基于远程监控三区移动平均窗口法的重型车排放特征
2023-04-29 00:44任烁今张超李刚李腾腾于全顺关敏吉喆景晓军
汽车安全与节能学报 2023年3期
任烁今 张超 李刚 李腾腾 于全顺 关敏 吉喆 景晓军


关键词:重型车;实际道路排放;移动平均;远程监控;功基窗口法
重型商用车一直以来都是排放监控的重点。根据生态环境部《2022年中国移动源环境管理年报》,2021年全国柴油车的氮氧化物(NOx)和颗粒物(particulatematter,PM)的排放分别占汽车排放总量的80%和90%以上[1]。
为了更好地对重型车排放进行管控,中国重型车六阶段排放标准[2]中增加了排放远程监控及实际道路行驶测量方法。其中,排放远程监控要求车辆在全寿命周期内安装车载终端,并按要求进行数据发送,并由生态环境主管部门和生产企业的远程平台进行接收。孙一龙等[3]的研究发现,远程监控获得的数据及排放值与试验测试的数据一致性较好。2021年生态环境部发布重型车排放远程监控技术规范[4],进一步对相关技术要求进行说明。目前远程数据存在数据质量不高、数据应用模型进展缓慢等问题[5]。
如何利用远程平台接收的排放大数据建立监控模型,实现对车辆排放水平的有效监控是目前的研究重点[6]。合肥工业大学的程晓章等[7]研究发现:NOx排放受车辆速度和加速度的双重影响,将远程监控的NOx排放划分为4种工况,并通过统计学原理进行筛选从而识别高排放柴油车。上海工程技术大学的徐为标[8]等提出了由NOx浓度分布特征驱动的高排放车辆识别算法,通过系统聚类法对车辆NOx排放进行聚类。江淮汽车的张新宇等[9]基于远程数据,提出了选择性催化还原(selectivecatalyticreduction,SCR)转化效率算法、用户行为对SCR影响分析方法、SCR硫中毒、碳氢中毒的判断方法。
另一方面,实际道路行驶测量采用便携式排放测试系统(portableemissionmeasurementsystem,PEMS)按照特定的工况比例进行车辆的实际道路排放测试,并参考欧洲标准采用功基窗口法(work-basedwindowmethod,WB-WM)进行排放结果核算及判定。在WB-WM中,要求有效窗口的窗口平均功率大于10%。因此,這种方法对低负荷工况的排放不能进行很好的监控,同时对于部分试验结果,如果有效窗口比例较低,会牺牲较大比例的测试数据,测试工况也不能很好地与车辆实际运行情况对应。
北京理工大学吕立群等[10]研究结果表明:现行WB-WM在排放评估过程中最高可剔除46.68%的NOx高比排放窗口,大幅低估了实际道路工况尤其是市区拥堵路况下的重型柴油车NOx实际排放量。欧盟委员会联合研究中心的P.Mendoza-Villafuerte等[11]的研究结果中,高达85%的NOx排放结果未纳入结果计算。
目前,国际上也开始对这种测试方法进行改良和升级。中国汽车技术研究中心的张潇文等[12]提出了一种适用于PEMS测试的基于油耗的窗口划分方法,这种方法的NOx排放偏差较WB-WM能够降低6%。
美国西南研究院的C.Sharp等[13]通过大量数据分析发现:小于20%负荷的工况在重型车的运行中占有较高的比例。因此,美国加州空气资源委员会(CaliforniaAirResourcesBoard,CARB)于2020年通过超低NOx排放法规,其中提出了低负荷循环(lowloadcycle,LLC)的要求和一种新型的重型车排放监控方式,即三区移动平均窗口(three-binmovingaveragewindow,3B-MAW)法[14]。这种方法采用300s固定时长的移动窗口,根据每个窗口CO2排放量计算对应的负荷比,并根据负荷比将逐秒移动的窗口划分为怠速区、低负荷区和中高负荷区,并对3种区的排放限值进行了要求。
美国西弗吉尼亚大学(WestVirginiaUniversity,WVU)的G.Sadek[15]研究发现3B-MAW方法中的低负荷区和中高负荷区存在NOx与CO2之间的权衡取舍(trade-off)关系。3B-MAW方法能够较好地对应发动机排放循环,例如低负荷区对应LLC循环,中高负荷区对应联邦测试循环(federaltestprocedure,FTP)和跳变模式循环(rampedmodecycle,RMC)。因此,相对于目前的WB-WM能够更好地对低负荷工况进行监控。综上,3B-MAW方法能够有效提升排放数据使用效率并对低负荷工况进行有效监控。
本文将3B-MAW方法应用于排放远程监控数据分析,并通过6辆不同类型的重型车远程监控数据对数据清洗、模型特性、参数影响、排放结果进行了研究分析,最终通过实车道路排放试验与WB-WM进行了对比研究。
1远程监控3B-MAW模型
1.1计算模型
本文提出的重型车排放远程监控3B-MAW计算模型如图1所示。
计算步骤为:
步骤1:输入监控平台数据。以远程监控平台每辆车的日监控数据作为输入,若数据量不够则逐日向前递补。
步骤2:数据清洗。对远程监控数据进行筛选和剔除,有效数据筛选条件见本文2.2节。
步骤3:移动窗口负荷比计算。对有效数据划分移动窗口,计算依据见本文3.1节。各移动窗口的负荷比为
其中:MCO2为该车型依据GB17691-2018附录L的CO2测试结果;Pmax为该车发动机的额定功率;twin为移动窗口的时长,推荐为300s;Δt为采样间隔,对于远程监控为1s;m˙CO2为车辆的CO2瞬时质量排放,对于柴油车,为
式中:qv为发动机燃料体积流量,单位为L·h-1,为远程监控上传数据项;ρd为柴油密度,单位为g·L-1;44为CO2的相对分子质量;柴油中碳氢质量比采用12:1.86。
步骤4:3区划分。根据步骤3计算的窗口负荷比将每个移动窗口划分成不同的类型。λ≤6%的窗口划分为怠速区,6%<λ≤20%的窗口划分为低负荷区,λ>20%的窗口划分为中高负荷区。
步骤5:确认每个区的累计窗口数量大于等于要求的最小窗口数nmin=2400,否则增补前一日数据,返回步骤1。
步骤6:对于低负荷区和中高负荷区,比排放为
式中:Ea,b为该区的比排放,单位为g·(kWh)-1;角标a代表排放物,可以为HC、CO、NOx和PM,针对目前的远程监控要求一般指NOx;角标b代表区的类型,可以为低负荷区或中高负荷区;nb为b区的窗口数量,nb≥nmin;m˙a为排放物的瞬时质量排放,单位为g·s-1。
步骤7:核查3区的排放是否超过限值(限值的讨论见本文3.3节)。如果存在超过排放限值的区,则记为当日排放超标,返回步骤1计算下一日排放情况。
步骤8:如果该车的超标日占比大于x%,则认定该车为疑似超排车辆。0<x<100,可根据实际监管需要进行选择,不在本文讨论范围内,不影响本文结论。
1.2模型特点
通过上述描述,可以获知3B-MAW计算模型的以下特点:
1)适合于车辆实际行驶排放水平的核查,对行驶工况和窗口移动方向没有要求。
2)以CO2排放表征负荷比,监测负荷范围较广,不用考虑载荷情况。
3)数据清洗之后,即使数据不连续也可以应用于计算,提高数据使用效率。
2车辆选择及数据清洗
2.1车辆选择
本文用于模型研究的远程监控数据主要来源于表1所示的6辆重型车,覆盖了货车、牵引车和客车不同的车辆类型、质量和功率水平。每辆车均选取了连续四周的远程监控数据,由于车辆使用频率不同,因此数据总量存在不同,牵引1的数据量最大,约267h。车辆的远程监控均按照国6排放标准通过车载终端进行无线发送并通过软件平台进行接收和记录,车辆的行驶工况和载荷等条件为日常的运行条件(交通状况随机)。
2.2数据清洗
对每辆车的远程监控数据均进行了数据清洗,有效数据的筛选原则如下所示:
1)车辆行驶海拔小于2500m,即大气压力近似大于74kPa(国六排放标准PEMS试验条件);
2)发动机处于非停机状态,即发动机转速大于500r/min(发动机熄火状态无排放);
3)发动机处于热机状态,即冷却液温大于70℃(国六排放标准PEMS试验数据分析条件);
4)车辆NOx传感器能够正常传输有效的NOx排放值(露点检测过程中无NOx有效值)。
以货车1的2400s运行数据为例,图2给出了有效数据和无效数据的分布情况。可以看出,在车辆停止一段时间后,发动机冷却液温度有可能低于70℃,车辆未完全热机,将此时的数据予以剔除。当水温升高至70℃以上之后,NOx传感器仍需要一段时间才开始传输有效数据,此时无效的NOx数据也需要进行剔除。
图3所示为所选6辆重型车的数据删除情况统计。可以看出,由于转速小于500r/min被删除的数据比例最小。而对于货车1和牵引1,比例则分别高达17.5%和22.6%,原因是这些车辆虽然发动机已经停机,但车辆未下电使得车载终端仍一直传输数据,而这些数据并没有分析的必要性,因此需要被剔除掉。由于水温小于70℃和NOx传感器未正常传输数据导致被删除的数据比例与车辆的实际行驶工况有关。总体来看,依据上文的有效数据筛选原则,平均约32.1%的数据被剔除掉。
3计算结果及讨论
3.1模型特性研究
以货车1的3600s数据为例,图4所示为的车速和计算负荷比随时间的变化情况。负荷比曲线上每一点代表的为该点之后300s移动窗口的负荷比计算结果,如图中方框区域所示。可以看出,负荷比曲线变化与车速曲线有一定相关性。根据CARB文件[14],采用CO2排放计算负荷比相对于传统PEMS试验采集车载诊断(OBD)负荷数据更为准确,原因是车辆OBD负荷数据在小负荷时并不准确。
从图4中可以看出,每个数据点会被连续的300个移动窗口所包含,而随着移动窗口负荷比的变化,每个数据点有可能落在1种、2种或3种区内。
圖5所示为不同车辆的数据点落在不同区的比例情况。可以看出,数据点同时落在3种区内的可能性较小。而数据落在几种区内和车辆的行驶工况和加载情况有关。行驶工况越单一,比如大重量的货车、牵引车和客车,则数据点落在1种区内的比例更高。
如图6所示,从移动窗口三区划分比例可以看出不同车辆的日常运载和驾驶情况,例如货车1、货车2和牵引2的中高负荷区移动窗口比例均大于50%,说明它们平时的运载量较大或平均行驶车速较快。而对于货车3、牵引1和客车1,低负荷区的移动窗口比例则较高。
图7和图8分别给出了各区的平均车速和平均排温。由于三区的划分主要依据为窗口负荷比,因此随着窗口负荷比的增加,窗口平均车速和平均排温(SCR入口温度)也呈上升趋势。
对于本文研究车辆,怠速区、低负荷区和中高负荷区的平均SCR入口温度分别为186.7、253.6、310.3℃。而SCR的NOx转化效率在180~300℃范围内是随着催化器温度升高而升高的。这在本文3.3节的排放对比中可以看出,中高负荷区的NOx比排放更有可能低于低负荷区。因此,3B-MAW模型可以较好地反映车辆在不同负荷下的运行特征。
3.2模型参数研究
从1.1节计算模型的描述过程中可以看出,三区移动平均窗口计算模型有4个主要的控制参数,分别为最小窗口数(默认nmin=2400),窗口宽度(默认twin=300s),怠速区和低负荷区的划分线(第1划分线,默认值为6%)以及低负荷区和中高负荷区的划分线(第2划分线,默认值为20%)。本节研究了各主要控制参数对计算结果的影响和选取依据。
1)最小窗口数。
通过最小窗口数的设定,一方面可以对多个窗口的排放结果进行平均计算,从而进一步考核车辆的排放情况,另一方面可以有效控制计算的数据量。
如图9所示,当窗口数量小于2400时,由于进行平均计算的窗口数量较少,因此部分试验样车的三区排放计算结果浮动较大。而在窗口数量大于2400后,大部分车辆的三区排放计算结果变化趋势相对较为平缓,而对于某些车辆(如牵引车2和客车1)仍存在一定程度的浮动。
如图10所示,随着窗口数量的增加,完成三区计算的总数据量(清洗后)快速上升。尤其是对于怠速区,由于车辆在行驶过程中落入怠速区的比例较低(见图6),因此完成怠速区计算所需的数据上升较快。从表3中可以看出,车辆平均每日的运行时长在2~10h左右。
因此,为了尽可能保障采用当日的数据完成模型计算,窗口数量要求不宜过多。结合图9分析结果,因此设置最小窗口数为2400,既可以获得较为稳定的排放结果,又不会导致完成模型计算所需的数据量过多。
2)窗口宽度。
本模型采用固定时间宽度的移动窗口,根据美国CARB报告[16],300s的窗口宽度相对目前美国NTE(non-toexceed)测试的30s窗口可以提供更好的滤波效果,而又不会太长导致失真[14]。
如图11所示(窗口数量固定为2400),在窗口宽度小于200s时,由于窗口过窄,对排放数据的滤波效果不明显,因此大部分车辆的排放变化较快。而当窗口宽度大于400s后,由于窗口过宽,包含的工况波动较大,开始出现失真的波动情况。而在窗口宽度在200~400s之间,大部分车辆的排放结果均相对较为稳定。
图12所示(窗口数量固定为2400),窗口宽度对怠速区和中高负荷区排放计算数据量影响较大。原因是当一个移动窗口中每秒的运行负荷均比较低或者均比较高时,才会被划分成怠速区或中高负荷区,随着窗口宽度增加,窗口包含的工况变化也更多,出现符合一直较低或较高的概率也越来越低,因此需要更多的数据来达到模型要求的最小窗口数。例如,对于牵引1和客车1,从图6中可以看出二者的工况中高负荷区比例较低,因此随着窗口宽度增加,二者累计2400个中高负荷区所需的数据量也快速上升。因此,与最小窗口数的分析类似,为了尽可能减少模型计算所需的数据量,窗口宽度不应该过长,300s是较为适宜的数值。
3)负荷比划分线。
根据美国CARB报告[16],第1划分线设置为6%的原因是与LLC循环的测试结果相对应(LLC负荷比一般为5~7%)。从模型原理来看,第1划分线主要影响怠速区和低负荷区的划分及计算。如图13所示,当第1划分线小于6%时,窗口落入怠速区的概率迅速减小,导致完成模型所需的计算量快速增加。当第1划分线大于6%时,完成低负荷区计算的数据量也成上升趋势。因此,从低负荷循环要求和所需数据量两个方面考虑,第1划分线定在6%左右较为合理。
第2划分线根据FTP循环的平均负荷比确定,约为20%[16]。与第1划分线的原理类似,第2划分线主要影响低负荷区和中高负荷区的划分与计算。如图14所示(窗口数量固定为2400),当第2划分线在20%附近时,中高负荷和低负荷区的所需数据量基本都控制在3h以内。当第2划分线从20%升高或降低时,中高负荷区和低负荷区的计算数据量分别快速上升。因此,第2划分线选为20%可以获得数据需求量上的最小化。
3.3排放结果
如表2所示,美国CARB报告[14]中提出三区移动平均窗口模型的限值,该限值为一致性系数(conformityfactor,CF)与对应循环工况限值的乘积,而且CF和工况限值会随着时间推移继续加严。WVU的G.Sadek在其研究中提出了2010年和2024年的2种推荐限值。
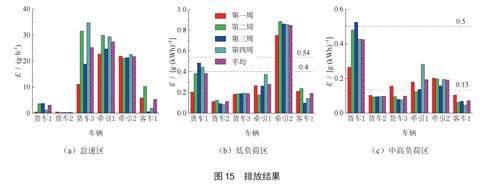
如图15所示,不同车辆怠速区的排放流量计算结果差异较大,从0~40kg/h均有分布,因此在未来的排放标准有必要对怠速区进行专门的排放限值要求。中高负荷区的比排放接近或低于低负荷区,原因是中高負荷区的后处理温度更高(见图11),对NOx的转化效率更高。对于低负荷区,除了牵引2排放较高外,其余车辆的排放结果基本控制在0.5g/kWh以下,和2024年CARB(0.54g/kWh)及WVU(0.4g/kWh)的限值较为接近,但考虑到国内尚未提出针对低负荷区的排放要求,可以适当放宽其限值。对于高排放区,货车1的排放结果要明显高于其他车辆,其余车辆的排放基本在0.3g/kWh以下,若不考虑在用车劣化系数,部分车辆与2024年CARB的0.13g/kWh要求尚存在一定距。
4与WB-WM对比研究
本文选取了5辆试验样车,样车参数及测试工况如表3所示,其中样车1—样车3采用GB17691-2018重型车六阶段标准中要求的PEMS测试工况进行试验,样车4、样车5采用接近实际运行的随机工况进行试验,每辆试验样车通过远程监控获取车辆的运行数据。
如前文所述,WB-WM和3B-MAW法的主要区别在于对低负荷工况的考核以及排放数据的分析方法,以下从这两个角度对二者的适用性和限值严格程度进行了分析。采用WB-WM计算了有效窗口(平均功率大于发动机最大功率的20%)和所有窗口的平均排放结果,同时采用了3B-MAW方法对试验结果进行了分析,结果如表4所示。
由表4可知:对于样车1—3采用PEMS工况,怠速区窗口的数量在0~396范围,未达到nmin=2400要求,说明目前的PEMS测试工况由于缺少怠速工况并不完全适合采用3B-MAW计算,需要增加怠速工况的比例。从样车4的结果可以看出,若采用随机工况进行测试,WB-WM中所有窗口的平均排放为453.7mg·(kWh)-1,而采用有效窗口进行计算后平均排放仅有30.11mg·(kWh)-1,原因是窗口功率阈值过滤了排放较高的低负荷工况。因此,对于实际道路工况的排放水平评估,不适合采用WB-WM方法。
另外,对于样车3,采用3B-MAW方法计算的低负荷区和高负荷区的排放结果均超过了表2中的限值,而采用WB-WM的计算结果并没有超过法规限值(690mg·(kWh)-1)。样车5的排放比较恶劣,两种计算方法的结果均超过了限值要求。因此,在3B-MAW的应用过程中,可以通过排放限值的设计,使得其相对于WB-WM的测算方法更为严格。
5结论
本文针对三区移动平均窗口(3B-MAW)法在重型车排放远程监控中的应用进行了模型建立、数据清洗、模型特性、参数影响和与功基窗口法对比等几个方面的研究,得出如下结论:
1)若采用车辆行驶海拔小于2500m、发动机转速大于500r/min,冷却液温度大于70℃,且NOx传感器传输有效数据作为数据筛选条件,大约有32.1%的远程监控被删除掉。
2)在3B-MAW模型中,三区划分的比例与车辆的实际行驶工况有关。中高负荷区的平均车速和后处理平均温度较高。为了同时兼顾排放结果计算的准确性和所需数据量不过大,最小窗口数、窗口宽度、第1划分线和第2划分线应分别设置在2400、300s,6%和20%附近。
3)实际道路便携式排放测试系统(PEMS)工况若要采用3B-MAW分析数据,需要增加怠速工况的比例。由于不受窗口功率阈值限制,相对于功基窗口法,3B-MAW能够更好地反映低负荷排放,更适合对实际道路随机驾驶工况进行分析。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
中国科技纵横(2016年20期)2016-12-28
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
软件导刊(2016年9期)2016-11-07
科技视界(2016年8期)2016-04-05
汽车实用技术(2015年8期)2015-12-26
汽车实用技术(2015年8期)2015-12-26
中国铸造装备与技术(2015年5期)2015-12-10