
云支持的分层式车辆队列预测性巡航控制
2023-04-29 16:36:16王宙褚端峰高博麟梅润钟薇
汽车安全与节能学报 2023年5期
王宙 褚端峰 高博麟 梅润 钟薇
摘 要: 为了提升队列行驶的经济性,提出了一种高速公路场景下的云支持的队列预测性巡航控制方法(CPPCC),并進行真实道路和车辆数据模型的仿真实验。该方法采用了分层式结构,上层为云端的队列速度规划层,下层为队列稳定控制层。云端的速度规划层,考虑了道路坡度的滚动域的动态规划(RDP)算法,实现队列行驶的经济性目标。下层的车端队列稳定控制层,搭载了分布式模型预测控制器(DMPC),来跟踪云端发送速度,同时考虑了队列的稳定控制。结果表明:与传统的前车与领航车跟随的定速巡航队列(PLF-CC)方法相比,在行驶时间减小0.24% 的前提下,本文所提出的方法节省6.04% 的能源。
关键词: 智能车辆;云支持的队列预测性巡航控制(CPPCC);滚动动态规划(RDP);分布式模型预测控制(DMPC);前车与领航车跟随的定速巡航队列(PLF-CC)
中图分类号: U 461.8 文献标识码: A DOI: 10.3969/j.issn.1674-8484.2023.05.008
道路运输快速发展的同时,也带来了一系列严峻的挑战,例如交通安全问题和环境污染问题。而道路运输的主力为商用车,商用车的能源消耗问题和安全问题日益严重。在货物运输方面,商用车的燃油消耗量与碳排放量却持续上升。由于运输需求的不断增加,在2015 年到2019 年全球货物运输总量增加了11%。其中,公路运输占运输总量的52%,其燃油消耗量增加了5.9%[1],排放量增加了9.7%[2]。
事实上,商用车燃油花费的燃料成本大致占一个占重型车辆运营总成本的1/3 [3]。即使减少百分之几的燃油消耗将带来巨大的经济效益和环境效益,从而需要一种新的技术手段提升安全,减小能源消耗,提升道路运行效率。随着通信技术的进步,各种路侧设备的逐渐完善。车与车通信、车与路通信等技术的应用和快速进步[4-5],为车辆队列提供强大的技术支撑。队列作为智能交通系统的重要的技术手段之一[6],能够通过缩短车辆间距,使得队列内车辆的运行风阻减小,从而达到节能的目的。文献[7] 表明:队列的车辆间距为10 m 时能够节省10%~15% 的能源。将车辆组成队列的方式能够压缩车辆间距,能够提高整个道路的吞吐量,提升整个道路的通行效率。智能交通系统中的多车协同编队技术对提高车辆的运输效率、行驶安全性、节约能源及降低排放具有重大的社会和经济价值。
学者们还关注研究队列预测性巡航控制(platoonpredictive cruise control, PPCC)的控制架构研究。包括了分层式和集中式,集中式的方案需要队列内的所有车辆的状态信息,通过构建线性二次最优问题求解出队列最优的控制量,对通信要求高,设计难度大。而分层式的方案主要有基于误差的线性控制器,缺点是不能显式的处理约束问题。但是设计逻辑清晰,系统设计难度较低,易于实现,是现在主流的队列控制架构。其中上层进行队列的决策规划,其主要是队列经济车速的规划问题。在保证队列安全稳定的前提下,下层控制器完成对上层速度规划的策略跟随控制。GUO Ge等人[7] 研究了高速公路上商用车队列的速度规划与跟踪控制问题,提出上层为路径上的最优速度规划层和下层的速度跟踪层。YANG Yu 等人[8] 提出的新型分层生态协同的自适应巡航控制(ecological cooperativeadaptive cruise control, ECACC)策略,与传统的速度巡航控制相比,能源消耗可节省38.1% 以上。M. Maged等[6] 将最优模型预测控制作为上层的速度规划器,减小队列的能源消耗。规划的速度曲线发送到下层的比例—积分—微分(proportional integral derivative,PID)控制器中,进一步改善队列车辆间距。V. Turri 等[9] 针对重型商用车队列提出分层控制架构,旨在提高队列的节能和安全性表现。上层设计为基于预览道路地形信息的动态规划,预测队列最优行驶速度。下层为基于分布式模型预测控制的车辆控制层,控制车辆跟随上层下发的最优速度。
现有的队列巡航控制研究,集中在队列稳定性和行驶安全性的控制领域,并且已经取得了丰富的研究成果。针对队列的预测性巡航控制,主要关注于结合静态道路坡度信息和当前队列状态,进行队列速度规划。V. K. Lakshmanan 等[10] 提出节能驾驶优化控制可为领航车节省能源,但队列弦不稳定,因此导致队列其余车辆的整体能源消耗较大。因此,需要更复杂的生态驾驶分层方案来改善这两个方面。而结合云平台可以更加高效地解决队列预测性速度规划的问题,现有的研究也开始关注基于云平台的预测性巡航控制,学者已经开展将云端和车端做预测性巡航控制的研究。Li Keqiang 等[11] 在基于云控系统的一体化系统架构的前提下,提出云控汽车节能驾驶系统(cloud economicdriving system, Cloud EDS)。E. Ozatay 等[12] 将密集计算放在云端,云端利用精确的车辆和油耗模型确定终点沿路线的最佳速度轨迹,并将轨迹下发车辆控制,该方法能够节省5%~15% 的燃油消耗率。LI Shuyan等[13] 提出基于云控系统(cloud control system, CCS)的云计算预测巡航控制(cloud-based predictive cruisecontrol, CPCC),该方法相比传统的定速巡航的节油率为6.17%。该团队还提出基于CCS 的预测自适应巡航控制[14](predictive adaptive cruise control, PACC)算法。
在自由巡航时消耗时间少的情况下,可实现8.16% 的节油,结果表明CCS 在智能网联汽车应用方面具有巨大的潜力和可行性。
本文基于现有的队列预测性巡航控制的研究现状,提出云支持的分层式队列预测性巡航控制,实现队列行驶的安全,节能和高效的目标。基于云控系统提出云支持的分层式队列预测性巡航控制架构,上层的为基于坡度的云端速度规划算法,下层为队列稳定控制算法。云端部署考虑车辆动力学模型、车辆油耗模型和队列运行前方道路坡度信息的滚动动态规划算法(receding dynamic programming, RDP),而车端搭载的队列稳定控制部署分布式模型预测控制器(distributedmodel predictive controller, DMPC)。
1 云支持的分层式队列预测性巡航控制架构
1.1 分层式系统整体架构
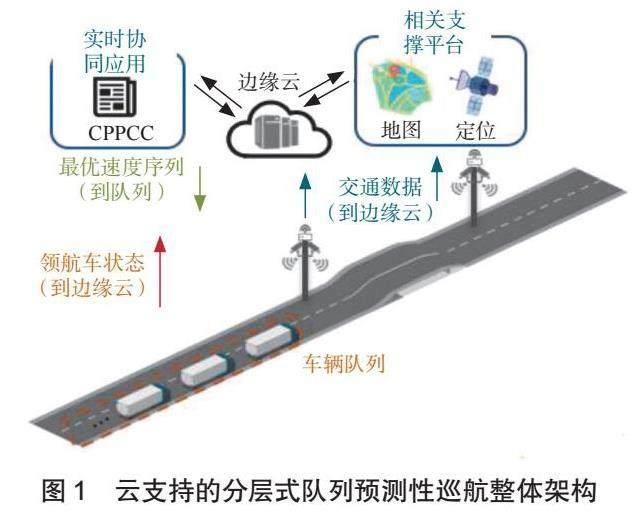
云支持的隊列预测性巡航控制(cloud-basedplatoon predictive cruise control, CPPCC)的车云分层架构如图1 所示。
边缘云的应用平台中部署了云端的队列预测性巡航速度优化算法,支撑平台提供车辆的定位信息和行驶前方的道路坡度信息作为CPPCC 算法的数据支撑。通过云端解算出优化的速度序列后下发到队列的车辆控制端,队列控制器将云端下发的速度序列进行解析,经过车辆控制器解算后输出最优控制量控制车辆。
滚动时域优化涉及预测系统未来的状态和静态的道路坡度信息,为了抵抗外界的干扰和预测的不确定性,采用模型预测的思路,通过滚动时域优化去抵消系统的不确定扰动。滚动距离域优化算法涉及预测系统未来的行为在外界的干扰如道路坡度时的系统变化。
1.2 分层式系统控制框架
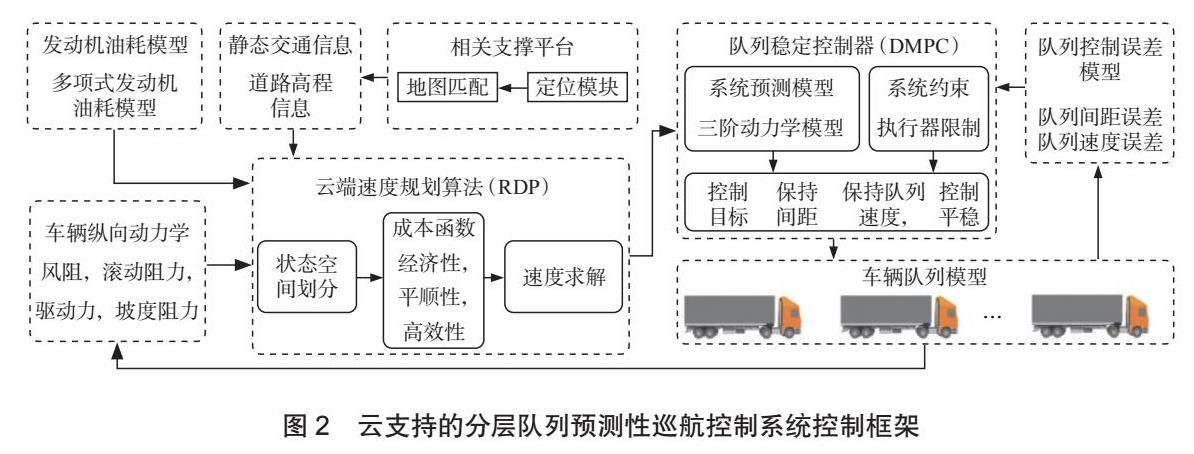
CPPCC 的系统控制框架如图2 所示的,主要分为了2 部分,2 部分别为云端和队列车端。云端包括了模块为车辆的发动机模型;相关支撑平台的定位模块;定位模块后的道路坡度信息模块;车辆纵向动力学模型模块和云端的速度规划算法模块。车端包括队列控制误差模型、队列稳定控制器模块和车辆队列模型。该8 个部分实现CPPCC 方法。
本文使用领航车作为最优速度规划算法的状态反馈。高速公路道路坡度的变化幅度较小,在整个车辆队列的范围内可理想化为近似相同,并且假设优化时刻队列的状态是稳定的,通过该假设可以大大减小系统设计的难度和算法计算时间。
云端通过地图定位模块确定车辆队列前方道路的高程信息,将静态道路信息的道路坡度信息和领航车反馈的车辆状态(位置、速度、加速度)信息作为云端速度规划的输入。最优速度规划算法还需要综合考虑车辆的纵向动力学模型,车辆的油耗模型和车辆系统约束,云端速度规划层通过预测性巡航算法解算出最优的速度序列后下发到队列中的所有车辆。
4 实验及结果分析
4.1 仿真实验设置
为了验证CPPCC 方法的有效性, 基于Matlab/Simulink 和Trucksim 搭建实验。其中Trucksim 负责提供车辆动力学模型,Matlab/Simulink 中部署CPPCC算法。本文选择真实高速公路数据进行实验仿真验证,仿真路段为山东G22 高速沂源—诸葛段,实车数据为某车厂的真实车辆数据,实车参数如表1 所示,RDP成本函数的具体参数如表2 所示。
设置本文的对比方法为前车与领航车跟随的定速巡航队列(predecessor-leader followings cruise controlplatoon, PLF-CC),队列为3 辆商用车组成的车辆队列。为了避免因为车辆换挡而引入的变化,本文的研究将车辆的档位设置为定6 档运行。实验关注的指标为车辆运行的油耗情况,运行时间,队列稳定性指标。稳定性指标包括队列的出车间距误差和速度误差。
设置的实验路段包括了长下坡,长上坡和连续变化的坡度的路段,能够将算法在不同路段下进行仿真实验的验证。
4.2 仿真实验稳定性分析
队列预测性巡航控制方法(CPPCC)算法下层为队列的车端稳定控制器,需要分析全程中队列的车辆间距误差和速度误差的情况。如图6 所示为全程的队列稳定控制效果图。
由图6 可知:全程队列的稳定控制保证在一定的范围内,队列车辆的间距误差为[-0.3,0.5] m,队列车辆速度误差为[-0.25,0.1] m/s,证明CPPCC 队列稳定控制器的有效性。
队列稳定性指标中的队列控制误差的结果如下表3所示,队列中V2速度误差的范围为[-0.230,0.092](m/s)。间距误差的范围为[-0.240,0.478] m。队列中V3 速度误差的范围为[-0.235,0.097](m/s),间距误差的范围为[-0.285,0.481] m。
4.3 队列经济性分析
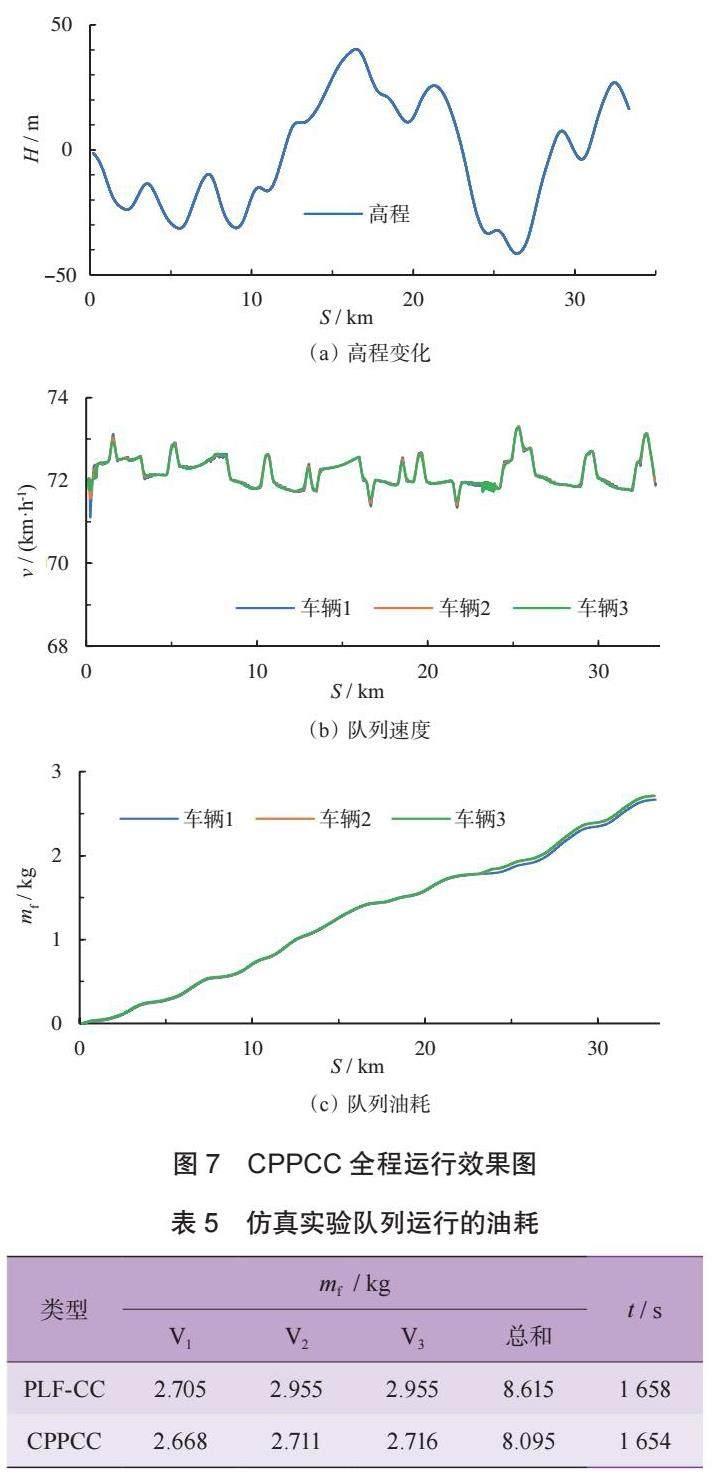
分析全程的队列运行情况,云端的速度规划算法能够根据道路坡度的变化实时预测队列行驶的速度,对测试路段全程的队列预测性巡航控制方法(CPPCC)的能耗和队列的控制效果进行说明。如图7 所示为全程的运行情况。
由图7 可知:CPPCC 能够根据道路坡度变化完成全程的速度规划,队列的速度波动情况较小。队列的3 辆车的油耗较为接近,证明使用领航车作为云端速度规划算法的状态反馈,其余车辆状态可以理想化为基本一致,从而跟随从云端下发的速度(the speed sentdown from cloud)的假设是成立的,跟随车辆也能够获得和领航车相差不大的能耗。
统计本文提出方法(CPPCC)和前车与领航车跟随的定速巡航队列(PLF-CC)的车辆油耗情况,如表5 所示。在保证整个队列在行驶时间相比较PLF-CC 提升效率0.24% 的前提下,达到了6.04% 的节油率。
5 结 论
提出队列预测性巡航控制方法(CPPCC),将队列预测性巡航控制方法和云端结合,进一步释放队列预测性巡航控制的优势,实现节能和高效的目标。设计CPPCC 架构,通过滚动迭代的方式抵消队列未来运行的不确定性。然后在云端的部署速度规划算法,通过考虑道路坡度的滚动动态规划算法(RDP)求解出队列行驶的经济车速。最终在云端下发最优速度序列后,队列稳定控制器综合当前队列车辆的速度误差和间距误差,通过分布式模型预测控制器(DMPC)实现队列的控制。经过真实道路和真实的车辆数据模型仿真实验发现,CPPCC 设计的队列稳定控制器能够保证队列的速度误差范围为[-0.25,0.1] (m/s),队列的间距误差范围为[-0.3,0.5] m 。在保证队列稳定的前提下,相比较于传统的PLF-CC,整体运行效率提升0.24%,节油率达到6.04%。
在本文的研究工作中,将队列视为理想的,无干扰运行的整体。而前方存在干扰车辆对于队列的控制的影响是十分巨大的,在队列的预测性巡航控制中如何将队列前方的环境干扰车辆进行考虑仍然是一个充满挑战的问题。结合云端,能够给传统的队列预测性巡航控制带来更加丰富的信息,如何结合云端的多信息融合,超视距感知的优势,将整个队列的状态进行的一体化的决策规划将更进一步提升队列预测性巡航控制的优势。
参考文献(References)
[1] EC-European Commission. EU transport in figuresstatisticalpocketbook [DB/OL]. (2022-02-22). https//:transport.ec.europa.eu/media-corner/publications/statistical-pocketbook-2021_en.
[2] Department of Transportation, Bureau of TransportationStatistics US. Freight facts and figures [DB/OL]. (2022-02-22). https//: www.bts.gov/product/freight-facts-and-figures.
[3] Scania A B. Annual report for the year 2013 [R]. 556184-8564, S?dert?lje, Sweden, Aug. 2013.
[4] WU Qiong, ZHENG Jun. Performance modeling andanalysis of the ADHOC MAC protocol for vehicularnetworks [J] Wireless Networks, 2016, 22(3): 799-812.
[5] WU Qiong, ZHENG Jun. Performance modeling andanalysis of the ADHOC MAC protocol for VANETs [C]//Proc IEEE Intl Conf Commu (ICC15), London, UK,2015: 3646-3652.
[6] Maged M, Mahfouz D M, Shehata O M, et al. Behavioralassessment of an optimized multi-vehicle platoonformation control for efficient fuel consumption [C]// 2ndNovel Intell Leading Emerging Sci Conf (NILES), Giza,Egypt, 2020: 403-409.
[7] GUO Ge, WANG Qiong. Fuel-efficient en route speedplanning and tracking control of truck platoons [J]. IEEETrans Intel Transp Syst, 2018, 20(8): 3091-3103.
[8] YANG Yu, MA Fangwei, WANG Jiawei, et al. Cooperativeecological cruising using hierarchical control strategy withoptimal sustainable performance for connected automatedvehicles on varying road conditions [J]. J Cleaner Produ,2020, 275: 123-156.
[9] Turri V, Besselink B, Johansson K H. Cooperative lookaheadcontrol for fuel-efficient and safe heavy-duty vehicleplatooning [J]. IEEE Trans Contr Syst Tech, 2017, 25(1):12-28.
[10] Lakshmanan V K, Sciarretta A, Ganaoui-Mourlan O E.Cooperative eco-driving of electric vehicle platoons forenergy efficiency and string stability: Science direct [J].IFAC-Papers Online, 2021, 54(2): 133-139.
[11] 李克強, 李家文, 常雪阳, 等. 智能网联汽车云控系统原理及其典型应用[J]. 汽车安全与节能学报, 2020, 11(3):261-275.
LI Keqiang, LI Jiawen, CHANG Xueyang. Cloud controlsystem for intelligent and connected vehicles and itsapplication [J]. J Auto Safe Engi, 2020, 11(3): 261-275. (inChinese)
[12] Ozatay E, Onori S, Wollaeger J, et al. Cloud-basedvelocity profile optimization for everyday driving: Adynamic-programming-based solution [J]. IEEE TransIntel Transp Syst, 2014, 15(6): 2491-2505.
[13] LI Shuyan, WAN Keke, GAO Bolin, et al. Predictivecruise control for heavy trucks based on slope informationunder cloud control system [J]. J Syst Eng Elect, 2022,33(4): 812-826.
[14] LI Shuyan, LI Rui, GAO Bolin, et al., Predictive adaptivecruise control for heavy-duty vehicle based on cloudcontrol system [C]. //2022 IEEE 25th Intl Conf IntellTransp Syst (ITSC), Macau, China, 2022: 2998-3003.
[15] ZHAI Chunjie, LIU Yonggui, FEI Luo. A switched controlstrategy of heterogeneous vehicle platoon for multipleobjectives with state constraints [J]. IEEE Trans IntelTransp Syst, 2019, 20(5): 1883-1896.
[16] ZHOU Yang, WANG Meng, Ahn S. Distributed modelpredictive control approach for cooperative car-followingwith guaranteed local and string stability [J]. Transp ResPart B: Methodol, 2019, 128(1): 69-86.
[17] Rakovic S V, Kerrigan E C, Kouramas K I, et al. Invariantapproximations of the minimal robust positively invariantset [J]. IEEE Trans Autom Contr, 2005, 50(3): 406-410.
猜你喜欢
小学生学习指导(低年级)(2020年4期)2020-06-02 09:09:26
现代装饰(2020年5期)2020-05-30 13:01:58
软件(2020年3期)2020-04-20 00:58:44
军营文化天地(2018年2期)2018-12-15 17:39:08
产品可靠性报告(2017年7期)2017-09-05 09:49:12
丝路艺术(2017年5期)2017-04-17 03:11:50
初中生(2017年3期)2017-02-21 09:17:43
小学生优秀作文(趣味阅读)(2017年3期)2017-02-11 03:11:31
新闻前哨(2015年2期)2015-03-11 19:29:27
外语教学理论与实践(2014年2期)2014-06-21 08:34:30
