抑制相干噪声的照明系统仿真与误差分析
2023-06-05 09:22齐先豪张凌华吴先钰边小月
应用光学 2023年3期
齐先豪,韩 森,2,张凌华,2,吴先钰,程 俊,边小月
(1.上海理工大学 光电信息与计算机工程学院,上海 200093;2.苏州慧利仪器有限责任公司,江苏 苏州 215123;3.苏州科技大学 物理科学与技术学院,江苏 苏州 215009)
引言
现代干涉测量技术作为光学检测的重要手段,在光学加工和产品质量检测等方面具有举足轻重的地位。与一般的光学成像测量技术相比,干涉测量技术具有精度高、分辨率高、量程大等不可取代的优势[1]。但是使用激光作为光源时,也会带来一些弊端。例如,高度的时空相干性,使得激光发生光学干涉时具有极端的灵敏性。再者,因光学元件在微观尺度上存在缺陷,在进行干涉测量时会发生局部的反射和衍射,进而产生相干噪声,破坏干涉图的空间结构,引起了测试面和波前形状的测量误差。抑制相干噪声,去除其对干涉测量结果的影响,一直是目前光学检测行业追求的目标[2-3]。
为了抑制相干噪声,许多学者付出了努力,提出了各种不同的方案。例如,可在成像目镜的焦面处放置旋转毛玻璃,使入射到旋转毛玻璃上的激光作为扩展光源;改变入射到干涉仪上光束的入射角,进而得到平均化的测试结果。上述方法均为从硬件角度进行的改进,从非硬件角度来说,也有众多方案,如对获取的面型或波前数据进行低通滤波处理,滤除高频部分的相干噪声等[4]。行业内,Zygo 根据离轴照明的技术原型,率先提出了采用离轴环形光源干涉仪抑制相干噪声的方案。这种光源只对光学干涉腔内产生干涉,有效抑制了干涉腔外相干噪声的产生,但其存在一些缺陷,如系统复杂、成本高、产生的干涉条纹对比度较低等等[5]。为此,本文基于离轴照明抑制相干噪声的技术原理,重新设计了一种具有抑制相干噪声能力的照明系统,针对此系统进行仿真和误差优化,从而提升其效用。
1 抑制相干噪声原理
在采用经典照明系统Fizeau 干涉仪中,离轴点光源S 发出光波,其路径如图1 所示。光波经过分束器和准直透镜后,以与光轴倾斜一定角度的平行光束出射。平行光束一部分经过参考面上P 点反射回去,另一部分透射光线打到测试面上Q 点,经过测试面反射回去。包含被测面上Q 点信息的光线与在P 点被反射回去的参考光线在准直透镜前重合,发生干涉,干涉条纹经过准直器和分束器后成像于CCD[6-9]。
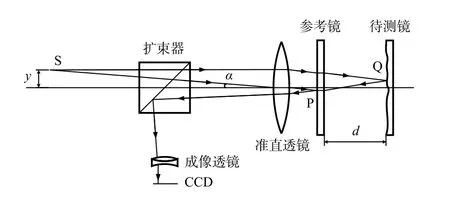
图1 离轴点光源干涉测量原理Fig.1 Schematic of interferometry of off-axis point light source
当离轴量为r的点光源足够多时组合起来,作为半径为r的环形光源,用平均环半径表示环光源的大小,光路如图2 所示。在图2 中,点Mi是参考面上半径为rM圆弧上的点。
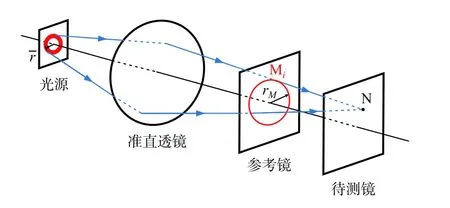
图2 离轴环形光源干涉测量原理Fig.2 Schematic of interferometry of off-axis toroidal light source
对于平均环半径为的离轴光源来说,设其最大和最小环半径分别为r2和r1,此时CCD 上N 的像点的光强可表示为[6-9]
式中:包含Q 点信息的光线在CCD 上的光强为IQ,;IR为参考面上P 点的光强;IT为测试面上Q 点的光强;λ为光源的波长;d为干涉腔长;f为准直镜焦距;y为光源S 的离轴距离。不同的离轴点光源发出的光线,经过参考面上不同点Mi和N 后都发生干涉,最终在CCD 上得到来自于光源上不同离轴点光源对同一个待测点N 的叠加测量信息。测试面上某一个待测点N 的干涉信息,可看作是由环光源上所有离轴点光源共同参与得到的[4]。以此类推,待测面上所有待测点的干涉信息叠加后可得到干涉图,其形成于环形光上各个点的积分过程,积分过程有效平滑了系统中存在的噪声,且不会改变测试面的相位信息[10]。
2 仿真
2.1 照明系统结构设计
本文仿真建模了一套能够用于19.05 mm(3/4英寸)Fizeau 干涉仪的离轴环形光源系统。光源部分的仿真光路如图3 所示,光线方向从左至右。在Zemax 软件中对照明系统进行设计,选择直径为2 mm、波长为632.8 nm 的高斯光束作为照明系统的光源进行模拟,高斯光束经过准直扩束系统和中间带有遮光部分的特殊透镜后形成环形像斑。该圆环离轴量太大,不能直接作为Fizeau 干涉仪的光源进行下一步仿真。为此,在后续系统中加入双远心光路,对环形像斑进行缩放,缩放到合适的尺寸。为得到对相干噪声较好的抑制效果,19.05 mm Fizeau 干涉仪使用环半径为0.13 mm~0.45 mm 的环形光源作为光源,后续的缩放光路在保持像质的情况下必须满足该要求。
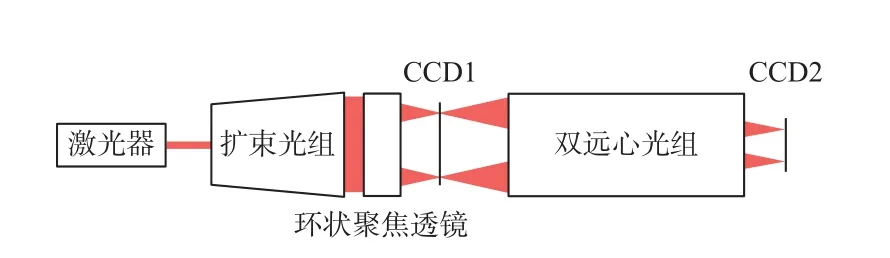
图3 抑制相干噪声照明系统Fig.3 Illumination system with coherent noise suppression
2.2 照明系统仿真
在Zemax 非序列模式中对光源系统进行仿真。采用高斯光源作为源光源,波长为632.8 nm,能量为100 W,光束宽度为2 mm。为了滤除杂散光,给光组中各透镜的前后表面均进行镀增透膜处理。在双远心光组的物面和像面处加入探测器,分别位于图4 中CCD1 和CCD2 上。CCD1 尺寸为10 mm×10 mm,像素数为600×600,CCD2 尺寸为0.6 mm×0.6 mm,像素数为600×600。通过Zemax 中光线追迹功能进行追迹,追迹108条光线,得到的结果如图4 所示。从图4 可以看出,光线追迹得到了直径为0.56 mm,环宽为90 μm 的离轴环形光斑。
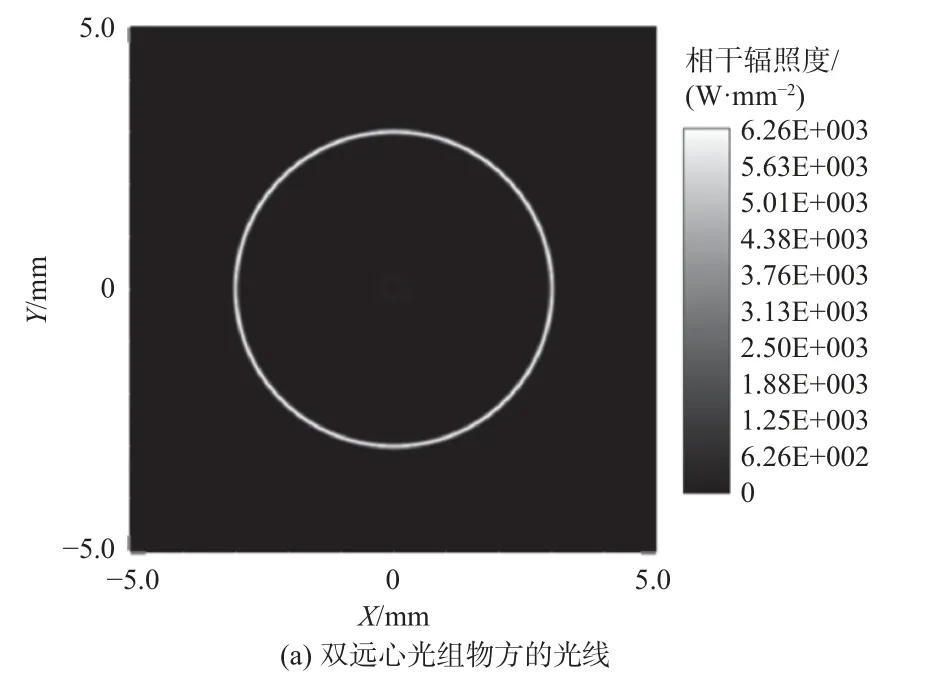
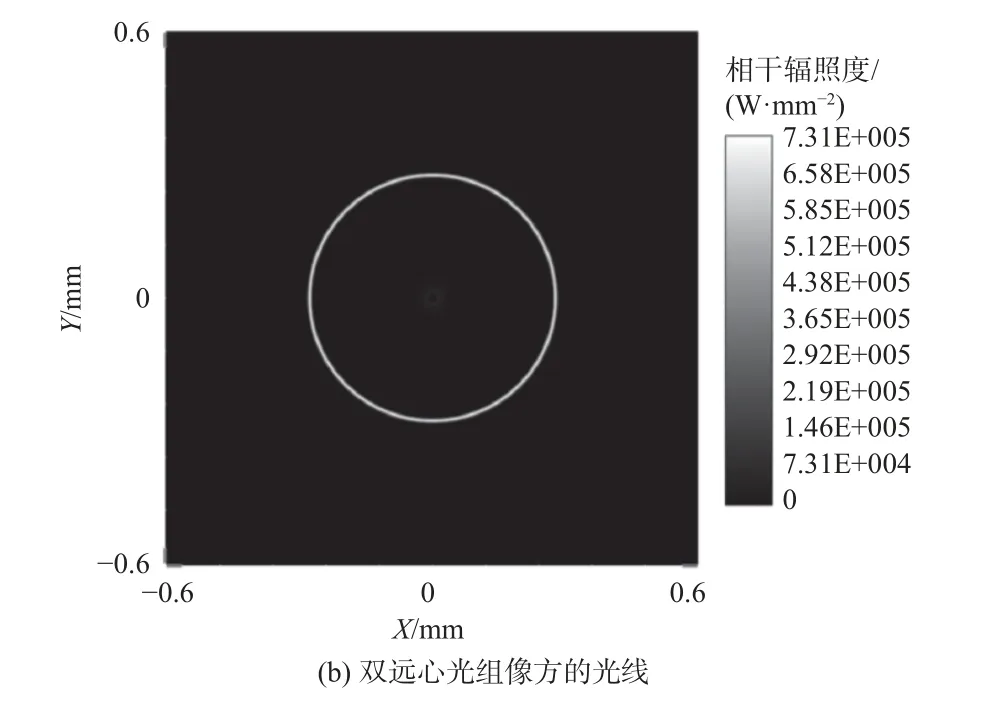
图4 CCD 上接收到的光线Fig.4 Diagram of light received on CCD
在光线经过双远心光组之前总功率为80.808 W,峰值辐照度为6.260×103W/cm2。当光线经过双远心光组后,探测器得到的图像(即最终形成的光源)总功率为80.077 W,峰值辐照度为7.307×105W/cm2。CCD 上峰值辐照度数量级由原来的103W/cm2提高至105W/cm2,峰值辐照度的提高说明后者的光线能量更为集中,表明后续光路中杂散光线的占比降低了。同时,双远心光组的加入使得光线总功率降低了不到1 W,相比功率100 W 的源光源来说,光线功率损失微乎其微。
2.3 对比仿真实验
为验证照明系统对相干噪声的抑制能力,设计了对比仿真实验。对比实验中,一组采用传统的点光源作为照明系统进行仿真,另外一组采用本文设计的离轴照明系统进行仿真。对比实验采用控制变量法,干涉系统部分光路参数完全一致,且均在准直透镜处设置噪声。引入噪声是通过布尔运算功能实现的。用圆柱模拟透镜上的灰尘、油污等圆形噪声源,用矩形体模拟透镜的瑕疵和划痕。圆柱尺寸分别为:直径200 μm、长500 μm;直径120 μm、长400 μm。矩形体尺寸为:100 μm×350 μm×100 μm、100 μm×450 μm×100 μm,2 个矩形体相对于y轴倾斜角度为-15°和10°。在被测面倾斜角同为0.05°情况下追迹108根光线,分别得到的干涉图如图5所示。
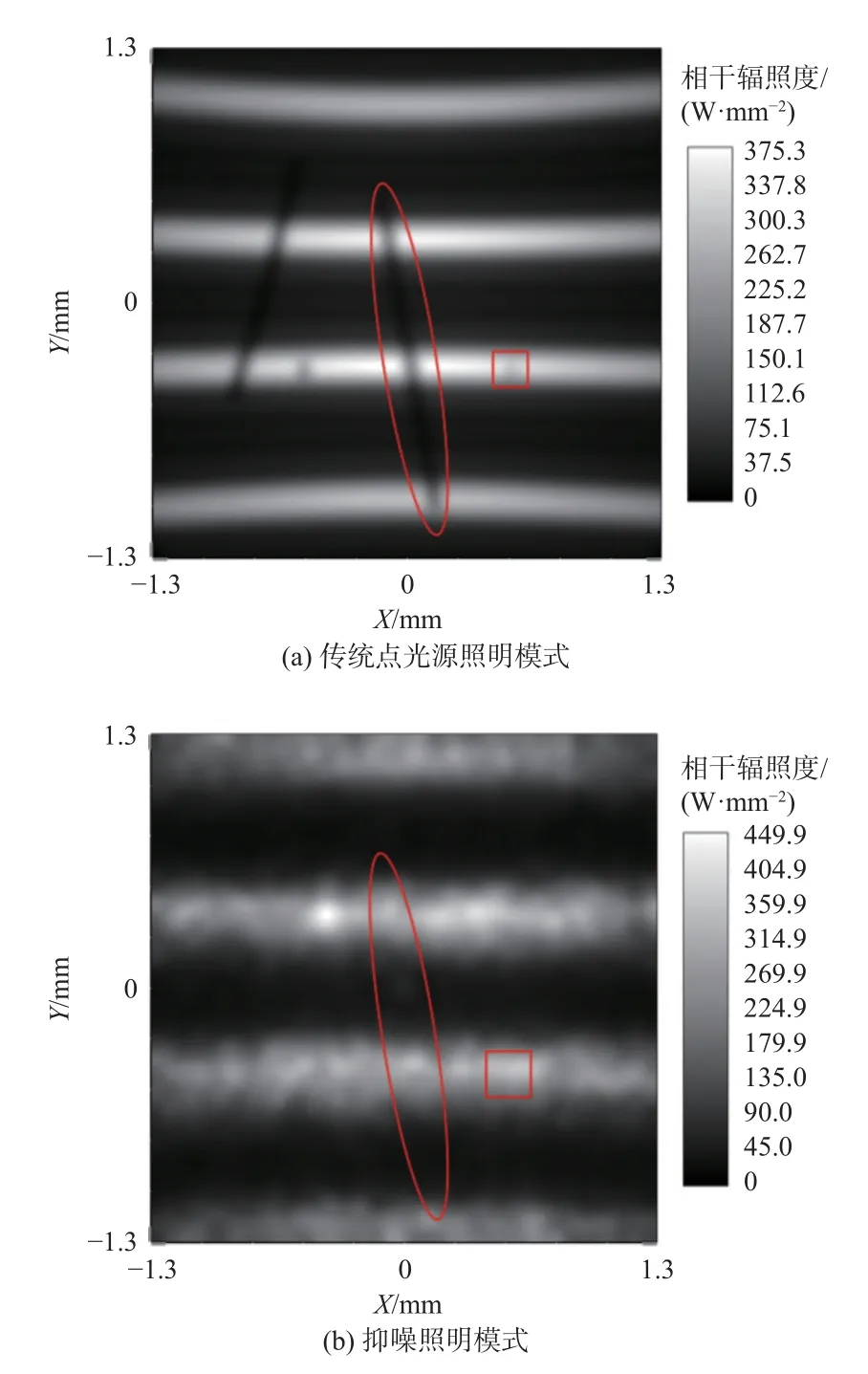
图5 不同照明模式下的干涉图Fig.5 Interferogram in different lighting modes
与图5(a)相比,图5(b)中亮条纹间的间隔更远了,这是由于在照明系统的像面处加入了散射平板导致的。在实际实验中,为去除离轴光源在CCD 探测器处引起的轴上极亮点,往往在环形光源所在平面上加入旋转的散射元件。本仿真中在光源像斑处加入了一块厚度为1 mm 的散射板,散射类型为体散射,平均光程为0.15,散射角度为7°。
在仿真中,由于Zemax 仿真功能的限制,只能模拟出静止的散射元件,无法有效模拟旋转的元件。相干光束透射进散射元件内部后,由于体散射元件内部折射率不均匀,导致光线出射方向不一致。由于加入静止散射板,使最终成像的条纹有很大的散斑噪声。这些散斑噪声使干涉条纹像素点分布不规则,导致最终得到的图像产生类似烟雾的颗粒状效果。因为照明系统加入了散射元件且仿真功能受限,使图5(b)中存在着较为严重的散斑噪声。但对于加入的划痕和圆形噪点来说,图5(b)有较好的抑制效果。图5 中标记了部分划痕和圆形噪声源在干涉图上引入的噪声。在采用传统照明模式的追迹结果图5(a)中,噪声的加入破坏了干涉图的空间结构,亮条纹之间最大峰值辐照度差异较大,对干涉测量结果的准确性带来了较大误差。在图5(b)中标记位置没有出现明显的噪声,可见在抑制缺陷引起的相干噪声时,图5(b)效果更好,证明本文系统对狭义上的相干噪声有更好的抑制效果。
3 误差分析
本文设计的照明系统的干涉仿真结果如图5(b)所示,虽然抑制了相干噪声,但干涉图的清晰度却十分低,条纹对比度也不高。本文仿真模型分为照明系统和干涉系统两部分,误差大体上分为随机误差和系统误差两大类。随机误差主要为每次仿真时追迹光线的随机分布,导致探测器上接收到的图像能量差异。对于随机误差,可多次追迹大量光线,并对这些追迹结果取平均值。在进行仿真和光线追迹时,干涉系统及照明系统的参数没有发生变化,因此将2 个系统的误差看作是仅有系统误差。
3.1 照明系统误差
进行光线追迹时,由于照明系统内部存在像差导致环厚度提升,进而影响干涉条纹对比度和清晰度。CCD 上干涉条纹对比度为
针对上式变量进行误差分析。在Matlab 中进行模拟,干涉腔长取10 mm,仅光斑厚度r2和r1为变量,得到照明系统的环宽度与对比度的关系,如图6 所示。从图6 可以看出,随着离轴光斑厚度增大,条纹对比度也逐步下降。当条纹对比度大于95%时,环宽度≤0.058 mm,即≤58 μm。
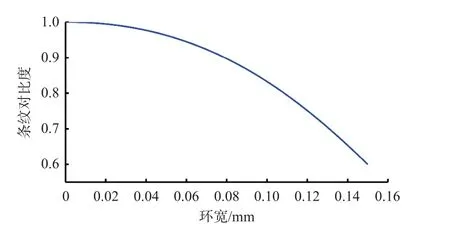
图6 环宽与条纹对比度的关系Fig.6 Relationship between ring thickness and stripe contrast
在Zemax 中对照明系统的像差进行分析,其主要像差来源于双远心光路部分,双远心光路部分的像差类型为畸变和像散。考虑到双远心光路前的像有一定的厚度,故设置在y方向上高度为3.0 mm、2.816 mm 和2.632 mm 共3 个视场,以3 个视场的成像质量评价该光组的成像设计情况。添加一系列控制操作数以控制像差、数值孔径和远心度,根据优化需要调整权重,以成像质量和不同视场的像点距离(最后形成光斑的厚度)为目标进行改进优化。优化前后双远心光路像面全视场光斑如图7 所示。优化后艾里斑半径由4.118 μm 减小至3.218 μm,三视场光斑在y轴方向上的距离(即光源的环形宽度)从90 μm 减小至42 μm。相较于优化前,像点光斑的艾里斑半径缩小了,且在3 种不同视场条件下,该光路均表现出较好的成像质量,像差均控制在理想范围内,光斑也几乎都在艾里斑内。根据图6 中的关系可得出此时理论条纹对比度为0.954。

图7 双远心光组像方点列图Fig.7 Spot diagram of double-telecentric light group image square
为了消除经过分束器反射回来的杂散光对干涉成像的影响,把照明系统像面处的辐照度信息收集到探测器内,保存成EULUMADAT 文件,再把该文件导入到干涉仪前作为干涉仪的光源。
3.2 干涉系统误差
根据(2)式中的关系,除环宽外,干涉腔长d同样会影响条纹对比度。将环宽固定为42 μm,仅干涉腔长d为变量进行模拟,得到干涉腔长与条纹对比度的关系如图8 所示。从图8 可看出,随着干涉腔长d的增大,条纹对比度显著下降。若想得到条纹对比度大于0.950 的干涉条纹,理论上干涉腔长d≤15.43 mm。为便于仿真,将干涉腔长改为10 mm,此时理论条纹对比度为0.962。
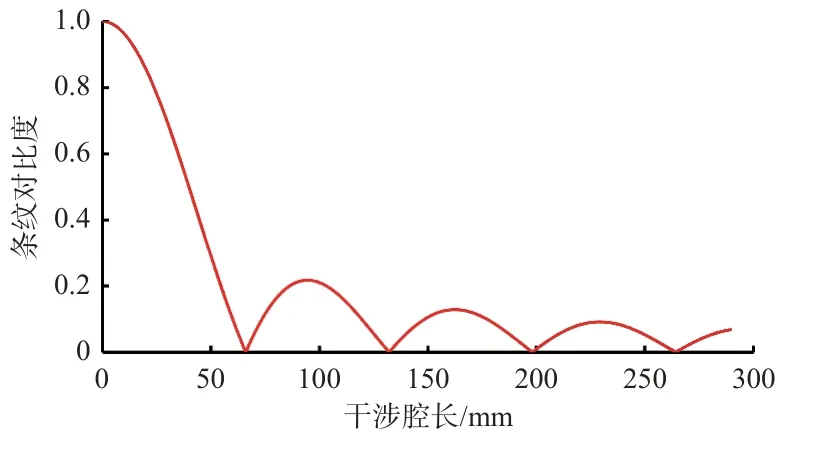
图8 干涉腔长与条纹对比度的关系Fig.8 Relationship between interference cavity length and stripe contrast
除去以上干涉腔长对条纹对比度的误差外,影响最后成像质量的还有干涉系统中镜片本身的误差,如准直镜像差。准直镜的准直效果在一定程度上也会影响最终的干涉效果,同样在Zemax 中采用阻尼最小二乘法对其进行优化。优化准直镜的像差到合理范围内,并在重新建模的干涉系统中采用优化后的准直镜片。
3.3 重新建模比较
将优化后的照明系统与干涉仪重新建模,此时照明系统光斑厚度为42 μm,干涉腔长为15 mm。经过验证,该系统在光线条数超过108后,得到的干涉图像几乎没有差别,因此可认为在达到108条光线后,仿真结果收敛,此时仿真得到的干涉图更接近真实结果。进行10 次光线追迹,每次追迹108条光线,对10 次收敛的仿真结果进行均值化处理,得到的干涉条纹图如图9 所示。图9(a)为误差分析改进前追迹到的干涉条纹。在Matlab 中导入图9(a)和图9(b)两张图片,经过计算,像面探测器得到的条纹对比度分别为0.923 和0.976。
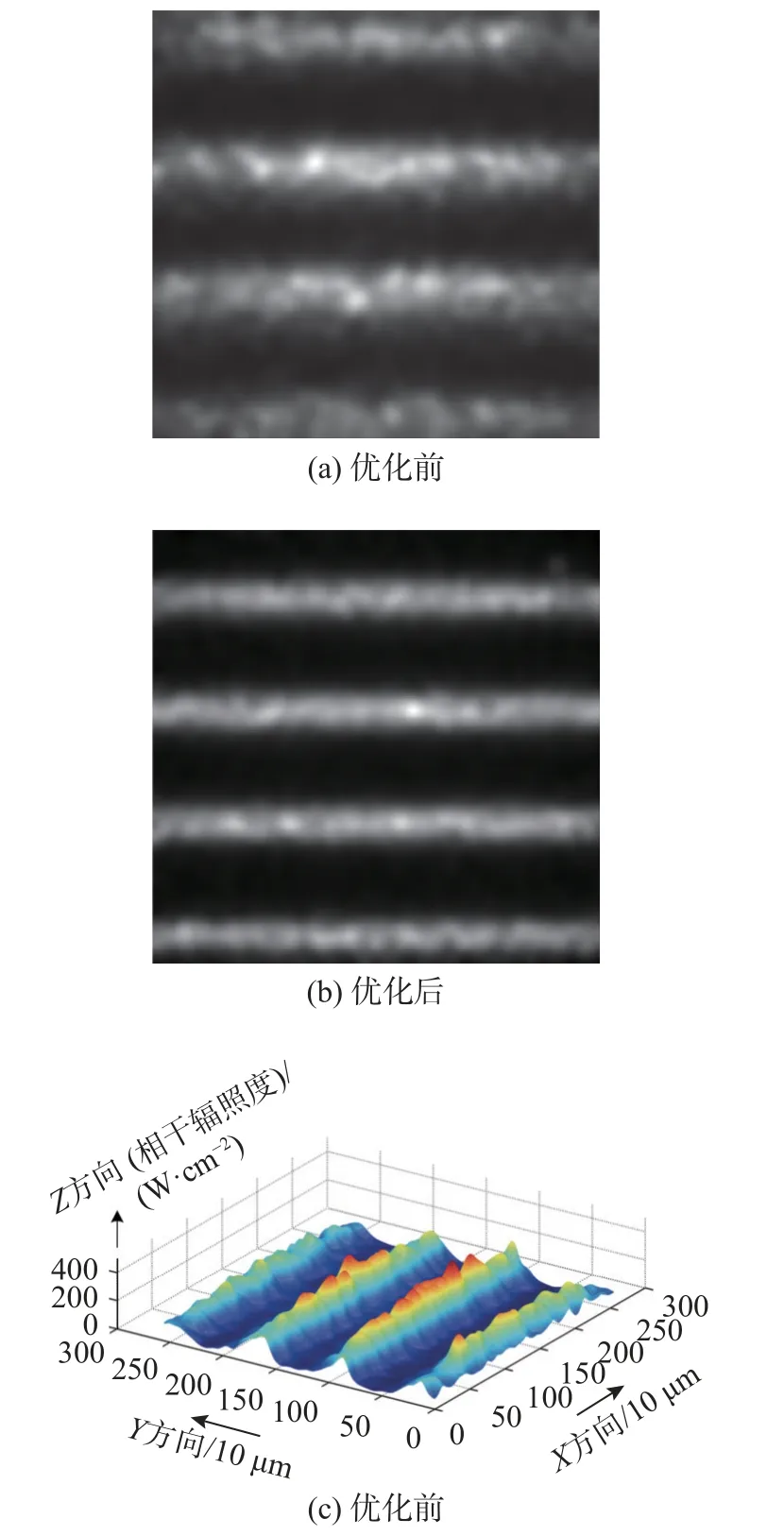

图9 误差分析优化前后的干涉条纹图Fig.9 Relationship between interference cavity length and stripe contrast
4 结论
误差分析优化后照明系统的干涉条纹可见度大幅度提升,像差得到了很好地控制。对比图9(c)和图9(d)可知,对于最后的干涉条纹成像来说,存在的像差极大地影响了干涉图中亮条纹的峰值分布,图9(c)中仅有两根亮条纹的能量达到了红色,且主要分布在视场中心区域;图9(d)中优化改进后的亮条纹能量分布则较为均匀,干涉图中亮条纹的宽度较细,更接近于能量分布完全一致的理想干涉条纹。
本文仿真实验中,选择与19.05 mm 干涉仪结合进行研究,最后的仿真结果表明,设计的照明系统在此干涉仪上能发挥作用。本研究中所有工作都是基于离轴照明技术原理和有关公式进行的,因此,使用其他参数的干涉仪或者其他波长的激光作为光源时,本文的工作内容依然具有参考意义,本文的照明系统对其他参数的干涉测量来说,也具有一定的参考意义。
经过对比,照明系统经误差分析改进后,得到的干涉图条纹对比度显著提升,改进前条纹对比度为92.3%,改进后可达到97.6%,条纹对比度提高了5.3%。经过误差分析优化后的照明系统,不仅对瑕疵引起的相干噪声有较强的抑制能力,还能保持条纹对比度大于95%。
猜你喜欢
红外技术(2022年11期)2022-11-25
九江学院学报(自然科学版)(2022年2期)2022-07-02
光子学报(2022年5期)2022-06-28
计测技术(2020年6期)2020-06-09
航天电子对抗(2019年4期)2019-06-02
航空兵器(2019年2期)2019-05-30
理科考试研究·初中(2017年5期)2018-03-07
中学生数理化·八年级物理人教版(2017年10期)2018-01-22
制导与引信(2017年3期)2017-11-02
光学精密工程(2016年1期)2016-11-07