化学发光火焰三维重建研究综述
2023-05-30 05:05冯晓鸥金熠翟超
实验流体力学 2023年2期
冯晓鸥,金熠,翟超
1. 中国科学技术大学 先进技术研究院,合肥 230031
2. 中国科学技术大学 工程与材料科学实验中心,合肥 230027
0 引 言
自人类文明诞生以来,火焰就与人们的生活密不可分。可以说,对火焰的不断认识是人类发展进程的一个缩影。火焰能够反映燃烧的本质,现代社会对火焰的利用越来越深入、广泛,从普通锅炉燃烧状态的监测到高超声速飞行器[1]超声速流场的测量,其核心问题都是快速准确地对燃烧流场进行检测并不断提高燃烧效率。火焰具有高温、湍流、非稳态的特性,并且对外界干扰极为敏感,这就决定了火焰重建技术的特殊性。
火焰重建技术依据原理可以分成3 类[2]。第一类是火焰电学重建(ECT)技术[3-7],利用火焰的电容或电阻分布特性进行重建。电容式传感器具有价格低廉、结构简单的特点。 Liu 等[3]利用ECT 技术描绘了火焰内容横截面,并分析了火焰电离效应对介电常数的影响。Waterfall 等[5]利用电容层析技术检测到了火焰到达的时间,并描述了燃烧过程的发展。目前电学重建实现的空间分辨率普遍较低,而Yang 等[7]在20 世纪90 年代就指出ECT 技术能为燃烧过程提供有意义的信息:基于火焰激光断层重建技术[8-11],以特定波长激光穿过火焰区域的信号值作为输入,重建火焰区域相关基团浓度分布。可调谐激光吸收光谱(TDLAS)技术、平面激光诱导荧光(PLIF)技术都是激光断层重建技术,能够以很高的时间分辨率或空间分辨率测量复杂的燃烧过程,但其系统相对复杂。而火焰化学发光重建技术[12-13]能直接利用火焰燃烧时整个火焰区域内的化学发光辐射信号进行重建。化学发光是燃烧过程中产生的某种激发态粒子在跃迁到相应基态时所导致的现象,因此不同波长的化学发光就对应着不同的激发态粒子,这些激发态粒子是燃烧过程的天然示踪粒子。火焰化学发光重建的研究最早开始于1988 年,Hertz 和Faris[14]开发了一套简单的火焰自由基发射层析成像实验装置,假设火焰关于燃烧器中心是旋转对称的,利用3 个投影角度和滤波反投影(FBP)算法对火焰燃烧进行简单二维重建,获得了稳定预混火焰中CH*基团浓度分布。虽然Hertz 和Faris只进行了二维测量,但他们开创了直接拍摄火焰投影并进行重建的先例。化学发光在火焰燃烧形态、反应放热率和燃烧当量比等燃烧特性诊断领域被广泛应用。但化学发光测量结果为火焰沿光程在空间的积分效果,不能反映火焰结构的空间分布[15]。
在过去的几十年间,火焰重建主要围绕一个点、一条线、一个面的火焰状态进行实验测量[16-18],虽然这些方法在帮助人们理解湍流燃烧方面发挥了重要的作用,但其本质上是二维测量,当火焰为非轴对称或火焰自身呈现出复杂的大尺度三维特征时,平面测量就受到了限制,不能很好地揭示出火焰的三维特征。
近年来,随着计算机能力的不断增强,越来越多的学者投身于火焰三维燃烧诊断的研究。通过记录并重构目标火焰的投影,目前已经出现了多种三维燃烧诊断手段。通过片激光扫描技术[18]与平面激光诱导荧光技术[19]、平面米氏散射信号技术[20]、平面激光诱导炽光信号技术[21]结合,能对燃烧过程中的不同粒子进行三维测量。这些方法可帮助研究人员获取燃烧过程中三维的火焰锋结构、温度分布等信息,但一般需要通过价格昂贵的高频激光器来实现,相关综述已经在文献[22]中详细介绍,这里不再赘述。
化学发光由于具有天然的示踪粒子,且不需要高功耗的激光器和复杂的光路,测量系统简单,对实验环境要求低,逐渐再次受到了学者的关注。Floyd[23]在总结前人工作的基础上结合自己的研究,利用化学发光直接拍摄火焰多角度的投影,并利用计算机断层成像(CT)技术对投影进行重构,获得了火焰的三维结构。Floyd[23]将该技术称为化学发光计算断层成像(Computed Tomography of Chemiluminescence, CTC)技术。与其他火焰测量技术不同,CTC 技术可以轻易实现火焰高时间分辨率测量,因此Floyd 也将该系统称为“传感器”。与其他技术相比,CTC 火焰测量更简单,更容易实现,可以提供总体积、点火量、表面积、亮度、均匀度、温度分布、烟尘浓度分布、粒子速度分布和自由基浓度等多项关键燃烧参数。
作为一种较为新型的测量技术,CTC 技术利用一系列投影图像重构出火焰的三维化学发光场,再结合化学发光强度与相关燃烧参数的关系,从而描述火焰结构。其系统构成简单,具有较高的空间和时间重构精度,能够较好地刻画出复杂三维瞬变火焰,因此在燃烧诊断中的应用越来越广泛。Kang等[24]实现了在1 kHz 的时间分辨率下重建湍流火焰; Yu 等[25]在4 kHz 条件下拍摄旋流火焰,成功重建出旋流火焰的螺旋模式和局部消光的过程;Ma等[26-27]在5 kHz 条件下拍摄到了喷气燃料航空实验室的燃烧情况,还在20 kHz 条件下,利用化学发光重建出了空腔火焰稳定器中从点火到稳定燃烧的过程。
为了更好地开展化学发光三维火焰重建技术的研究,本文在介绍CTC 技术原理的基础上,从成像模型、重构算法、实验方法和应用方向4 个方面介绍国内外CTC 技术的研究进展,分析CTC 仍然存在的问题和未来发展趋势。
1 CTC 技术原理
1.1 CT 技术原理
CT 技术[28]作为一项十分成熟的技术,在医学、工业等领域有着十分广泛的应用,其基本思路是“利用投影重构图像”。数学家Radon[29]从数学角度上,证明了可以由投影数据复制出原来的物体。投影数据Iqp可定义为单位体积标量值f(x,y,z)沿某一路径在空间上的累积量,即:
式中:下标p为某角度上的一个投影,q为一个投影角度,f(x,y,z)为在世界坐标系下(x,y,z)处的待测火焰流场信号值,V为该火焰流场在空间内的体积。在已知投影空间几何关系的前提下,可以利用所有角度上的投影重构出标量场,这就是CT 技术。
1.2 CTC 技术原理
CTC 技术是由CT 技术与化学发光测量技术结合而来,其原理在数学表达上与CT 技术相同,即从某一角度沿某一路径将化学发光标量场的累计值作为该角度上的一个投影,综合各角度上的全部投影,利用重构算法,得到重构图像。二者的区别在于:CT 技术中的投影值是X 射线穿透物体后的剩余量,而CTC 技术中的投影值是化学发光强度沿某一路径的累积量[16]。
图1[30]为CTC 成像原理示意图,将火焰区域视为离散网格,记为F(x,y,z),每个网格经过诸如CCD相机等成像系统后成像,成像的结果只与成像系统和像素的位置、方位有关。

图1 CTC 成像原理示意图[30]Fig. 1 CTC imaging principle diagram[30]
将成像平面上所形成的二维图像记为P(r,θ,φ),则P和F的关系可以表达为:
式中:P(r,θ,φ)是通过相机拍摄得到的投影数据。实验过程中,P(r,θ,φ)的数量受硬件和空间的限制,而为了获得高质量图像,体素的数量通常都很大,方程(2)有无穷多解,用常规的矩阵理论求解是不现实的,因此,一般采用迭代方法来求解。W为对应关系,根据成像模型的不同,W的含义有所区别。当采用线性成像模型时,W为像素沿待测火焰发出光线的线性累加;当采用点扩散函数模型时,W为点扩散函数,其值与成像系统和像素的位置、方位有关,可以由实验方法获得。F(x,y,z)是待重建区域离散化的结果。
利用CCD 相机等实验设备获得一系列火焰投影后,可以由重构算法重构出待测火焰流场的三维信息。重构算法一般包括代数迭代(ART)[31]、同时代数重建(SART)[32]、同步迭代代数重构(SIRT)[33]、最大似然最大期望值(MLEM[34])算法等,经典的ART 算法迭代如式(3)所示。通常,为了获得高质量的重建图像,初值在理论上须尽可能地逼近原始图像。在没有先验条件的情况下,一般取投影数据的平均值。
式中:k为迭代次数;i为图像形成的投影矩阵索引;Wi为待测物体分割的所有网格在像素i上的贡献值;λ为松弛因子,是一个经验参数,实际重建中由迭代次数要求和测量时的噪声共同决定。
2 成像模型
相机的成像模型主要包括线性成像模型和点扩散函数成像模型两类。线性成像模型主要包括世界坐标系、摄像机坐标系、图像坐标系和像素坐标系4 个坐标系之间的相互转换关系。点扩散函数成像模型是在线性成像模型的基础上,考虑了镜头的切向畸变、镜像畸变和不同体素在相机芯片上的重叠,是一种更为精确的成像模型。对于CTC 技术来讲,更精确的成像模型意味着更精确的重建模型。本节将对线性成像模型和点扩散函数成像模型进行介绍。
2.1 线性成像模型
如前所述,CTC 技术在数学表达上与CT 技术是相同的,唯一不同的是CTC 技术所获投影是火焰发光场的累积,因此,现有CTC 技术的主要成像模型与CT 技术一样是线性成像模型。也就是说,某一个体素所发出的光只能透射到探测器相对应的几何位置上,而不会对其他位置的探测单元产生影响,发光单元格在成像平面上所成的像线性叠加。
早期CTC 技术都采用这种线性成像模型[35-36]。2009 年,Floyd[23]在其博士论文中,详细介绍了线性成像模型原理(图2),将经典ART 算法二维全系数矩阵的求法拓展到三维,并利用ART 算法实现了湍流火焰矩阵的重建,达到了较高的精度。之后,其他学者也逐渐接纳了该模型,并进行了大量后续研究。

图2 线性模型原理图[23]Fig. 2 Principle of Linear Model[23]
2.2 点扩散函数成像模型
线性成像模型被广泛应用在CTC 研究工作中,取得了不错的效果,但其并未考虑到相机成像造成畸变的影响,存在一定的缺陷。与CT 技术不同,CTC 技术是利用相机等设备对物体自发光进行拍摄,相同物体在不同焦距、位置时,在像平面上所成的像是不同的。点扩散函数(PSF)描述了一个成像系统对一个点光源的响应,在大多数情况下,可认为点扩散函数是拍摄待测物体所得到图像中存在光源扩展的区块。简单来说,点扩散函数考虑了实际的成像情况,比线性成像模型更精确,但会导致计算量大大增加。
Zhou 等[37]提出通过获取CCD 相机在不同焦距下的图像寻找PSF 的傅里叶变换,以此确定相应的散焦点扩散函数。Zhou 等在各个焦距下拍摄图像(图3),通过去除图像离焦状态下的PSF,得到重聚焦的图像,在断层重建中获得了更精确的图像。在实际重建过程中, Zhou 等通过分层重建获得蜡烛火焰的结构分布,并通过灰度信息与温度之间的关系得到了蜡烛火焰的温度场,结果与实际值吻合较好。

图3 不同焦距下的图像[37]Fig. 3 Images under different focal lengths[37]
Cai[38]和Ma[39]等使用点扩散函数成像模型,通过相机与光纤内窥镜结合的方式,对湍流火焰实现了重建。Ito 等[40-41]提出了点扩散函数成像模型的测量方法。Wang[42]等基于点扩散函数成像模型,提出了光收集理论。点扩散函数成像模型不受相机参数的限制,计算效率较高。
虽然点扩散函数成像模型的标定过程在客观上比较复杂,但是在一次标定完成后可以重复使用。使用点扩散函数成像模型进行重建,能够提供更加准确的信息,有助于更好地了解燃烧机理。
3 重构算法
为了降低硬件成本,需要尽可能地减少投影角度数量,同时保证重建分辨率和重构精度,因此选用和改进合适的算法来提高重建精度是CTC 技术发展的一项重要内容。本节将介绍相关的重构算法和发展进程。
在经典CT 技术中,在X 射线穿过物体后衰减、接收器得到衰减后的图像后,就可以使用相应的重构算法进行重构计算。CTC 技术中,图像是发光单元的线性叠加,其算法迭代过程与CT 技术相同。
Cai 等[43]通过仿真,总结了反演算法的各类实验条件对重建的影响。Yu 等[44]详细介绍了各算法的基本思想和迭代公式,提出松弛因子的改变会导致半收敛情况发生在不同的迭代次数。张顺利等[45-47]在ART 算法改进方面做了大量工作,讨论了松弛因子对重建过程的影响,并且使用平均值法、改进权系数矩阵计算法等提高了ART 算法重建速度。
在早期的CTC 三维重建中,往往使用叠加二维重建切片的方式构建三维火焰模型。Cai 等[48]提出在断层扫描过程中,使用处理后非黑即白的图像能够减少运算量,使重建所需的投影角度数量减少;Li 等[49]在此基础上使用退火模拟(SA)算法进行求解,结果表明利用局部搜索技术能够提高重建的速度,但会减弱火焰的细致性。上述方法能够解决火焰三维重建问题,但同样存在很多缺陷:断层扫描重建方法限制了相机摆放的位置,所有相机都只能固定于一个水平面上,不能有效得到火焰的所有信息,限制了重建的精度。因此,Floyd[23]提出了三维体重建火焰模型,进而获得三维权系数矩阵的求解方法,并且利用经典ART 算法,在10 个投影角度下重建了湍流火焰矩阵,取得了较好的重建精度。Goyal等[50]提出了一种基于熵最大化(MENT)并结合了熵最大化算法的直接三维重建算法,该算法比二维MENT 算法的误差降低了约80%,计算时间减少了75%。
为进一步提高计算精度,减少投影角度数量。Wang 等[51]基于Mojette 变换理论发现:角限制情况下,网格数量、投影角度数量和投影采样率满足特定构造条件时,可以在有限的角范围内重建出测试对象。Gilabert[52]和Hossain[53]等将CT 技术中广泛使用的滤波反投影(FBP)算法与ART 算法相结合,提出了LFBP–ART 和LFBP–SART 两种算法,并与其他算法进行了比较,证明了LFBP–ART 和LFBP–SART 算法可以提高重构精度。Liu 等[54]提出了一种基于光线追踪的成像模型,该模型可以模拟受限视场下的投影,进一步减少投影角度数量。
上述算法都是基于线性成像模型的。Cai 等[30]考虑火焰的先验信息,明确提出在CTC 成像过程中,使用点扩散函数成像模型能够得到更符合实际的火焰模型。他们利用点扩散函数成像模型进行火焰三维重构,在ART 算法的基础上,结合最小化技术,形成了一种新的混合算法;同时,通过正则化灵活地合并先验信息,提高了重建的精度。如图4[30]所示,在相同条件下使用不同算法进行重建,引入正则化的混合算法(RHybrid)重建精度更高。Li 等[36]对CTC 技术的能力和局限性做了分析,给出了对三维测量最重要的几个参数的基本关系,如空间分辨率、测量体积和信号水平。他们指出空间分辨率的极限既取决于线性代数极限,又取决于傅里叶切片定理的极限,为后续的定量测量研究提供了帮助。Wang 等[55]通过实验测得了点扩散函数,并在Cai[56-57]等的基础上,提出了一种点扩散函数的简化模型—反褶积模型。与清晰成像模型和离焦成像模型相比,反褶积模型有助于提高空间分辨率。

图4 不同算法重建误差比较[30]Fig. 4 Comparison of reconstruction errors of different algorithms[30]
镜头失真和偏斜会不可避免地将误差引入权重矩阵,从而导致测量误差。Yu 等[58]于2017 年提出了一种改进的点扩散函数成像模型,该模型结合了相机的缺陷,将CT 技术的像素误差减小到1 像素内。2019 年,Yu 等[59]基于Beer–Lambert 定律,将火焰的自吸收问题引入了CTC 技术中,进一步减小了成像过程中信号衰减的影响。表1 总结了CTC 重构算法的发展过程。总的来说,从最初的二维切片叠加发展为三维重建,从最初的线性成像模型到考虑实际成像后的点扩散函数模型,重建算法的发展使得重构的火焰越来越精细。

表1 CTC 重构算法的发展Table 1 Development of CTC reconstruction algorithms
综上所述,三维重建有助于理解复杂燃烧现象背后的机制,一个优秀的算法能够提供良好的时间分辨率和空间分辨率。从最初以线性成像模型为基础的层析重建到如今以点扩散函数成像模型为基础的三维重建,重建算法的不断更新使得火焰的重建精度越来越高。总的来说,未来对算法的改进在于减少投影数量、节约硬件成本、提高重建速度这3 个方向。
4 实验方法
CTC 技术是一项与实验紧密结合的技术,其最终目的是实现火焰的三维重构。由重构公式可知,CTC 技术需要尽可能多地获得火焰投影,但火焰测量受到实际条件和硬件成本的限制,大部分情况下无法获得像医学CT 那么多的投影。因此,CTC 技术的研究人员发展了多种实验方法来降低成本、提高精度。目前所采用的投影获取方法可以分为以下3 类:一是直接利用相机对火焰进行拍摄,获取多角度火焰投影;二是利用相机加反射镜的组合,减少相机数量;三是利用光纤束拍摄不同角度的火焰,经过光纤耦合投影再射入相机进行成像。
4.1 直接相机拍摄法
由于实验布置简单、实验设备的获取相对容易,许多学者选择利用相机直接对火焰进行拍摄的方法进行火焰重建。
2005 年,Ishino 等[60]利用胶片相机,研制了一套包含40 个投影角度的CTC 装置,利用MLEM 算法,获得了丙烷–空气预混湍流火焰的化学发光瞬时三维分布,完成了火焰峰结构及传播速度检测,发现火焰前锋是厚度为0.6 mm 的薄褶皱发光区域。由于投影角度较多,该系统具有较高的分辨率,但是由于胶片相机的局限性,其数据处理过程十分烦琐,重构速度和采样率较低。
随着CCD 相机的发展与普及,利用CTC 技术进行较高精度、高采样率的相关研究越来越多。Bheemul 等[61]利用3 台单色CCD 相机,从3 个不同角度同时捕捉火焰的二维图像,对火焰体积、表面积等几何参数进行了测量。万明罡[62]设计了一套包括ICCD 相机、手动升降台、磁栅尺位移传感器、滑车和圆弧运动导轨的拍摄系统,如图5 所示。他在0°~180°内,利用1 台ICCD 相机从多个角度对美克灯燃烧进行重建,比较了投影角度和数量对重构结果的影响,并获得了美克灯火焰中CH*的空间分布情况。Liu 等[63]利用ICCD 相机和窄带滤波片捕获低旋流火焰中的OH*和CH*,研究了不同当量比和旋流数下OH*和CH*的发光特性。
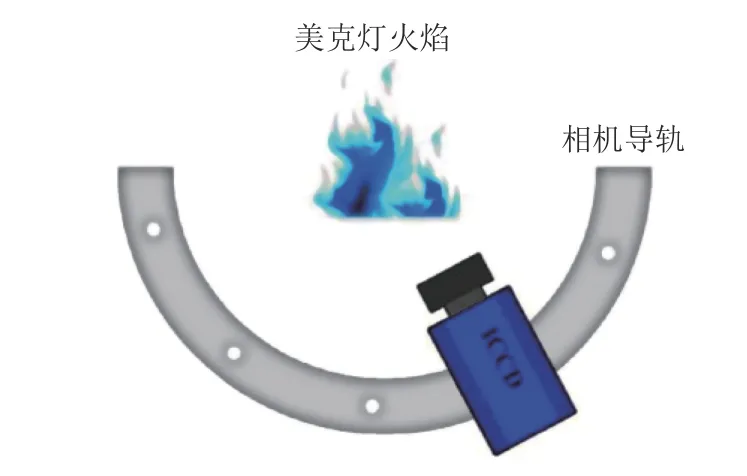
图5 ICCD 相机及导轨[62]Fig. 5 ICCD camera and guide rail[62]
徐萌[64]设计了1 套包含8 个角度的火焰图像采集系统。该系统在火焰周围布置8 个工业级RGB 相机,每台相机通过USB 数据线与电脑主机相连,并以25 帧/s 的速率实时传送采集动态火焰图像,通过双色法获得了火焰的温度场分布。Li 等[65]使用5 台高速相机,从5 个不同角度同时记录湍流喷射火焰,首次展示了在一个相当大的测量体积下,实现千赫兹下的瞬时3D 燃烧成像。Ma 等[66]使用6 台相机以5 kHz 的频率从不同方向同时记录目标火焰的化学发光实时图像,并对火焰进行重构。
综上所述,从最初的胶片相机到CCD 相机,再到高速相机,相机性能的提升使得火焰重建精度和时间分辨率越来越高。使用1 台相机结合导轨的拍摄模式能够在很大程度上节省硬件成本,但是,该方法只适用于稳态火焰。对于湍流火焰,其不稳定性导致了使用多个相机进行同步拍摄的需求。因此,在实验开始前,须对各个相机的拍摄一致性进行校准。
4.2 相机 + 反射镜法
直接相机拍摄法受到硬件条件的限制,拍摄角度一般较少或只能拍摄稳态火焰,其应用受到了很大的限制。如果选择多台相机进行拍摄,则硬件成本将会大幅上升,因此很多研究人员采取了结合反射镜的方法来减少相机数量,提高实验效率。
Floyd 等[67-68]研制了包含10 个投影角度的CTC系统,用于湍流对冲射流火焰的检测,使用反射镜和光电耦合探测器实现多角度的火焰拍摄。利用5 台均匀分布在半个圆周的相机,通过光线追踪法严格确定了相机和反射镜之间的空间位置关系,5 台相机通过电子快门同时触发,获取10 个不同角度的火焰图像。对得到的图像采用ART 算法重构,获得了足够精细的对冲火焰和矩阵火焰结构,空间分辨率达到0.5 mm。Hossain 等[69]设计了采用3 台RGB 相机和3 组反射镜的实验装置对三维燃气、燃煤火焰进行拍摄,得到了高相关度和小平均误差的三维火焰投影,并结合双色辐射测温法,利用单频CCD 相机对燃烧火焰的温度场进行了测量,如图6 所示。实验结果表明,该系统和算法获得的信息可直接用于燃烧火焰三维几何、发光和流体动力学特性的量化。

图6 3 相机6 投影系统[69]Fig. 6 Cameras and 6 projection systems[69]
Anikin 等[70-71]使用10 台开普勒望远镜连接1 台ICCD 相机进行层析重建,在100 µs 曝光时间下获得合理时间、空间分辨率的瞬时OH*分布,并将该技术应用于湍流火焰。
相机+反射镜法在一定程度上减少了相机数量,但是仍然存在以下3 个缺陷:一是减少的相机数量有限,只能降低一半的相机数量;二是反射镜会降低拍摄精度;三是无法精确获得反射镜角度,虽然Floyd[23]证明了反射镜角度误差不超过2°时,重建误差可以接受,但这仍然会对获得精细火焰结构造成影响。
4.3 相机 + 光线内窥镜法
随着光纤应用的普及,相机+光纤内窥镜法应运而生。光线内窥镜的成本相对较低,且能够提供足够的拍摄空间,获取更完整的火焰信息。同时,光纤内窥镜的体积较小,这意味着它能获得更多的投影角度和更精确的重建投影。
如Hossain 等[72-74]设计了基于8 股光导纤维和2 台光电耦合探测器的燃烧诊断系统。8 股光导纤维等间距分布在157.5°内,每股光导纤维由3 万根独立光导纤维组成,每4 股光纤经过一个纤维耦合透镜,再进入光电耦合探测器相机。将相机拍摄的任意一张火焰图片分成2 行2 列等大的4 个子区域,每个区域都对应了一个特定方向上的火焰子图片。2 台相机通过控制软件控制拍摄。为了验证不同拍摄角度的光敏感一致性,将可调LED 灯放置在中心,对比8 张拍摄图像的平均灰度,结果显示角度引起的灰度差异不超过2%。Kang[75]利用光纤内窥镜同时收集目标火焰不同角度的投影,在此基础上进行三维层析重建,获得三维火焰测量值。Liu 等[76]在获得了光纤内窥镜分辨率的基础上,搭建了一套三维火焰拍摄系统。该系统包括3 台CMOS 相机和9 组光纤内窥镜,光纤1~4 由相机1 进行拍摄,光纤5~8 由相机2 进行拍摄,光纤9 由相机3 进行拍摄,采样频率均为1 kHz。
Wang 等[77]利用光纤搭设了一套单相机火焰拍摄系统,如图7 所示。通过定制光纤获取9 个方向的投影,利用视觉标定方法确定光纤的准确位置,所有光纤获得的图像实时传输到1 台相机里,相机曝光时间为100 us。Wang 等通过该系统,拍摄了10 个呈环状排列的CH4扩散火焰并通过ART 算法进行了重构。在这之后,Wang 等[78]还利用这套系统结合高精度的黑铁炉和LED 背板对所有像素之间的不均匀系数、像素在不同照明下的非线性系数、光纤的不同衰减系数进行了标定,实现了三维定量测量。Ruan[79]和Zhao[80]等通过定制的光纤束,同时将9 个投影传送到单个相机上,成功地在有限的角度下提取了火焰相关结构,火焰数、火焰的环形、环的内外径等参数都很好地匹配了火焰的物理结构,结果表明使用单相机也可以很好地实现三维火焰重建,使CTC 技术更加简单、经济。
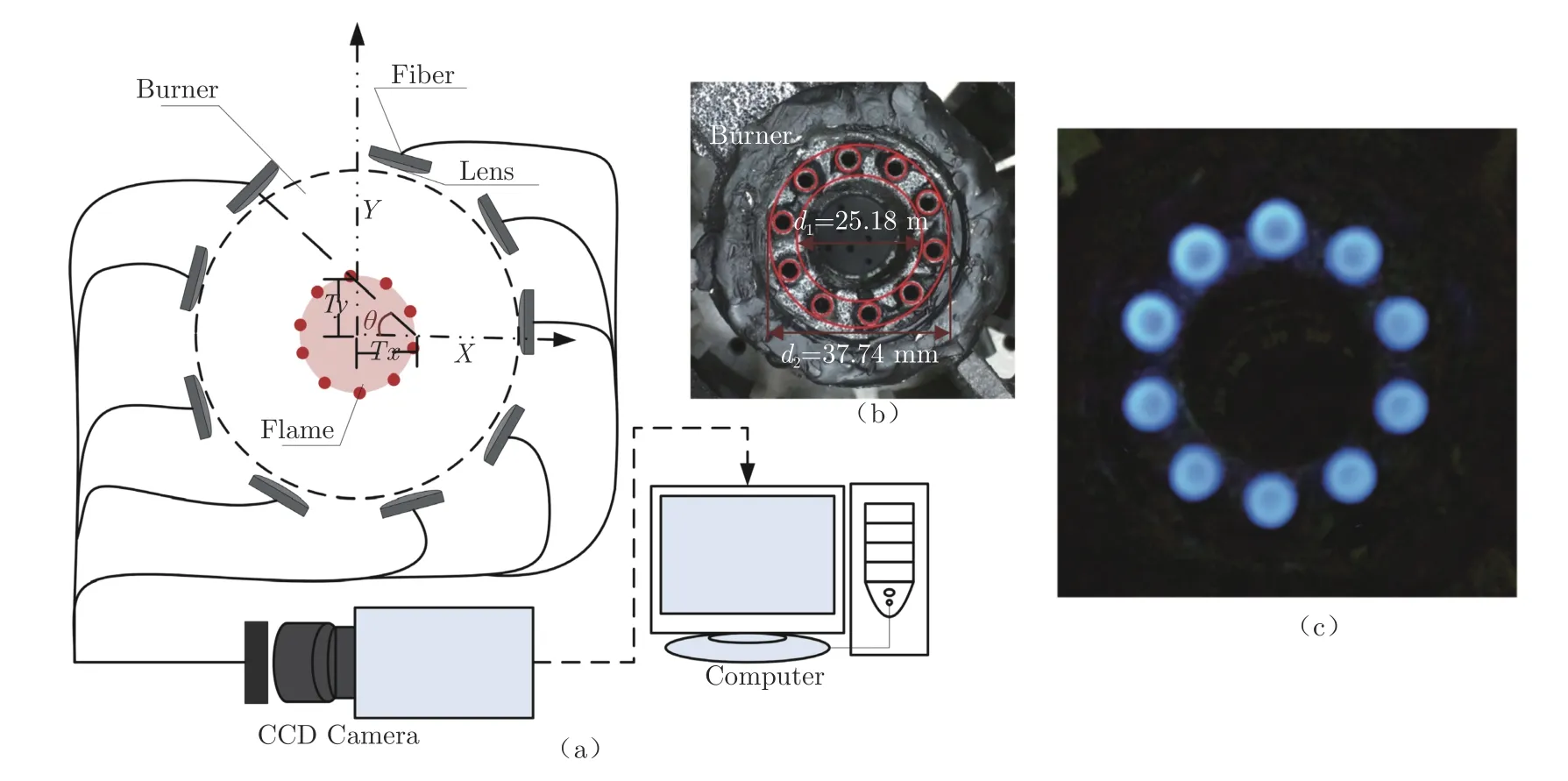
图7 单相机结合9 个光线内窥镜火焰拍摄系统示意图[77]Fig. 7 Single camera combined with 9 light endoscope flame shooting system[77]
光纤内窥镜系统虽然大大减少了相机数量,但是数量巨大的光纤系统同样导致了硬件成本的增加,且光纤束会造成极大的光信号损失,需要认真评价所拍摄图像的信噪比。Kang 等[81]对多个光纤内窥镜的位置进行精确标定,提高了重建精度。Bolan等[82]利用1 台全光学相机结合3D 反褶积技术,提供了一种新的三维可视化方法。这一方法由于只使用了单相机,省去了多台相机或光纤内窥镜的标定过程,大大简化了实验装置。目前,全光学相机结合3D 及反褶积技术仍然在起步阶段。
表2 列举了以上3 类实验方法的优缺点,在具体的实验过程中,需要结合实际条件选择合适的实验方法。

表2 不同实验方法的优缺点Table 2 Advantages and disadvantages of different experimental methods
5 应用方向
在介绍了实验方法和算法实现过程后,下面将对CTC 技术的应用方向进行探讨。CTC 技术作为一种非入侵式的检测方式,相对于传统的接触式测量方法,能够在不干扰燃烧现场的情况下用于一些较为复杂的试验现场。尤其是近年来,随着理论的不断完善和硬件设备的不断发展,提高采样频率、获取实时湍流火焰重建数据受到了科研人员的广泛关注。本节将从火焰工业现场检测、燃气轮机状态检测和燃烧演变预测3 个方面来介绍CTC 技术的应用方向。
5.1 火焰工业现场检测
基于CCD 相机的二维测量[83]已被用于工业规模的燃烧检测设施上,然而,化学发光火焰三维形态测量在实际生产中的应用仍是一个难题。为此,许多学者开展了相关研究。周怀春等[84]使用CCD 相机拍摄200 MW 的电站锅炉炉膛内部,构建了炉膛二维燃烧工况的变化,并在此基础上提出了一种炉膛三维燃烧工况的检测方法。Yan[12,85]等分别利用CCD 相机捕捉到了单一波长的火焰投影和彩色图像,利用层析重建的方法,构建火焰三维形态。然而,层析重建并不能反映实际的火焰形态。为此, Liu 等[86]利用4 台CCD 相机,模拟实际工业现场信噪比较低的环境,采用直接三维重建的方法,重建出了三维非稳态火焰。徐萌[64]设计了一套8 个角度的火焰图像采集系统,在火焰的一侧布置8 个工业级彩色CCD 相机,每2 个摄像头间隔22.5°,通过拍摄火焰在8 个等角方向下的二维图片,利用LFBP–SART 算法,对动态火焰进行了拍摄和重建。在实际的工业检测中,通常将化学发光三维重建技术与比色测温法结合,进而得到三维温度场的信息,图8[64]为徐萌通过比色测温法测得火焰各个面上的温度图像,这将有效扩展CTC 技术在工业检测中的应用。

图8 8 个截面温度场三维重建效果[64]Fig. 8 Three-dimensional reconstruction of the temperature field of 8 sections[64]
5.2 燃气轮机状态检测
自工业革命以来,燃气轮机得到了广泛的应用。随着近年来对环保的日益重视,提高燃烧效率、减少污染排放成为一个重要的课题。CTC 技术作为一种非入侵式的检测方法,能够在不干扰燃烧过程的前提下重建燃气轮机内部的火焰结构,有助于分析燃烧状态,帮助工程师提高燃气轮机的燃烧效率。
Timmerman 等[87]利用层析重建方法,通过重建OH*来检测热释放率并用于氮氧化物生成的定位。Samarasinghe 等[88-89]在实验室用多喷嘴的复杂火焰模拟实际燃气轮机的燃烧室,利用高速相机进行多角度拍摄,重建出了CH*化学发光的三维分布。Wang 等[77]用1 台相机和定制光纤束,从9 个角度进行拍摄并重建出三维火焰模型,提高了该方法的经济性。Ruan 等[79]利用相机 + 反射镜法重建出了具有动态特征的三维火焰,为解决贫燃料燃气轮机发动机中的周期性燃烧振荡提供了帮助。
除了一般的燃气轮机,CTC 技术同样适用于高超声速环境中的超燃冲压发动机。Ma 等[26]在总燃料流量为0.002 kg/s、总当量比为0.3 的航空试验台中,成功重建出了5 kHz 下的瞬时三维火焰,清楚地捕捉到了燃烧时的湍流火焰瞬时三维结构、尺寸和范围。 Ma 等[39]还将采样频率提高到20 kHz,采用8 组光纤和2 台CCD 相机对超声速燃烧室进行拍摄,结果如图9 所示。该系统清楚地拍摄到了在马赫数为2 条件下点火时火花的变化情况,对超燃冲压发动机点火过程的研究和点火机理的分析具有重要意义。
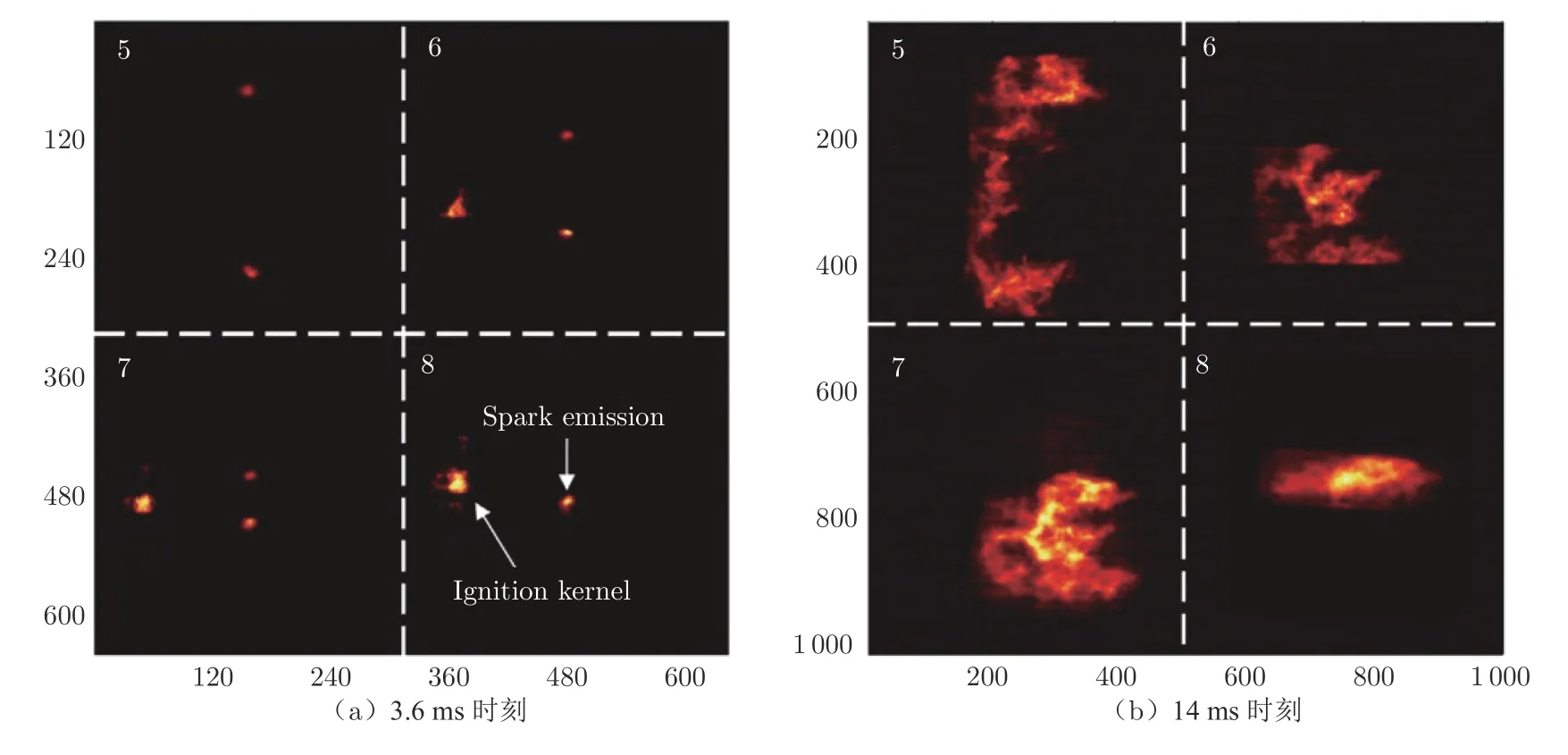
图9 两个时刻超声速燃烧室中的火焰投影图[39]Fig. 9 Flame projection diagrams in the supersonic combustion chamber at two moments[39]
5.3 燃烧演变预测
燃烧火焰在能源、化工、冶金及航空航天等领域都占有重要地位,火焰燃烧状态直接关系到各项活动的进行,如果能够有效预测火焰状态,就能让各行各业的生产者更好地利用火焰。为此,不少学者都进行了这方面的研究。
随着计算性能的不断提升,计算流体力学(CFD)取得了长足的进步,但即使是目前最先进的CFD 技术如直接数值模拟(DNS),也仍无法实现火焰演化过程的在线预测。其原因有二:一是CFD 模拟需要求解大量的方程;二是CFD 建模对边界条件高度敏感,难以在边界条件不好定义的实际条件中应用,有关论述参见文献[90]。
人工智能的兴起为燃烧演变预测提供了新的途径。Wang 等[91]将CCD 相机捕捉到的图像传输到深度神经网络(DNN)或卷积神经网络(CNN)中,以预测燃烧状态和热释放率,使得平均精度在1 ms 内达到99.9%。Pál 等[92]使用人工神经网络(ANN)和彩色相机预测了3 MW 锅炉中的火焰强度。Yu[93]和Huang[94]等提出了一种基于机器学习的高效反演方法,可以从之前的重建中提取有用的信息并构建高效的神经网络作为替代模型来快速预测。Fukami 等[95-96]基于受超分辨率和中间技术启发的监督机器学习技术,提出了一种新的数据重建方法。Pan 等[97]提出了一种多权重编码重建网络的方法,从不同火焰的多投影中同时重建3D 火焰发光。
神经网络的学习往往需要大量的数据, Huang等[98]利用1 台高速相机和1 根多探头的内窥镜在10 s 内采集10000 个样本数据,利用前8000 个样本数据训练CNN−LSTM 预测模型。如图10[98]所示,先利用CNN 提取图像中的火焰特征,再利用LSTM来预测火焰特征的演化,最后使用预测得到的火焰特征重建火焰的三维结构。该系统每次对三维结构的预测仅耗时约2 ms,计算效率极高。

图10 CNN−LSTM 三维火焰预测模型[98]Fig. 10 CNN−LSTM Three-dimensional Flame Prediction Model[98]
与传统的CFD 方法相比,深度学习与化学发光相结合的方法不需要求解复杂的方程,计算效率更高,是一项十分具有前景的技术。然而,深度学习的模型需要大量数据集进行训练,且训练得到的模型只适用于与被训练火焰特征相近的火焰,这使得训练得到的模型不具有普适性。
6 总结与展望
CTC 技术的发展可以分为以下3 个阶段:第一阶段是利用胶片相机实现简单二维重建;第二阶段是随着CCD 相机的普及发展和硬件成本的降低,很多研究人员利用多个CCD 相机实现了三维火焰重建,并在提高分辨率、降低成本方面做了很多研究工作;第三个阶段是不断提高CTC 技术时间分辨率,以满足超声速燃烧等特殊火焰的测量,实现4D重建。
虽然基于CTC 技术的三维火焰重建技术已经取得了长足的发展,但是仍需从以下几个方面进行改进:
1)降低硬件成本。理论研究和实验都表明,增加投影角度数量可以提高CTC 火焰重建精度,但与此同时会带来硬件设备成本的增加,因此,利用反射镜、光纤等实验手段减少相机数量,或者改进重构算法以减少重建所需投影角度数量将长期是CTC 火焰重建技术的一个研究方向。
2)重构算法。选择合适的重构算法可以减少重构所需的投影角度数量。虽然研究证明,算法选择合适时,6 个投影角度的重建精度即可达到99%,但是这种算法所需的重建时间较长,不利于实时测量。因此,减少投影角度数量和重构时间仍然是CTC 火焰重建技术研究的重中之重。除了不断提高现有算法的计算效率,Yu 等[99]提出的基于POD 降维的重建方法大大减少了待确定变量的数量,且重建精度与现有ART 算法一致,这可能是未来减少时间成本的一种方式。
3)实际应用。CTC 火焰重建技术的现有研究都是在实验室环境中进行的。在实际应用中,外部环境干扰、场地限制等因素将大大影响实验数据的准确性及其获取,因此有必要提高CTC 技术的鲁棒性,使其能够应用于实际测量。目前,Cheng 等[100]尝试了复杂外部条件下的CTC 火焰重建工作。
猜你喜欢
音乐天地(音乐创作版)(2022年1期)2022-04-26
数学物理学报(2021年1期)2021-03-29
学苑创造·A版(2021年2期)2021-03-11
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
动漫星空(兴趣百科)(2019年5期)2019-05-11
学生天地(2019年15期)2019-05-05
学与玩(2017年6期)2017-02-16
分析测试学报(2015年8期)2016-01-13
分析测试学报(2015年6期)2016-01-13