
旋转不变描述和差异化约束的机载SAR 图像连接点提取
2023-05-10 10:26信息工程大学张昊
数字技术与应用 2023年4期
信息工程大学 张昊
为解决机载SAR 图像连接点自动稳健提取,提出一种利用旋转不变描述和差异化约束的机载SAR 图像连接点提取方法。在SAR-SIFT 基础上,通过重投影计算旋转不变梯度,在密集GLOH 网格中捕获梯度直方图,并为待匹配图像上的特征点提取多个方向的描述子实现描述子方向估计,从而高效得到旋转不变描述子;通过在FSC 算法中引入差异化约束模型,在误匹配剔除过程中避免了正确匹配点对漏检。
合成孔径雷达是一种主动型微波遥感传感器,但单幅机载SAR 图像覆盖的区域范围有限,面向大区域机载SAR 测绘生产,通常需要获取覆盖测区的多幅SAR 图像,但由于复杂几何畸变和SAR 图像相干斑的影响,连接点自动提取较为困难,严重制约测绘生产的效率。本文基于SAR-SIFT 算法,设计了一种利用旋转不变描述和差异化约束的机载SAR 图像连接点提取方法。采用国产机载高分辨率毫米波SAR 数据进行连接点匹配实验,验证了本文算法的正确性和有效性[1,2]。
1 SAR 图像连接点提取
为了提高SAR-SIFT 算法匹配连接点的效率和稳健性,本文在SAR-SIFT 算法中引入旋转不变描述子并设计差异化约束误匹配点剔除方法。
1.1 旋转不变描述子构造
构造特征描述子主要包括两个步骤:主方向分配和网格表达。主方向分配的目的是找到特征点的主方向,从而确定图像特征描述的起始方向,使描述子具备旋转不变性;网格表达的目的是在像素空间对图像特征进行稀疏采样,得到低维度的描述子,提高特征匹配效率。在SAR-SIFT 算法中,采用类似SIFT 的分布直方图的方式获取主方向并且采用GLOH 网格[3]进行格网表达。
为了提高描述子的可区分性和计算效率,设计一种基于旋转不变梯度和密集GLOH 格网的旋转不变描述子。首先在特征点局部区域内对比率梯度重投影,获得旋转不变梯度值,然后在密集GLOH 格网中获取梯度分布直方图。如图1(a)所示,特征点p的局部邻域R内存在点q,q的比率梯度强度和方向分别为gq和θq,将q的梯度矢量重投影到径向方向(p到q的方向)为x轴和垂直径向方向为y轴的局部坐标系,则重投影后梯度角度如式(1)所示:
重投影不会改变梯度强度,且p和q的相对位置能够在图像旋转后保持相对不变,如图1(b)所示,因此则重投影后的梯度具备旋转不变性。
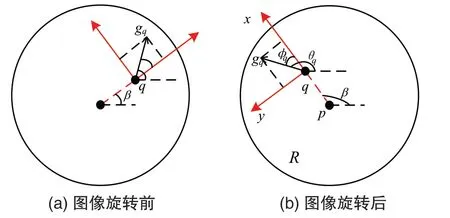
图1 比率梯度重投影示意图Fig.1 Schematic diagram of ratio gradient reprojection
获取领域内所有点的旋转不变梯度后,在密集GLOH网格中获取梯度分布直方图。如图2 所示展示了密集GLOH 网格几何结构,该格网共3 个径向区间,外侧两个径向区间被划分为12 个角度区间。网格划分后,每个网格单元构建一个梯度分布直方图,直方图的方向区间数量为6,将所有格网的分布直方图连接起来构建描述子向量D,得到如式(2)所示:
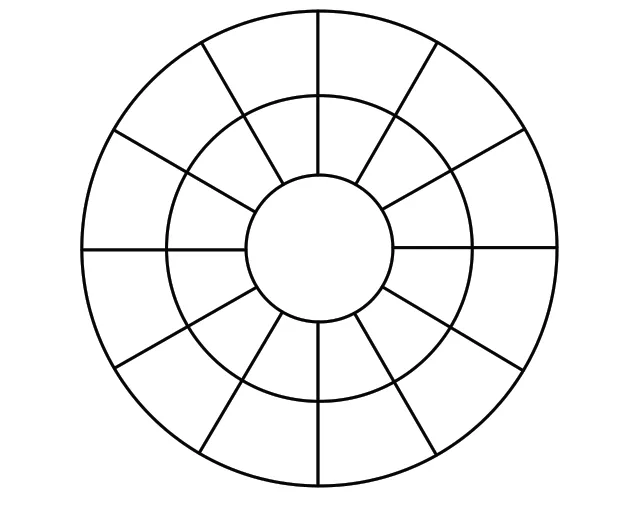
图2 密集GLOH 格网结构示意图Fig.2 Schematic diagram of dense GLOH grid structure
其中,Wi是第i个径向区间的描述子向量,Vi,j是区间(i,j)的描述子向量,Ui,j,k是Vi,j中第k个描述子数值。描述子的维度为(1+12×2)×6=150。为了增强描述子的辐射不变性,需要将描述子向量归一化为单位长度。
上述步骤描述了如何构造特征向量,但没有考虑图像之间的旋转变化。为了消除图像旋转差异的影响,设计了一种旋转不变性增强方法,该方案为参考图像中每个特征点计算一个描述符向量,为待匹配中每个特征点计算12 个不同方向的描述子向量。
下面详细介绍生成第s个方向描述子向量的过程。第s个方向描述子向量基于图像间旋转差异为360s/12=30s度的假设计算。由于梯度值不随图像旋转而变化,可以通过轮转外侧两个径向区间的描述子向量快速获取不同方向的描述子向量。第s个方向的外侧两个径向区间描述子向量Wis如式(3)所示:
第s个方向描述子向量Ds如式(4)所示:
总之,上述方案仅在密集GLOH 格网中捕获一次描述符向量,可以通过轮转描述子向量快速生成12 个方向的描述子向量。
1.2 描述子方向估计
参考图像获取一个方向描述子且待匹配图像获取12个方向描述子后,通过NNDR 方法选择对应匹配。对于一个匹配对,由于待匹配图像中每个特征点有12 个不同方向的描述子向量,因此该匹配对能够得到12 个距离比值。距离比较小的匹配对更可能是正确匹配,因此可从12个距离比值中选择最小值作为该匹配对的最终距离比值,最终距离比值对应一个取值为1,2,…,12 的方向索引。
选择最终距离比值最小的前300 个匹配对构成样本集合,统计这300 个样本方向索引的直方图,由于该样本集合的匹配正确率较高,最大匹配对数量对应的方向索引值可认为是描述子的正确方向,从而完成描述子方向估计。确定正确方向后,对于待匹配图像中的每个特征点,只保留正确方向的描述子,剔除其他方向的描述。
1.3 差异化约束误匹配剔除
经过描述子方向估计后,每个特征点都只对应一个描述子向量,可以采用NNDR 匹配策略获得初始匹配对,该匹配点对通常包含一定数量的误匹配,需要剔除误匹配以精化匹配结果。SAR-SIFT 算法中采用改进的RANSAC 算 法, 如FSC 算 法 或AC-RANSAC 算 法,在少量迭代的情况下,从包含大量误匹配的结果中稳健地提取正确的匹配点对。这些算法均采用严格的几何变换模型,通常是仿射变换模型建立匹配点对几何关系,即有如式(5)、式(6)所示:
其中,式(5)和式(6)分别为距离向和方位向坐标变换公式。x1和x2为两幅SAR 图像距离向坐标,y1和y2为两幅SAR 图像方位向坐标。ai和bi(i=0,1,2)为变换模型参数。正确匹配点对的判定准则如式(7)所示:
其中,T为判定阈值,通常为一个较小的值,u和v分别为距离向和方位向残差,
由于斜距SAR 图像距离向几何畸变引起的几何差异较大,严格几何模型会导致匹配精化结果陷入局部最优,大量正确匹配点对漏检。为改善这一问题,本文在距离向和方位向采用差异化约束阈值,如式(8)所示:
其中,T1为距离向阈值,可设为一个较大的值,T1=100;T2为方位向阈值,可设为一个较小的值。
本文在FSC 算法中采用差异化约束进行误匹配剔除,由于距离向阈值较大,在FSC 算法剔除误匹配后需要基于计算距离向残差,采用3σ法则进一步剔除误匹配点。误匹配剔除的具体步骤为:
(1)基于NNDR 匹配策略提取两个匹配点对集合,分别为样本匹配集和总匹配集。样本匹配集对应选择距离比最小的前300 个匹配对,正确匹配点对占比较高;总匹配集对应的距离比率阈值为1,包含了大量的正确匹配点对。
(2)从样本匹配集中随机选取一个样本(包含3 个匹配点对),利用该样本初始化两幅图像间的仿射变换模型。
(2)对于总匹配集中的每个匹配点对,分别计算方位向和距离向残差,距离向残差小于100 像素、方位向残差小于1.5 像素的匹配点对认为是正确匹配点对,所有正确匹配点对构成初始正确匹配集。
(4)重新选取样本,重复步骤(2)~(3)K次,获取匹配点对数量最大的初始正确匹配集,以及该集合中每个正确匹配对应的距离向残差。
(5)计算距离向残差的均值和方差,将残差不满足3σ法则的匹配点对从初始正确匹配集中剔除。
(6)重复步骤(5),直到初始正确匹配集不再变化,输出得到最终的正确匹配集。
2 实验
为了验证本文方法的正确性和有效性,采用机载SAR 系统数据进行连接点匹配实验。实验中,SAR 图像对是在原始SAR 图像重叠区域截取小图像块,图像块大小为1200×1200 像素,共获取3 对SAR 图像,分别覆盖居民地、农田和山地3 种典型场景,如图3 所示,这类图像用于验证算法精匹配机载SAR 图像块的能力。

图3 SAR 图像对Fig.3 SAR image pairs
实验评价指标包括匹配点对数量和计算耗时。计算耗时是评估算法优劣的重要指标,计算耗时在Intel i7-8750H 处理器、32GB 内存和英伟达 Quadro P1000 显卡的笔记本电脑、采用MATLABR2018b 软件统计。
实验采用3 种连接点匹配算法,包括SAR-SIFT 算法、SAR-SIFT-RI 算 法 和SAR-SIFT-RIDC 算 法, 其中SAR-SIFT 算法采用FSC 算法进行误匹配点对剔除,SAR-SIFT-RI 算法构造旋转不变描述子并采用FSC 算法进行误匹配点对剔除,SAR-SIFT-RIDC 算法构造旋转不变描述子并采用差异化约束的FSC 算法进行误匹配点对剔除。
SAR 图像的连接点匹配结果如表1 和图4 所示。SAR 图像的连接点匹配结果表明本文算法能够更加有效精匹配机载SAR 图像块。
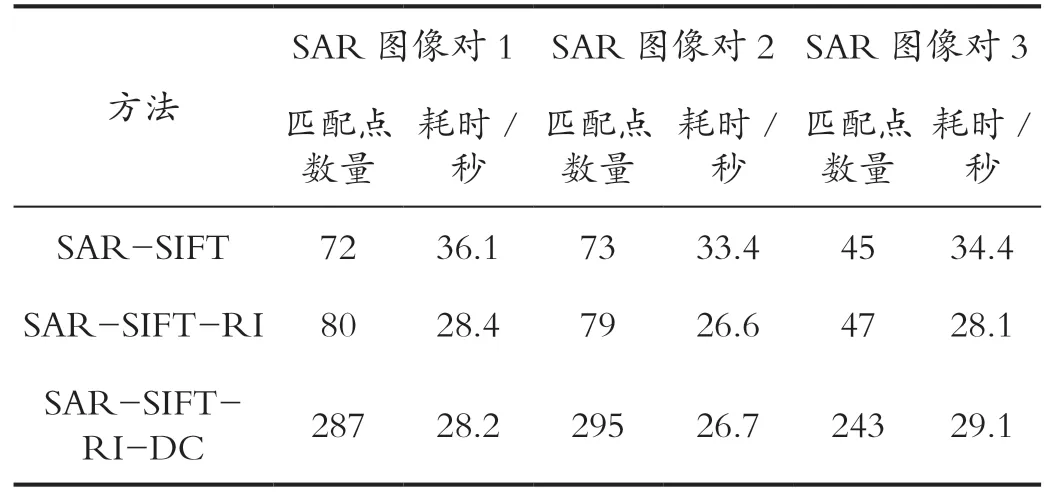
表1 3 对SAR 图像连接点提取结果Tab.1 Extraction results of 3 pairs of SAR image connection points
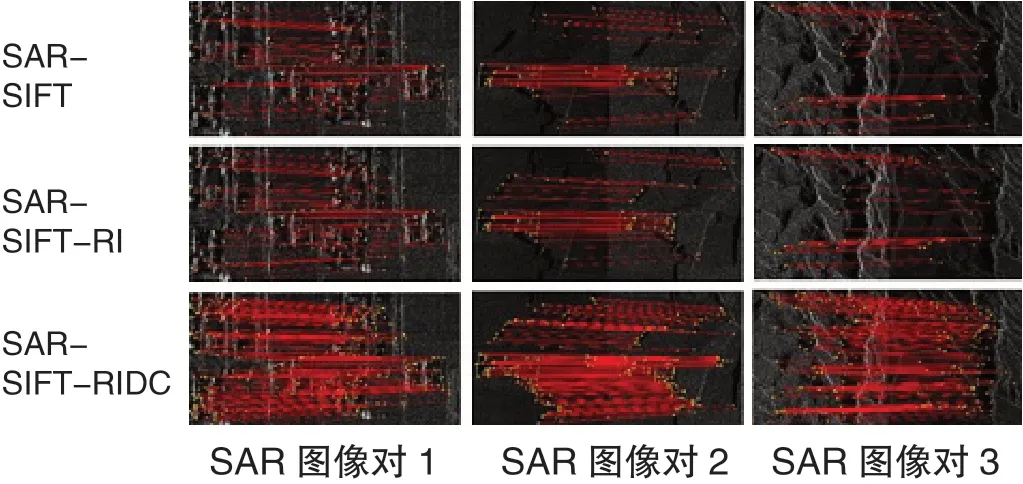
图4 SAR 图像连接点提取结果Fig.4 Extraction results of SAR image connection points
3 结语
本文设计了一种利用旋转不变描述和差异化约束的机载SAR 图像连接点提取方法。通过计算旋转不变梯度并在密集GLOH 网格中捕获梯度直方图,及在FSC 算法中引入方位向强约束、距离向弱约束的差异化约束模型,在误匹配剔除过程中有效避免正确匹配点对的漏检。采用国产机载高分辨率毫米波SAR 数据进行连接点提取实验,实验表明旋转不变描述能够提高连接点提取效率,差异化约束能够增加提取的连接点数量。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
河南城建学院学报(2020年3期)2020-08-14
空间科学学报(2020年6期)2020-07-21
摄影之友(影像视觉)(2018年12期)2019-01-28
汽车文摘(2016年6期)2016-12-07
潍坊学院学报(2016年6期)2016-04-18
江西理工大学学报(2015年3期)2015-12-22
计算机工程(2015年8期)2015-07-03
电测与仪表(2015年3期)2015-04-09
交通建设与管理(2015年15期)2015-03-20
