一种GNSS/5G抗差滤波联合定位算法
2023-04-28 06:20:24刘宝山曾凌川巩应奎
导航定位学报 2023年2期
刘宝山,曾凌川,巩应奎,刘 婷,袁 洪
一种GNSS/5G抗差滤波联合定位算法
刘宝山1,2,曾凌川1,巩应奎1,刘 婷1,袁 洪1
(1. 中国科学院 空天信息创新研究院, 北京 100094;2. 中国科学院大学, 北京 100049)
针对当前在城市峡谷等复杂场景中,第5代移动通信技术(5G)和全球卫星导航系统(GNSS)联合定位缺乏定位鲁棒性的问题,提出一种基于抗差滤波的GNSS/5G联合定位算法:分别基于GNSS的伪距观测量和5G信号的到达时间差(TDOA)观测量,构造GNSS和5G的联合定位方程;然后在扩展卡尔曼滤波(EKF)基础上,构造抗差扩展卡尔曼滤波(抗差EKF)算法。实验结果表明,在GNSS定位精度较差的城市峡谷场景中,单独采用GNSS伪距的静态定位精度为12.65 m,动态定位精度为6.43 m,其中静态实验的定位精度较差;采用EKF算法时,GNSS/5G组合静态定位精度为4.33 m,动态定位精度为6.60 m,采用抗差EKF算法时,GNSS/5G组合静态定位精度为4.26 m,动态定位精度为5.42 m;GNSS/5G组合抗差滤波算法定位精度优于单独使用GNSS伪距进行EKF解算和GNSS/5G使用EKF进行解算的定位精度。
第5代移动通信技术(5G);全球卫星导航系统(GNSS);融合定位;卡尔曼滤波;到达时间差(TDOA)
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)本身具有全天候、全天时、高精度、覆盖范围广等显著优势,已广泛应用于交通运输、军事、测绘、精细农业等各种领域[1]。然而,在城市峡谷、室内外过渡区域、室内区域等场景中,由于接收GNSS卫星信号数量有限,导致导航信号较弱,且易受非视距信号(non line of sight,NLOS)、多路径效应等影响,用户定位效果显著降级,难以满足复杂场景下的导航定位需求[2]。于是,基于各类地面定位基站的定位技术,包括无线保真技术(wireless fidelity,WiFi)、蓝牙、超宽带、移动通信蜂窝网络等,逐渐成为当前常见的辅助定位技术,用于在GNSS定位精度较低的场景中进行辅助定位[3]。其中,第5代移动通信技术(the fifth generation of mobile communication technologies,5G)是其中最具大规模应用潜力的手段之一。当前5G通信系统在设计过程中已考虑了定位性能,并明确在第16版(release 16,Rel-16)协议中引入了专用的定位参考信号(position reference signal,PRS)以实现通导一体化[5]。5G PRS信号具有毫米波、高速率、大带宽、大容量、低时延、高可靠等特点,结合多进多出(multiple in multiple out,MIMO)、密集组网等新技术,其定位精度在理论上能够达到亚米级甚至分米级[4]。随着5G通信技术的大规模推广应用,业界普遍认为在城市峡谷等GNSS定位精度不足的复杂场景下,采用5G信号辅助导航定位将成为一种可行的选择。
目前,针对5G信号独立进行导航定位方面,已有若干研究团队进行了相关研究。5G信号的利用方式沿用了地面基站定位中的到达时间(time of arrival,TOA)、到达时间差(time difference of arrival,TDOA)、到达角(angle of arrival,AOA)的算法思路。文献[6]研究了5G毫米波的TDOA定位算法,对比分析了Chan算法、泰勒级数展开法和顾及基站与接收机时间差的线性位置线(linear line of position,LLOP)算法3种算法在静态和动态环境中的定位效果;文献[7]研究了5G网络中的TOA/AOA联合定位方法,通过将基站的时间同步误差建模为一个确定的未知数,采用泰勒展开最小二乘方法进行位置解算。
同时,针对5G信号辅助GNSS导航定位方面,也已经有若干团队进行了相关研究。文献[8]在GNSS和5G的联合定位研究中,选取了GNSS的TOA观测量和5G的AOA观测量进行位置解算,仿真结果表明这种定位方式要优于单独的AOA定位解算;文献[9]利用实测数据研究了北斗卫星导航系统(BeiDou navigation satellite system,BDS)与5G的联合定位,利用最小二乘法求解了观测方程,获得定位结果;文献[10]研究了卫星遮挡环境下GNSS与5G的定位算法,比较了基站数量、几何配置等因素对定位性能的影响;文献[11]研究了GNSS与5G的融合定位,同时利用了5G信号的TOA、信号强度等信息,并采用粒子滤波方式对GNSS与5G的数据进行融合;文献[12]针对5G测量噪声不确定性较大的特点,提出了一种多速率自适应滤波方法,应用到GNSS与5G的融合定位中,取得了较好效果。
实际应用中5G信号传播极易受多径衰落影响,定位结果大概率存在粗差,但上述相关研究或者没有针对粗差问题提出相应的解决方案,或者存在算法复杂、计算量大等问题。针对上述不足之处,本文提出将GNSS和5G伪距观测方程分别表达为TOA和TDOA的形式,形成GNSS/5G联合定位解算方程组;然后基于大地测量与地球物理研究所3号(Institute of Geodesy and Geophysics III,IGGIII)抗差权函数[13]构造抗差扩展卡尔曼滤波(extended Kalman filter,EKF)数学模型。
1 GNSS/5G联合定位方程
对GNSS观测方程进行建模和整理,观测方程可表示为

对于城市峡谷等GNSS定位精度不足的场景,可加入5G测距作为辅助观测方程完成用户定位解算。对5G测距的TOA观测方程进行建模[14],观测方程可表示为

5G接收模块的钟差在TOA观测方程相减的过程中被消去;TDOA观测方程中产生了新的误差参数,参数可表示为

2 算法原理
2.1 EKF数学模型
对于上述非线性形式的5G/GNSS联合定位观测方程,目前通常采用EKF算法实现相应的融合解算。非线性系统模型通常可表示为

EKF的求解过程总结如下:





应用卡尔曼滤波进行动态导航定位时,需要建立比较合理准确的运动模型。本文采用常速度(constant velocity,CV)模型,系统状态参数中包括载体的位置、速度参数,同时也包括GNSS接收机钟偏的等效距离和钟漂的等效速度、5G基站测距TDOA观测方程中时间同步误差的等效距离。
2.2 抗差EKF数学模型
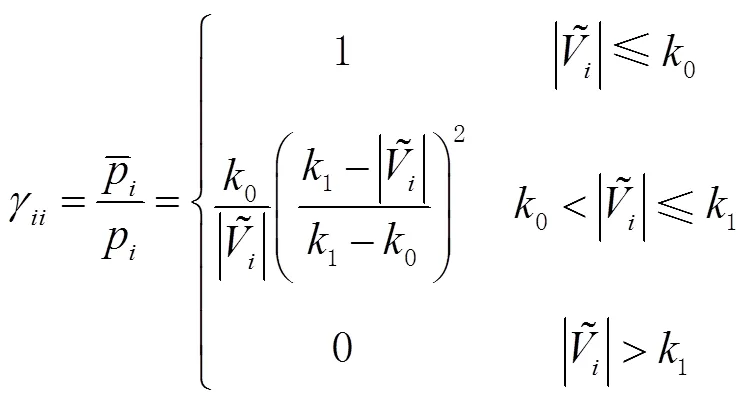
当观测样本遭受异常污染时,单个观测值的粗差都可能明显降低系统的定位精度[15]。针对这种情况,在上述EKF滤波算法的基础上,可采用抗差M-估计理论,降低异常数据的权重,保证定位稳定性。在实践中,可直接构造相应的抗差等价权函数。通常选用IGGIII权函数作为等价权函数[13]。IGGIII权函数的具体表达式为
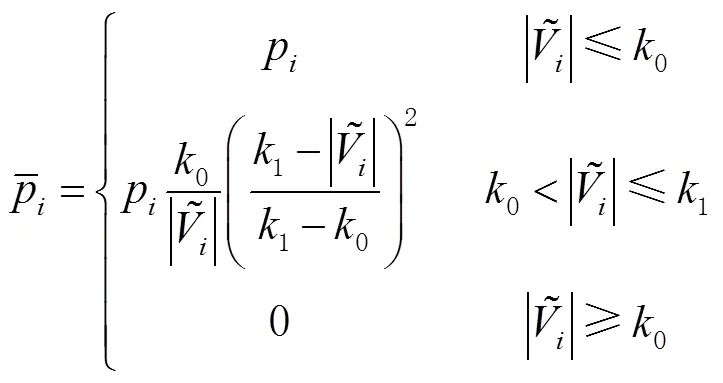
由式(12)可知,IGGIII权函数为分段函数,其主要作用如下:对于正常观测数据,赋予正常权重;对于疑似异常的观测数据,适当降低其权重,减小其对定位结果产生的影响;当观测数据出现非常大的偏差时,将其判定为异常观测数据,并赋予0权重,使其对定位结果产生的影响降到最低。通过使用该权函数,可以降低粗差等异常数据对定位结果的影响,保证定位结果的稳定性。


3 实验与结果分析
为充分验证本文提出的基于抗差滤波的GNSS/5G的联合定位算法,构建了实际的实验场地对算法定位效果进行验证。实验场地如图1所示,终端位于2栋建筑之间的平台,由于南北二侧建筑物遮挡,GNSS信号的多路径效应较为显著,导致定位精度相对开阔场景有所降低。在南北二侧楼房内,共部署了4个5G定位基站,确保终端能够收到各个基站的定位信号。

图1 实验场地实地远视图

3.1 5G测量数据质量分析
在进行GNSS/5G联合定位之前,首先对4个5G基站的测距数据质量进行分析,以获取5G定位信号误差协方差矩阵初值。测试情况如表1所示。由表1可见,5G定位的TDOA数据误差基本服从高斯分布,但其均值不为0,主要是因为第2个、第3个、第4个5G基站和第1个5G基站之间存在系统性的时间同步偏差。根据各个TDOA数据误差得出对应的时间同步误差。3组基站间的时间同步偏差均在3 ns内,即4个5G基站与终端之间的测距精度约为0.3 m,基本能够满足辅助定位的需要。

表1 TDOA误差数据分析结果
3.2 静态实验数据分析
在静态实验中,在固定点位处架设GNSS接收机和5G接收模块,进行定位数据的采集,利用不同算法对数据进行处理,并与RTK高精度定位设备进行对照,计算均方根误差(root mean square error,RMSE)。以下分别是单独使用GNSS伪距的EKF定位、GNSS/5G的EKF定位、GNSS/5G的抗差滤波定位的效果。
图2所示是单独使用GNSS伪距进行EKF算法处理时东、北、天向的误差曲线。该组定位结果的东向RMSE为2.75 m,北向RMSE为4.53 m,天向RMSE为11.48 m,总体定位RMSE为12.65 m。图2中,GPS(global positioning system)为全球定位系统。
由图1可以看到实验场地属于城市峡谷类的复杂场景,场地二侧的建筑物使得GNSS信号的NLOS与多路径效应较为严重,单独使用GNSS伪距的EKF定位在这种情况下定位精度较低。

图2 单独使用GNSS伪距时EKF算法静态定位误差曲线
图3是GNSS/5G定位的数据使用EKF算法进行处理时东、北、天向的定位误差曲线。该组定位结果东向RMSE为2.28 m,北向RMSE为2.46 m,天向RMSE为2.74 m,总体定位RMSE为4.33 m。从图中可以看出,由于5G测距的辅助定位作用,系统的整体定位精度得到了提升。同时由于5G测距数据受到NLOS、多路径效应等影响,这组定位结果中仍存在着异常的尖峰数据,对定位精度产生影响。

图3 GNSS伪距与5G测距时EKF算法静态定位误差曲线
图4是经过抗差滤波处理后的GNSS/5G定位时东、北、天向的定位误差曲线。该组定位结果的东向RMSE为2.09 m,北向RMSE为2.55 m,天向RMSE为2.69 m,总体定位RMSE为4.26 m。从图中可以看出,GNSS/5G联合定位标准EKF算法结果的粗差已在抗差滤波算法的实验结果中被消除。抗差滤波较好地对该异常尖峰数据进行了处理,提高了定位系统的稳定性。

图4 GNSS伪距与5G测距时抗差滤波算法静态定位误差曲线
同时,在静态数据实验中,对单独使用GNSS和使用GNSS/5G测距定位中的位置精度因子(position dilution of precision,PDOP)进行了相关比对,绘制的精度衰减因子曲线如图5所示。由图5可知,5G辅助定位基站的引入大大降低了定位系统的PDOP值,提高了定位精度。

图5 静态实验中单GNSS与GNSS/5G的PDOP值曲线比对
3.3 动态实验数据分析
在动态实验中,在可移动平台上架设GNSS接收机和5G信号接收终端进行动态数据采集,利用不同算法对数据进行处理。
图6为单独利用GNSS进行定位的动态定位结果。图6(b)、图6(c)、图6(d)分别为东、北、天向的定位误差曲线。该组定位结果的东向RMSE为3.26 m,北向RMSE为3.24 m,天向RMSE为4.49 m,总体定位RMSE为6.43 m。从图6(a)中可以看出,轨迹在垂直于建筑方向上出现了抖动,水平方向的定位效果受到了影响。
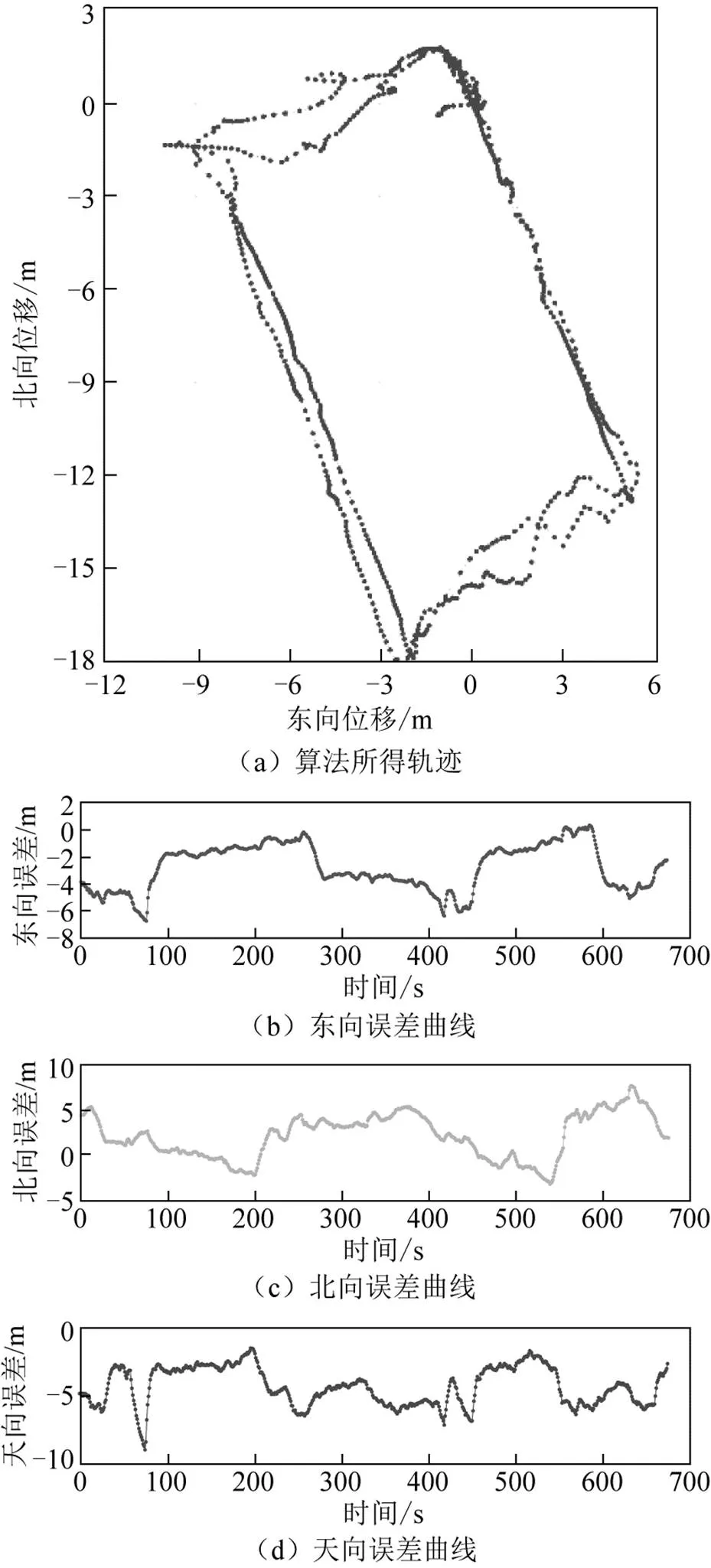
图6 单独使用GNSS伪距时EKF算法动态数据的轨迹及误差曲线
图7为该组动态数据利用GNSS/5G测距进行EKF解算的动态定位结果。图7(b)、图7(c)、图7(d)分别为东、北、天向的定位误差曲线。该组定位结果的东向RMSE为2.70 m,北向RMSE为2.51 m,天向RMSE为5.47m,总体定位RMSE为6.60 m。从图7(a)中轨迹可以看出,5G测距信息的引入能够减小垂直于建筑方向上的轨迹抖动,提高了水平方向的定位效果。单GNSS定位的水平方向定位RMSE为4.60 m,GNSS/5G联合定位的水平方向RMSE为3.69 m,水平定位精度提升了19.60%。但是5G测距信息的引入使得天向方向的误差受到了较大影响,精度出现劣化。分析考虑,5G基站部署时未考虑几何构型对定位的影响,使得TDOA在天向方向的定位精度较差。综合以上可以得出5G测距TDOA数据信息的引入提高了水平方向的定位效果,但垂直方向误差会受到影响。

图7 GNSS伪距与5G测距时EKF算法动态数据的轨迹及误差曲线
图8为该组动态数据利用GNSS/5G测距进行抗差EKF解算的动态定位结果。图8(b)、图8(c)、图8(d)分别为东、北、天向的定位误差曲线。该组定位结果的东向RMSE为2.73 m,北向RMSE为2.29 m,天向RMSE为4.08 m,总体定位RMSE为5.42 m,水平方向RMSE为3.56 m。从定位结果中可以看到,抗差滤波算法减小了5G测距TDOA观测量对垂直方向定位的影响,提升了整体的定位精度,验证了抗差滤波算法的有效性。
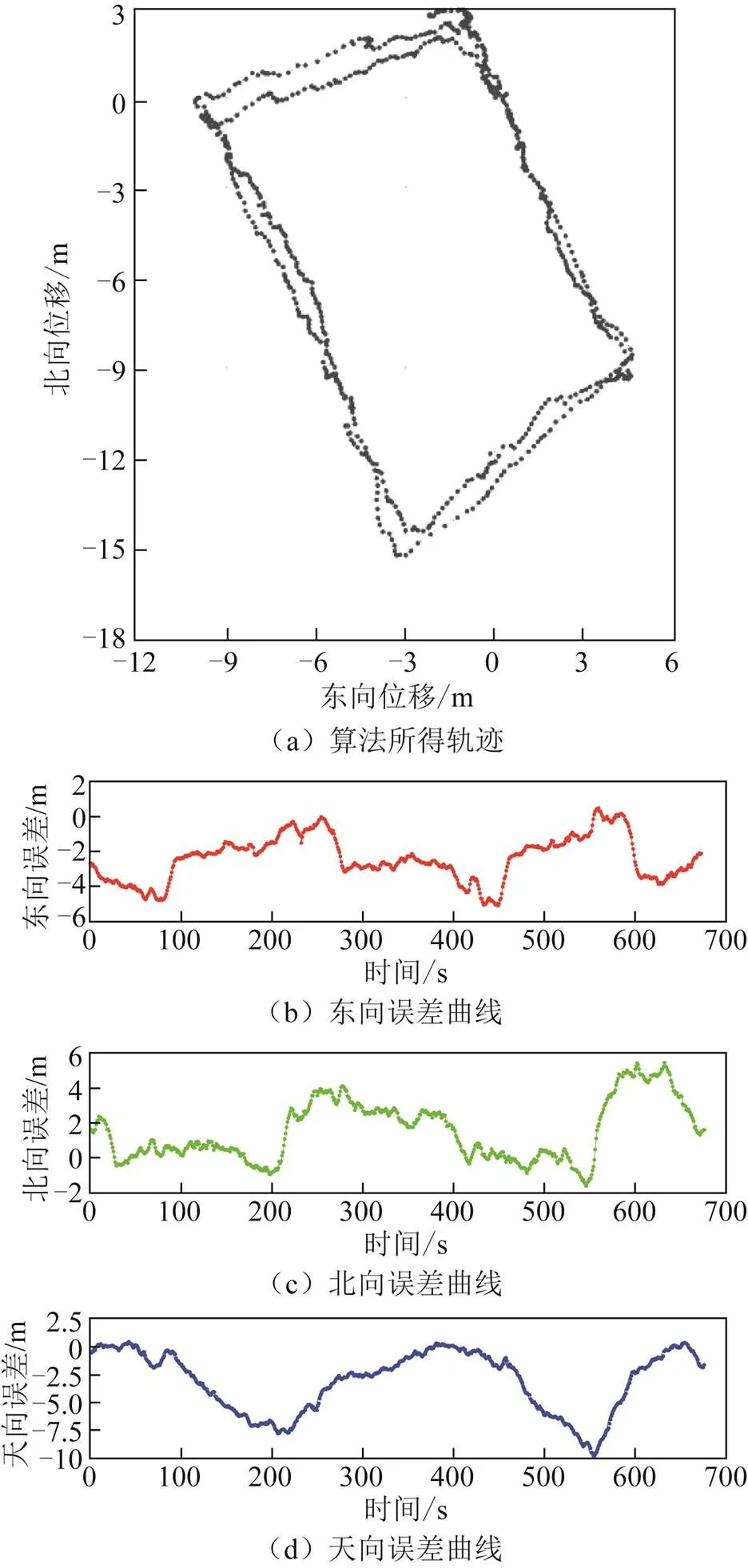
图8 GNSS伪距与5G测距时抗差EKF算法动态数据的轨迹及误差曲线
4 结束语
本文首先实现了基于EKF算法的GNSS/5G定位数据融合解算。之后,在标准EKF算法的基础上构建了抗差滤波算法,以减小异常数据对定位精度的影响。本文搭建了实验场地收集实测数据,利用GNSS和5G的观测数据验证了定位算法的效果。静态定位时单独使用GNSS伪距解算定位精度为12.65 m,GNSS/5G的EKF解算定位精度为4.33 m,抗差滤波解算定位精度为4.26 m;动态定位时单独使用GNSS伪距进行解算的定位精度为6.43 m,GNSS/5G的EKF解算定位精度为6.60 m,抗差滤波解算定位精度为5.42 m。GNSS/5G抗差滤波的定位结果优于单独使用GNSS伪距进行EKF定位和GNSS/5G使用EKF进行定位的结果。同时,抗差滤波算法也很好地对粗差数据进行了剔除,保证了定位结果的稳定性。本文设计的联合定位算法能够满足行人等在城市峡谷等复杂遮挡环境下静态定位4 m精度、动态定位5 m精度的定位需求。
[1] 李征航, 黄劲松. GPS测量与数据处理[M]. 武汉: 武汉大学出版社, 2016: 181.
[2] SECO-GRANADOS G, LÓPEZ-SALCEDO J, JIMÉNEZ-BAÑOS D, et al. Challenges in indoor global navigation satellite systems: Unveiling its core features in signal processing[J]. IEEE Signal Processing Magazine, 2012, 29(2): 108-131.
[3] 王慧强, 高凯旋, 吕宏武. 高精度室内定位研究评述及未来演进展望[J]. 通信学报, 2021, 42(7): 198-210.
[4] 尹露, 马玉峥, 李国伟, 等. 通信导航一体化技术研究进展[J]. 导航定位与授时, 2020, 7(4): 64-76.
[5] 刘海蛟, 刘硕, 刘文学, 等. 北斗+5G融合定位技术研究[J]. 信息通信技术与政策, 2021, 47(9): 41-46.
[6] 李芳馨, 涂锐, 韩军强, 等. 基于5G毫米波到达时间差的室内定位算法[J]. 全球定位系统, 2021, 46(2): 1-6.
[7] BAI Lu, SUN Chao, ZHAO Hongbo, et al. A TOA-AOA hybrid localization method in 5G network with MIMO antennas[C]//Academic Exchange Center of China Satellite Navigation Office. Proceedings of 2021 China Satellite Navigation Conference (CSNC). Singapore: Springer, 2021: 285-295[2022-05-18].
[8] SUN C, ZHAO H B, BAI L, et al. GNSS-5G hybrid positioning based on TOA/AOA measurements[C]//Academic Exchange Center of China Satellite Navigation Office. Proceedings of 2020 China Satellite Navigation Conference (CSNC) 2020: Volume III. Singapore: Springer, 2020: 527-537[2022-05-18].
[9] 薛嘉琛, 武建锋, 焦喜康, 等. 一种基于北斗+5G的联合定位系统[J/OL]. 无线电工程: 1-9[2022-02-19]. http://kns.cnki.net/kcms/detail/13.1097.TN.20211224.1513.012.html.
[10] LI Fangxin, TU Rui, HONG Ju, et al. Combined positioning algorithm based on BeiDou navigation satellite system and raw 5G observations[J]. Measurement, 2022, 190: 1-14.
[11] ZHANG Wei, YANG Yuanxi, ZENG Anmin, et al. A GNSS/5G integrated three-dimensional positioning scheme based on D2D communication[J]. Remote Sensing, 2022, 14(6): 1-20.
[12] BAI L, SUN C, DEMPSTER A G, et al. GNSS-5G hybrid positioning based on multi-rate measurements fusion and proactive measurement uncertainty prediction[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-15.
[13] 杨元喜. 抗差估计理论及其应用[M]. 北京: 八一出版社, 1993: 107-108.
[14] DEL PERAL-ROSADO J A, RENAUDIN O, GENTNER C, et al. Physical-layer abstraction for hybrid GNSS and 5G positioning evaluations[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of 2019 IEEE 90th Vehicular Technology Conference, W5: Reliable Ubiquitous Navigation in Smart Cities. Palms Springs: IEEE, 2019:1-6[2022-05-18] .
[15] 杨元喜. 自适应动态导航定位[M]. 北京: 测绘出版社, 2017:95.
An algorithm of GNSS/5G robust filtering joint positioning
LIU Baoshan1,2, ZENG Lingchuan1, GONG Yingkui1, LIU Ting1, YUAN Hong1
(1. Aerospace Information Research Institute, Chinese Academy of Sciences, Beijing 100094, China;2. University of Chinese Academy of Sciences, Beijing 100049, China)
Aiming at the problem that the joint positioning of the fifth-generation mobile communication technologies (5G) and global navigation satellite system (GNSS) is lack of positioning robustness in complex scenes such as urban canyons, the paper proposed a joint positioning algorithm of GNSS/5G based on robust filtering: the joint positioning equations of GNSS/5G were established based on the pseudorange observations of GNSS and the time difference of arrival (TDOA) observations of 5G signals, respectively; then, based on the extended Kalman filter (EKF), the robust EKF was constructed. Experimental results showed that in the urban canyon scene with poor GNSS positioning accuracy, the static positioning accuracy by using GNSS pseudorange alone would be 12.65 m, and the dynamic positioning accuracy 6.43 m, indicating the poorer positioning accuracy of the static experiment; GNSS/5G using the EKF algorithm would have a static positioning accuracy of 4.33 m and a dynamic positioning accuracy of 6.60 m, while using the robust EKF algorithm, the static positioning accuracy would be 4.26 m and the dynamic positioning accuracy 5.42 m; moreover, it could be known that using the GNSS/5G robust EKF algorithm would be superior to both using GNSS pseudoranges alone and using GNSS/5G EKF algorithm in positioning accuracy.
the fifth generation of mobile technologies (5G); global navigation satellite system (GNSS); integrated positioning; Kalman filter; time difference of arrival (TDOA)
P228
A
2095-4999(2023)02-0139-08
刘宝山, 曾凌川, 巩应奎, 等. 一种GNSS/5G抗差滤波联合定位算法[J].导航定位学报, 2023, 11(2):139-146.(LIU Baoshan, ZENG Lingchuan, GONG Yingkui, et al. An algorithm of GNSS/5G robust filtering joint positioning[J]. Journal of Navigation and Positioning, 2023, 11(2): 139-146.)DOI:10.16547/j.cnki.10-1096.20230216.
2022-05-20
国家自然科学基金项目(91438207)
刘宝山(1998—),男,山东高唐人,硕士研究生,研究方向为多源融合定位。
巩应奎(1974—),男,山西平遥人,博士,研究员,研究方向为智能可信导航、空间信息处理。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
测绘科学与工程(2017年3期)2017-08-16 02:46:08
测绘科学与工程(2017年1期)2017-05-04 03:40:44
测绘通报(2016年12期)2017-01-06 03:37:13
地理与地理信息科学(2015年4期)2015-10-13 08:29:15
电力建设(2015年2期)2015-07-12 14:15:59
导航定位学报(2015年2期)2015-06-05 09:27:38
测绘科学与工程(2014年4期)2014-02-27 07:06:08