无人船水上水下一体化测量系统在水域调查测绘中的应用
2023-05-06 08:54严佩娟许军明
资源导刊(信息化测绘) 2023年3期
严佩娟 许军明
(1.宁波市鄞州区水利水电勘测设计院,浙江 宁波 315000;2.浙江省工程勘察设计院集团有限公司,浙江 宁波 315000)
1 引言
为了发挥和维护水域在供水、防洪、排涝、生态环境等方面的作用,全面推进水域监管数字化转型,浙江省开展了新一轮水域调查工作。水域调查需要测绘池塘、水库、河道、山塘、湖泊、蓄滞洪区、人工水道等水域及其岸基空间数据和基础信息[1]。常规水域调查测绘需将水上和水下部分分开作业,水下测量一般借助于载人或无人测量船搭载单波束和多波束测深仪、侧扫声呐设备采集水深数据;水上部分通常采用航空摄影测量或全野外数字化测绘技术成图。这种水上水下分开作业的方式存在工作效率低、劳动强度大、坐标基准不统一、精度不一致,以及水陆交接处通常留有大量施测盲区,测量成果难以实现水陆地形的无缝拼接等弊端[2]。近年来,智能无人船艇技术的发展日趋成熟,由其搭载多种高精度传感器进行水上水下一体化地理信息数据采集成为现实。该技术可以快速、高精度地获取水下及水陆交界处地物地形的三维点云数据,再利用专业软件进行融合处理,可实现水上水下一体化成图,已广泛应用于三维航道扫测、海岸带、湖泊水库、坝体、岸堤、河流港口调查等领域。
2 系统组成
以武汉世隆科技有限公司生产的SL-M 多波束3D双体无人船移动水文测绘系统为例,集成激光采集系统、多波束测深系统、导航与定位GNSS 设备等多种传感器,实现水上水下一体化的数据采集、数据建模和数据处理,系统构成如图1 所示。

图1 无人船水上水下一体化测量系统构成
(1)无人船系统。无人船系统是整个系统的载体,船体采用稳定性高的双体船设计方式,使用三维电子陀螺仪测定船体实时三维姿态,通讯组件、动力及驱动模块、导航与定位GNSS 设备及姿态测量与控制模块通过串口、RJ45 或自定义协议与ARM 嵌入式控制模块相连接[3]。ARM 控制模块通过计算当前位置与规则线差异,调整两电机的速度,从而实现对船只的控制,控制准则结合国家对水下地形测绘等范围的要求,保证测量数据的有效性。ARM 控制模块可读取、记录三维电子陀螺仪的实时数据用于航向控制,同时通过归算改正GNSS 接收天线与传感器间的偏距。ARM 控制模块可实现人工手动控制、实时规划线、目标点自动控制及无链接自主测量控制四种模式。无人船支持两套通讯模式,一是基于WiFi 的两公里短距离通讯模式,该模式可支持丰富的图像和音频实时通讯,二是10 公里长距离电台通讯模式。岸基控制平台可通过通讯设备向ARM 控制模块发送指令,下达测量任务或走行命令。
(2)数据采集系统。数据采集系统是无人船测量系统的核心,测量人员通过操控岸基控制平台,系统即可自动采集并记录水下水上点云数据[4]。系统同时搭配先进的三维激光扫描仪、多波束测深仪、组合导航系统,其中三维激光扫描仪整体性能达到水上100 万点频,扫描距离最远可达1000m,精度可达4cm@500m,且可提供100°开角的扫描视场,能够满足水上复杂作业情况的需要。多波束测深仪可达到水下300 米的测深范围,姿态横滚和俯仰精度达到0.005°,航向角精度达到0.015°,多波束探头可整体偏转30°,提高水下点云数据采集的覆盖度,保障水上水下点云拼接的一致性,并能精细化反映水下地形及构筑物的纹理。组合导航系统选用的GNSS 设备采用了可支持GPS、GLONASS 以及中国北斗系统的接收机,接收机开通了RTK(Real Time Kinematic)功能,可支持多种格式的差分数据,以实现高精度的导航定位。
3 工程实例
3.1 工程概况
为贯彻落实省、市“五水共治”工作总体部署和碧水行动实施计划,宁波市鄞州区加快推动全区河道、湖泊、山塘、水库、蓄滞洪区、人工水道等主要水域基础信息、空间信息和工程信息的调查工作。寨基水库位于东钱湖镇郭家峙、东村、俞塘村境内(测区卫星影像如图2 所示),本次调查需要对库区水上水下地形进行测绘。宁波市鄞州区水利水电勘测设计院尝试将SL-M 多波束3D 双体水文测绘无人船系统应用到该调查项目,主要任务是通过水上水下一体化测量,获得水库周边完整精准的水上水下一体化三维模型,为库区水域保护规划提供最现势的地理信息数据。

图2 测区卫星影像
3.2 作业方案
无人船下水后首先与岸基控制平台连接,通讯正常后接入ZJCORS 系统,并检查各种设备的工作状态是否正常;利用系统配套软件设置无人船的作业参数,通过调节输出频率、波长、发射功率、发射开角等系数使系统达到最优状态。本项目的水下测线布设如下:主测线布设方向垂直于水库横向中心线,各测线布设尽量平行,测线间距20m,定位点间距为5m,重点区域加密补充测线。外业数据采集完成后,在PC 端利用配套的多源数据融合处理软件对数据进行处理,完成对三维激光点云数据、测深数据、全景影像数据的集成、配准、融合和定位测图。为检查无人船水上水下一体化测量精度,项目通过布设水下检测线和50 个水上检核点的方式进行实地验证。水下检测线根据《水利水电工程测量规范》(SL197-2013)的要求布设,需垂直于主测线,长度约为主测线总长度的5%左右;水上检核点采用实地测量坐标比对的方式进行检查。
3.3 数据采集
水下部分数据采集包括位置信息、水深信息、姿态及表面声速,采集过程中航线尽量与测线一致,航线速度保持一致,当航行到一段测线尽头后才能停止该段数据的采集,航行至下一段测线外时开始采集下一段测线数据,直至设置范围内所有测线的数据采集完毕。采用区域动态实时差分作业模式确定区域平面控制基准,依照等角模式或等距模式采集水上数据,根据激光扫描仪垂直扫描开角确定扫测距离,围绕测量对象由近及远中低船速扫描,实现岸基全覆盖点云数据采集。
3.4 水上水下部分数据处理
水下数据处理前,首先检查数据处理软件的投影参数、椭球体参数、坐标转换参数、各传感器的位置偏移量、系统校准参数等相关数据的准确性,根据需要对水深数据进行声速改正、潮位改正;随后检查每条测线的定位数据、罗经数据、姿态数据和水深数据。根据水底地形、陆地近岸地形数据的质量设置合理的参数滤波,经线模式编辑、子区编辑等人机交互处理后,抽稀水深,对特殊水深点应从作业区域、回波个数、信号质量等加以判读、分析。数据经编辑及改正后,应再次综合检查所有数据。最后根据制图比例尺和数据用途对水下数据进行处理,输出成果以备综合利用。
水上激光点云数据处理主要是飞点去噪处理,对于明显远离点云的,漂浮点云上方的稀疏、离散的点,远离点云中心、小而密集的点云,扫描时测区控制不可能完整控制,通常会比原定扫描区域大,从而形成多余扫描的点云和正确点云混在一起的噪声点,通过可视化交互、滤波器及基于最小二乘算法进行删除[5]。对剔除后的点云数据压缩,基于散乱点云简化压缩的方法很多,本次任务主要运用距离阀值法、曲线检查法与采样法进行压缩,压缩后的数据进行全局配准处理,最终得到水上点云数据成果。
利用系统配套的数据建模和数据处理软件合并水上水下点云数据,并检查处理过程中由于水位升降造成的水面分界处的点云重叠和空白区,最终形成包含水域周边陆地和水下地形的点云数据(如图3 所示)。利用此成果可以形成多种测绘产品,如水上水下一体化数字高程模型(DEM)、水上水下一体化地形图(如图4 所示)等。

图3 水上水下点云拼接效果

图4 水上水下一体化地形图
3.5 精度检查
(1)水下点位精度检查。水下点位精度通过布置水下检测线的方法进行实测检查,检测线垂直于主测深线,长度大于主测深线总长度的5%。经检查,检测线与主测深线相交处图上1mm 范围内水深点,高程最大差值均小于0.2m,随机抽取100 个水下点位作为样本点来统计测深点的高程误差,统计结果如表1 所示。

表1 水下点位精度检查
(2)水上点位精度检查。利用50 个水上检核点对无人船系统测量的水上地形精度进行检测和分析,选取路灯、水库堤坝护栏拐角处、电线杆等明显且易人工测量的特征点作为检核点。利用GNSS-RTK 实测这些检核点的坐标,将测量结果与在水上三维点云模型中量取的坐标值进行比较,从中随机抽取10 个点作为样本点,样本点的统计结果如表2 所示。
从表2 可以看出,10 个样本检核点的平面位置中误差为0.012m,高程中误差为0.026m,满足《水利水电工程测量规范》(SL197-2013)中的相关精度要求。
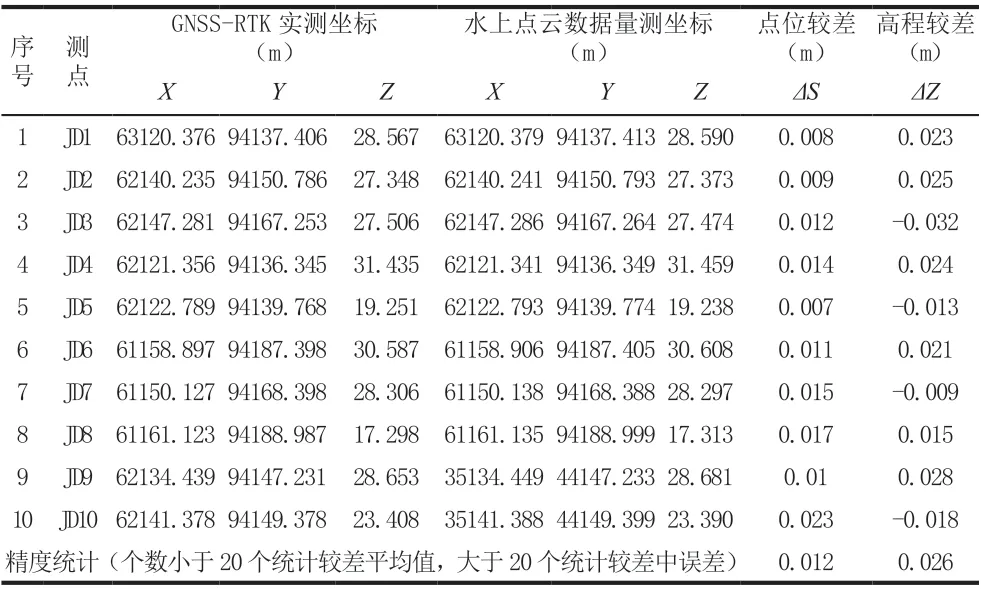
表2 GNSS-RTK实测坐标与水上点云数据量测坐标对比
4 结束语
本文应用无人船水上水下一体化测量系统顺利完成寨基水库调查测绘工作,经检验,数据精度符合设定要求,水下地形成果可与陆地测绘成果无缝衔接,实现了水上水下地形数据的快速、精准和同步采集目标,解决了传统测绘方法水陆交接区域数据覆盖完整度低的问题。该系统的成功应用对于水域调查基础测绘数据的完整覆盖、水陆地形数据库建设有重要意义。
猜你喜欢
地下水(2021年6期)2021-04-03
水上消防(2020年5期)2020-12-14
文史春秋(2019年11期)2020-01-15
通信技术(2019年3期)2019-05-31
智能城市(2018年7期)2018-07-10
电子测试(2018年6期)2018-05-09
地理空间信息(2017年5期)2017-07-05
声学与电子工程(2017年1期)2017-06-22
四川师范大学学报(自然科学版)(2015年4期)2015-02-28
水利规划与设计(2014年2期)2014-02-18