
快速迭代收缩阈值正则化改进算法在桥梁移动荷载识别中的应用研究
2023-05-05 08:17陈震孙梦晴陈璐郭丰李晓克
华北水利水电大学学报(自然科学版) 2023年1期
陈震, 孙梦晴, 陈璐, 郭丰, 李晓克
(1.华北水利水电大学 土木与交通学院,河南 郑州 450045; 2.中国建筑第七工程局有限公司,河南 郑州 450004)
移动荷载识别属于结构动力学反问题范畴,具有典型的不适定性,即其解的稳定性、唯一性和存在性不能同时满足。由于车辆动荷载不断变化,直接测量车辆与桥梁之间的相互作用力往往难以实施,故根据实测桥梁动力响应来反演桥面移动荷载的方法是一种行之有效的手段。迭代收缩阈值类稀疏正则化求解方法是反问题求解中较有前景的计算方法之一,其中迭代收缩阈值算法(Iterative Shrinkage Threshold Algorithm,ISTA)被广泛应用于线性逆问题求解及压缩感知重构算法中。
近年来,计算理论的发展极大地推动了移动荷载识别方法的发展。为了提高识别结果的稳定性和准确性,许多研究者做了大量工作。赵瑜等[1]提出一种通过建立ARMA模型来辨识结构工作模态参数的方法,在激励数据未知时,基于ARMA模型的模态参数辨识法能够准确地识别出系统的模态参数。杨慧等[2]采取BP神经网络对桥梁的动应变进行训练,该方法可以快速识别车辆参数,但对训练算法有较高的要求。针对移动荷载识别系统矩阵存在的不适定性,陈震等[3-4]通过研究得出,在迭代算法的基础上结合改进的Gram-Schmidt正交化在保证识别精度的前提下可以减少迭代次数。WANG L J等[5]利用矩阵摄动法将移动荷载识别转化为一系列确定的逆问题,提出一种用于识别移动荷载的快速迭代收敛法,该方法可有效提升算法的收敛速度。徐家云等[6]采用振型分解法求解车桥耦合振动动力方程,通过求解荷载脉动系数识别重载列车荷载。一般的桥梁动态称重系统采用桥梁影响线计算静态轴重,而忽略了动力效应的影响,张伟超等[7]采用一阶正则化和动态规划法对不同类型的车辆种类进行荷载识别得出,基于移动荷载识别理论的动态称重系统能有效利用结构动力信息识别移动车辆荷载。PAN C D等[8]提出移动时间窗的概念来降低矩阵维数,同时结合矩阵正则化有效节省了荷载识别时间。邓露等[9]探讨了桥梁动态称重在不同类型桥梁上的适用性,并且指出路面平整度和噪声会对识别效果产生不利影响。
本文采用一种快速迭代收缩阈值正则化改进算法(Iterative Regularization Improved Fast Iterative Shrinkage Threshold Algorithm,IRFISTA)求解移动荷载识别问题。通过引入迭代正则化,准确提取动态荷载的信号特征,以期在不增加计算量的前提下,提高ISTA算法的收敛速度。
1 基本理论
1.1 时域法识别移动荷载
以时域法为基础,建立车辆荷载与桥梁响应力学映射关系,构造车-桥系统方程。以简支梁为例,假设忽略梁的转动惯量和剪切变形,桥梁跨长为L,单位密度为ρ,黏性阻尼比为C,抗弯刚度为EI,模型简图如图1所示。

图1 简支梁移动车辆荷载识别模型
假设有一车辆移动荷载P(t)以速度c从梁的左端支座向梁的右端移动,则梁的振动微分方程可表示为:

(1)

利用模态叠加原理和卷积基本知识,在时域内求解式(1),得到梁桥在t时刻距梁左端a处的弯矩响应为:
(2)


(3)
2ξnωnω′ncos[ω′n(t-τ)]}。
(4)
采用时域法识别移动荷载时,荷载识别方程最终可写为如下形式:
Ax=b。
(5)
式中:A∈Rm×n为车桥系统矩阵;b∈Rm×1为车桥系统响应,即加速度响应、弯矩响应经过离散化形成的向量;x∈Rn×1为离散的移动荷载向量。
1.2 迭代收缩阈值算法
迭代收缩阈值算法是求解线性逆问题的经典方法,隶属于梯度类算法,其求解过程简单便捷,可用于求解大规模不适定问题。当求解L1正则化问题时,该方法可利用当前点的信息进行迭代值的更新。
ISTA的求解步骤为:
xk+1=Sα(xk-2tkAT(Axk-b))。
(6)

Sα(e)i=sgn(ei)S(|ei|-α)+。
(7)

min(F(x))=f(x)+g(x)。
(8)
式中:f(x)是连续可微凸函数;g(x)是连续凸函数。对于任意两点x1、x2。RN满足下式:
(9)
式中:L(f)为李普希兹常数;对于任意L>0的数值,采用上式求解式(8),即可得到近似目标函数QL(x1,x2):
(10)
进而得到极小值点GL(x2)为:
(11)
由此可求得式(8)的迭代解为:
xk=GL(xk-1)。
(12)
1.3 快速迭代收缩阈值正则化改进算法
ISTA计算简便,但同时存在迭代速度慢、计算精度低的缺陷。为此,本文在其基础上进行正则化改进,通过在ISTA中引入加速因子yk+1,可得:
(13)

通过引入式(13)形成快速迭代收缩阈值正则化改进算法。该算法的迭代步骤为:
1)选取迭代初始解,首先给出迭代初始解的预估值:x=ATb,取阈值参数t1=1,迭代终止条件取为Tol;
2)采用式(12)对ISTA算法加速收敛,对ISTA算法进行正则化改进:
xk+1=Sα(xk)=Sα(yk-AT(Ayk-b))。
(14)
3)判断‖xk+1-xk‖≤Tol是否满足,如不满足返回第2步重新求解。
ISTA求解的迭代值xk仅依赖于前一次的迭代值xk-1。IRFISTA求解的迭代值xk+1不仅依赖于前一次的迭代值xk,还依赖于次迭代值xk和xk+1的线性组合。桥梁移动荷载的识别误差主要是由环境噪声和大型车桥系统矩阵的不适定性引起的,改善识别方法的鲁棒性和抗不适定性是提高移动荷载识别精度的有效手段。本文基于正则化改进的思想,在提高算法计算效率的前提下,通过引入正则化改进,有效提升了新算法的鲁棒性和抗不适定性,进而实现桥梁移动荷载识别精度的提高。
2 数值仿真
以单跨简支梁为例,梁长L=40 m,梁的单位长度密度ρ=12 000 kg/m,梁抗弯刚度EI=1.28×1011N·m2;数值计算分析频段取0~50 Hz,采样频率取为200 Hz。桥梁前三阶段固有频率分别为3.2、12.8、28.8 Hz。车轴轴距为8 m,车辆匀速通过简支梁,车速c=40 m/s。通过测量车辆行驶时简支梁动力响应识别桥梁移动车载,进而评价IRFISTA的有效性。移动车载前轴和后轴动态荷载真实值分别设为:
(15)
在识别过程中,采用相对误差百分比(Relative Percentage Error,RPE)来评价荷载识别精度:
(16)
式中:Pidentified表示识别荷载;Ptrue表示真实荷载。
2.1 时变移动荷载识别
将本文提出的IRFISTA应用于桥梁移动荷载识别,并将其与ISTA识别结果进行比较。数值模拟过程中考虑3类噪声水平(1%、5%、10%)的干扰,荷载识别结果见表1,表1中 “a”代表加速度响应;“m”代表弯矩响应;1/4和1/2表示测点位于桥跨的1/4L和1/2L位置处;1/4a&1/2a表示采用1/4跨处的加速度响应和1/2跨处的加速度响应作为输入响应进行移动荷载识别,1/4a&1/2a&1/2m表示采用1/4跨处的加速度响应、1/2跨处的加速度响应、1/2跨处的弯矩响应作为输入响应进行移动荷载识别。当误差值大于100%时相对误差百分比用“-”表示。带下划线数据为IRFISTA计算的识别误差,无下划线数据为ISTA的识别误差。

表1 ISTA与IRFISTA识别误差比较
由表1知:随着噪声水平的提高,ISTA识别误差增大明显,而IRFISTA识别误差略有增大;两种不同工况组合下的IRFISTA识别精度均高于ISTA的,表现出良好的抗噪性能。
图2和图3分别给出了1%和10%噪声水平下,ISTA和IRFISTA在加速度响应表1中工况1下两轴车载的识别结果。由图2和图3可知,当单独采用加速度响应识别移动车载时,IRFISTA所识别的荷载与真实荷载的拟合度更高。

图2 1%噪声下ISTA与IRFISTA对两轴车载的识别结果(工况1)

图3 10%噪声下ISTA与IRFISTA对两轴车载的识别结果(工况1)
图4和图5分别比较了1%和10%噪声水平下ISTA和IRFISTA在加速度响应和弯矩响应组合表1中工况2下两轴车载的识别结果。当测量响应数据增加后,两种算法在工况2的识别精度较工况1的均略有增加,且IRFISTA的荷载识别结果较改进前的ISTA的有明显优势。数值仿真结果表明:通过引入正则化改进,IRFISTA有效提升了ISTA的鲁棒性和抗不适定性,进而实现桥梁移动荷载识别精度的提高。

图4 1%噪声下ISTA与IRFISTA对两轴车载的识别结果(工况2)
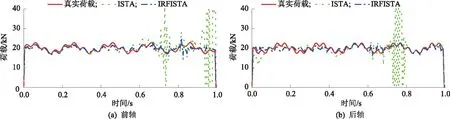
图5 10%噪声下ISTA与IRFISTA对两轴车载的识别结果(工况2)
2.2 收敛效率比较
由于车桥系统矩阵A为大型稀疏矩阵,通常难以计算其李普希兹常数。文中提出的新算法通过引入加速步骤以极少的额外计算量提高了收敛速度,使得ISTA的收敛速度从O(1/k)提升为O(1/k2),改进算法有利于提升荷载识别效率。
图6对比了5%噪声水平下,ISTA和IRFISTA在1/4a&1/2a&1/2m时函数值误差。由图6可知,与ISTA相比,IRFISTA的收敛效率更高且稳定性更好,说明该算法在识别移动荷载时具有更高的识别效率。

图6 ISTA与IRFISTA迭代效率比较
3 结论
基于移动荷载时域识别理论和ISTA特征,提出采用迭代正则化改进ISTA识别桥梁移动荷载,提出一种新的算法IRFISTA。数值计算结果表明:
1)IRFISTA在抗噪性能、识别精度等方面较ISTA有明显的提高。改进后的IRFISTA在保持原有算法简单性的前提下,实现了更精确地识别桥梁移动荷载。
2)两种算法的识别效率均与迭代次数相关,针对ISTA收敛速度慢的特点,通过引入加速步骤以极少的额外计算量提高了收敛速度,改进后的IRFISTA具有更高的识别效率。
3)对于移动荷载识别中最关注的识别精度和识别效率两个方面,改进算法较ISTA有明显提升。但当环境噪声干扰较大时,在移动荷载时程的局部区域,IRFISTA识别荷载与真实荷载仍有一定的偏差,后续需针对该方法开展更深入的研究和探讨。
猜你喜欢
当代水产(2022年6期)2022-06-29
铁道通信信号(2020年8期)2020-02-06
数学年刊A辑(中文版)(2019年1期)2019-01-31
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
数学杂志(2018年5期)2018-09-19
劳动保护(2018年8期)2018-09-12
中国公共安全(2017年11期)2017-02-06
电源技术(2015年2期)2015-08-22
数学年刊A辑(中文版)(2014年5期)2014-11-01
