
神经网络识别和Markov链预测的商用车APU控制策略
2023-04-29 16:36:16王君琦李勇滔郑伟光张彦会陈子邮许恩永李育方王善超
汽车安全与节能学报 2023年5期
王君琦 李勇滔 郑伟光 张彦会 陈子邮 许恩永 李育方 王善超
摘 要: 为改善商用车空气处理系统的燃油经济性,提出一种以基于电磁阀控制的电控空气处理单元(APU)控制策略,进行了Simulink 系统仿真实验。该策略具有基础、低压和高压等3 种工作模式;基于发动机工况识别和预测方法;利用Matlab/Simulink 搭建车辆模型和空气处理系统模型;并构建了神经网络模式识别和Markov 链预测控制模型对发动机的运行工况进行识别分类和需求扭矩百分比预测。结果表明:仿真实验验证了工况分类和电磁阀控制策略的有效性。在中国重型商用车瞬态工况(C-WTVC)下,与相同储气筒初始气压条件的机械APU 相比较,应用该控制策略的电控APU 的功率消耗下降480 Wh,下降比率34.7%,燃油经济性显著改善。
关键词: 商用车;燃油经济性;空气处理单元(APU);电磁阀控制;控制策略;模式识别;Markov 链
中图分类号: U 463.55 ;TP 212 文献标识码: A DOI: 10.3969/j.issn.1674-8484.2023.05.009
使用电子控制并优化其控制策略从而提升商用车辆的燃油经济性、安全性和驾驶体验成为了不可阻挡的趋势[1-3]。因为电子控制的汽车零部件有着更加智能化、精确化和响应快等优势[4],且合理的车辆电子电气架构可以实现车辆信息共享、满足功能分配、满足成本控制等特点[5],对机械零部件实现电子控制或将现有的机械零部件更换为电子控制的零部件是满足提升燃油经济性的有效方法。
空气处理单元(air processing unit,APU)是商用车空气处理系统中处理干燥压缩空气的重要部件,其主要作用是干燥和清洁空气压缩机输入的压缩空气。因空气处理系统涉及的空气压缩机对燃油消耗存在一定影响,近年来该系统的性能优化问题受到了国内外学者的高度重视。
杨长伟[6-7] 等人明确了空气压缩机的占空比和实际工作时间为评价APU 性能的重要指标,并提出了更改空气处理系统零件的机械结构以实现减少能量消耗的方法。项小雷[8] 等人将键合图理论用于分析空气处理系统,以提升系统的响应性能。传统APU 由于采用的是气压控制的调压阀,固定的气压值控制调压阀换向只能为APU 提供单一的工作模式,未能满足日益复杂的行驶工况和驾驶需求。电子控制的汽车零部件能够实现更高的控制精度和更复杂的控制任务,不仅可以通过合适的模式工作阈值和合理的模式切换策略,兼顾不同的驾驶工况,以达到节省燃油和提高动力性的需求[9],还可利用先进的控制算法对车辆或发动机的运行工况进行预判断,使其工作状态更加安全稳定[10-12]。电子控制的APU 能够通过不同的工作模式匹配对应的工况形式,相比于传统的机械式APU,其在燃油经濟性、零部件使用寿命方面具有一定的提升[13-14]。
为此,本文以电控空气处理单元APU 的占空比和能量消耗为研究对象,基于发动机工况识别和预测,提出的一种具有多工作模式的商用车APU 控制策略。将利用Matlab/Simulink 搭建驾驶员、车辆和APU 的仿真模型。通过对实车行驶数据进行训练,由神经网络完成发动机工况的分类识别,并使用Markov 链预测未来短时间内的发动机需求扭矩辅助工况识别,根据识别分类和预测发动机工况对APU 的模式进行控制。可望进一步优化模式识别和预测算法,提升商用车空气处理系统的能耗表现。
1 商用车电控APU 模式
1.1 电控APU 工作模式
空气处理单元APU. 包含空气压缩机、干燥罐和储气筒等主要零部件。电控APU 可以控制入口压力,从而控制空气压缩机的功率消耗。在对电控APU 工作模式设计时,应考虑车辆的发动机运行工况,并将发动机运行工况和APU 工作模式进行匹配。在应对加速或爬坡等对发动机功率需求较大的工况时,空气压缩机应减少对发动机的功率和扭矩消耗;而应对减速或下坡等工况时,车轮可以对发动机进行反拖,空气压缩机应充分利用反拖能量进行泵气。通过分析上述发动机工况并对各运行工况进行匹配,设计基础模式、低压模式和高压模式3 种APU 工作模式。
商用车电控APU 的3 种工作模式主要特点如下:基础模式,储气筒的气压适中,空气压缩机负荷适中,发动机做功直接带动空气压缩机,有一定的燃油消耗;低压模式,储气筒的气压较低,空气压缩机负荷低,发动机在进入该模式一段时间内不带动空气压缩机,空气压缩机不消耗发动机功率;高压模式,储气筒的气压较高,空气压缩机负荷较高,燃油消耗大,若发动机靠车辆滑行或下坡反拖的能量对空气压缩机做功,可以减少燃油消耗。
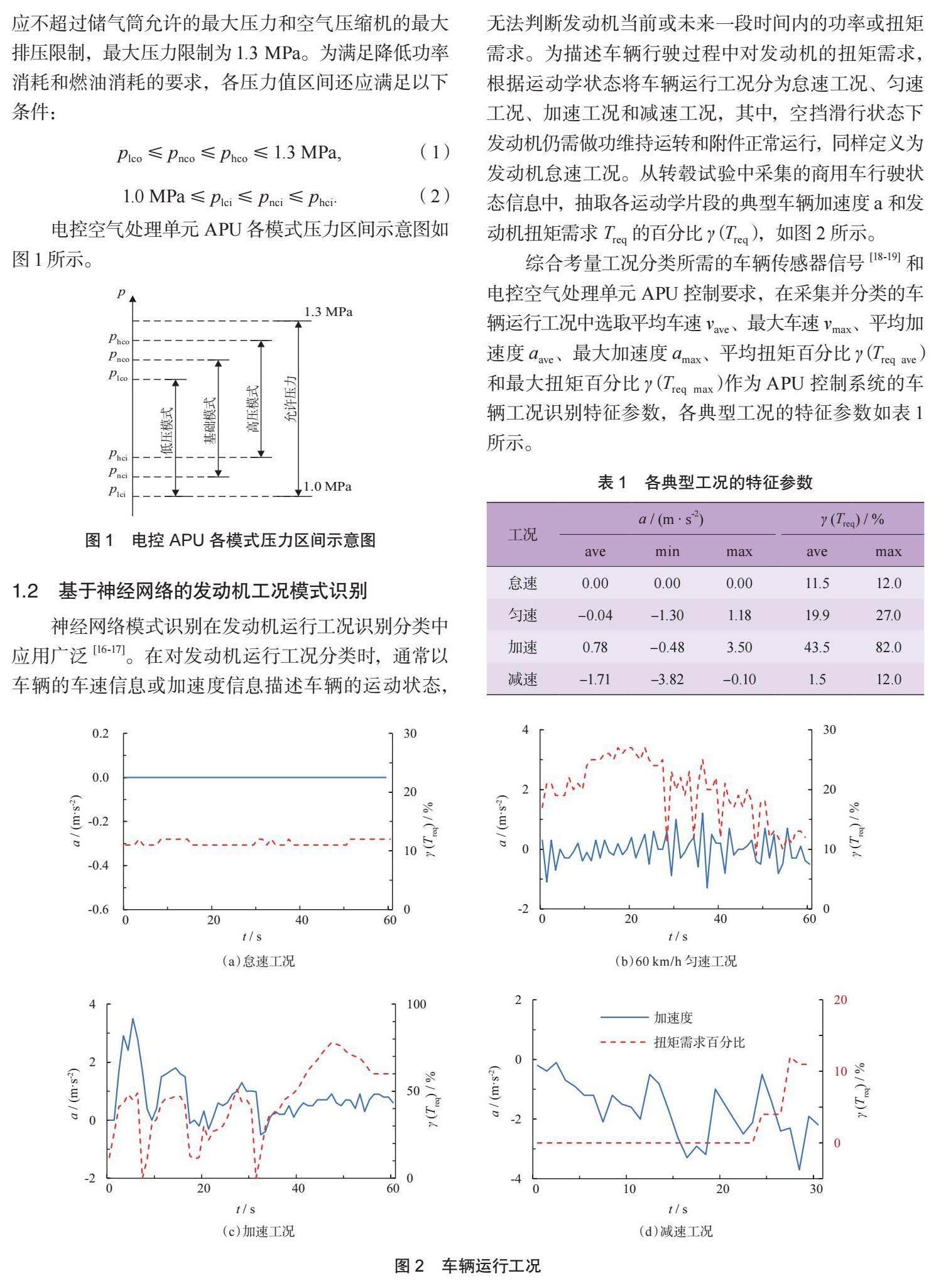
在基础模式、低压模式和高压模式下,转入泵气状态的切进压力分别为pnci、plci、phci ;转入卸荷模式的切断压力分别为pnco、plco、phco。其中,最低压plci 应满足国标[15] 最低额定工作气压1.0 MPa ;最大压力phco应不超过储气筒允许的最大压力和空气压缩机的最大排压限制,最大压力限制为1.3 MPa。为满足降低功率消耗和燃油消耗的要求,各压力值区间还应满足以下条件:
电控空气处理单元APU 各模式压力区间示意图如图1 所示。
1.2 基于神经网络的发动机工况模式识别
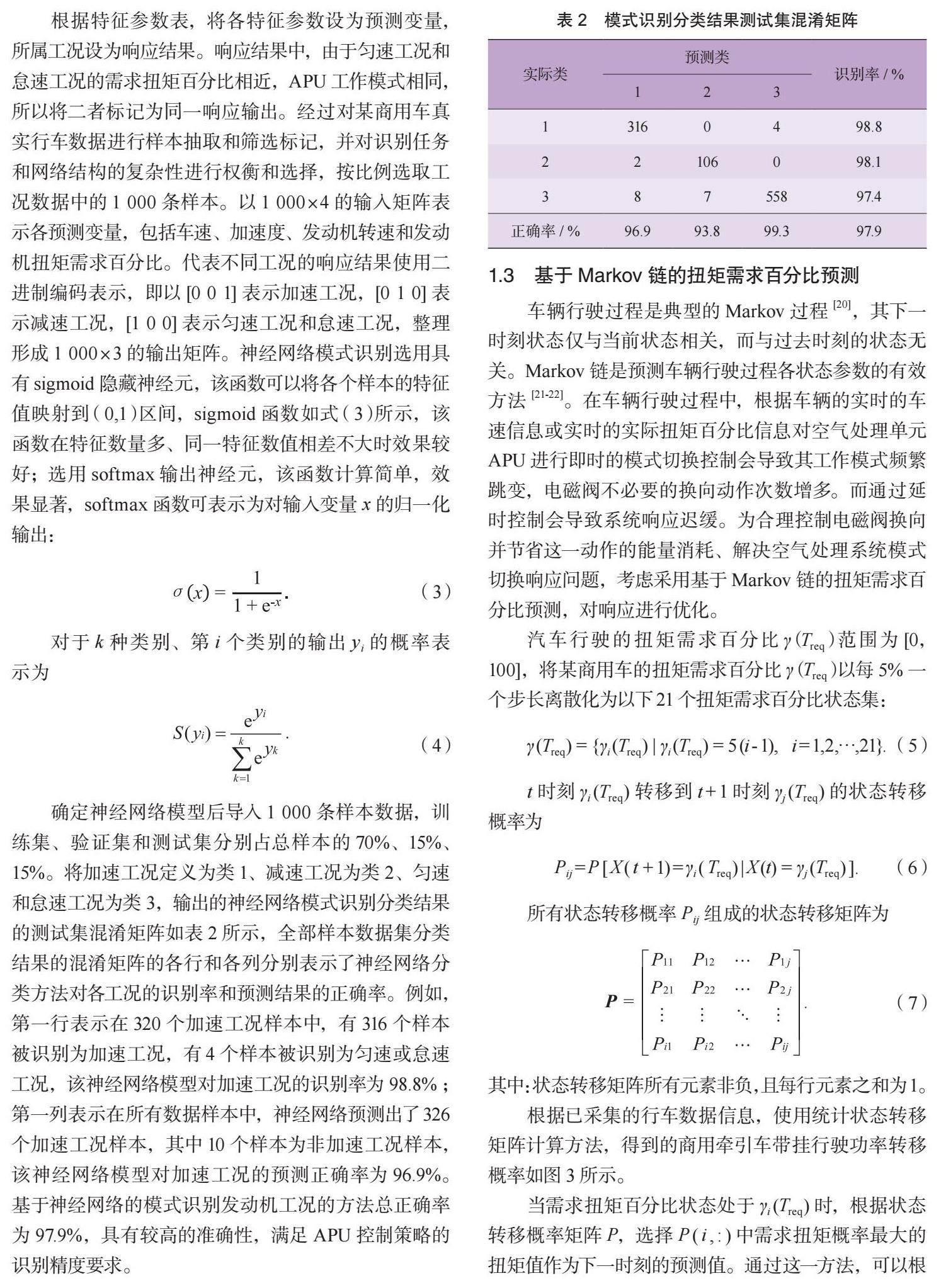
神经网络模式识别在发动机运行工况识别分类中应用广泛[16-17]。在对发动机运行工况分类时,通常以车辆的车速信息或加速度信息描述车辆的运动状态,无法判断发动机当前或未来一段时间内的功率或扭矩需求。为描述车辆行驶过程中对发动机的扭矩需求,根据运动学状态将车辆运行工况分为怠速工况、匀速工况、加速工况和减速工况,其中,空挡滑行状态下发动机仍需做功维持运转和附件正常运行,同样定义为发动机怠速工况。从转毂试验中采集的商用车行驶状态信息中,抽取各运动学片段的典型车辆加速度a 和发动机扭矩需求Treq 的百分比γ(Treq),如图2 所示。
综合考量工况分类所需的车辆传感器信号[18-19] 和电控空气处理单元APU 控制要求,在采集并分类的车辆运行工况中选取平均车速vave、最大车速vmax、平均加速度aave、最大加速度amax、平均扭矩百分比γ(Treq ave)和最大扭矩百分比γ(Treq max)作为APU 控制系统的车辆工况识别特征参数,各典型工况的特征参数如表1所示。
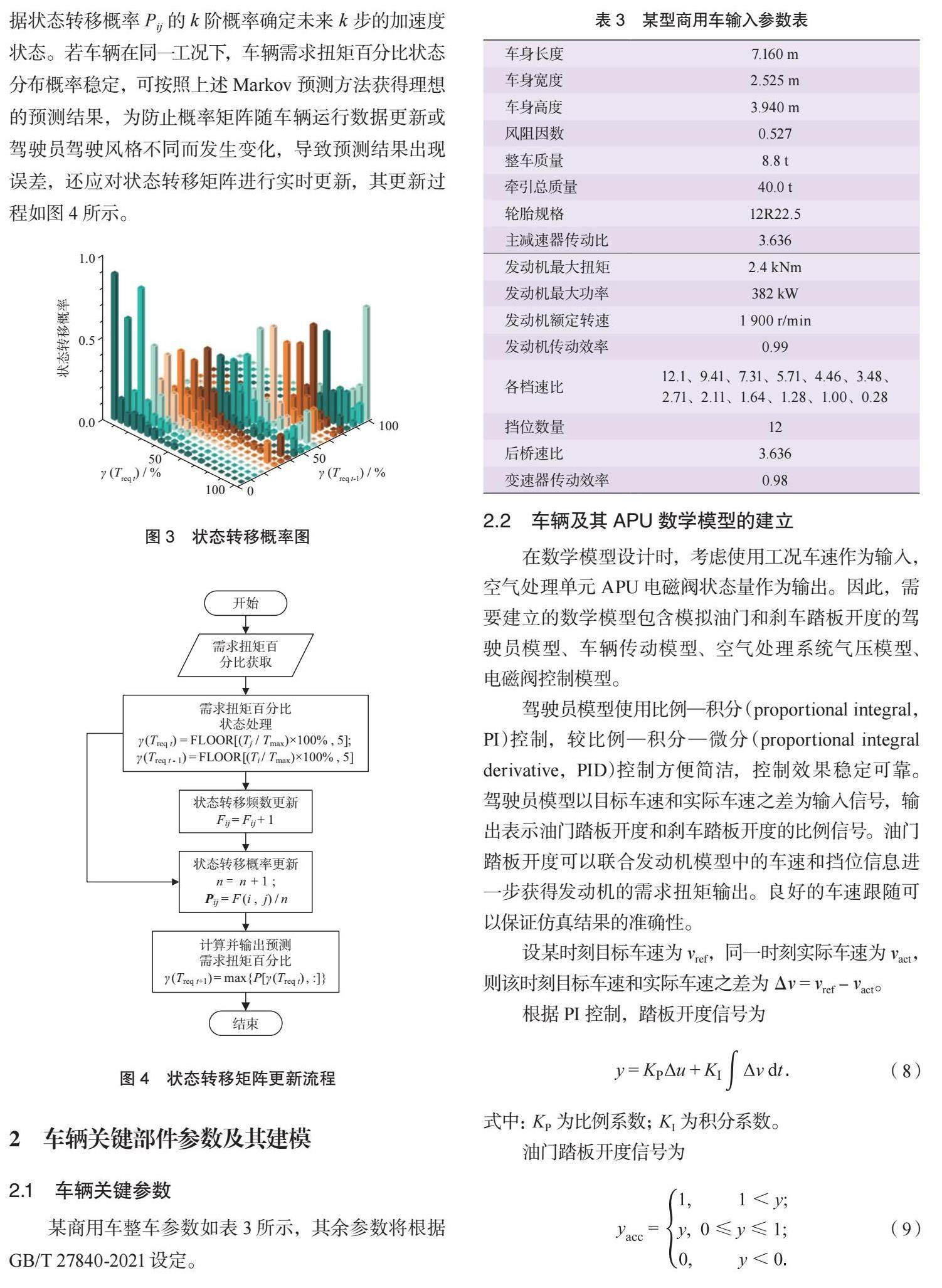
根据已采集的行车数据信息,使用统计状态转移矩阵计算方法,得到的商用牵引车带挂行驶功率转移概率如图3 所示。
当需求扭矩百分比状态处于γi (Treq) 时,根据状态转移概率矩阵P,选择P ( i , : ) 中需求扭矩概率最大的扭矩值作为下一时刻的预测值。通过这一方法,可以根据状态转移概率Pij 的k 阶概率确定未来k 步的加速度状态。若车辆在同一工况下,车辆需求扭矩百分比状态分布概率稳定,可按照上述Markov 预测方法获得理想的预测结果,为防止概率矩阵随车辆运行数据更新或驾驶员驾驶风格不同而发生变化,导致预测结果出现误差,还应对状态转移矩阵进行实时更新,其更新过程如图4 所示。
2 车辆关键部件参数及其建模
2.1 车辆关键参数
某商用车整车参数如表3 所示,其余参数将根据GB/T 27840-2021 设定。
2.2 车辆及其APU 数学模型的建立
数学模型设计时,考虑使用工况车速作为输入,空气处理单元APU 电磁阀状态量作为输出。因此,需要建立的数学模型包含模拟油门和刹车踏板开度的驾驶员模型、车辆传动模型、空气处理系统气压模型、电磁阀控制模型。
驾驶员模型使用比例—积分(proportional integral,PI)控制,较比例—积分— 微分(proportional integralderivative,PID)控制方便简洁,控制效果稳定可靠。驾驶员模型以目标车速和实际车速之差为输入信号,输出表示油门踏板开度和刹车踏板开度的比例信号。油门踏板开度可以联合发动机模型中的车速和挡位信息进一步获得发动机的需求扭矩输出。良好的车速跟随可以保证仿真结果的准确性。
设某时刻目标车速为vref,同一时刻实际车速为vact,则该时刻目标车速和实际车速之差为Δv = vref - vact。
根据PI 控制,踏板开度信号为
2.3 控制系统Simulink 模型建立空气处理单元APU 系统仿真模型主要由整车模型、控制器模型和储气筒气压模型组成。为快速构建APU 系统仿真模型,降低模型搭建难度和模型阶次,本文建立的系统模型将基于以下假设:
发动机扭矩计算忽略加速阻力和坡道阻力;储氣筒内压缩空气视为理想气体,其压缩因子Z = 1;储气筒内压缩空气消耗视为匀速消耗,其总消耗量由同等质量条件的转毂实验得出。
根据式(8)—式(16), 建立某商用牵引车辆及其空气处理系统仿真模型,系统仿真模型如图5 所示。
在APU 模型中,电磁阀决策模块使用并行状态机实现,APU 的状态切换和APU 的模式切换2 个子模块都处于活动状态。其中,APU 状态子模块中的气压工作区间由APU 模式子模块决定并发送至APU 状态子模块。该模型以发动机转速为输入,以电磁阀状态xv1和xv2、空气压缩机负载时间tdur、储气筒气压值p 为输出。
3 结果及分析
3.1 模式识别和预测分类结果
为验证模式识别和预测分类方法的有效性,在中国重型商用车瞬态工况(China World Transient VehicleCycle,C-WTVC)的车速输入下,分别对加速度分类、神经网络识别分类、神经网络识别和Markov 链预测分类的工况分类方法进行仿真,输出电控空气处理单元APU 的工作模式,仿真输出C-WTVC 工况车速下的电控APU 工作模式分类结果如图6 所示,其中,“模式1”表示低压模式,“模式2”表示基础模式,“模式3”表示高压模式。
通过与加速度分类和模式识别分类方法进行对比,基于神经网络识别和Markov 链预测的电控APU 控制方法模式切换频次较其他方法明显降;另外,通过观察分类结果和车速可以发现,该方法对细微的车辆状态变化判断更加准确、避免了APU 工作模式频繁切换。相比于加速度分类方法,该方法使得APU 工作模式可以稳定应对突然变化的速度需求和发动机扭矩需求,具有较好的鲁棒性。
3.2 电控APU 仿真结果及分析
采用C-WTVC 车速作为输入,在储气筒初始气压值设定为1.0 MPa、车辆牵引质量30 t 条件下,对单一工作模式的机械式空气处理单元APU 和加速度分类、神经网络识别分类、神经网络识别和Markov 链预测分类的工况分类方法分别进行仿真。APU 各模式仿真切断阀状态结果如图7 所示,其中“状态1”表示切断电磁阀xv1 通电,此时空气压缩机不工作;“状态0”表示切断电磁阀xv1 不通电,空气压缩机工作。基于神经网络识别和Markov 链预测控制以及基于调压阀控制的APU,空气压缩机的瞬时功率Pins 曲线如图8 所示。
记录机械式APU 仿真实验结果和多模式电控APU 各工作模式仿真数值结果,以机械式APU 台架实验数值结果作为对照,APU 各工作模式实验数值结果如表5 所示。其中: tdur 为空气压缩机工作时间,γ(tdur)为空气压缩机占空比,Pcom 为空气压缩机功耗,nv1 为切断(电磁)阀换向次数。表5 中,机械式APU 台架实验结果为机械式APU 在3 轮C-WTVC 工况下的实验结果平均值。仿真实验与台架实验的空气压缩机占空比绝对误差约为3%。考虑到台架实验中空气压缩机转速值获取过程包含车辆换档时的动力衔接和行驶阻力等因素,认为该仿真实验结果具有参考意义。
由表5 可知:在C-WTVC 工况下,通过对驾驶工况识别和分类的APU 控制策略相较于机械式APU 的气压控制方法可以显著降低空气压缩机的工作时间,占空比下降约12%;在空气压缩机功耗方面,电控APU 控制策略使空气压缩机功耗下降约480 kWh,功率消耗下降约34.7% ;基于神经网络识别和Markov 链预测分类的APU 控制策略较其他2 种控制策略在能耗方面优势不明显,但较其他2 种控制方法降低了电磁阀的换向次数,减少了电磁阀的工作强度,起到了节能和增加电磁阀使用寿命的效果。
4 结 论
本文基于发动机工况识别和预测,提出的一种具有3 种工作模式的商用车空气处理单元APU 控制策略,建立了该车辆和空气处理系统的Matlab/Simulink 系统仿真模型。
在中国重型商用车瞬态工况(C-WTVC) 工况下,该电控APU 相较单一模式的APU 减少了12% 的空气压缩机工作时间,降低了空气压缩机的能量消耗约34.7%。
该电控APU 能够对不同扭矩需求百分比所处的工况进行识别和分类,使控制单元准确控制APU 工作模式。在车辆应对爬坡和超车等复杂工况时,该控制策略的应用降低了发动机附件的功率消耗,燃油经济性得到了显著改善。
参考文献 ( References)
[1] LIU Dahui, Eksioglu B, Schmid M J, et al. Optimizingenergy savings for a fleet of commercial autonomoustrucks [C]// IEEE Trans Intel Transp Syst, 2022, 23(7):7570-7586.
[2] 李耀华, 何杰, 范吉康. 基于多MAP 图的商用车电动助力转向控制策略[J]. 汽车安全与节能学报, 2022, 13(1):86-94.
LI Yaohua, HE Jie, FAN jikang. Control strategy ofelectric power steering for commercial vehicle based onMulti-MAP [J]. J Autom Safe Energ, 2022, 13(1): 86-94.(in Chinese)
[3] 杨凡, 顾杰, 黄凡, 等. 商用车气压电子驻车系统坡道辅助控制方法[J]. 液压与气动, 2021, 45(8): 145-153.
YANG Fan, GU Jie, HUANG Fan, et al. Hill startassistance control method of commercial vehicle withelectronic air parking brake system [J]. Chin HydrauPneumatics, 2021, 45(8): 145-153. (in Chinese)
[4] 同晓雅, 杜彬, 任静媛, 等. 基于商用车的电子驻车制动控制系统研究[J]. 汽车电器, 2022(10): 65-66+69.
TONG Xiaoya, DU Bin, REN Jingyuan, et al. Researchon electronic parking brake control system based oncommercial vehicle [J]. Auto Electric Parts, 2022(10): 65-66+69. (in Chinese)
[5] 张文斌, 王涛, 丁万兴, 等. 重型商用车电子电气架构的规划[J]. 汽車电器, 2021(1): 30-34. ZHANG Wenbin,
WANG Tao, DING Wanxing, et al. Planning of electronicand electrical architecture of heavy commercial vehicle [J].Auto Electric Parts, 2021(1): 30-34. (in Chinese)
[6] 杨长伟. 商用车制动系空气管理系统研究仿真[D]. 吉林:吉林大学, 2018.
YANG Changwei. Research and simulation of airmanagement system of commercial vehicle brake system[D]. Jilin: Jilin University. 2018. (in Chinese)
[7] Park W K, Mun S D, Lee H K, et al. Optimization ofdrying performance considering driving conditions [J].Int.J Automot. Technol. 12, 705 (2011).
[8] 项小雷, 李松松. 键合图理论在商用车气制动系统空气干燥器响应特性分析中的应用[J]. 汽车技术, 2012(10): 32-35+61.
XIANG Xiaolei, LI Songsong. Application of bond graph theory on air dryer response characteristic analysis of theair brake system for commercial vehicles [J]. Auto Tech,2012(10): 32-35+61. (in Chinese)
[9] 张旗, 严天一, 赵燕乐. 具有多工作模式的电机式主动横向稳定器控制策略研究[J]. 机械科学与技术, 2023,42(5): 793-801.
ZHANG Qi, YAN Tianyi, ZHAO Yanle. Research oncontrol strategy of a motor-type active anti-roll stabilizerwith multiple operating modes [J], Mech Sci Tech AerospEngi, 2023, 42(5): 793-801. (in Chinese)
[10] 李耀华, 刘洋, 冯乾隆, 等. 基于最优预瞄和模型预测的智能商用车路径跟踪控制[J]. 汽车安全与节能学报,2020, 11(4): 462-469.
LI Yaohua, LIU Yang, FENG Qianlong, et al. Pathtracking control for an intelligent commercial vehiclebased on optimal preview and model predictive [J]. JAutom Safe Energ, 2020, 11(4): 462-469. (in Chinese)
[11] 史培龙, 赵轩, 陈子童, 等. 基于道路行驶工况辨识的重型载货汽车排气制动系统主动控制研究[J]. 汽车工程,2023, 45(1): 104-111+146.
SHI Peilong, ZHAO Xuan, CHEN Zitong, et al. Studyon active control of exhaust brake system for heavydutytruck based on road driving condition recognition[J]. Autom Engineering, 2023, 45(1): 104-111+146. (inChinese)
[12] 蔡伟. 基于车速预测的电动商用汽车能量管理策略研究[D]. 成都: 西华大学, 2022.
CAI Wei. Research on energy management strategy ofelectric commercial vehicles based on condition prediction[D]. Chengdu: Xihua University, 2022. (in Chinese)
[13] 郇浪浪, 田雪毅, 赵鹏昌, 等. 空气处理单元的原理及实现方式研究[J]. 汽车实用技术, 2021, 46(11): 196-198.
HUAN Langlang, TIAN Xueyi, ZHAO Pengchang, etal. Study on the Principle and Implementation of AirTreatment Unit [J], Auto Appl Tech, 2021, 46(11): 196-198.(in Chinese)
[14] 吕征, 李法兵, 陈首刚. 商用车电控空气干燥器性能研究及应用[J]. 汽车实用技术, 2018(20): 159-162.
L? Zheng, LI Fabing, CHEN Shougang. Propertiesand application of electronic controlled air dryer forcommercial vehicles [J], Auto Appl Tech, 2018(20): 159-162. (in Chinese)
[15] 中华人民共和国工业和信息化部. 重型商用车辆燃料消耗量测量方法: GB/T 27840-2021 [S]. 北京: 中国标准出版社, 2021.
Ministry of Industry and Information Technology ofthe Peoples Republic of China. Fuel consumption testmethods for heavy-duty commercial vehicles: GB/T27840-2021 [S]. Beijing: Standards Press of China, 2021.(in Chinese)
[16] JIE Xing, HAN Xuefeng, YE Hui, et al. Driving cyclerecognition for hybrid electric vehicle [C]// ITEC Asia-Pacific, 2014: 1-6.
[17] 刘灵芝, 张冰战, 蒋通. 基于工况自适应的PHEV 等效燃油最小策略[J]. 汽车安全与节能学报, 2020, 11(3): 371-378.
LIU Lingzhi, Zhang Bingzhan, JIANG Tong. Equivalentconsumption minimization strategy for PHEV based ondriving condition adaptation [J]. J Autom Safe Energ,2020, 11(3): 371-378. (in Chinese)
[18] FENG Lei, LIU Wenjia, CHEN Bo. Driving patternrecognition for adaptive hybrid vehicle control [J]. SAEInt J Alt Power, 2012, 1(1): 169-179.
[19] Ericsson E. Independent driving pattern factors and theirinfluence on fuel-use and exhaust emission factors [J].Transp Res Part D: Transp Environ, 2001, 6(5): 325-345.
[20] 吳迪. ISG 混合动力汽车能量优化管理策略研究[D]. 合肥: 合肥工业大学, 2013: 75-88.
WU Di. Research on energy optimal management controlstrategy for ISG hybrid electric vehicle [D]. Hefei: HefeiUniversity of Technology, 2013: 75-88. (in Chinese)
[21] 尹燕莉, 马永娟, 周亚伟, 等. Markov 链与Q-Learning算法的超轻度混动汽车模型预测控制[J]. 汽车安全与节能学报, 2021, 12(4): 557-569.
YING Yanli, MA Yongjuan, ZHOU Yawei, et al. Modelpredictive control of super-mild hybrid electric vehiclebased on Markov chain and Q-Learning [J]. J Autom SafeEnerg, 2021, 12(4): 557-569. (in Chinese)
[22] 付翔, 铁鑫, 刘会康. 基于需求功率预测的混合动力越野车能量管理[J]. 江苏大学学报( 自然科学版), 2021,42(1): 67-76.
FU Xiang, TIE Xin, LIU Huikang. Energy managementof hybrid off road vehicles based on demand powerprediction [J]. J Jiangsu Univ (Nat Sci Ed), 2021, 42(1):67-76. (in Chinese)
猜你喜欢
经营者(2024年1期)2024-03-19 02:02:34
城市公共交通(2023年7期)2023-08-18 02:10:40
汽车实用技术(2022年19期)2022-10-19 07:45:58
城市公共交通(2021年3期)2021-04-15 06:39:52
装备制造技术(2020年3期)2020-12-25 05:21:52
汽车维修与保养(2015年2期)2015-04-17 01:30:41
城市轨道交通研究(2015年3期)2015-02-27 11:01:35
武夷学院学报(2014年5期)2014-07-19 10:08:27
凿岩机械气动工具(2014年4期)2014-03-01 04:00:18
凿岩机械气动工具(2014年2期)2014-03-01 04:00:01
