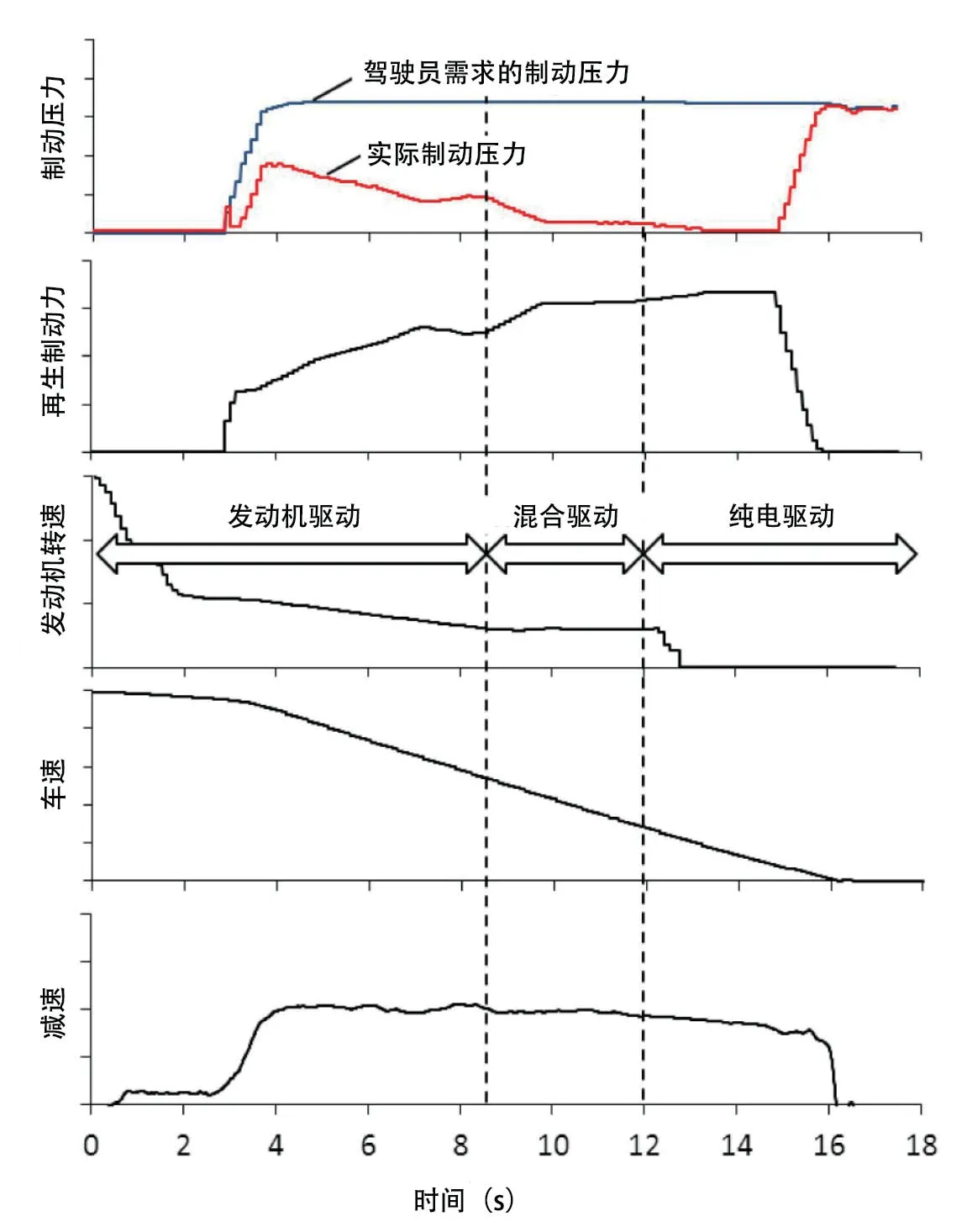
图82 再生制动与摩擦制动协调测试结果
3.失速协同控制
如图83所示,车辆在倾斜道路上停滞,车辆驱动电机的驱动力与坡度路面的坡度处于平衡状态,驱动电机处于堵转状态(电机停止转动)。如果这种停转情况持续下去,构成电力传动系统的电机线圈和驱动电路就会产生热量,如果为了防止电力传动系统过热而降低驱动力,车辆将在倾斜的道路上倒退,从而降低可操作性。
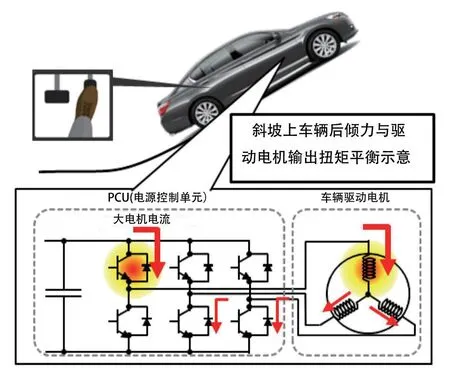
图83 动力传动系在失速条件下产生的热量
因此,开发了一种使用电动伺服制动系统来防止电力传动系统过热以及防止车辆在失速状态下滑坡的失速协同控制,并应用于PHEV。失速协同控制,如图84所示。如果电动动力传动系在失速状态下发热,则动力传动系要求电动伺服制动系统产生摩擦制动力。电动伺服制动系统通过摩擦制动力产生使车辆在倾斜路面上保持静止所需的力,防止车辆后退。当产生摩擦制动力时,动力传动系关闭车辆驱动电机工作,从而促进电力传动系的冷却并防止过热。
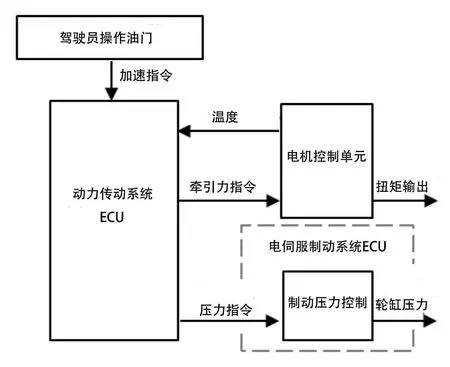
图84 失速协同控制图
失速协同控制运行时的测试数据显示在如图85。当电力传动系统达到温度阈值时,系统切换车辆驱动电机的驱动力和制动力之间的平衡程序,使车辆在倾斜的道路上保持静止,同时防止电力传动系统过热。提高车辆在倾斜道路上的可操作性。
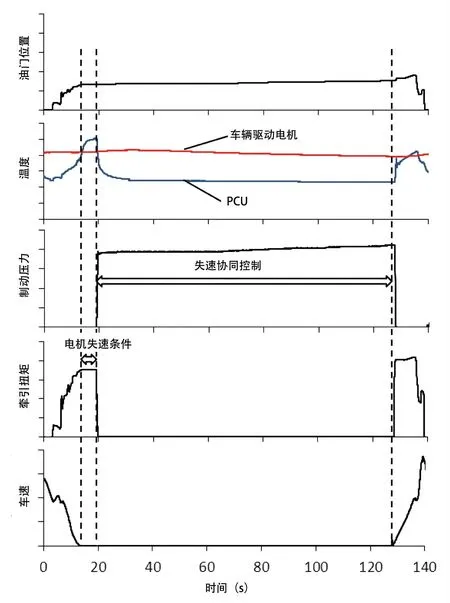
图85 失速协同控制的测试结果
4.再生自适应巡航控制
自适应巡航控制(ACC)是一种使用雷达传感器来监控目标车辆与前方车辆之间距离的功能。为了保持固定距离,车辆会自动加速和减速。该功能是由ACC控制单元对车辆之间的距离进行监控并发出加速和减速指令。加速由发动机ECU处理,减速由施加制动压力的VSA单元处理。然而,VSA单元施加的制动压力都算作摩擦损失,这是增加EV和HEV油耗的一个因素。因此,配备电动伺服制动系统的车辆能够在ACC运行时使用再生制动实现,达到与ACC未运行时相同的油耗性能。这里的问题是如何在ACC减速时适当区分使用再生制动和摩擦制动。在配备有电动伺服制动系统的车辆中,通过让ACC单元发出制动力指令来解决这个问题,该制动力是再生制动和摩擦制动的总和。电动伺服制动系统接到该指令后,相应地分配再生制动和摩擦制动。这种方法能够在不改变传统系统的ACC单元和发动机外围的通信接口的情况下实现能量再生的制动目的。再生制动功能的接口配置如图86,ACC能量再生的测试数据如图87。
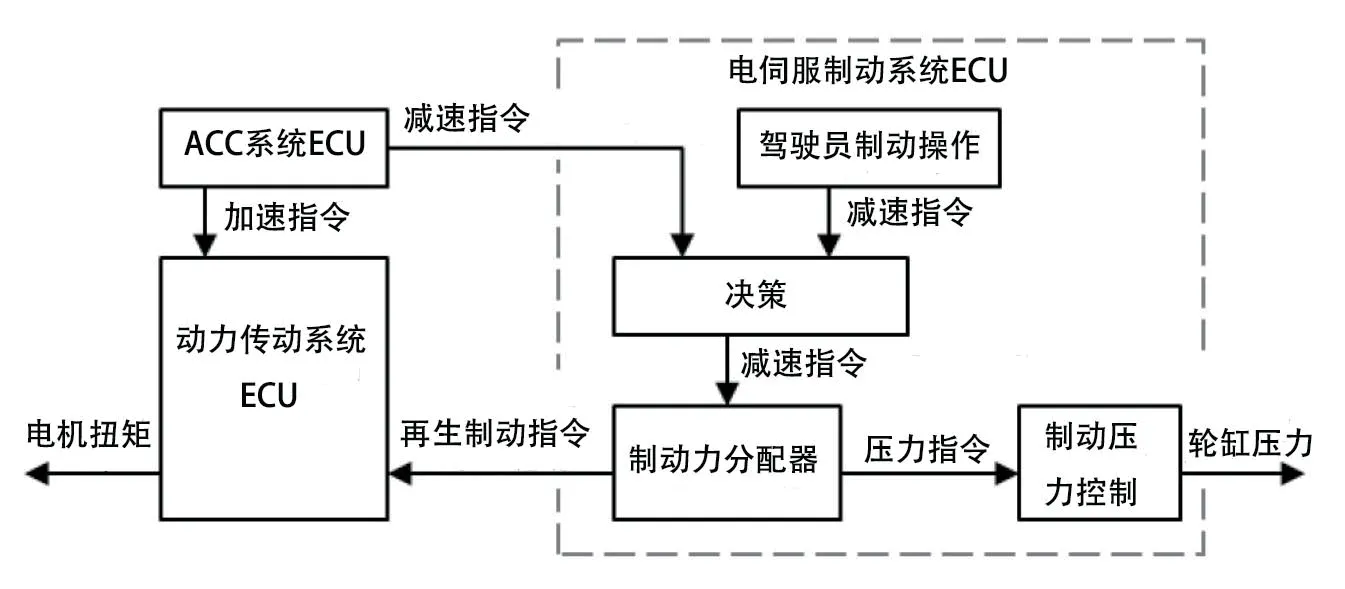
图86 ACC控制框图
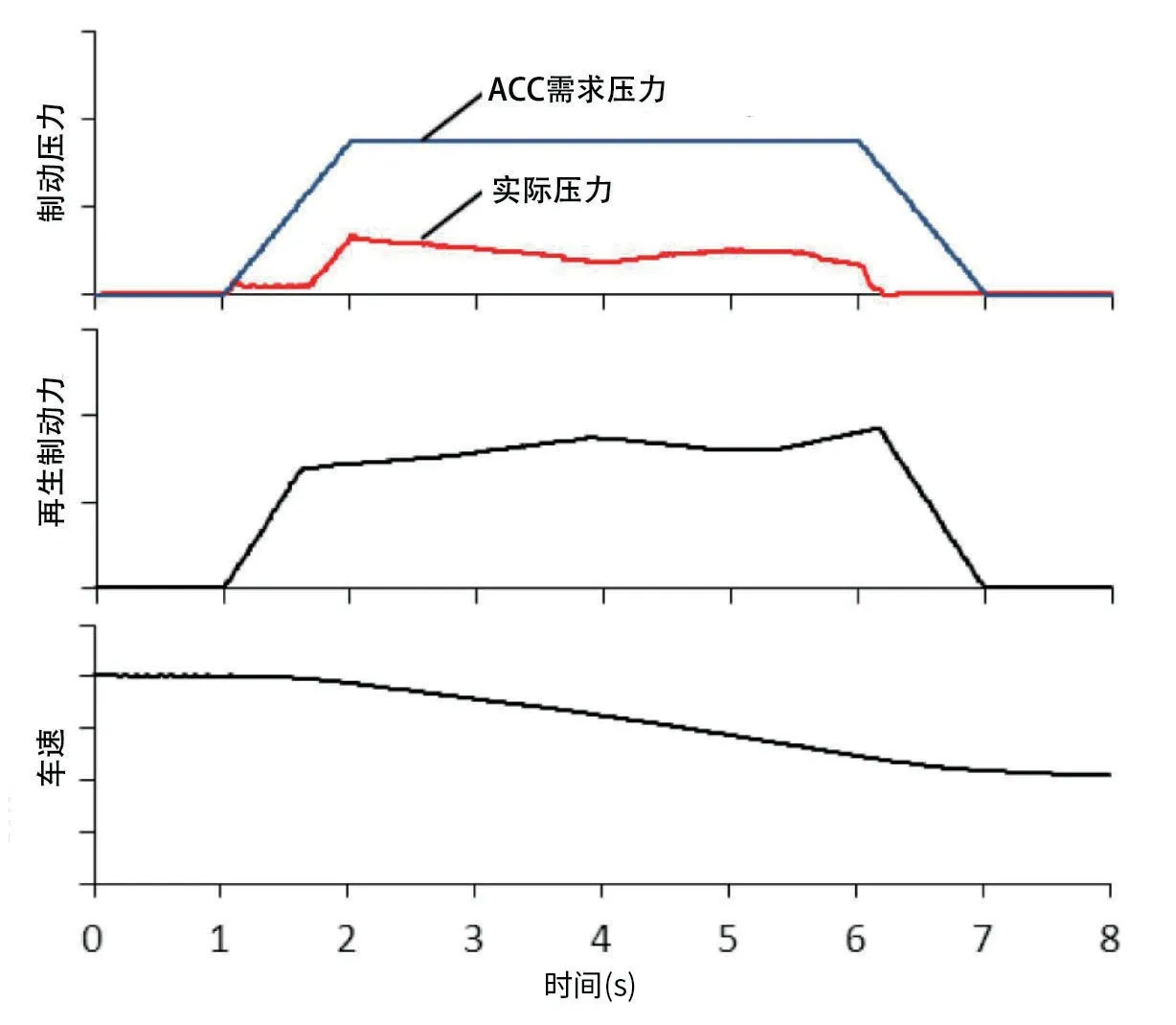
图87 再生制动与ACC实验数据
5.电动伺服制动系统的坡道起步辅助
坡道起步辅助(HSA)是当车辆在陡峭的斜坡上停止而需要重新起步上坡时,交替操作制动踏板和油门踏板。为了防止松开制动踏板时车辆后退,HSA在检测到车辆在倾斜路面上起步时保持一定时间的制动压力,并在踩下油门踏板时松开制动。EV或PHEV车辆,驱动电机会减弱前进驱动力而缓行后退,但是当车辆通过摩擦制动力保持静止,最常见的是将爬行力限制为零,以减少电动蠕变力引起的功率损失。因此,从坡道上坡起步时的操作性的观点来看HSA是必不可少的。在过去,这个功能是由VSA单元通过维持制动压力来实现的,然而,当HSA启动时,这会导致电磁阀启动噪音干扰,并导致制动感觉发生变化。所以决定HSA功能将由配备该系统的车辆中的电动伺服制动系统执行,而不是由VSA单元执行。当松开制动踏板时,通常制动压力产生单元工作以使从动缸活塞返回其初始位置。但是,电动伺服制动系统要执行HSA操作时,系统会改为保持从动缸活塞的位置,直到踩下油门踏板,然后系统将活塞返回到初始位置。
电伺服制动系统HSA运行试验数据如图88所示,这只不过是错开从动缸活塞返回初始位置的时间,系统基本操作与HSA不工作时相同,因此不会产生特殊的启动噪音。此外,踏板力由踏板感觉模拟器不断产生,踏板感觉不会因HSA操作而改变,保持着制动压力。通过这种方式,该系统能够防止车辆在上坡道路上起步时发生后退,而且不会让驾驶员在HSA运行时感到任何陌生感。
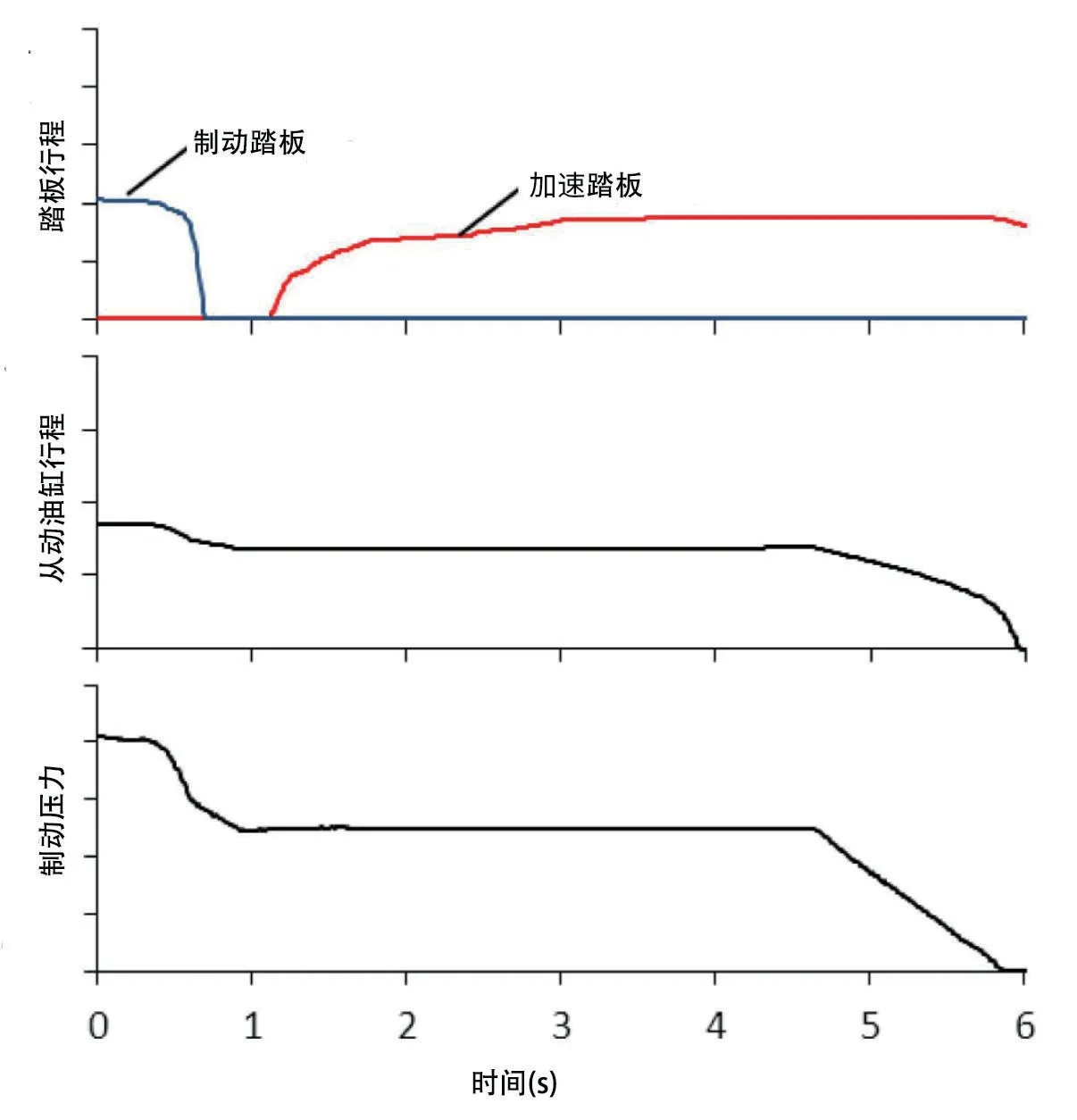
图88 电动伺服制动系统HSA实验数据
6.结论
电动伺服制动系统采用独立的踏板操作单元和制动压力产生单元,使得摩擦制动力的增减不影响踏板力。除了再生协调和其他此类减速控制之外,使用高精度、高响应性的执行器还有助于应用在车辆驾驶辅助系统的自动增压功能。综上所述,这里涉及的主要技术有:
(1)通过适当分配摩擦制动力,即使在PHEV的各种不同驱动模式下的再生制动力,也能获得良好而稳定的制动感觉。
(2)通过失速协同控制,防止驱动电机和动力驱动装置过热,提高斜坡路面失速状态下的可操作性。
(3)自适应巡航控制跟车时,通过再生制动减速,同样提高了燃料消耗经济性。
(4)不通过VSA操作,而是通过采用电动伺服制动系统坡道起步辅助功能,实现了在上坡道路上起步时防止倒车,不会让驾驶员因HSA操作而感到任何陌生感。
电动伺服制动系统为PHEV开发了各种新的增压功能。可实现高度可控、平稳、自然的制动,它不仅限于PHEV,还将能够满足未来对电动汽车自动化制动压力的精确控制的日益增长需求。并且有助于在进一步降低油耗和提高制动装置价值之间取得平衡。
猜你喜欢
车主之友(2022年6期)2023-01-30
小读者(2021年2期)2021-03-29
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
汽车观察(2018年10期)2018-11-06
车迷(2017年10期)2018-01-18
北京汽车(2017年3期)2017-10-14
黄河之声(2017年13期)2017-01-28
