基于WiFi-蓝牙混合定位技术的震后压埋人员手机定位方法
2023-05-16 05:33彭伟豪肖东升
自然灾害学报 2023年2期
彭伟豪,肖东升,3
(1. 西南石油大学 土木工程与测绘学院,四川 成都 610500; 2. 西南石油大学 测绘遥感地理信息防灾应急研究中心,四川 成都 610500; 3. 成都高新减灾研究所,四川 成都 610041)
0 引言
我国是地震最频繁、地震灾害最严重的国家之一[1],目前震后压埋人员的搜救主要依靠接触式和非接触式的生命探测技术[2],这类技术存在成本高、效率低、搜救范围小且受环境影响大等缺点,在一定程度上影响了震后救援工作的开展。随着手机等智能设备的普及,对智能设备的室内定位可间接实现对压埋人员的定位,将基于压埋人员智能设备的定位看作是一种特殊环境下的静态室内定位,射频信号定位技术、传感器定位技术和多源融合定位方法是目前主要的3类室内定位技术[3-4]。目前基于智能设备的震后压埋人员定位还处于起步阶段,XIA等[5]从数量、位置、变化率、震中距等几个方面分析了手机定位信号数据在地震应急救援工作中的可行性,为应急救援决策提供了科学依据。刘小洪[6]探讨了WiFi信号接收机的位置分布方式、网格密度以及与压埋手机相对位置对震后压埋定位精度的影响。洪利等[7]基于智能手机WiFi信号设计了一种地震灾害中面向生命探测的无线定位系统。罗尚等[8]提出一种针对未知震后压埋环境的快速定位算法,有效地改善了定位精度。肖东升等[9]通过模拟3种典型建筑物倒塌压埋空间,建立不同场景下的最优无线信道模型,提高了压埋人员的搜救效率。
WiFi和蓝牙室内定位技术都可以通过信号接收强度(received signal strength indication, RSSI)测距定位技术实现定位[10],非视距、多路径、干扰多变等因素会在一定程度上影响RSSI在室内环境中的传输[11],在震后压埋环境中这些影响将变得更加突出,因此需要构建适用于不同压埋环境的无线信号衰减模型来提高定位精度[12]。为降低RSSI的随机性引起的测距误差,需要对接收到的RSSI数据进行滤波预处理。常用的滤波方法有均值滤波[13]、中值滤波[14]、递推平均滤波[15]、高斯滤波[16]、狄克逊检验法滤波[17]、卡尔曼滤波[18]等。基于RSSI测距的定位算法包括最小二乘算法、三角质心算法等[19],在此基础上也发展出定位精度更高的加权质心定位算法[20]、Chan算法[21]和加权三维质心定位算法[22]等。
文中提出的基于WiFi-蓝牙混合定位技术的震后压埋人员手机定位方法,模拟震后压埋环境,利用混合滤波方法分别对WiFi和蓝牙RSSI数据进行预处理,构建基于震后压埋环境的无线信号衰减模型,采用改进的加权质心定位算法分别解算WiFi和蓝牙定位结果。通过评价WiFi和蓝牙定位结果的可信性,根据评估结果选取最优值实现定位结果的混合。
1 WiFi-蓝牙混合定位技术
1.1 RSSI数据滤波处理
由于环境等影响因素,同一个节点接收到的多个RSSI值中必然存在由误差引起的小概率事件,通过高斯模型筛选出满足一定概率要求的RSSI值作为有效值,能够有效地减少小概率、大干扰误差对整体测量数据的影响,提高定位精度。高斯滤波模型解决了RSSI在传输环境中易受干扰、稳定性差等问题,但对阴影效应、能量反射等长时间干扰问题处理效果欠佳,使得定位的时效性受到一定影响[23]。
卡尔曼滤波的基本思想[18]是:利用信号和噪声的状态空间模型,通过对前一时刻的估计和对当前时刻的观测更新状态变量的估计,以最小均方误差为最佳估计准则,根据系统方程和由最小均方误差建立的观测方程估计待处理的信号。卡尔曼滤波能在一定程度上减小由于噪声叠加引起的RSSI观测值偏离,经过卡尔曼滤波处理后的RSSI值稳定性更好,对高斯分布的随机过程信号具有较好的滤波效果。
结合高斯滤波和卡尔曼滤波的优缺点,文中提出的混合滤波算法首先对原始RSSI数据进行高斯滤波,得到RSSI(k)∈(μ-σ,μ+σ),然后利用卡尔曼滤波消除高斯滤波后的RSSI值的随机噪声得到RSSI(i),对这些RSSI值进行中值滤波得到RSSI(a);同样的,对这些RSSI值进行均值滤波得到RSSI(b),则:
RSSI(i)=Kalman[Gauss(RSSI(1),RSSI(2),…,RSSI(k))]i=1,2,…,k
(1)
RSSI(a)=Med{RSSI(1),RSSI(2),…,RSSI(k)}
(2)
(3)
最后对RSSI(a)和RSSI(b)做算术平均处理,即:
(4)
文中提出的混合滤波算法能够有效地滤除偏离真值的数据,使RSSI值输出更加平滑,更接近于真值,提高测距的精度,从而提高定位的精度,更好地服务于室内定位。
1.2 无线信号衰减模型
无线信号传播路径损耗模型主要包括自由空间传播模型、衰减因子模型、对数距离路径损耗模型等[24]。信道衰落无论是大尺度衰落还是小尺度衰落其特性服从对数正态分布,因此对数距离路径损耗模型通常用于RSSI距离测量中,可将其表示为:
PL(d)=PL(d0)-10nlg(d/d0)+φ
(5)
式中:PL(d)为距发射信号的已知点d处的待定位点的接收信号强度;PL(d0)为距发射信号的已知点d0处的参考点的接收信号强度,通常d0取1 m;n是环境因子,与定位环境有关,表明了路径损耗随距离的衰减速率,具体取值将在测距前进行相关实验获取经验值;φ为衰减因子,与传播距离无关,通常可忽略不计。
发射信号与接收信号强度之差,即为信号强度损耗值,如式(6)所示:
P=P0-RSSI(d)
(6)
式中:P0为发射信号强度;RSSI(d)为d处的接收信号强度。
由式(5)、式(6)可以得出对数路径损耗模型,见式(7):
RSSI(d)=-10nlgd+A
(7)
1.3 改进的加权质心定位算法
不论采用哪种测距模型,接收信号强度RSSI与真实值之间总是存在一定误差,从而导致测距结果存在一定误差,因为复杂的室内环境尤其是震后压埋环境的未知性,解算出的传感器节点到未知节点的距离d总是大于实际2个节点间的距离。如图1 所示,信号接收传感器A,B,C,未知信号发射节点D,根据RSSI测距模型分别计算出的节点A、B、C这3个点到D的距离rA、rB、rC。分别以A、B、C为圆心,rA、rB、rC为半径画圆,3个圆相交。三角质心定位算法的基本思想[25]是:计算3个圆交叠区域的3个特征点E,F,G的坐标,这3个点构成的三角形的质心为未知点M。

图1 质心定位算法原理图Fig. 1 Schematic diagram of centroid location algorithm
特征点E点的坐标(xE,yE)计算方法为:
(8)

传统的三角质心算法假定每组估计坐标的权值相等,不能反映数据的不同影响。基于距离倒数的加权质心定位算法在距离测量值较精确时可以得到较优的定位结果,但当 RSSI数据本身的误差较大时,会直接影响到距离测量,进而导致误差累积,降低定位精度。崔法毅等[26]指出,在解方程时,当b为准确值时,可以得到正确的坐标估计值X,方程AX=b左右相等,但b在实际定位过程中总是存在一定误差,且b的误差越大,方程解算结果的误差也越大,坐标估计值的精度越低。文中以解得坐标误差值的倒数为权值改进加权质心算法,如式(9)所示:
(9)
(10)
(11)
文中采用基于误差倒数的加权质心算法分析了3个定位结果对定位精度的不同影响力,误差较大的数据权值较小,误差较小的数据权值较大,优化了基于距离倒数的加权质心算法,从定位结果的精度中选择权值,避免了误差累积,提高了定位结果的精度。
1.4 基于WiFi和蓝牙定位结果的混合定位方法
1.4.1 定位流程
文中依据WiFi和蓝牙定位2种定位坐标之间的间距和RSSI值的分析结果,评估2种定位结果的可信性,从而实现定位结果的混合。根据评估结果,主要有WiFi 定位可信、WiFi 定位不可信、蓝牙定位可信、蓝牙定位不可信4种判定来解算最终定位结果。如图2所示,当WiFi定位结果和蓝牙定位结果同时可信或同时不可信时,则取加权平均值作为最终定位结果;若WiFi定位结果可信,蓝牙定位结果不可信时,则取WiFi定位结果作为最终定位结果;反之则取蓝牙定位结果作为最终定位结果。
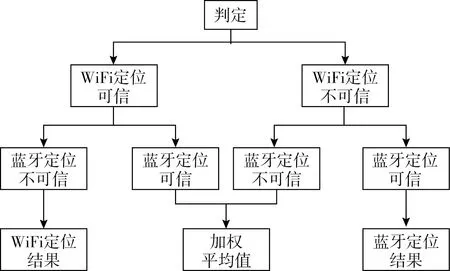
图2 定位流程图Fig. 2 Positioning flow chart
1.4.2 定位结果可信度评估
定位结果可信度评估方法流程如图3所示,通过WiFi和蓝牙定位坐标之间的坐标间距DBTP判断当前定位结果是否存在异常现象,如果DBTP小于阈值T,说明两者定位结果比较接近,即WiFi和蓝牙定位都可信,取两者的加权平均值作为最终定位结果;但是,WiFi和蓝牙定位结果易受压埋环境影响,出现误差的概率较大,WiFi和蓝牙定位结果之间的间距不可能一直相近,如果DBTP大于阈值T,说明两者定位结果中可能存在异常定位结果,即某种定位结果不可信或2种定位结果都不可信。针对这种情况,文中通过对强RSSI数量进行分析判断定位结果的可信性,若蓝牙强RSSI数量大于WiFi强RSSI数量,则取蓝牙定位结果;若WiFi强RSSI数量大于蓝牙强RSSI数量,则取WiFi定位结果;若两者强RSSI数量相同则取加权平均值作为定位结果[27]。
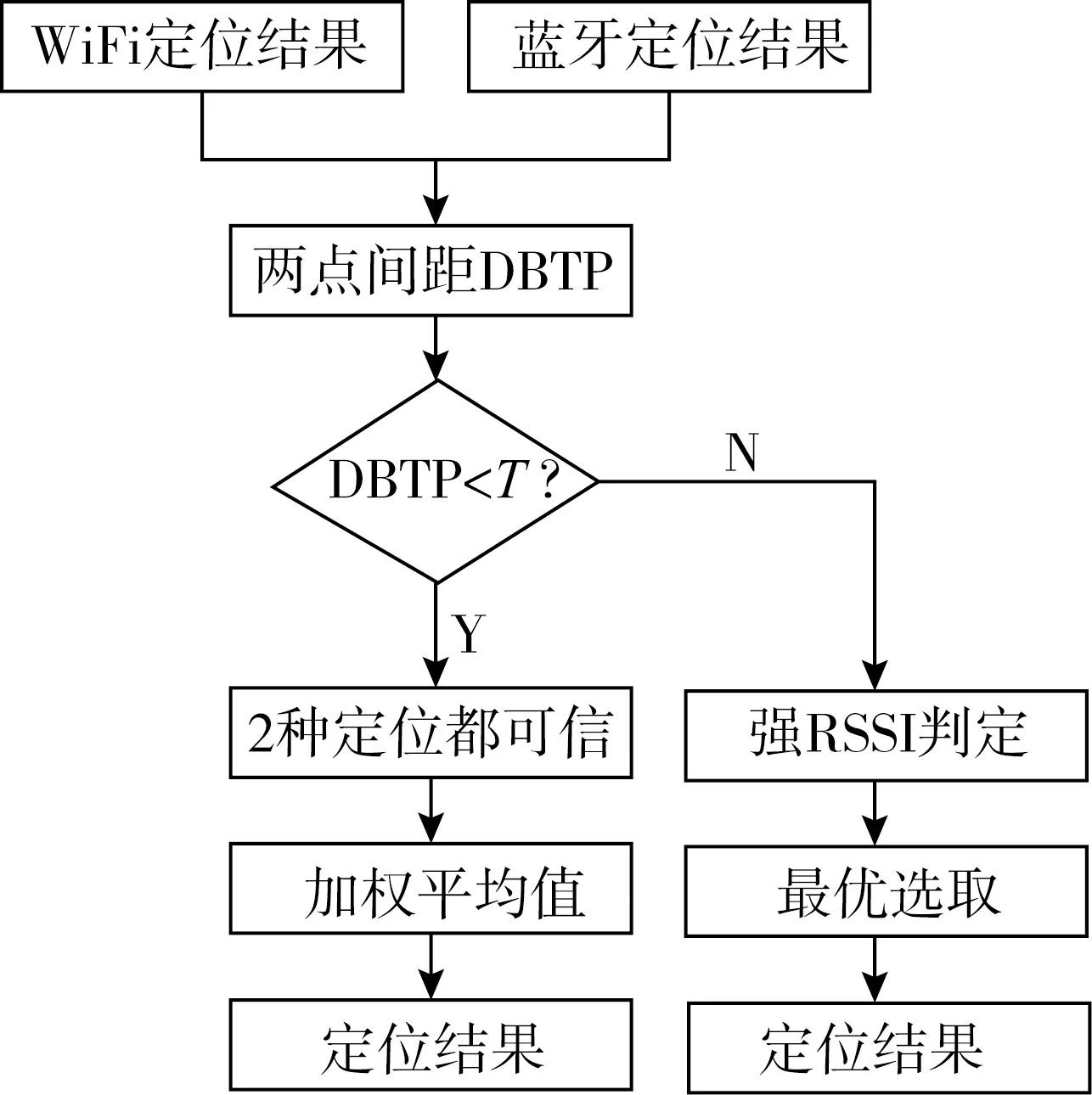
图3 定位结果可信度评估流程图Fig. 3 Flow chart of reliability evaluation of positioning results
理想条件下,RSSI值越大,定位精度越高,因此可根据RSSI的大小确定WiFi和蓝牙定位结果的权重,计算公式如式(12)所示:
(12)
式中:BW为蓝牙定位结果的权重;WW为WiFi 定位结果的权重;RSSIBi为第i个蓝牙节点的RSSI值;RSSIWi为第i个WiFi节点的RSSI值;M、N分别为接收WiFi和蓝牙信号强度的传感器个数。
2 实验
2.1 实验环境
由于震后压埋环境复杂,震后建筑物倒塌按其破坏程度可以主要分为局部垮塌、整体倾斜、整体垮塌这3类,刘晶晶等[28]分别提出了 “倾斜型”、“塌落型”和“复合型”3种典型的压埋环境,其中“倾斜型”压埋环境的整体生存空间大,稳定性最强,压埋人员的存活率最高,因此文中模拟“倾斜型”压埋环境进行实验分析,无线信号在该压埋环境中的大致信号传播路径如图4所示。
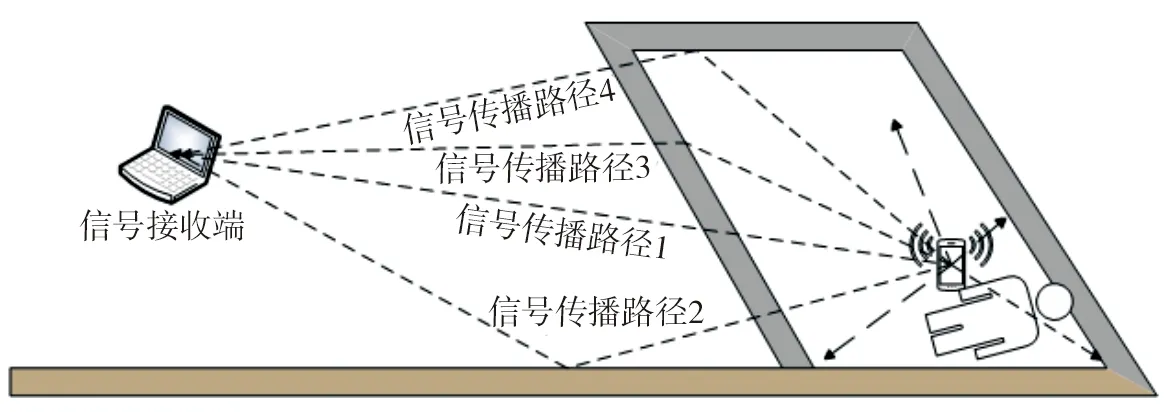
图4 “倾斜型”压埋环境无线信号传播路径Fig. 4 Wireless signal propagation path in "inclined" buried environment
“倾斜型”压埋环境影响无线信号传播的障碍物主要为建筑物支撑墙,文中选择室外与废墟环境较为吻合的独立建筑物作为模拟压埋环境,其外墙为370 mm厚度的砖混结构,该结构为国内早期城镇建筑物外墙的主要标准结构,也是地震易发区主要的建筑物外墙结构,其抗震等级要低于框架结构,在地震中更易倒塌。实验过程中,压埋智能设备固定在模拟压埋环境内部高1 m的支架上,WiFi、蓝牙信号接收传感器分布在模拟压埋环境周围,同样固定在高1 m的支架上。通过实验分析“倾斜型”压埋环境下主要障碍物对无线信号衰减的影响,建立与之匹配的无线信号衰减模型适应实际的震后压埋手机的定位模型。
传感器的分布采用“四边形”传感器分布模型,如图5所示,其中4个WiFi探针和4个蓝牙网关分别分布于边长20 m的正方形的4个顶点,平面坐标分别为(0,0)、(20,0)、(20,20)、(0,20),模拟压埋智能设备位于“四边形”内任意位置。
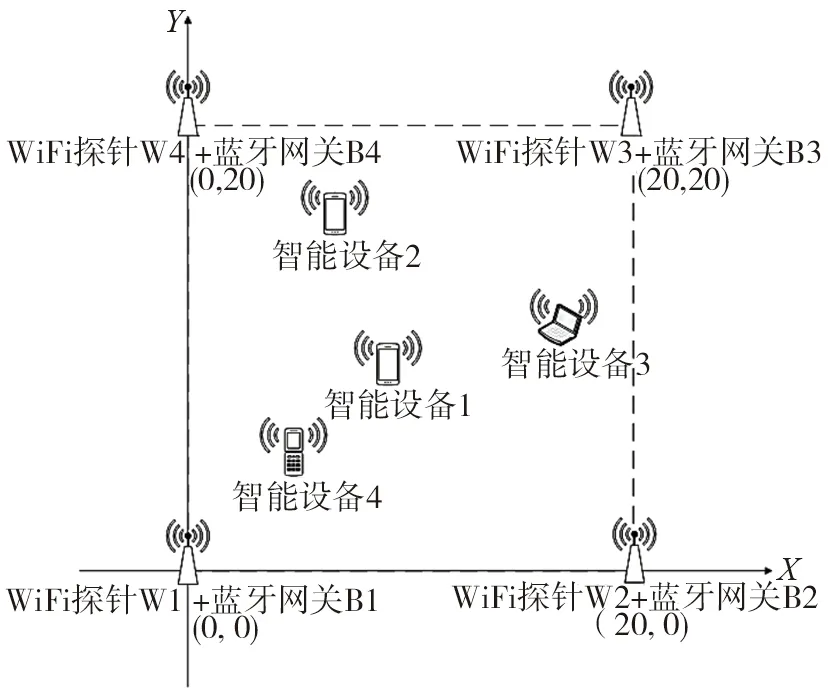
图5 传感器分布模型Fig. 5 Sensor distribution model
实验人员分别将WiFi探针和蓝牙网关布置在对应平面位置,设置好相关数据采集系数,WiFi和蓝牙的RSSI数据采集同时进行,采集频率为1 Hz,每个数据采集点共采集100组RSSI数据。
2.2 无线信号衰减参数估计
由于采集的WiFi和蓝牙RSSI值存在多路径、非视距等因素影响导致信号波动,在进行参数估计前需要分别对WiFi和蓝牙RSSI数据进行滤波处理,根据1.1节介绍的滤波方法,通过MATLAB进行数据处理,通过分别对距压埋智能设备1~15 m进行WiFi 、蓝牙RSSI数据采样滤波处理,从图6可知,由于原始数据中存在较多突变的点,采用单一卡尔曼滤波算法,导致数据输出整体波动性较大;单一的均值滤波和中值滤波数据输出波动更加明显;单一的高斯拟合方法无法在允许范围内消除大范围波动;混合滤波能有效地消除数据突变点和突变间隔,平衡数据的噪声波动,使数据输出更加准确、平滑。如图7所示,混合滤波处理后的数据线性拟合绝对距离误差的计算结果明显优于其他单一滤波的处理效果。
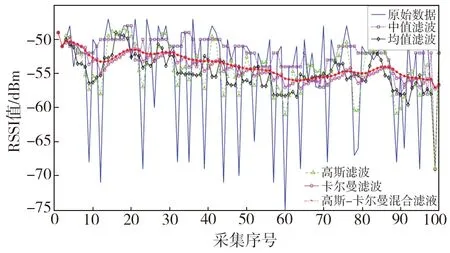
图6 RSSI滤波效果Fig. 6 RSSI filtering effect
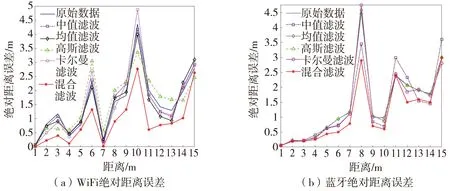
图7 WiFi、蓝牙绝对距离误差Fig. 7 WiFi, Bluetooth absolute distance error
将几种滤波后的WiFi、蓝牙RSSI值分别带入各自的距离损耗模型中,计算得到均方根误差RMSE(见表1),其中混合滤波处理方式的均方根误差最小,这说明混合滤波效果最佳,因此文中将采用经混合滤波处理后的RSSI 值建立距离损耗模型。

表1 5种滤波方法均方根误差Table 1 RMSE of five filtering methods
由式(7)可知,常数A和路径衰减指数n的选取会直接影响距离d的计算。A和n的值主要由周围的压埋环境决定,为了保证测距精度,一般采用线性回归算法进行优化以得到最逼近当前环境信号传播特性的参数值。
参数优化的具体步骤为:
1)距离模拟压埋环境发射节点每隔1 m就分别测量一组WiFi和蓝牙RSSI值,每组包含100个RSSI数据,共15组RSSI值;
2)对不同距离下的15组RSSI值分别采用混合滤波进行滤波处理;
3)采用线性回归算法分别得到“倾斜型”压埋环境下WiFi和蓝牙的无线信号衰减参数,分别用(A1,n1), (A2,n2)表示,拟合曲线如图8所示。
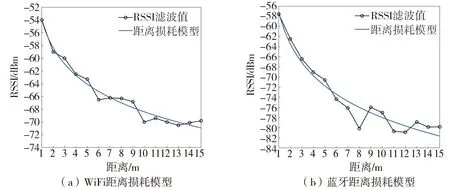
图8 WiFi、蓝牙距离损耗模型Fig. 8 WiFi, Bluetooth distance loss model
混合滤波处理后的WiFi、蓝牙RSSI线性拟合参数估计值如表2所示。

表2 WiFi、蓝牙无线信号衰减参数估计值Table 2 Estimation of attenuation parameters of WiFi and Bluetooth wireless signals
2.3 阈值T的选取和强RSSI的判定
由1.4.2节可知,根据WiFi和蓝牙定位结果的坐标间距DBTP判断定位结果的可信度,当坐标间距小于阈值T时,则WiFi和蓝牙定位结果都可信,取加权平均值作为最终定位结果,反之则认为定位结果异常。为确定阈值T,文中分别选取1~10 m共10组阈值,每组传感器分别采集10组WiFi和蓝牙RSSI数据,每组包含100个RSSI,进行10次定位实验。若WiFi和蓝牙定位结果都可信,即DBTP小于阈值,则取加权平均值作为混合定位结果,计算出定位结果的误差,并统计次数;若定位结果不可信,即存在异常定位结果导致DBTP大于阈值,则取消此次定位,进而得到不同阈值情况下的平均误差和混合定位次数。如图9所示,当阈值T增大时,平均定位误差趋于增大,DBTP小于阈值T的次数也不断增加。当阈值为5 m时,平均定位误差为0.92 m,DBTP小于T的次数为7次,定位误差较小且次数足够多,故文中选取5 m作为阈值。
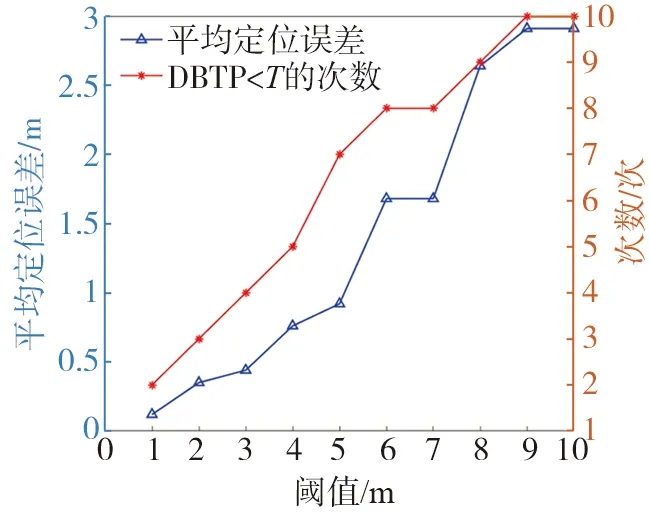
图9 平均定位误差及DBTP小于T的次数Fig. 9 Average positioning error and times when DBTP is less than T
RSSI测距定位通过信号强度特征实现定位,RSSI越强,定位效果越好。定位时刻能接收到很多压埋设备发射的WiFi和蓝牙RSSI信号,如果大部分RSSI较小,信号特征不明显,将造成信号波动性增加,增大测距定位的误差。由图10(a)、(b)分别表示WiFi、 蓝牙的距离损耗模型和绝对距离误差对比可知, 随着定位距离的增加,绝对距离误差明显增大,其中WiFi距离损耗模型中绝对距离误差在7 m处变化最为明显,根据线性拟合公式计算d=7 m时,RSSI=-66.13 dBm,取整后即WiFi RSSI大于-66 dBm时判定为强RSSI;同理蓝牙距离损耗模型中绝对距离误差在7 m处变化也最为明显,根据线性拟合公式计算d=7 m时,RSSI=-74.78 dBm,取整后即蓝牙RSSI大于-75 dBm时判定为强RSSI。最后通过统计并比较WiFi、蓝牙强RSSI的数量,进而判断定位结果的可信性。
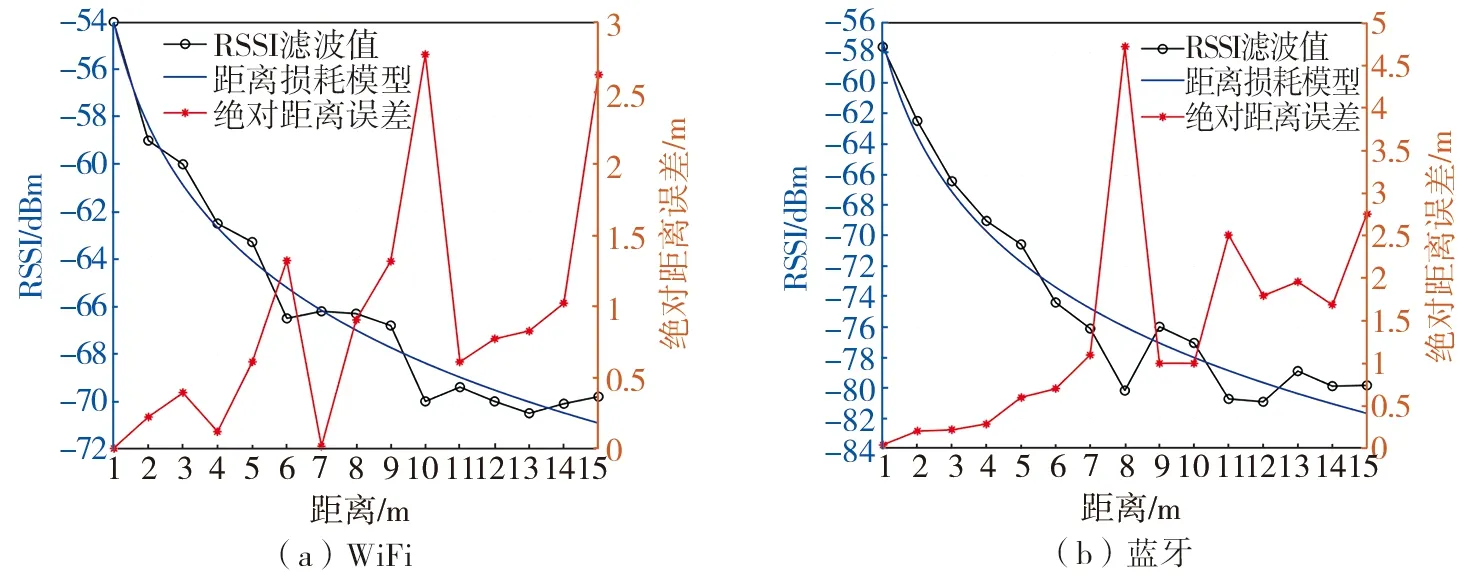
图10 距离损耗模型与绝对距离误差比较Fig. 10 Comparison between distance loss model and absolute distance error
2.4 定位实验
2.4.1 实验结果分析
为验证基于WiFi-蓝牙混合定位方法的优越性,文中通过定位实验分析对比基于RSSI测距的WiFi定位方法、蓝牙定位方法和混合定位3种定位方法的定位误差,其中3种定位方法在数据滤波、定位模型、定位算法和定位传感器的位置分布均保持一致。文中选取在20 m×20 m的模拟地震压埋环境内的13个已知坐标点,分别为(5,5)、(5,10)、(5,15)、(10,5)、(10,10)、(10,15)、(15,5)、(15,10)、(15,15)、(7.5,7.5)、(12.5,7.5)、(7.5,12.5)、(12.5,12.5),单位为m。利用2.1节介绍的“四边形”传感器分布模型分别对13个点进行定位试验,3种定位方法的定位平面图见图11。
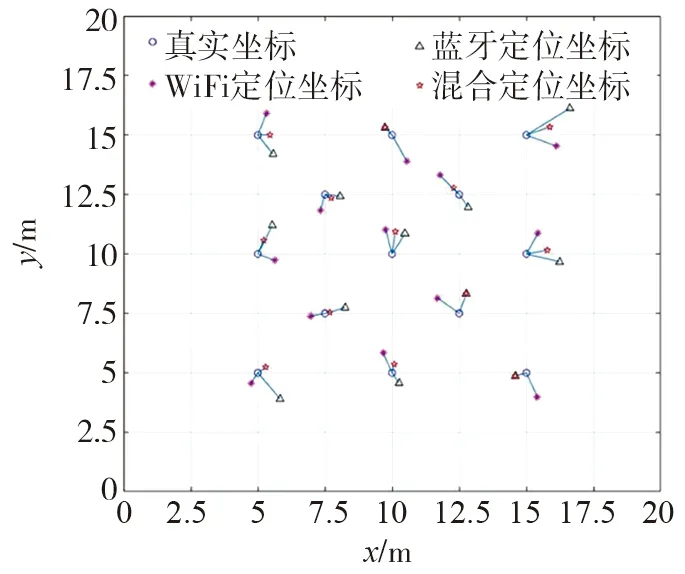
图11 定位平面图Fig. 11 Positioning plan
由表3定位结果与误差比较可知,基于WiFi-蓝牙混合定位方法的定位效果优于WiFi定位与蓝牙定位,单一的WiFi和蓝牙定位技术的平均定位精度分别为0.917 m和0.867 m,而基于WiFi-蓝牙混合定位技术的定位精度为0.541 m,相对于单一的WiFi和蓝牙定位技术,定位精度分别提高了41%和37.6%。
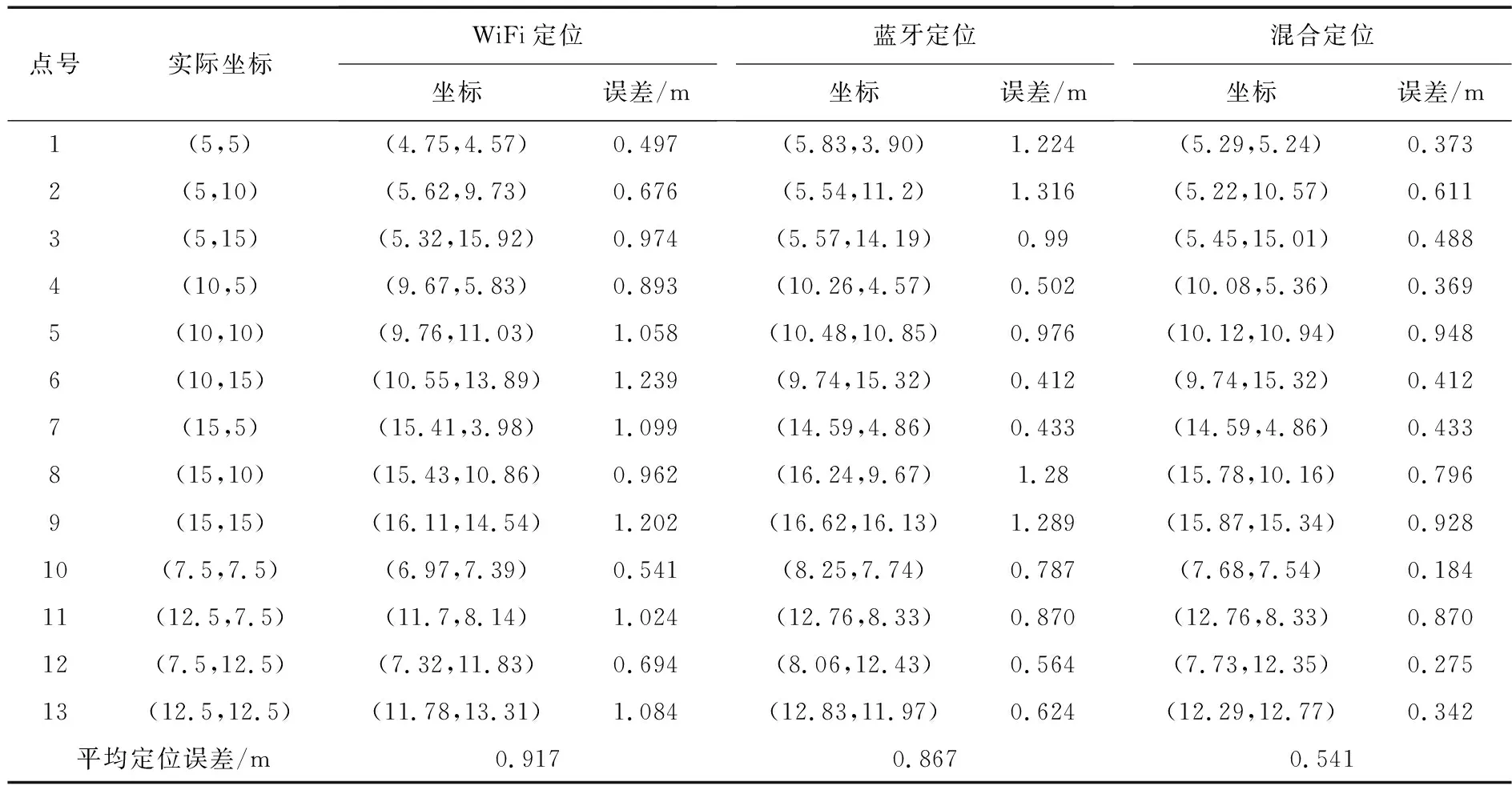
表3 定位结果与误差比较Table 3 Comparison of positioning results and errors
2.4.2 定位效率对比实验
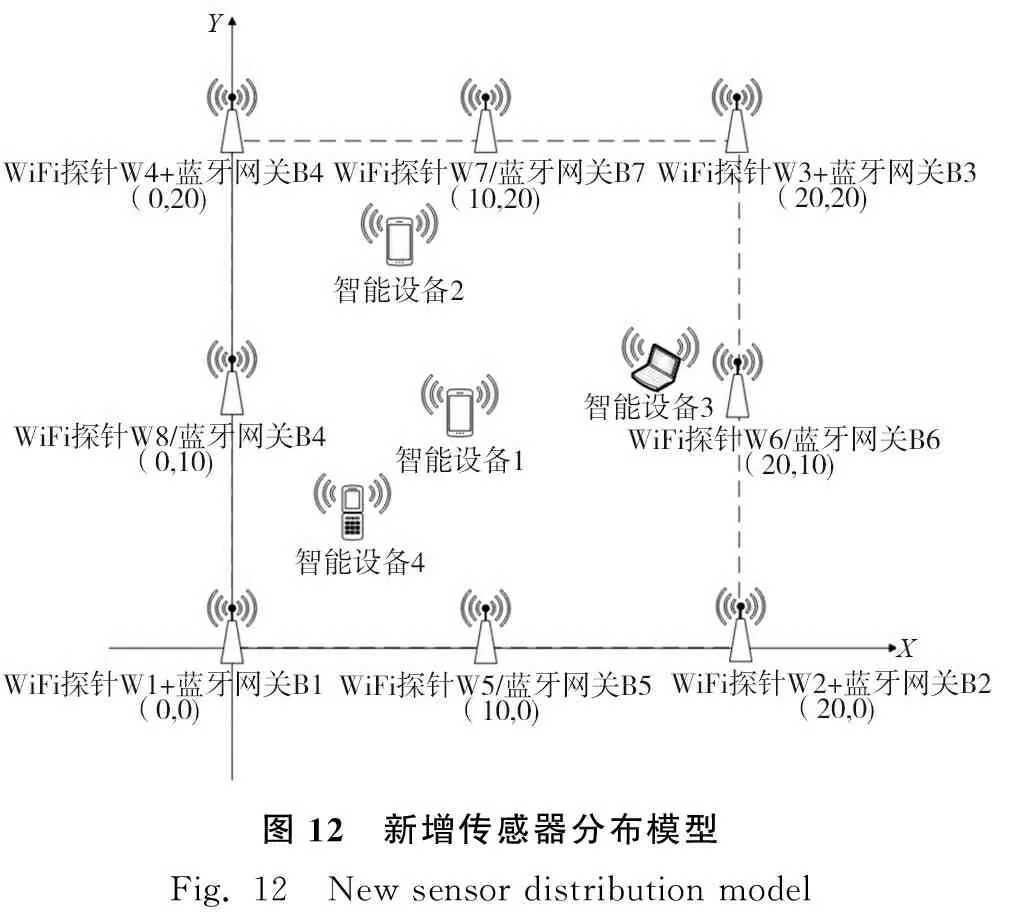
为进一步验证文中提出的混合定位技术优于单一的WiFi定位技术和蓝牙定位技术,通过以下实验增加定位传感器数量对比定位时间与定位精度的变化关系。在“四边形”传感器分布模型的基础上,分别依次在每条边的中点增加一个WiFi探针或蓝牙网关,分布模型如图12所示。
分别利用“四边形”传感器分布模型中的8个WiFi探针和蓝牙网关依次进行单一的WiFi定位实验和蓝牙定位实验,并结合2.4.1节的实验,对每次实验平均耗时进行统计,实验结果如表4所示。
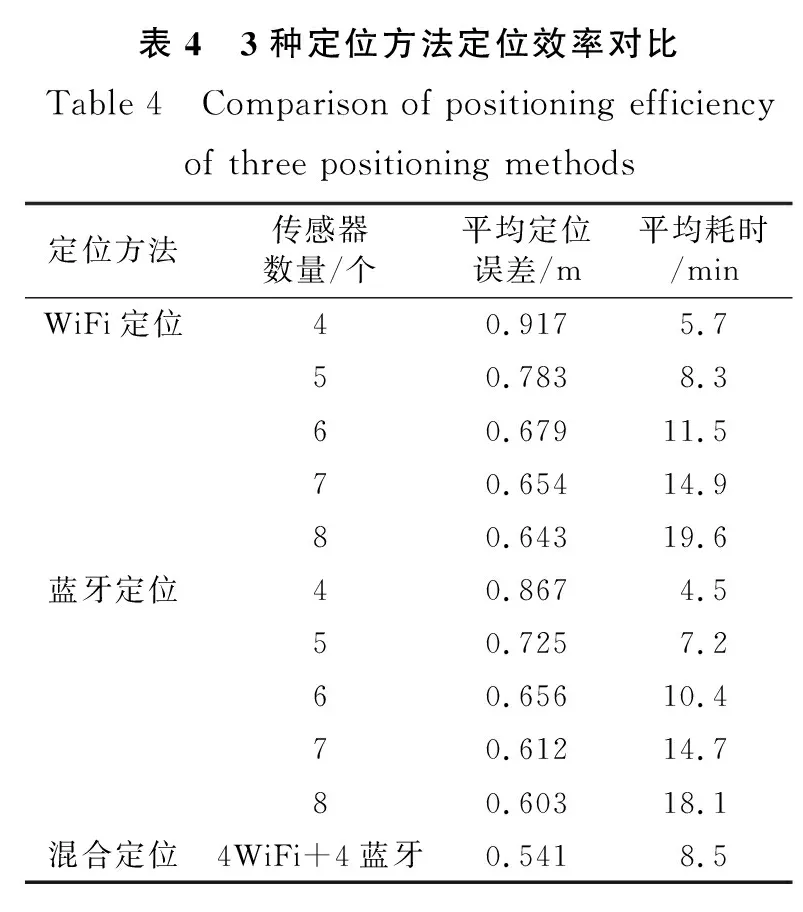
实验结果表明,增加单一定位传感器数量虽然可以提高一定的定位精度,减少偶然误差,但增加定位传感器后定位精度仍低于混合定位的定位精度,且当传感器增加到一定数量后精度变化降低,精度值趋于稳定。文中采取的定位算法只需要3个强RSSI数据,增加定位传感器数量的同时也会增加数据冗余度,定位时间也相应增加,文中是基于震后压埋人员的救援定位,定位效率是首先考虑的问题,即要求在尽量短的定位时间内达到足够的定位精度,为后续的救援工作开展争取足够的时间。综上,文中提出的混合定位方法能在相对较短的时间内满足一定的定位精度,实现定位效率最大化。
3 结束语
文中根据理论研究和实验分析提出的基于WiFi-蓝牙混合定位技术的震后压埋人员手机定位方法,充分利用了压埋智能设备在压埋环境中发射的WiFi和蓝牙RSSI数据,通过对模拟震后压埋环境中获取的信号强度值进行高斯-卡尔曼混合滤波处理,建立适用于“倾斜型”压埋环境的距离损耗模型,采用改进的加权质心定位算法分别解算WiFi和蓝牙定位坐标,最后对2种定位结果进行可信度评估解算最优值作为定位结果输出,实验结果表明该方法在定位精度和定位效果上都具有一定的优越性,提高了震后压埋人员的搜救效率,使之更适用于震后压埋人员的定位救援工作,为震后救援工作提供了新的技术支持。
猜你喜欢
军事文摘(2023年4期)2023-04-05
工业设计(2022年7期)2022-08-12
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
玩具世界(2017年8期)2017-02-06
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23