
浅谈沉浮控制台在某型船的应用
2023-06-06 03:27:02陈嫦娥
中国水运 2023年5期
陈嫦娥
(沪东中华造船(集团)有限公司,上海 200129)
随着船舶自动化、智能化的发展,船舶上采用的自动化设备日趋多样化、成熟化,如主机集中监控装置、电站自动控制系统、自动操舵仪、航迹仪、自动灭火装置机舱等。近年在船舶姿态计算、稳性评估、装载计划制定等方面向信息化深入发展。《钢质海船入级规范》(2022)[1]中规定:所有散货船、船长100m 及以上的所有第I 类船舶、船长150m 及以上的矿砂船、兼用船,应配备经认可的装载仪,并对装载仪提出了硬件、软件和安装验收等要求。《船舶与海上技术 计算机应用 船用装载仪》(GB/T29587-2013/ISO16155:2006)[2]中详细地规定了船用装载仪的要求。装载仪的配置,一方面方便船员确定船舶的排水量、吃水、纵横倾,检查完整稳性、破舱稳性、总纵强度、建立弯矩分布等,另一方面实现自动、半自动和手动编制配载计划,同时校核船舶的稳性和强度,监测装载状态,提高船舶的安全性。基于装载仪的使用经验,类似的设备在国内特种船舶上开始小范围的使用,如浮态监控和调整系统、姿态安全控制系统、沉浮控制台等。本文就某型船搭载的沉浮控制台,浅析其组成、工作原理及工作流程,并针对作业过程中的故障、报警情况提出解决方案。
1 沉浮控制台组成及功能
沉浮控制台由台架、计算机、液位遥测系统、阀门遥控控制板、显示器、显示屏、打印机、压载泵遥控PLC 模块、压载泵出口压力显示表等专业设备组成,可实现阀门遥控功能、液位监测功能、压载泵遥控启停控制、视频监视显示、辅助决策、联络通信、电源失电报警、船舶姿态报警等功能。外观如图1 所示。

图1 沉浮控制台外观图
计算机内搭载“沉浮通讯显示软件”及“稳性和总纵强度实时处理应用软件”,用于显示沉浮信息和进行沉浮计算,可实现与损管监控台、液位监测系统的通讯,计算排水量、浮心和破舱稳性、总纵强度、液舱重量,提供沉浮压载方案和操作提示,决策破损扶正方案和操作提示,对危险状态进行预报报警,具备数据记录存储和打印输出功能。
液位遥测系统通过与液位监测系统的通讯,可以实现与在计算机和显示屏上实时显示所有监测舱室的液位信息、六面吃水测量值、沉浮舱吃水测量值,并具备打印功能。
压载泵遥控PLC 模块通过操作指示灯和按钮实现对船上压载泵的遥控启停,在应急情况下,可对前后压载泵组进行远程一键切断。
阀门遥控控制板可实现对阀门遥控系统阀门所有开关的控制并在控制板显示阀门的开关状态。
2 沉浮控制台工作原理
沉浮控制台设置与损管监控台、液位监测系统、液压动力单元、电磁阀箱的通讯接口,可通过接口协议采集破损信息、液舱装载信息、液压动力单元报警情况、阀门开关量信息。破损信息、液舱装载信息传输至计算况、阀门开关量信息实时在对应的控制面板显示。沉浮配载方案、扶正方案制定后,通过打印功能分发至操作人员手中,操作人员根据方案通过阀门遥控系统控制板、压载泵遥控控制面板、液压动力单元遥控控制板输出阀门、压载泵、通道设备的操作信号,实现船舶的沉浮作业和扶正作业。工作原理如图2 所示。
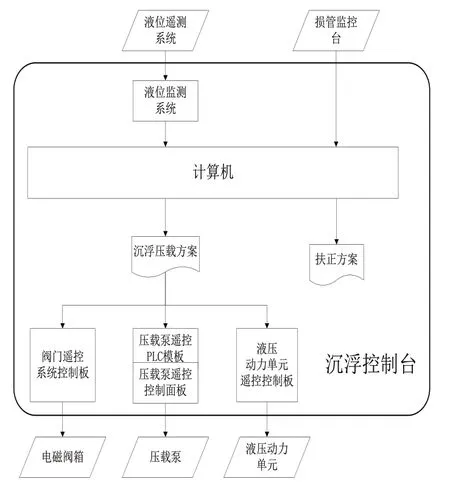
图2 沉浮控制台工作原理图
3 沉浮控制台操作流程及注意事项
3.1 沉浮作业操作流程
沉浮作业主要分为下沉和上浮两个阶段。每个阶段包括确认船舶状态、制定进水/排水方案、进水/排水阶段、确认浮态四个过程,如图3 所示。
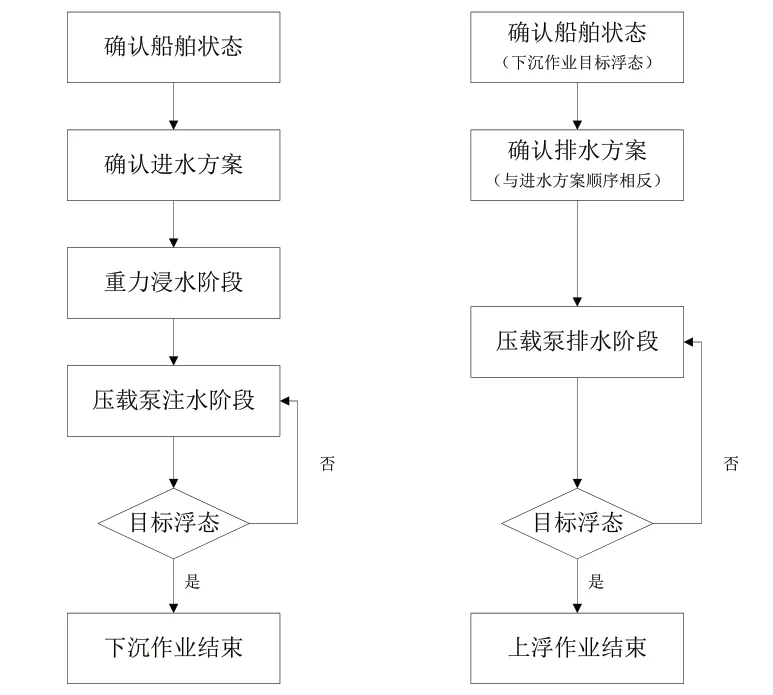
图3 沉浮作业流程
沉浮作业开始前,需确认船舶的状态。主要确认压载舱内流水孔、空气孔和吸口畅通,液压阀门遥控装置正常工作,与沉浮系统运行有关的设备及气、电供应正常,浸水舱边界的水密门、舱壁门、人孔盖等均处于关闭状态,船舶横倾纵倾满足工作要求,水文气象条件符合作业条件等。
准备工作确认完毕,开始进水方案的制定。使用沉浮控制台,进入计算机操作界面,根据船舶遥测吃水,修正稳性配载软件中作业水域比重,不明重量和重量矩,使配载软件计算浮态与船舶实际浮态一致。根据拟定的下沉作业目标浮态输入首吃水、尾吃水目标值,用配载软件计算需要进水的压载水舱及进水量,并对重力进水方案进行计算调整,打印计算机屏幕显示预案。
预案确定后,分发预案,开始下沉作业。首先打开浸水通道设备,保持浸水大舱通畅。接着开始重力浸水操作,按照预案要求对指定的压载水舱进行重力浸水,由船中至首尾的顺序依次打开重力浸水通海阀箱,左右两舷对称压载舱同时浸水,同时注意船舶浮态及稳性,调节阀门开度保持船舶平稳下沉。观察重力浸水压载舱的液位变化,当进水速度明显减缓时,关闭浸水通海阀门,停止重力浸水。
重力浸水完成后,开始压载泵注水阶段。打开前后压载泵,由船中至首尾的顺序依次对称注水,调节阀门开度保持船舶平稳下沉。当吃水离目标吃水约0.5 米时,关闭所有阀门,暂停注水,按计划对相关部位进行密性检查,密性检查结束并确认安全后,重新开始注水,船体达到预定目标浮态时停止泵注水。整个过程应关注船体吃水、初稳性高的变化情况。
上浮作业与下沉作业顺序相反。由首尾至船舯的顺序依次对称排水,调节阀门开度,使船体平稳上浮,至目标浮态即下沉前的浮态。上浮作业完成,关闭阀门和压载泵。
下沉作业和上浮作业过程应关注船舶稳性及浮态,出现报警情况采取应急措施,保证作业过程的安全性。
3.2 作业过程中故障、报警及解决方案
沉浮作业期间可能出现各种故障和报警,作业前需制定处置预案。
3.2.1 液位监测系统发生故障
沉浮作业通过液位监测系统来监测船舶的六面吃水及各液舱的装载和液位变化情况,若液位监测系统发生故障,导致显示的吃水及液位与实际值差异过大,就会影响作业的顺利进行。
作业期间如果液位监测系统发生故障,应立刻暂停注水,通过手动测量管测量相关液舱液位高度,确认液舱状态量,消除故障后继续作业;若一时不能修复,需继续作业时,应放慢注水速度,同时密切观察船上设备测量的横摇角及纵摇角来判断船舶的纵横倾状态。
3.2.2 沉浮作业过程船体出现过大横倾
本船压载水舱数量较多,沉浮作业阶段压载水进水量大,如果作业过程中由于部分阀门故障,不能正常启闭,或者是阀门开度调节不及时,导致不对称进水,可能导致船体在短时间内出现过大横倾,严重时会危及到船体本身的安全。
作业过程中需逆风航行,过程中禁止大舵角操船,避免由于风向或者操舵而引起的较大横倾;作业过程中出现船舶横倾角度过大,超过系统报警上限值时,应注意控制阀门的开度,预防横倾进一步扩大或暂停倾斜一侧压载舱进水,减小横倾;横倾较大时,立即切断通海阀,暂停作业,对故障进行确认、排除后再继续进行作业。
3.2.3 计算机软件故障
沉浮作业通过计算机软件进行沉浮作业辅助决策,制定沉浮预案,确定各压载舱的进水量,并对船在下沉和上浮作业过程中的稳性和强度进行计算校核监控,若计算机软件发生故障将导致无法制定沉浮方案、监控作业过程的稳性和强度,影响作业的顺利进行。
作业期间如沉浮软件故障,应立刻对软件进行恢复;若软件一时不能修复,应暂停作业,若需继续进行作业时,应放慢注排水速度,同时通过液舱容积表及静水力表等手工对船舶浮态进行计算,制定后续注排水方案,保障作业继续进行。
3.2.4 压载泵或遥控蝶阀故障
沉浮作业通过压载泵对各个压载舱进行注排水,通过阀门遥控系统控制阀门开闭/开度情况调节进排水速度,若压载泵或遥控蝶阀故障,就会影响注排水的操作,无法顺利执行沉浮方案。
若压载泵出现故障,应迅速启用备用压载泵,同时立即排查原因,进行修复;若沉浮控制台无法操作遥控蝶阀,立即转至分控箱操作,若仍无法实现,应立即转至就地进行应急手摇泵操作;若所有压载泵短时间内不能修复,需停止作业,采用扫舱泵调整压载舱水量,保障船舶安全。
3.2.5 人员安全
沉浮作业过程浸水区域将大量进水,作业期间若有人员不慎落水,就可能造成人员安全事故。
作业期间浸水区域应设立警示标志,并安排人员值守,禁止无关人员随意进入;人员若因工作需要进入浸水区域必须穿戴救生衣;若发现人员落水,应立即中止作业,组织救生人员施救。
3.3 经验总结
沉浮作业过程需注意以下两点:
(1)本船压载舱的高位报警设置为舱容的95%,但由于作业过程中船舶的纵倾、横倾较大,部分压载舱的装载量未达到报警值时液位传感器的高度已达到报警值,导致注水量未到要求即高位报警,注水量达不到预定的要求。当压载舱高位报警后观察沉浮配载软件中显示的注水量,若未达到预案要求的注水量,则继续注水,即以软件显示为准。
(2)配载软件的初步设置中,船舶的重量组成中有一项为不明重量的项目。该项目为船舶不可准确统计或不能把控重量的总和。船舶重量作为配载软件的计算依据,不明重量的修正尤为重要,其重心的位置直接关系软件在制定配载方案和监控船舶状态时的计算结果。沉浮配载软件中修正不明重量的机制为快照模式,无法进行实时修正,故为减小误差,尽量平静的水面进行修正。此时船舶状态较为稳定,液舱液面较平静,传感器传输的液舱高度、吃水情况误差较小。不明重量修正后计算的船舶六面吃水、横倾角与船舶实际浮态保持一致。该项重量需在试验前条件满足的情况下进行修正,沉浮控制台在使用阶段,定期复核浮态的计算结果和船舶实际浮态进行比较,当出现较大差距时,及时进行不明重量的修正。
4 结语
沉浮控制台实现了船舶稳性和强度监控、沉浮方案制定、吃水和液舱监控、沉浮遥控操控等功能,大大提高了作业过程的船舶安全性,实现操作自动化,提高工作效率。此类装载仪在某型船上的有效应用,为同类设备在更多特种船舶上的使用提供了可行性参考。通过优化装载仪的配置、改进软件的计算功能,可实现特种船舶的特殊作业的信息化,提高自动化水平,更好地完成使命任务。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
舰船科学技术(2022年22期)2022-12-13 03:36:32
舰船科学技术(2022年10期)2022-06-17 06:27:26
舰船科学技术(2021年12期)2021-03-29 01:28:06
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
海洋工程(2016年2期)2016-10-12 05:08:07
江苏科技大学学报(自然科学版)(2015年4期)2015-12-17 12:42:32
广东造船(2015年6期)2015-02-27 10:52:45
小天使·一年级语数英综合(2014年7期)2014-06-26 14:45:18
船海工程(2013年6期)2013-03-11 18:57:35
