
智能汽车主动避撞工况的高实时预测控制
2023-04-29 16:36:16段京良陈良发王文轩焦春绚刘征宇马飞李升波
汽车安全与节能学报 2023年5期
关键词:智能汽车
段京良 陈良发 王文轩 焦春绚 刘征宇 马飞 李升波

摘 要: 为满足复杂交通场景下智能汽车轨迹跟踪避撞控制的高实时性要求,该文采用了一种循环模型预测控制算法(RMPC)将在线优化问题转化为循环策略参数的离线求解,并进行了仿真试验。根据车辆主动避撞的约束条件,引入惩罚函数将约束型主动避撞优化控制问题转化为无约束有限时域最优控制问题;进而利用循环函数逼近得到不同预测步长控制问题的最优解;最后将算法部署到原型控制器,结合CarSim 平台验证了算法的避撞性能以及在线计算的高效性。结果表明:预测步数从12 增加到20 步,避撞过程最小车距由0.34 m 提升至1.38 m,千次实验碰撞次数由44 下降到0 ;与常用在线优化求解器相比,该算法在预测步数为15 时,其计算效率提升超过5.6 倍。
关键词: 智能汽车;循环模型预测控制算法(RMPC);循环函数;横向主动避撞
中图分类号: U 467.1+4 文献标识码: A DOI: 10.3969/j.issn.1674-8484.2023.05.007
智能汽车主动避撞是指当车辆的行进方向出现潜在碰撞风险时,车辆通过减速或者转向避免碰撞。研究表明,在较高车速下,汽车通过转向实现横向主动避撞比仅采取减速的纵向主动避撞更加有效[1-2]。然而,车辆的横向主动避撞过程十分复杂,具有反应时间短、车辆易失稳和约束条件多的特点,及时准确的转向操作可有效降低车辆失稳和碰撞的风险。因此,这也对主动避撞策略求解的实时性和准确性提出了更高的要求[3-4]。
由于车辆在避撞过程中横向动力学特性高度非线性,并受到自车稳定性以及周车位置等因素的约束,因此主动避撞控制通常被构建为一个典型的非线性、带约束的最优控制问题。按照控制方法分类,主动避撞控制方法主要可分为PID 控制、滑模控制和模型预测控制等。PID 控制和滑模控制具有计算简单、实时性好、相对容易应用于实车的优点,但两者的控制精度较差,难以处理真实避撞场景中的复杂动态约束,无法保证车辆行驶的安全性。
模型预测控制(model predictive control, MPC)作为一种解决有限时域优化控制问题的常用控制方法,具有直接处理约束、预瞄状态反馈、滚动时域优化等优势[5-6]。MPC 避撞控制器可根据对环境信息处理方式的不同分为集中式控制器和分层式控制器:集中式控制器直接利用环境信息和车辆状态信息作为输入计算输出控制律;分层式控制器先利用环境信息和车辆状态进行轨迹规划生成期望轨迹,然后根据期望轨迹和车辆状态信息计算输出控制律[7-8]。分层式控制器在实车应用时,上层的轨迹规划通常基于线性车辆动力学模型生成期望轨迹,从而降低在线求解对车载计算资源的需求以提高控制器求解效率。而实际避撞过程中车辆轮胎通常处于非线性工作区,使得上层轨迹规划得到的期望轨迹难以跟踪甚至不可行。
针对分层式控制器面临的问题, 文献[9] 利用MPC 方法,基于车辆非线性动力学模型以及CarSim平台,通过引入静态障碍物,实现了多种速度下的实时避障。但是该方法仅考虑静态障碍物。文献[10] 通过建立碰撞的危险区域并在目标函数中加入避撞惩罚项实现主动避撞控制。该方法只考虑单个障碍物,在面对复杂多变的实际交通场景时,同样面临较大的困难。此外,由于非线性带约束控制问题在线计算的复杂度较高,上述MPC 避撞方法实际应用中无法满足车载控制器的高实时性要求。
为解决计算实时性的问题,文献[11] 基于线性系统提出了一种高实时MPC 控制方法,通过暖启动技术,将上一时刻的优化变量作为下一时刻的初始值,提高了在线计算效率。文献[12] 利用移动阻塞策略,假设预测时域内部分控制输入恒定不变并降低待优化变量的维度,简化了预测控制问题计算复杂度,提高了计算效率。然而,這种方法缺乏稳定性保证。文献[13] 提出一种显式MPC 方法,将在线优化问题转化为离线计算和在线查表两部分,通过将传统的模型预测控制系统转换为与之等价的显式多面体分段仿射系统,离线建立从状态量到最优控制律之间的映射关系。但是,这种算法只适用于小规模的低维度系统,对于高维系统其所需存储容量随状态维数增加呈指数增长,严重影响在线查表速度,阻碍此类方法在大规模预测控制问题的进一步应用。
综上所述,应用传统MPC 方法在线求解主动避撞控制这类“多目标”“非线性”“多约束”的问题时,受制于问题复杂度及车载计算资源的影响,控制器往往难以在求解时间与控制性能上做出平衡。为解决上述问题,文献[14] 提出了循环模型预测控制算法(recurrentmodel predective control, RMPC),该算法具有高计算效率和算力自适应能力,可以根据车载计算资源的变化实时调整预测步数,建立状态信息到不同预测步数最优解之间的映射关系,提高预测型车辆主动避撞控制问题的在线求解速度。这种高实时离线求解在线应用控制模式已得到广泛的研究和应用[15-18]。
因此,本文以智能汽车的主动避撞作为研究对象,通过将车辆横向主动避撞控制构建为有限时域预测型最优控制问题,利用RMPC 算法将在线优化问题转化为循环策略参数的离线预求解,提高避撞控制器求解的实时性。最后利用原型控制器和CarSim 平台进行仿真实验,验证避撞场景下算法的避撞效果和计算效率。
其中,aθ 为学习率。通过对参数的不断更新,算法最终会收敛到最优解。
算法伪代码如表1 所示。
图4 展示了RMPC 算法求解主动避撞控制问题的过程,首先将期望轨迹点和障碍物位置等信息离散化后作为控制器输入,利用循环函数对不同预测步数避撞控制问题的最优解进行近似,然后根据目标函数设计参数化的损失函数,并利用梯度下降法更新循环函数,最终得到不同预测步数下的最优解,进而完成主动避撞控制问题的求解。
如图5 所示,循环函数的结构特点使得RMPC 算法可以利用不同循环次数的循环函数对相应预测步数控制问题的最优解进行近似,其中循环次数等于预测步数。循环函数的输入包括2 部分:分别为状态信息和预测时域内的环境信息,其中环境信息又由期望轨迹坐标和障碍物坐标组成。循环函数的输出为最优控制策略。该方法除了可以提高在线计算效率,还可以实现算力自适应的功能。对于一般MPC 控制任务而言,预测步数越多,控制性能越好。因此,循环函数在线应用中,若计算未超时则继续循环计算并保存中间结果,直到时间结束后将最终结果进行输出,从而自适应地得到满足实时性要求的最大循环策略,使得循环次数可由控制器的实际算力决定,计算资源越多,循环次数越多。
3 主动避撞控制器仿真验证
3.1 整体设计
如图6 所示,为验证所提出方法的有效性,首先在PC 机上对循环策略网络进行离线预训练,然后部署到原型控制器上依托CarSim 平台进行仿真验证。控制器根据自车状态以及周车位置信息计算得到控制量并输出控制信号至仿真平台,仿真平台执行相应控制动作后将自车状态信息和周车位置等信息反馈给控制器,实现闭环控制过程。
实验PC 机采用Windows 操作系统,搭载处理器主频为3.4 GHz,具有4 个核心8 个线程的intel i7 处理器。原型控制器采用第6 代intel i7 处理器和QM170芯片组,具有4 个核心8 个线程,主频2.8 GHz。仿真参数如表2、表3 所示。
由于本文主要研究横向主动避撞控制,为简化问题,假定纵向速度的减速度ax = -5 m/s2。此外,由于CarSim 的输出控制量为方向盘转角与制动力矩,而算法输出为前轮转角。根据转向特性得到前轮转角与方向盘转角δsw 之间的关系为δsw = ksw δ,纵向加速度与制动力矩之间关系为Tr = krax,其中: ksw = 18,kr = 127.5 Ns2。
采用GRU 网络建立循环策略參数化表达,通过Adam 方法更新网络参数。网络的输入为系统状态x = [y, ?, vy, ωr]T、环境信息r = [rs, rxa, rya, …, rxf, ryf ]T 及自车纵向速度vx。输出层采用Tanh 函数,输出为最优前轮转角δ。隐层层数为4,采用Relu 函数。学习率设为5×105,训练次数为6×104。如图7 所示,本文针对自车前方突然出现静止障碍物的避撞场景设计了3 种不同初速度的避撞工况,假设仿真开始时自车处于中间车道,初速度分别设为80 、95、10 km/h。每种工况下周车的初始位置随机设置在自车 [-30, 60 ] m 范围内,周车初速度与自车初速度差值为[-25, 15] km/h 内的随机量。
3.2 结果分析
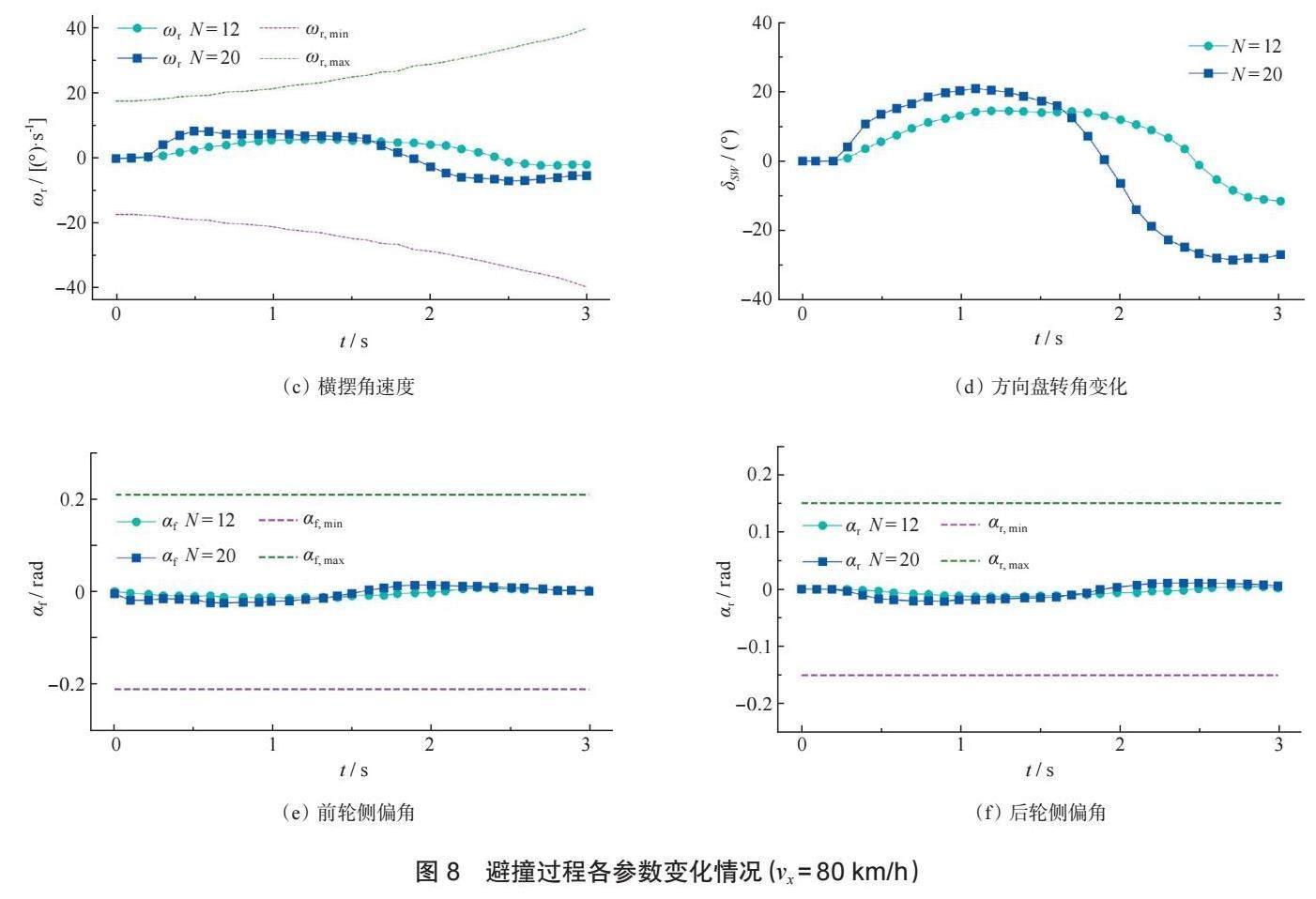
当自车初速度取80 km/h,预测时域取N = 12 和N = 20 时,由图8 可知。在面对前方障碍物时,与12步相比,预测时域为20 步的转向动作更为提前,方向盘转动幅度更大,车辆的横摆角速度以及轮胎侧偏角出现了明显的增加,最大横向位移也由3 m 增大到4 m,避撞过程自车与周车的最小距离随之增大,避撞过程中发生碰撞的风险进一步降低。
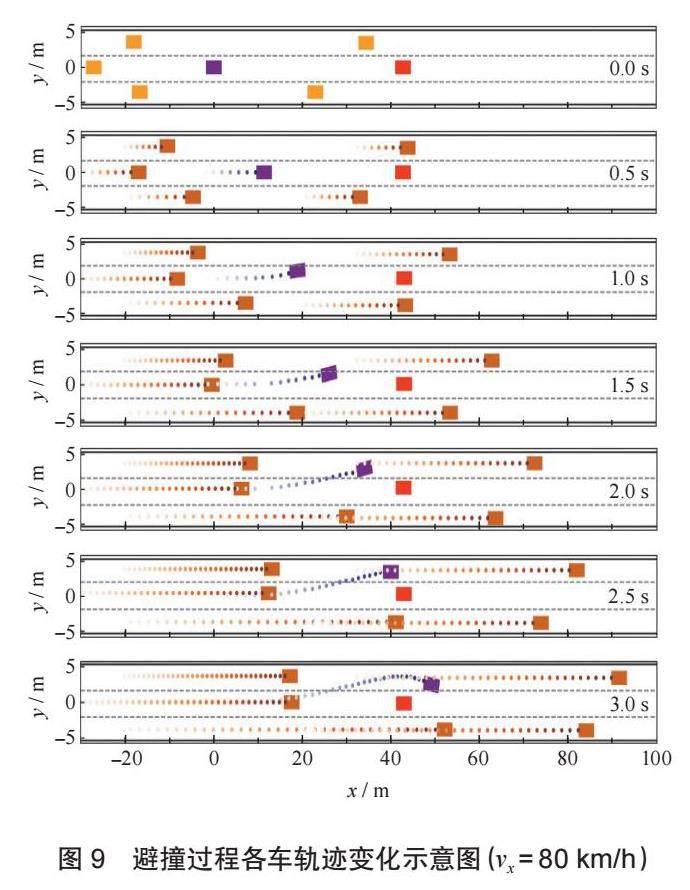
图9 展示了预测时域N = 20 时,避撞过程中各车的轨迹变化情况,其中紫色表示自车,红色表示静止的前车,其余黄框车辆为匀速运动的周车。
经过千次随机交通场景实验,求出不同预测步数下平均的碰撞过程最小车距和千次实验碰撞次数,从表4 可以看出不同预测步数下的避撞效果。
仿真结果表明,随着预测步数的增大,主车在避撞过程中采取避让动作更为提前,幅度也更大,与周车的最小车距也随之增大。在预测步数为12 时,由于避让动作幅度较小,千次实验共发生了44 次碰撞,但当预测步数增加至16 和20 步时,千次实验均未产生碰撞,碰撞风险明显降低。以上结果表明,在满足计算实时性的要求下,增大预测步数控制器可以获得更好的避撞性能,这验证了RMPC 算法在实际避撞场景中具有自适应得到最大预测步数的最优解的能力,同时说明了该算法可以有效满足求解车辆主动避撞这类非线性并带约束的最优控制问题的高实时性要求。
为了进一步验证算法的鲁棒性,将自车纵向初始速度设置为95、110 km/h,自车与前方障碍物距离分别为45、52 m。为获得不同纵向速度下避撞过程的最小车距以及千次试验碰撞次数,设置控制器预测步数为N = 20,在路面附着系数μ = 0.9 情况下,进行千次随机的交通场景实验,结果如表5 所示,可见,在不同纵向速度下RMPC 算法也均获得良好的避撞效果,自车与周车的最小车距均大于1 m,各个速度下的全过程实验中自车与周车均未发生碰撞,反映了该算法具有良好的鲁棒性。
给定一个非线性MPC 问题,可以通过一些在线优化求解器进行直接在线求解,求解得到的数值解可以直接近似最优控制策略。对于式(20)所述的最优控制问题,本文选用了2 个常用的MPC 在线优化求解器BONMIN[21] 和IPOPT[22] 进行直接求解,并分别统计了3 种预测时域下的平均单步求解时间。经过100 次试验,结果如表6 所示,当预测时域等于15 步时,IPOPT 算法耗时为26.4 ms,而RMPC 算法仅耗时4.7 ms,求解速度提升超过5.6 倍,进一步验证了RMPC 算法高实时性。
4 结 论
本文针对复杂交通场景下智能汽车的跟踪避撞任务控制量求解速度较慢的问题,通过引入惩罚函数将约束型预测控制问题转化为无约束控制问题,并利用一种在线计算高效且具备算力自适应能力的显示循环MPC 算法进行策略离线求解。通过仿真实验表明,该算法可以根据计算资源的动态变化自适应调整预测步数,有效减少主动避撞控制器的在线求解的时间,提高避撞过程的安全性。随着预测步数的增加,最小安全车距由0.34 m 提升至1.38 m,千次实验碰撞次数由44下降到0 ;与常用MPC 求解器相比,RMPC 在线计算效率提升超过5.6 倍( 预测步数为15步)。今后考虑建立更为实际的交通流场景描述,引入周车轨迹以及自车车辆模型参数的不确定性,实现更为复杂环境下的智能汽车主动避撞控制。
参考文献(References)
[1] HE Xiangkun, LIU Yulong, et al. Emergency steeringcontrol of autonomous vehicle for collision avoidance andstabilization [J]. Vehi Syst Dyn, 2019, 57(8): 1163-1187.
[2] LIU Zhaoyong, WEN Gaobo, LIU Wudong, et al. Researchon automatic emergency steering collision avoidance andstability control of intelligent driving vehicle [J]. FrontRobot AI, 2023, 10: 1120658.
[3] CHENG Shuo, LI Liang, GUO Hongqiang, et al.Longitudinal collision avoidance and lateral stabilityadaptive control system based on MPC of autonomousvehicles [J]. IEEE T Intel Transport, 2019, 21(6): 2376-2385.
[4] 来飞, 黄超群, 董红亮, 等. 智能汽车极限工况下联合制动与转向的自动紧急避撞研究 [J]. 汽车工程, 2021, 43(6):851-860.
LAI Fei, HUANG Chaoqun, DONG Hongliang, et al.Research on automatic emergency collision avoidanceof intelligent vehicle in extreme condition by combinedbraking and steering control [J]. Autom Engi, 2021, 43(6):851-860. (in Chinese)
[5] 王藝, 蔡英凤, 陈龙, 等. 基于模型预测控制的智能网联汽车路径跟踪控制器设计[J]. 机械工程学报, 2019,55(8): 136-144.
WANG Yi, CAI Yingfeng, CHEN Long, et al. Design ofpath tracking controller for intelligent networked vehiclesbased on model predictive control [J]. Chin J Mech Eng-En, 2019, 55(8): 136-144. (in Chinese)
[6] Nguyen H D, Kim D, et al. Linear time-varying MPCbasedautonomous emergency steering control forcollision avoidance [J]. IEEE T Vehi Tech, Doi: 10.1109/TVT.2023.3269787.
[7] 李耀华, 范吉康, 刘洋, 等. 自适应双时域参数MPC 的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报,2021, 12(4): 528-539.
LI Yaohua, FAN Jikang, LIU Yang, et al. Intelligentvehicle path planning and tracking control with adaptivedual time domain parameter MPC [J]. J Autom SafeEnerg, 2021, 12(4): 528-539. (in Chinese)
[8] 任玥, 郑玲, 张巍, 等. 基于模型预测控制的智能车辆主动避撞控制研究[J]. 汽车工程, 2019, 41(4): 404-410.
REN Yue, ZHENG Ling, ZHANG Wei, et al. Researchon active collision avoidance control of Intelligent vehiclebased on model predictive control [J]. Autom Engi, 2019,41(4): 404-410. (in Chinese)
[9] GUO Hongyan, SHEN Chen, ZHANG Hui, et al.Simultaneous trajectory planning and tracking using anMPC method for cyber-physical systems: A case study ofobstacle avoidance for an intelligent vehicle [J]. IEEE T Ind Info, 2018, 14(9): 4273-4283.
[10] Abbas M A, Milman R, Eklund J M. Obstacle avoidancein real time with nonlinear model predictive control ofautonomous vehicles [J]. Can J Elect Comput E, 2017,40(1): 12-22.
[11] Zeilinger M N, Raimondo D M, Domahidi A, et al. Onreal-time robust model predictive control [J]. Automatica,2014, 50(3): 683-694.
[12] Cagienard R, Grieder P, Kerrigan E C, et al. Moveblocking strategies in receding horizon control [J]. JProcess Contr, 2007, 17(6): 563-570.
[13] 冷姚, 趙树恩. 智能车辆横向轨迹跟踪的显式模型预测控制方法[J]. 系统仿真学报, 2021, 33(5): 1177-1187.
LENG Yao, ZHAO Shuen. Explicit model predictivecontrol method for lateral trajectory tracking of intelligentvehicle [J]. J Simulate, 2021, 33(5): 1177-1187. (in Chinese)
[14] LIU Zhengyu, DUAN Jiangliang, WANG Wenxuan, et al.Recurrent model predictive control: Learning an explicitrecurrent controller for nonlinear systems [J]. IEEE T IndElectron, 2022: 10437-10446.
[15] LI Shengbo. Reinforcement Learning for SequentialDecision and Optimal Control [M]. Springer Verlag,Singapore, 2023: 26-37.
[16] GUAN Yang, REN Yangang, SUN Qi, et al. Integrateddecision and control: toward interpretable andcomputationally efficient driving intelligence [J]. IEEE TCybernet, 2022, 53(2): 859-873.
[17] DUAN Jiangliang, LI Jie, GE Qiang, et al. Relaxed actorcriticwith convergence guarantees for continuous-timeoptimal control of nonlinear systems [J]. IEEE T IntelVehi, 2023, Doi: 10.1109/TIV.2023.3255264.
[18] DUAN Jiangliang, LI Shengbo, GUAN Yang, et al.Hierarchical reinforcement learning for self-drivingdecision-making without reliance on labelled driving data[J]. IET Intel Transport Symp, 2020, 14(5): 297-305.
[19] Kong J, Pfeiffer M, Schildbach G, et al. Kinematic anddynamic vehicle models for autonomous driving controldesign [C]// IEEE Intel Vehi Symp. IEEE, 2015: 1094-1099.
[20] Erlien S M, Fujita S, Gerdes J C. Shared steering controlusing safe envelopes for obstacle avoidance and vehiclestability [J]. IEEE T Intel Transport, 2016, 17(2): 441-451.
[21] Andersson J A E, Gillis J, Horn G, et al. CasADi: asoftware framework for nonlinear optimization andoptimal control [J]. Math Program Comput, 2019, 11:1-36.
[22] Biegler L T, Zavala V M. Large-scale nonlinearprogramming using IPOPT: An integrating framework forenterprise-wide dynamic optimization [J]. Comput ChemEngi, 2009, 33(3): 575-582.
猜你喜欢
中国科技博览(2018年7期)2018-02-09 00:48:11
科技创新与应用(2017年32期)2017-11-06 09:29:00
科学与财富(2017年28期)2017-10-14 14:15:17
科学家(2017年11期)2017-07-29 21:04:15
中国新技术新产品(2017年13期)2017-07-12 17:15:56
科技与创新(2017年11期)2017-07-01 20:04:09
电子技术与软件工程(2017年9期)2017-06-03 00:33:03
创新科技(2017年2期)2017-05-10 00:27:13
科技传播(2017年5期)2017-04-25 23:28:30
电子技术与软件工程(2017年3期)2017-03-22 02:18:00
