基于LS-SVM算法的遥感图像目标检测方法研究
2023-05-08 00:20吕霁
安阳师范学院学报 2023年2期
吕 霁
(黎明职业大学,福建 泉州 362000)
遥感图像也称为遥感影像,是记录各种地物电磁波大小的照片,如航空相片、卫星相片等。伴随着遥感技术的快速发展,遥感图像目标检测被广泛应用于国防、军事、灾害应急、生态环境检测等领域[1]。和其他的图像不同,遥感图像能够在一定程度上反映目标的颜色、大致形状、纹理等特点,但是图像受到光照、拍摄背景、目标形态等的影响比较大,这使得传统的目标检测方法在遥感图像目标检测中面临巨大的挑战。伴随着人工智能技术的快速发展,各种机器学习算法在遥感图像目标检测中得到了广泛的应用[2]。支持向量机(Support Vector Machine,SVM)是一种广义的线性分类器,算法具有极佳的稳健性,被广泛应用于数据的二元分类问题中。最小二乘支持向量机(Least Squares Support Vector Machine, LS-SVM)是基于结构风险最小化原则的核函数学习机器,将其应用于遥感图像目标检测中,能够得到更为清晰的高质量检测目标[3]。
1 LS-SVM算法
SVM主要是用于解决广义的线性样本分类问题,LS-SVM是对SVM算法的改进,可以有效地解决非线性样本分类问题。设样本数据集为D={(x1,y1),(x2,y2),…,(xn,yn)},那么
y(x)=ωTϑ(x)+b
(1)
其中,ω为权重向量,b为偏置阈值,ϑ(x)为投影函数。
为了求解所建立的模型,将式(1)进行转化,得到求解函数最小值的优化问题,即
(2)
满足
yi=ωTϑ(xi)+b+εi
(3)
其中,δ为正则化参数,εi为训练误差。
基于拉格朗日乘子法,该函数最小值优化问题转化为拉格朗日函数,其表达式为[4]

(4)
其中,αi为拉格朗日乘子。
2 遥感图像目标检测模型构建
遥感图像受到拍摄环境、拍摄角度等多种因素的影响,这使得对遥感图像的目标检测面临巨大的挑战。基于LS-SVM算法构建遥感图像目标检测模型,具体流程如图1所示。
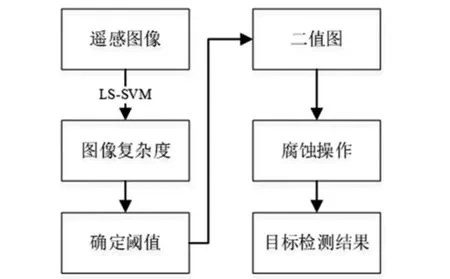
图1 遥感图像目标检测流程图
2.1 遥感图像背景复杂度
遥感图像拍摄受到光照、拍摄背景等多种因素的干扰,这导致对遥感图像的目标检测难度较大。采用LS-SVM算法能够对遥感图像不同灰度等级出现的种类与次数进行统计分析,从而对遥感图像背景的复杂程度做出精准化判断。设遥感图像的信息熵为GH,遥感图像的边缘比率为GR,遥感图像灰度共生矩阵反差为GK,遥感矩阵能量为GJ,遥感图像目标与背景对比度为GCOV,那么可以得到遥感图像复杂程度G,即[5]
G=GH+GR+GK-GJ-GCOV
(5)
遥感图像信息熵GH、边缘比率GR以及对比度GCOV的计算公式为
(6)
其中,Qi为遥感图像的第i灰度等级出现频率,QEdge为遥感图像中处于边缘的像素个数,W为遥感图像中所有像素的总和,K为遥感图像灰度共生矩阵,ϑa和ϑb为矩阵K每行元素和每列元素的均值,σa和σb为矩阵K每行元素和每列元素的标准差。
由此可知,遥感图像背景复杂度和遥感图像目标物的点数量、目标物的纹理等变化之间呈正比,和背景的平滑程度之间呈反比。
2.2 目标区域预提取
在对遥感图像的背景复杂度进行分析之后,进行遥感图像中目标所在区域的预提取。遥感图像目标区域预提取的过程就是特征计算的过程,对遥感图像的光谱特征进行分析,通过统计分析来获得目标区域的大致形状特征。假定遥感图像由背景颜色和前景色构成,通过遥感图像的背景复杂度来科学设定阈值,将遥感图像进行自适应二值分割,达到图像分离的目的。图像二值化原理示意图见图2[6]。

图2 图像二值化示意图
如果像素值大于设定的阈值,那么判定为前景色,像素值为1;如果像素值小于设定的阈值,那么判定为背景色,像素值为0。将所得到的二值图和遥感图像进行相乘,从而获得遥感图像待检测目标所在的大致区域。
2.3 目标检测
在遥感图像中,目标物体所在处图像的局部灰度值往往会高于周边的区域,因此在对遥感图像进行目标检测的过程中常常是提取相对比较高的目标像素集群,待检测目标在图像灰度空间的分布比光照、云雾、海浪等变化更为强烈,这样就可以在很大程度上降低对图像目标错误检测发生的概率。对遥感图像中灰度空间变化比较缓和的滤除,结合具体的空间分布,设置f(x,y)为灰度级图像,d为结构元。通过腐蚀操作,明亮区域(背景色)变细,黑色区域(前景色),其腐蚀操作示意图见图3[7]。

图3 腐蚀操作示意图
定义灰度级图像f(x,y)和结构元d重合区域的最小值,从而达到对遥感图像目标精准监测的目的,即

(7)
其中,u为图像x方向的变化率,v为图像y方向的变化率。
3 实证分析
3.1 舰船遥感图像目标检测
舰船在军事领域和民用领域具有广泛的应用,通过遥感技术来获得舰船遥感图像,对舰船遥感图像的目标检测可以更好地获得舰船航行的详细地理位置。采用基于LS-SVM算法对舰船遥感图像进行目标检测,数据来源于Google Earth,同时对航拍图像和卫星图像进行整合。对遥感图像目标检测有许多种方法。为了验证该文提出方法的有效性,将联合显著性特征和角度信息方法[8]、改进SSD算法[9]与该文提出的方法进行对比,得到遥感图像目标检测结果如图4所示。
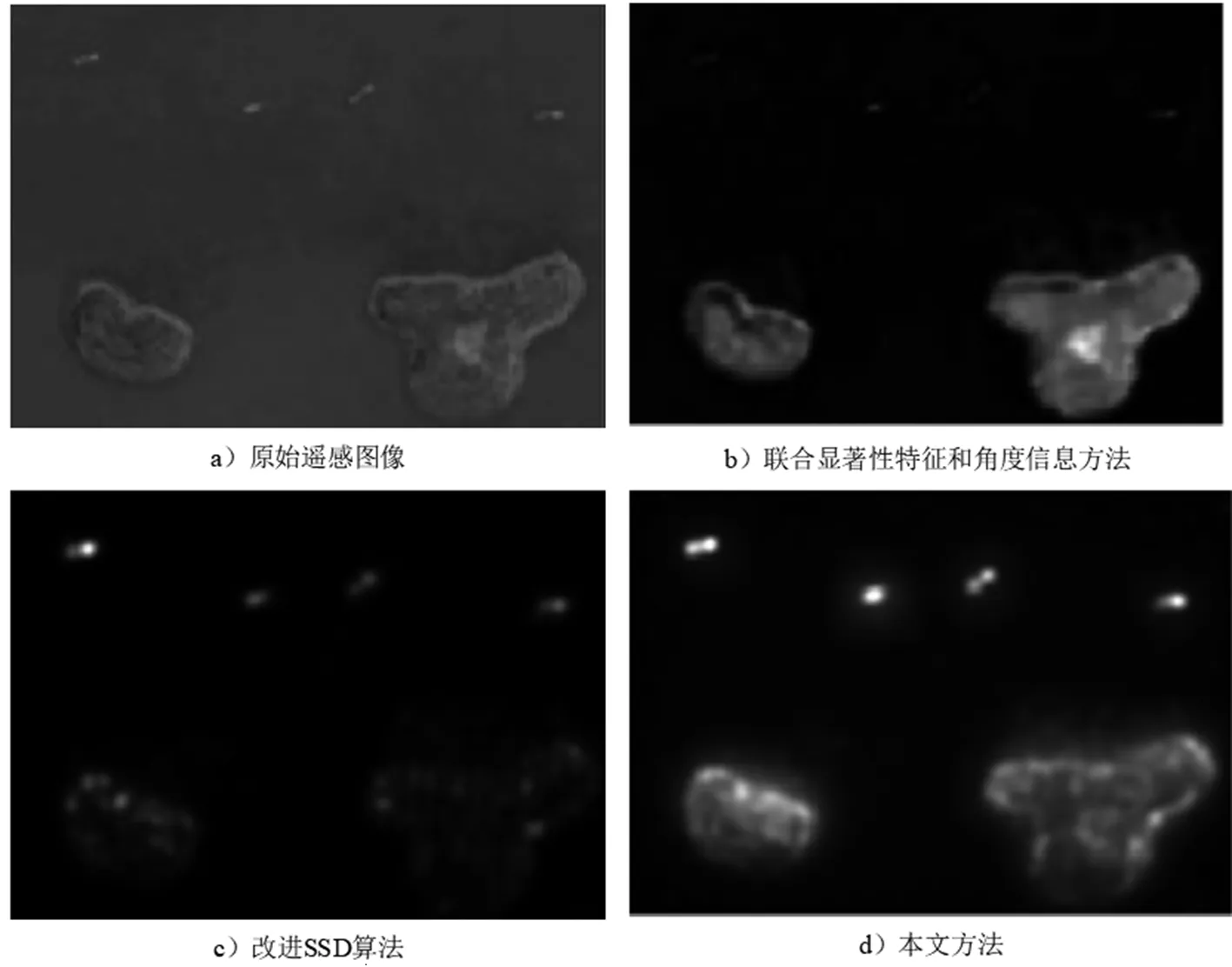
图4 不同方法对比结果
由图4可知,采用联合显著性特征和角度信息方法对舰船遥感图像的目标检测效果最差,改进SSD算法对舰船遥感图像的目标检测效果居中,该文提出的方法对舰船遥感目标检测的效果最佳。对比b)和c)可知,比较强的背景干扰下导致采用联合显著性特征和角度信息方法无法检测比较小的舰船,同时目标检测的性能缺乏稳定性;对比c)和d)可知,尽管改进SSD算法也可以检测舰船遥感图像的目标,但是一些比较暗小的舰船可能会存在丢失的情况,效果不如LS-SVM方法。
3.2 航空遥感图像目标检测
航空遥感图像目标检测在军事、民用中均有十分广泛的应用,如军事目标跟踪、城市交通规划等。实验数据来源于UCAS-AOD数据集,该数据集包含飞机、汽车两类目标,图像中目标的分辨率相对比较低。考虑到联合显著性特征和角度信息方法对遥感图像目标检测性能比较差,研究只对改进SSD算法和该文提出的方法进行对比,得到遥感图像目标检测结果,如图5所示。

图5 目标检测结果对比
由图5可知,改进SSD算法检测出了航空遥感图像中的7架飞机,而该文提出的方法检测出了航空遥感图像中的9架飞机。采用基于LS-SVM算法的航空遥感图像目标检测能够对目标尺寸比较小的目标进行准确检测,提升了航空遥感图像的目标检测准确率。
4 结论
遥感技术的快速发展使得其在军事和民用中的应用越来越广泛,遥感图像目标检测制约了遥感技术的应用。基于LS-SVM算法,建立了遥感图像目标检测方法,同时将其应用于舰船遥感图像和航空遥感图像目标检测中,并将检测的结果与改进SSD算法、联合显著性特征和角度信息方法进行对比。结果表明,基于LS-SVM的遥感图像目标检测方法能够更好地对比较暗、尺寸比较小的目标进行检测,提升了遥感图像的目标检测准确率。该研究对遥感图像目标检测具有一定的参考价值。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
北京航空航天大学学报(2022年6期)2022-07-02
汽车工程师(2021年12期)2022-01-17
高技术通讯(2021年3期)2021-06-09
舰船科学技术(2021年12期)2021-03-29
当代陕西(2020年14期)2021-01-08
自动化学报(2017年5期)2017-05-14
贵州师范学院学报(2016年4期)2016-12-01
光学精密工程(2016年1期)2016-11-07
舰船科学技术(2016年1期)2016-02-27