
基于CART决策树的车辆与行人碰撞中头部损伤风险预测
2023-04-29 00:44:03韩勇罗金镕何勇吴贺林旭洁蔡鸿瑜
汽车安全与节能学报 2023年5期
韩勇 罗金镕 何勇 吴贺 林旭洁 蔡鸿瑜

摘 要: 为快速预测汽车碰撞行人头部损伤风险,建立了一种基于多刚体系统动力学仿真方法和分类回归决策树(CART)的预测模型。参考欧洲新车评价规程(Euro-NCAP),开发了具有精细化刚度特征的车辆前部结构多体模型;以行人尺寸、初始车辆速度和行人速度、人车碰撞位置、相对角度为变量,通过全因子设计试验方法,建立了4 500 组多体仿真模型;采用CART 模型,挖掘变量与动力学响应参数的关联性。结果表明:车辆初始碰撞速度是影响行人头部动力学响应的关键因素;该模型对于碰撞速度和头部损伤准则(HIC15)值的预测精度分别为87.5% 和86.8%,平均预测耗时为42.7 ms,两者均具有较高的预测精度和决策能力。该结果可为制定行人头部损伤风险评估实验和损伤防护研究提供理论参考依据。
关键词: 汽车安全;碰撞事故;头部损伤准则(HIC);车辆前部结构;决策树预测模型;头部动力学响应;分类回归决策树(CART)
中图分类号: U 461.91 文献标识码: A DOI: 10.3969/j.issn.1674-8484.2023.05.002
作为典型的弱势道路群体(vulnerable road users,VRUs)之一,行人在交通事故中面临较高的伤亡风险[1]。根据2018 年世界卫生组织统计数据:每年由交通事故造成的人员死亡人数持续增长,且目前已攀升至135 万人,其中有54% 是道路弱势群体[2]。2020 年国家统计局数据显示:道路交通事故中行人受伤和死亡人数分别为256 101 和62 763 人[3]。相关研究结果表明头部损伤是交通事故中行人的主要损伤类型之一,也是致死主要原因[1]。因此,在交通安全中对于行人的头部损伤机理研究,已成为道路交通事故安全领域关注的重点之一。
研究者对人车碰撞事故中行人致死的相关影响因素进行了大量研究。PENG Yong [4] 通过对真实事故案例进行深度重建,研究发现车辆前部几何参数和刚度特性是影响行人头部损伤的主要因素。S. Debasis [5] 等人通过对比3 种不同尺寸(AF05,AM50,AM95)的行人在不同碰撞速度下的头部损伤风险,得出相较于撞击表面的形状,硬度和速度对头部损伤风险影响更大。余超[6] 等人借助真实行人碰撞交通事故数据,研究了挡风玻璃角度与行人头部损伤之间的相关性。此外,吴贺[7] 通过多刚体系统与有限元联合仿真,结合事故视频信息提出了一种高精度事故重建方法。HANYong [8] 等人通过深度事故重建的方法,分析自动紧急制动(autonomous emergency breaking, AEB)效能对道路弱势群体头部损伤风险的影响。LI Fan [9] 通过对真实交通事故进行重建,研究车速与头部损伤指标(headinjury criteria, HIC)、头部相对碰撞速度之间的一般规律,分析得出了行人碰撞中的动力学响应与头部损伤密切相关。王岩[10] 选用典型人车交通事故数据,采用Monte Carlo 方法开展了2 600 次人车碰撞仿真试验,系统性地研究行人碰撞运动学响应并得到损伤参数的概率分布模型。LIU Xuejun [11] 通过研究不同车速和车辆前部结构对行人损伤风险和运动学响应的影响,建立了车速、车辆前部结构参数与头部损伤严重程度的预测模型。B. Iason [12-14] 通过建立大规模碰撞事故数据库,并采用机器学习算法实现了乘员头部损伤严重程度的快速预测。GAO Wenrui [15-16] 依据1 512 种工况建立了包含821 例有效事故仿真的大数据库,通过决策树算法训练生成关于头部损伤等级的预测模型。
人们在研究车辆碰撞行人头部损伤影响因素时,采用的多刚体车辆模型前部结构多采用单一刚度曲线作为仿真输入,不够准确,对刚度的设置存在一定的缺陷[17-18]。此外,行人交通事故具有复杂性、影响因素多样性的特征,用少量的事故重建数据进行分析难免具有偶然性。当下的预测方法多为关系复杂、不够直观的概率分布等数学模型等,非专业人员在使用时难度较大。
本文基于搭建的精细化刚度特征的前部结构模型,采用全因子实验设计法生成了以车辆初始速度、行人模型尺寸、行人初始速度、初始碰撞位置、初始碰撞角度为碰撞参数的大规模数值仿真数据集。利用分类回归决策树(classification and regression tree, CART)模型对该数据集进行挖掘分类,训练并生成头部动力学响应和损伤风险的决策树模型。该模型不仅能以树的形式描述碰撞参数和头部动力学响应,并具有快速预测行人头部损伤风险的能力,节约仿真时间和成本。
1 研究方法
1.1 分析思路
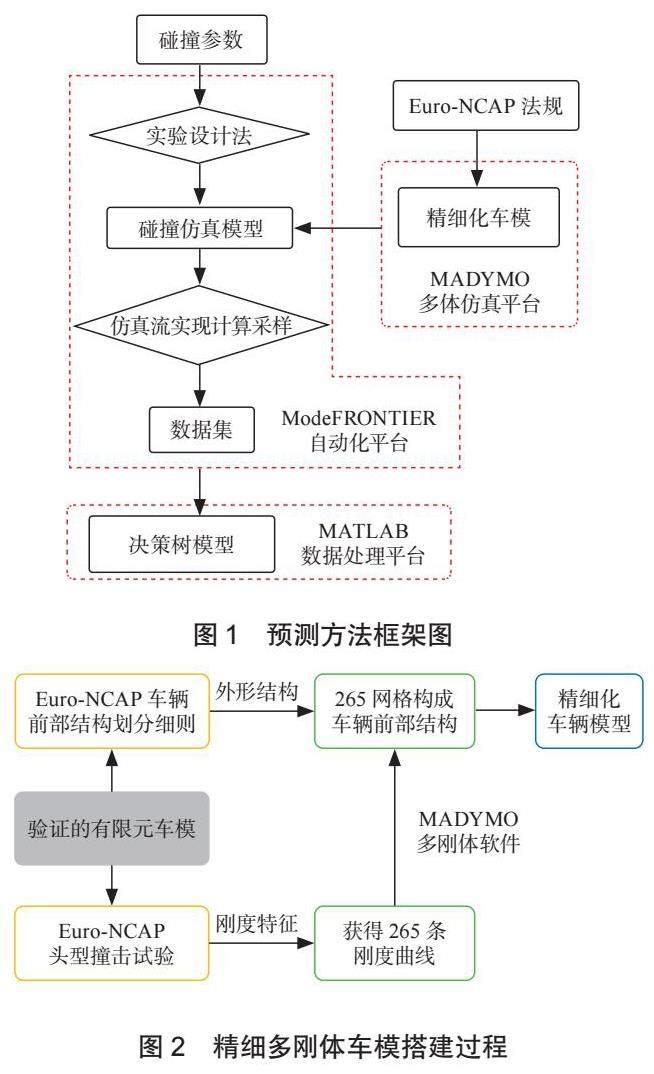
根据决策树模型的创建过程,行人头部响应参数决策树模型的建模流程主要包括3 个部分(如图1 所示): 1) 根据2018 版欧洲新车评价规程(EuropeanNew Car Assessment Programme, Euro-NCAP)中行人测试协议,并参考有限元小型车辆前部结构几何尺寸在MADYMO(Version 7.5)程序中建立精细化多刚体车辆模型;2) 采用MADYMO 多刚体仿真平台搭建车辆碰撞行人事故场景,并对碰撞参数采用全因子实验设计方法,生成包括4 500 个多体仿真模型的大规模数据集;3) 通過决策树算法对数据集进行挖掘分类,获得基于头部动力学响应的预测模型。
1.2 多体车辆精细化前部结构的建立
多刚体车辆模型包括发动机罩、挡风玻璃、A柱、保险杠、车顶以及前后轮等结构。本研究重点关注与行人头部发生碰撞的主要车辆部位,包含发动机罩和挡风玻璃的车辆前部结构[19]。图2 为精细化多体车辆模型的建立过程,主要包括车辆外形尺寸的建立和各部件刚度特性的定义。其中,车辆尺寸结构以经过实车实验验证[20-21] 的丰田卡罗拉Axio 有限元基础轿车模型的前端几何参数为基础,根据2018 版Euro-NCAP 测试规程中关于车辆前部结构划分标准,搭建精细网格化的车辆前部结构,共计265 个网格测试区。对应网格的刚度曲线根据Euro-NCAP 法规中头锤试验方法,采用有限元头部冲击器撞击卡罗拉基础车辆前部结构的目标位置获得的力—位移曲线进行加载。在精细化多体车辆模型中,分别对265 个测试网格定义不同的刚度曲线,可通过车辆碰撞行人仿真得到更加真实合理的头部损伤准则和头部动力学响应。搭建生成的精细化多刚体车辆模型,如图3 所示。
1.3 数据集的生成
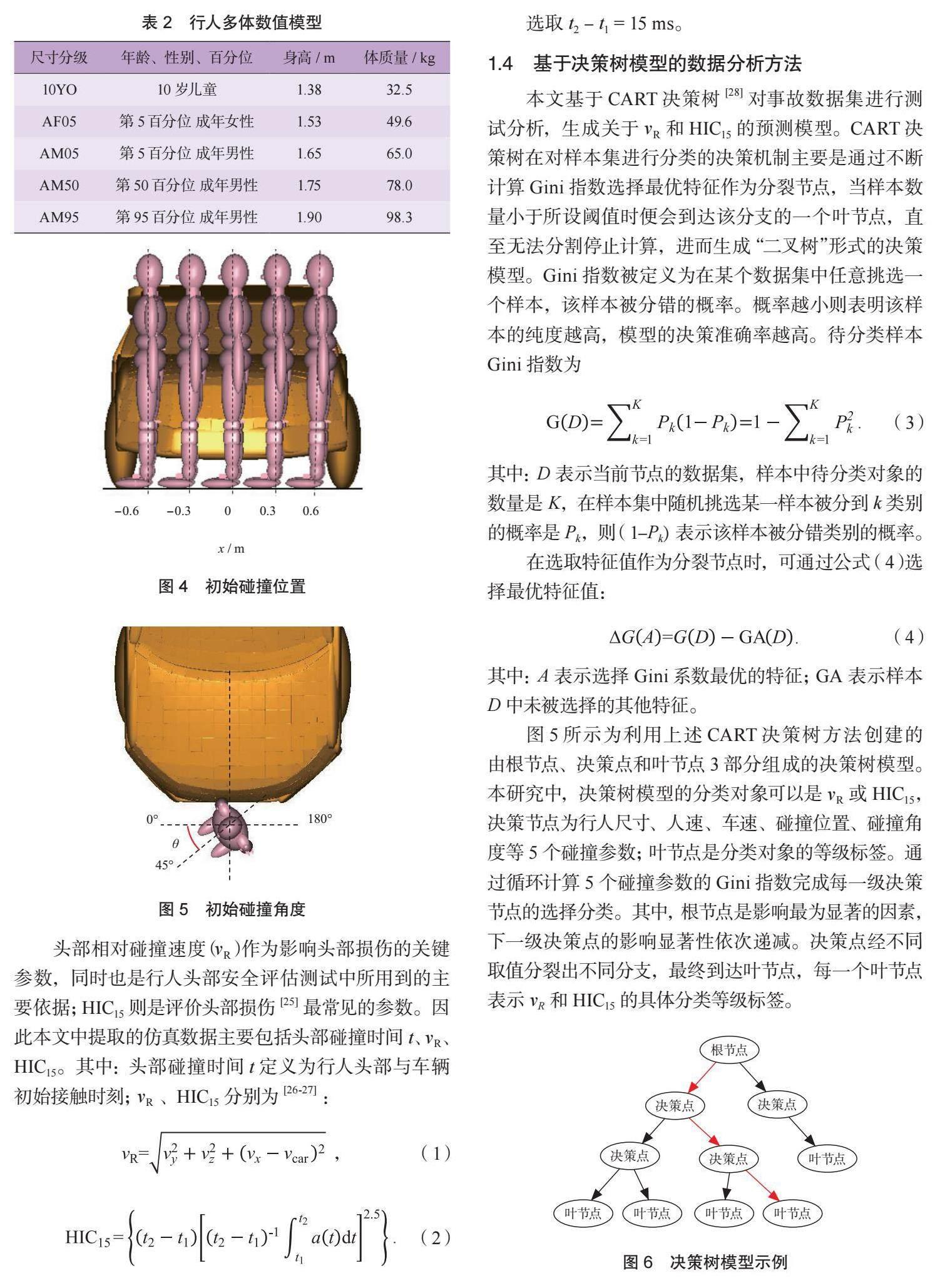
真实的交通事故中,影响行人头部损伤的因素众多[10, 22-25]。本研究中选取对行人头部损伤影响较为显著的参数,主要变量包括车辆初始速度、行人尺寸、行人初始速度、初始碰撞位置和初始碰撞角度,各参数变化范围如表1 所示。基于表1 各参数变量水平,采用全因子试验法共生成5×4×9×5×5 = 4 500 组碰撞仿真模型,并通过多目标优化软件ModeFRONTIER(2020, ESTECO)建立自动化仿真流,耦合MADYMO和 Matlab(2019)实现大批量人—车碰撞仿真的自动化调参、仿真模拟计算和数据提取,交通事故虚拟数据集的生成。选取车辆初始速度变化范围为20~60 km/h,梯度间隔为5 km/h [23-24]。选取5 种不同尺寸的行人多刚体数值模型,如表2 所示。
初始碰撞位置Pos 表示行人与车辆的相对位置距离( 见图4),变化范围设置为 -0.6~+0.6 m,梯度间隔为0.3 m [25]。初始碰撞角度θ 定义为车辆中心线与行人步行状态下的夹角( 见图5),变化范围设置为0°~180°,梯度间隔为45°。
头部相对碰撞速度(vR)作为影响头部损伤的关键参数,同时也是行人头部安全评估测试中所用到的主要依据;HIC15 则是评价头部损伤[25] 最常见的参数。因此本文中提取的仿真数据主要包括头部碰撞时间t、vR、HIC15。其中:头部碰撞时间t 定义为行人头部与车辆初始接触时刻; vR 、HIC15 分别为[26-27] :
选取t2 - t1 = 15 ms。
1.4 基于决策树模型的数据分析方法
本文基于CART 决策树[28] 对事故数据集进行测试分析,生成关于vR 和HIC15 的预测模型。CART 决策树在对样本集进行分类的决策机制主要是通过不断计算Gini 指数选择最优特征作为分裂节点,当样本数量小于所设阈值时便会到达该分支的一个叶节点,直至无法分割停止计算,进而生成“二叉树”形式的决策模型。Gini 指数被定义为在某个数据集中任意挑选一个样本,该样本被分错的概率。概率越小则表明该样本的纯度越高,模型的决策准确率越高。待分类样本Gini 指数为
其中: D 表示当前节点的数据集,样本中待分类对象的数量是K,在样本集中随机挑选某一样本被分到k 类别的概率是 Pk,则( 1-Pk) 表示该样本被分错类别的概率。
在选取特征值作为分裂节点时,可通过公式(4)选择最优特征值:
其中: A 表示选择Gini 系数最优的特征;GA 表示样本D 中未被选择的其他特征。
图5 所示为利用上述CART 决策树方法创建的由根节点、决策点和叶节点3 部分组成的决策树模型。
本研究中,决策树模型的分类对象可以是vR 或HIC15,决策节点为行人尺寸、人速、车速、碰撞位置、碰撞角度等5 个碰撞参数;叶节点是分类对象的等级标签。通过循环计算5 个碰撞参数的Gini 指数完成每一级决策节点的选择分类。其中,根节点是影响最为显著的因素,下一级决策点的影响显著性依次递减。决策点经不同取值分裂出不同分支,最终到达叶节点,每一个叶节点表示vR 和HIC15 的具体分类等级标签。
2 结果分析
从已生成的4 500 组车辆碰撞行人数据集中,剔除掉车辆未与行人头部发生碰撞的142 组无效仿真数据,因此,最终的数据集共包含4 358 组有效碰撞仿真数据。
根据数据集中vR 值并参考相关文献[23],将数据集划分为:高速H、中速M 和低速L 等3 个等级;基于数据集中HIC15 取值范围,以及头部损伤耐受限度[28-29] 和相关法规的要求[30-31] 将HIC15 划分为:高、中、低3 个等级(见表3)。
2.1 基于头部相对碰撞速度的决策树模型
根据表3 中的等级划分标准,采用CART 决策树算法对4 358组仿真数据进行“ 二叉树” 形式的分类决策,得到如图7 所示的相对碰撞速度(vR)决策树模型。该模型的决策点和叶节点数分别为30、15 个,且头部相对碰撞速度在H、M、L 对应分支等级的预测准确率分别为0.88、0.95、0.81,整个决策树的平均预测精度达到87.5%。根据叶节点上的数字可知该分支的预测精度,此外,决策树模型会自动选择正确的分支,对vR的分类等级进行决策并获得最佳结果,如A3 分支可解释为:当10.4 m/s ≤ vcar ≤ 16.0 m/s 时,vR ≥ 11.0 m/s。
对图7 中vR 决策树模型的准确性进行验证,在决策树模型的H、M、L 分类等级中分别选择纯度与精度均较高的A1、A2、A3 分支,并在对应分支里随机挑选5 组碰撞参数进行仿真分析,验证结果如表4。由表4可知,A1、A2、A3的预测准确率分别为0.96、0.98、0.95,平均预测精度达到97.8%,随机挑选3 组分支的验证精度接近于其预测模型的平均精度,表明该决策树模型可用于准确预测vR。
由图7 可知:车辆初始速度(vcar)作为vR 决策树模型的根节点,是碰撞参数中纯度最高(Gini 指数最小)的分裂属性, 即为影响vR 的最显著参数,且vR与vcar 正相关,这与前人的研究结果一致[23-24,27] ;在vcar ≥ 10.4 m/s(即约40 km/h),vR 的分类等级多为High。其次,行人尺寸和人车碰撞初始位置对vR 也有一定影响。
2.2 基于HIC15 的决策树模型
图8 所示为HIC15 的决策树模型,其中决策点30 个,叶节点15 个。该模型对L、M、H 等3 个等级的预测准确率分别为0.88、0.82、0.85,整個决策树的平均预测精度达到86.8%。
按照类似方法对HIC15 决策树模型展开验证,结果如表5 所示。
知: vcar 作为决策树的根节点,其对HIC15的影响最大,且损伤等级为High 级(HIC15 ≥1 000)的数据点集中发生在vcar ≥10.4 m/s (即约40 km/h),这与前人研究结论一致[24-25,27]。此外, 初始碰撞角度和行人尺寸多次影响HIC15 决策树模型的分支决策。
由表5 可知:决策树模型在B1、B2、B3 分支的验证准确率分别为0.94、0.95、0.85,平均验证精度达到88.6%。此外, B1“L”、B2“M” 2 条分支的验证精度远大于预测精度,而B3“H”的验证精度较接近于其分支的预测精度,表明该决策树模型可用于准确预测行人头部HIC15。
3 结 论
1) 行人头部相对速度vR 和头部损伤指标HIC15 决策树模型的平均精度分别为87.5% 和86.8%,平均预测耗时为42.7 ms。该决策树模型准确可靠,可为车辆碰撞行人的头部动力学预测及决策和主、被动安全领域的研究提供参考,并为法规的制定提供一些建议。
2) 通过vR 和HIC15 决策树模型可知:车辆初始速度是影响行人头部动力学响应的关键因素,相对碰撞速度vR 和行人头部损伤指标HIC15 会随着vcar 增加而变大,且当vcar ≥ 10.4 m/s ( 即约40 km/h) 时,vR 和HIC15 的决策分支等级多为H(High)级,表明该速度是车辆碰撞行人损伤和防护研究的关键点。
3) 行人模型尺寸和人与车碰撞初始位置多次成为决策点,是影响相对碰撞速度vR 的显著因素,而人与车碰撞角度和行人速度的影响较小。
4) 人与车碰撞角度多次影响HIC15 决策树模型的决策分支,是影响行人头部损伤HIC15 的关键因素,而人与车碰撞初始位置、行人模型身高和行人速度对HIC15 的影响很小。
参考文献( References)
[1] Otte D, J?nsch M, Haasper C. Injury protection andaccident causation parameters for vulnerable road usersbased on German In-Depth Accident Study GIDAS [J].Accid Anal Prev, 2012, 44(1): 149-153.
[2] World Health Organization. Global status report on roadsafety 2018 [R]. Geneva, 2018.
[3] 中华人民共和国公安部. 中华人民共和国道路交通事故统计年报(2020 年度)[R]. 公安部交通管理局, 2020.
Ministry of Public Security of the Peoples Republicof China. Annual report on road traffic accidents ofthe Peoples Republic of China (2020) [R]. TrafficAdministration of the Ministry of Public Security, 2020.(in Chinese)
[4] PENG Yong, Deck C, YANG Jikuang, et al. Effectsof pedestrian gait, vehicle-front geometry and impactvelocity on kinematics of adult and child pedestrian head[J]. Int J Crashworthiness, 2012, 17(5): 553-561.
[5] Sahoo D, Deck C, Yoganandan N. Influence of stiffnessand shape of contact surface on skull fractures andbiomechanical metrics of the human head of differentpopulation under lateral impacts [J]. Accid Anal Prev,2015, 80(5): 97-105.
[6] 余超, 兰靛靛, 王方, 等. 乘用车前挡风玻璃角度对行人头部/ 颅脑损伤影响研究[J]. 振动与冲击, 2020, 39(6):189-197.
YU Chao, LAN Diandian, WANG Fang, et al. Influence ofwindscreen inclination angle on the head/brain injury in apedestrian impact accident [J]. J Vib Shock, 2020, 39(6):189-197.(in Chinese)
[7] 吴贺, 韩勇, 石亮亮, 等. 基于视频信息的高精度事故重建方法研究[J]. 汽车工程, 2020, 42(6): 778-783.
WU He, HAN Yong, SHI Liangliang, et al. Research onhigh precision accident reconstruction method based onvideo information [J]. Auto Engi, 2020, 42(6): 778-783. (inChinese)
[8] 韩勇, 李永强, 许永虹, 等. 基于VRUs 深度事故重建的AEB 效能对头部损伤风险的影响[J]. 汽車安全与节能学报, 2021, 12(4): 490-498.
HAN Yong, LI Yongqiang, XU Yonghong, et al.Effectiveness of AEB system for head injury risk based onVRUs in-depth accident reconstruction [J]. J Auto SafeEnergy, 2021, 12(4): 490-498. (in Chinese)
[9] LI Fan, YANG Jikuang. A study of head–brain injuries incar-to-pedestrian crashes with reconstructions using indepthaccident data in China [J]. Int J Crashworthiness,2010, 15(2): 117-124.
[10] LIU Xuejun, YANG Jikuang. A study of influences ofvehicle speed and front structure on pedestrian impactresponses using mathematical models [J]. Traffic Inj Prev,2002, 3(1): 31-42.
[11] 王岩. 基于人车事故数据的行人碰撞后运动及损伤规律研究[D]. 北京: 清华大学, 2017.
WANG Yan. Post-crash movement and injury patterns ofpedestrians based on human-vehicle accident data [D].Beijing: Tsinghua University, 2017. (in Chinese)
[12] CHEN Wentao, ZHOU Qing, NIE Bingbing, et al.Generating a large-scale numerical database of motorvehicle crashes for rapid injury severity prediction [C]//Intl Res Counc Biomech Injury (IRCOBI Asia), Beijing,China, 2020: 25-28.
[13] Iason B, NIE Bingging. A framework for near real-timeoccupant injury risk prediction using a sequence-tosequencedeep learning approach [C]// Intl Res Councilon Biomech Injury (IRCOBI), Florence, Italy, 2019: 19-20.
[14] Iason B, YANG Saichao, ZHOU Qing, et al. A frameworkfor rapid on-board deterministic estimation of occupantinjury risk in motor vehicle crashes with quantitativeuncertainty evaluation [J]. Sci China Technol Sc, 2020,64(3): 521-534.
[15] GAO Wenrui, BAI Zhonghao, ZHU Feng, et al. A studyon the cyclist head kinematic responses in electric-bicycleto-car accidents using decision-tree model [J]. Accid AnalPrev, 2021, 160 (1): 106305.
[16] 李歡, 白中浩, 高文睿, 等. 基于决策树模型的电动自行车与SUV 碰撞中骑车人头部响应[J]. 汽车安全与节能学报, 2021, 12(1): 43-51.
LI Huan, BAI Zhonghao, GAO Wenrui, et al. Cyclisthead response in electric bicycle-SUV collision based ondecision tree model [J]. J Auto Safe Energy, 2021, 12(1):43-51. (in Chinese)
[17] Anderson R, Mcclean J, Dokko Y. Determining accuratecontact definitions in multibody simulations for DOE typereconstruction of head impacts in pedestrian accidents [C]//19th Intl Tech Conf Enha Safe Vehi (ESV), Washington D.C, USA, 2005, Paper Number: 05-0175.
[18] Elliott J, Simms C, Wood D. Pedestrian head translation,rotation and impact velocity: The influence of vehiclespeed, pedestrian speed and pedestrian gait [J]. AccidAnal Prev, 2012, 45: 342-353.
[19] 王国林, 鲁砚. 人车碰撞事故仿真与行人保护研究[J]. 汽车工程, 2009, 31(1): 14-17.
WANG Guolin, LU Yan. Study on simulation of humanvehiclecrashes and pedestrian protection [J]. Auto Engi,2009, 31(1): 14-17.
[20] Ito D, Yamada H, Oida K, et al. Finite element analysisof kinematic behavior of cyclist and performance ofcyclist helmet for human head injury in vehicle-to-cyclistcollision [C]// Intl Res Council Biomech Injury (IRCOBI),Berlin, Germany. 2014: 119-131.
[21] Mizuno K, Yamada H, Mizuguchi H, et al. The influenceof lower extremity postures on kinematics and injuriesof cyclists in vehicle side collisions [J]. Traffic Inj Prev,2016, 17(6): 618-624.
[22] 聂进, 李桂兵, 王薛超. 乘用车前端结构几何参数对行人头部动力学响应和损伤风险的影响[J]. 汽车工程,2014, 36(12): 1473-1482.
NIE Jin, LI Guibin, WANG Xuechao. Influence of frontendstructural geometry parameters of passenger vehicleson pedestrian head dynamics response and injury risk [J].Auto Engi, 2014, 36(12): 1473-1482. (in Chinese)
[23] HAN Yong, Matsui Y. Effects of vehicle impact velocity,vehicle front-end shapes on pedestrian injury risk [J]. TrafInju Prev, 2012, 13(5): 507-518.
[24] 曾必强, 高继东, 彭伟. 基于事故再现的行人头部碰撞研究[J]. 汽车工程, 2016, 38(8): 961-966.
ZENG Biqiang, GAO Jidong, PENG Wei. Accidentreproduction-based pedestrian head-on collision study [J].Auto Engi, 2016, 38(8): 961-966. (in Chinese)
[25] Hertz E. A note on the head injury criterion (HIC) as apredictor of the risk of skull fracture [C]// Proc Asso AdvaAuto Med Annu Conf, San Antonio, USA. 1993: 303-312.
[26] 水野幸治. 汽车碰撞安全[M]. 韩勇,陈一维 译. 北京:人民交通出版社,2012: 221-254.
Mizuno K. Crash Safety of Passenger Vehicles [M].HAN Yong, CHEN Yiwei Translated. Beijing: ChinaCommunications Press, 2012: 221-254. (in Chinese)
[27] Breiman L, Friedman J, Olshen R, et al. Classification andregression trees [J]. Open J Fore, 2016, 6(3): 582-588.
[28] 王亞军, 王栋, 施欲亮. Euro-NCAP 行人保护试验协议V7.0 解析[J]. 汽车工程学报, 2014, 4(4): 304-308.
WANG Yajun, WANG Dong, SHI Yuliang. Analysis ofEuro-NCAP pedestrian testing protocol Version 7.0 [J].Chin J Auto Engi, 2014, 4(4): 304-308. (in Chinese)
[29] Eppger R, Sun E, Bandak F, et al. Development ofimproved injury criteria for the assessment of advancedautomotive restraint systems [S/OL]. (2023-03-28).National Highway Traffic Safety Administration, 1999.https://www.nhtsa.gov/sites/nhtsa.gov/files/rev_criteria.pdf.
[30] Euro NCAP. European new car assessment programme:Pedestrian testing protocol (2019) [S/OL]. (2023-03-28).http://wwweuroncap.com/media/53153/euro-ncap-pedtest-protoc.pdf.
[31] 中国汽车技术研究中心 (CATARC). 中国新车评价规程[S/OL]. (2023-03-28). http://www.c-ncap.org.cn/cms/picture/357380003076288512.pdf.
China Automotive Technology and Research Center(CATARC). C-NCAP (China New Car AssessmentProgram) management regulation (2021 edition) [S/OL]. (2023-03-28). http://www.c-ncap.org.cn/cms/picture/357380003076288512.pdf. (in Chinese)
猜你喜欢
基层中医药(2021年1期)2021-07-22 06:56:44
意林(2021年5期)2021-04-18 12:21:17
军事文摘(2020年22期)2021-01-04 02:16:38
成都信息工程大学学报(2019年3期)2019-09-25 08:31:20
扬子江(2019年1期)2019-03-08 02:52:34
电子制作(2018年16期)2018-09-26 03:27:06
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
中央民族大学学报(自然科学版)(2016年4期)2016-06-27 08:06:04
天津医科大学学报(2015年2期)2015-12-22 09:24:34
郑州大学学报(医学版)(2015年1期)2015-02-27 14:50:26
