考虑动态频率响应的风光水互补发电短期优化调度模型
2023-04-12 00:00:00张秋艳谢俊潘学萍刘明涛肖宇泽冯丽娜
太阳能学报 2023年1期
关键词:频率响应



























DOI:10.19912/j.0254-0096.tynxb.2021-0970 文章编号:0254-0096(2023)01-0516-09
摘 要:针对风光并网会降低系统惯量、削弱系统调频能力的问题,综合考虑水电机组同步惯量、风电场和光伏电站的虚拟惯量和下垂控制作用,提出含风光水的多机系统动态频率响应模型,推导系统频率变化率约束、最低点频率偏差约束和准稳态频率偏差约束。基于此,为实现清洁能源利用最大化,以弃风、弃光、弃水最小及水库调度期末蓄能最大为目标,兼顾梯级水电、风电、光伏和发电系统的多种运行约束,构建风光水互补发电系统短期优化调度模型,并使用混合整数线性规划方法进行求解。最后通过算例仿真验证所提模型的有效性和适用性。
关键词:虚拟惯量;下垂控制;频率响应;风光水互补发电;混合整数线性规划
中图分类号:TM721" " " " " " " " " " " " " " "文献标志码:A
0 引 言
随着“碳达峰、碳中和”的规划部署,风电、光伏等可再生能源并网成为电力系统的研究热点[1]。风电和光伏机组通过逆变器并网,与电网频率完全解耦,难以提供转动惯量,导致系统惯量水平降低,频率响应能力减弱[2]。因此,在系统优化调度中考虑动态频率响应,对电网安全稳定运行具有重要意义。针对风光并网后系统频率稳定问题,国内外已开展相关研究。文献[3]在机组组合中加入由系统动态频率响应模型推导的最低点频率约束,通过优化在线同步机组的数量,提高系统惯量响应和一次频率响应的能力;文献[4-7]进一步考虑了频率变化率约束和准稳态频率约束。
但上述研究仅考虑火电机组的频率响应特性,风电、光伏并未参与惯性响应。研究发现,风力涡轮机能模拟传统机组的惯量和下垂控制,从而改变整个系统的频率特性[8-10]。文献[11]计及风电虚拟惯性响应和一次调频响应,提出改进平均系统频率模型,但其一次调频采用静态模型,仅反映稳态频率偏差大小。文献[12]研究了同步惯量与风电场虚拟惯量对系统最优容量组合的影响,但仅考虑了系统的最小惯量需求约束;文献[13]在风电机组提供虚拟惯量和下垂控制基础上,将系统惯性响应、一次调频和二次调频过程中的动态频率约束融入到机组组合模型中,通过合理安排机组启停提高系统频率响应特性;文献[14]提出考虑频率安全裕度的机组组合模型,分析了可再生能源占比对系统频率安全的影响;文献[15]建立了考虑风电提供频率和负荷支撑作用的负荷恢复优化方法,计及风电机组虚拟惯性响应和一次调频控制过程。
对于光伏发电系统的低惯量问题,多数研究通过改变虚拟同步机控制策略,提升其频率响应能力[16-17]。但上述研究只侧重于风火互补发电系统或光伏发电系统,应用场景较单一。水电机组开停机迅速、灵活性强,是助推碳达峰和碳中和的重要途径之一,但目前针对考虑频率响应的含水电的系统调度研究很少。基于此,本文计及水电机组的同步惯量及风电场和光伏电站的虚拟惯量和下垂控制作用,建立考虑动态频率响应的含梯级水电的风光水互补发电短期优化调度模型,并将所建立的模型进行混合整数线性化。算例分析验证模型的有效性和适用性。
1 系统动态频率响应建模
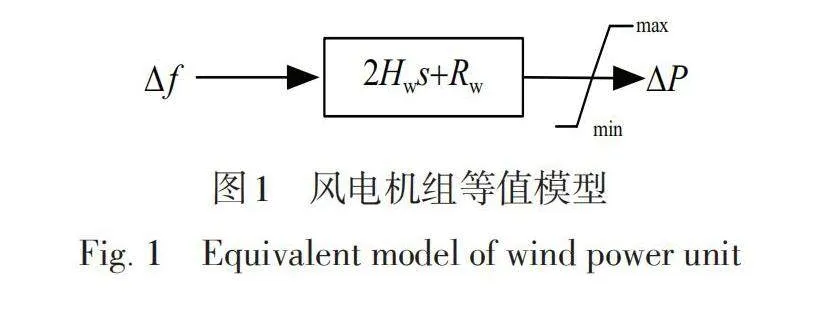
衡量系统频率响应的动态指标主要有频率变化率、最低点频率、准稳态频率[6]。图1为风电机组通过虚拟惯量和下垂控制参与频率调整的等值模型[13]。图1中,[Hw]、[Rw]分别为风电机组的虚拟惯性时间常数、下垂控制系数。
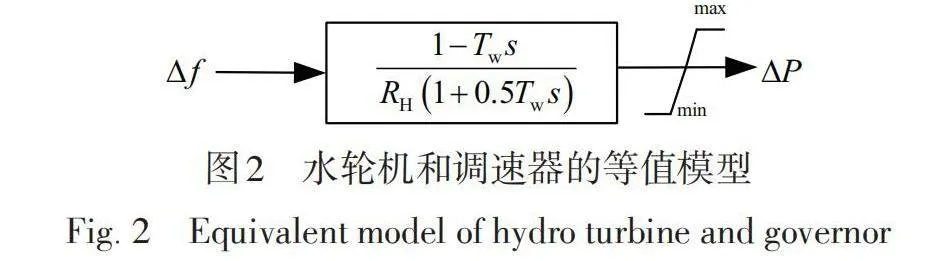
光伏机组与风电机组通过逆变器接入电网,故两者采用相同的等值结构模型。图2为理想水轮机及调速器的等值简化模型[18]。图2中,[Tw]、[RH]分别为水轮机等值水流时间常数、等值调差系数。
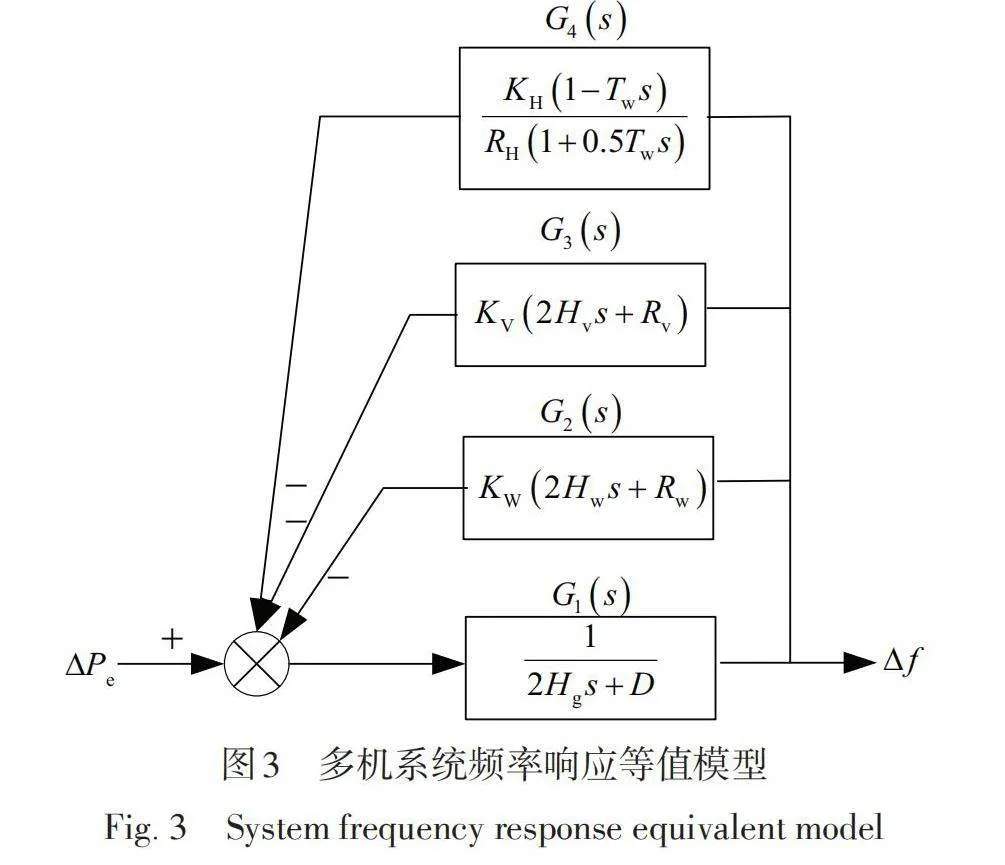
由此得到多机系统动态频率响应等值模型,如图3所示。图3中,[Hv]、[Rv]分别为光伏机组的虚拟惯性时间常数和下垂控制系数,[Hg]、[D]分别为系统惯性时间常数和阻尼系数。引入机械功率增益[KH]、[KW]、[KV],能更精确的表示水电、风电以及光伏机组的调频能力。
根据图3,得到系统的传递函数表达式为:
多机系统传递函数为:
其中:
当系统出现功率缺额,如失去一台发电机时,此过程可看作阶跃响应,即[ΔPe=-ΔP/s],因此[ΔFs=ΔPeGs],对其进行拉普拉斯反变换,得到系统频率响应的时域表达式:
式中:[ϕ=w2n-ξ2w2n]。
基于式(3),确定系统动态指标,即频率变化率[fmax·]、最低点频率偏差[Δfmax]、准稳态频率偏差[Δfss]。
1)频率变化率
系统受到扰动后,惯性响应立即作用,此时发电机调速器尚未动作,频率变化率[dΔft/dt]完全取决于系统惯量。0时刻时,频率下降最大。对式(3)求导,并令[t=0],求得系统频率变化率为:
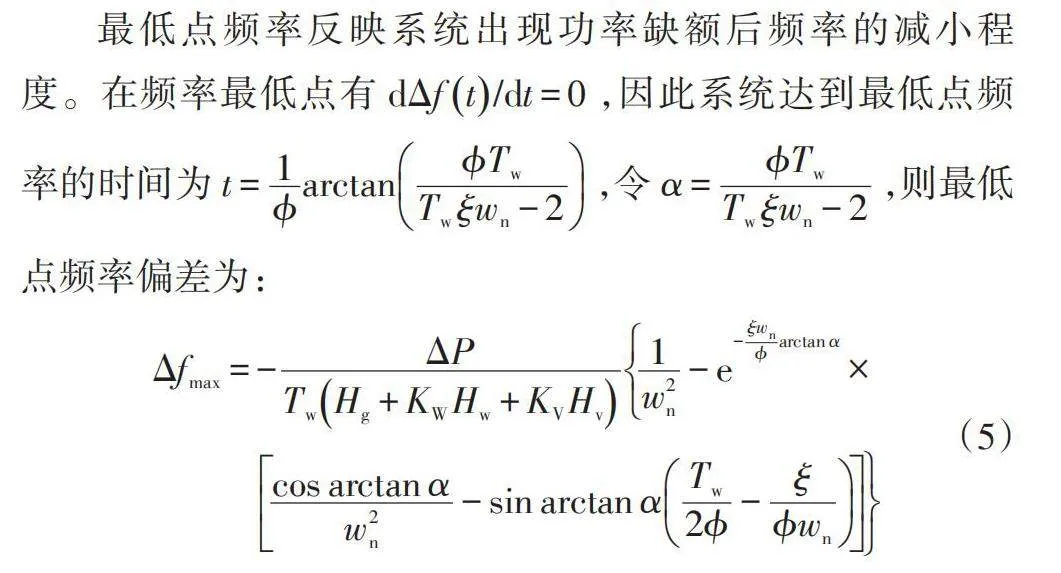
2)最低点频率偏差
最低点频率反映系统出现功率缺额后频率的减小程度。在频率最低点有[dΔft/dt=0],因此系统达到最低点频率的时间为[t=1ϕarctanϕTwTwξwn-2],令[α=ϕTwTwξwn-2],则最低点频率偏差为:
3)准稳态频率偏差
频率达到准稳态时,有[dΔft/dt=0,][Δft=a,]其中[a]为一恒定频率。由终值定理,求得系统准稳态频率偏差[Δfss=lims→0sFs],即:
当系统发生功率扰动,上述频率指标应满足约束[6]:
式中:[fb]——系统额定频率,Hz;[flim·]——最大允许频率变化率,Hz/s;[Δflim]——低频减载触发频率,Hz;[Δfss,lim]——最大允许准稳态频率偏差,Hz。
2 系统短期优化调度模型
2.1 目标函数
为提高清洁能源利用率,模型以弃风、弃光、弃水量最小及水库调度期末蓄能最大为目标:
式中:[c]——场景编号;[Sc]——场景总数;[πc]——场景概率;[t]——时段编号;[T]——总时段数;[w]、[v]、[hp]——风电场、光伏电站、水电站编号;[NW、][NV、][NHP]——风电场、光伏电站、水电站总数;[AWc,w,t、][AVc,v,t]——[c]场景[t]时段弃风量、弃光量,MWh;[Sc,hp,t]——[c]场景弃水流量,104 m3;[αhp]——水电转化率,MWh/104 m3;[Xc,hp,T]——[c]场景调度期末水库库容,104 m3;[Xhp0]——初始库容,104 m3;[Lhp]——[hp]级水电站的下游电站集合;[αr]——水电转化率。
2.2 约束条件
2.2.1 水电机组出力约束
式中:[h]——水电机组编号;[Pc,h,t]——[c]场景[t]时段水电机组出力变量,MW;[ηh]——转换系数,一般取9.8[×]10-3;[Qc,h,t]——[c]场景[t]时段水电机组发电流量,104 m3;[hc,hp,t]——[c]场景[t]时段水库水头,m;[Ph,max]、[Ph,min]——水电机组出力上下限,MW;[Ih,t]——表征水电机组运行状态的二进制变量,运行状态取1,否则取0。
2.2.2 发电流量约束
式中:[Qh,max]、[Qh,min]——水电机组发电流量上下限,104 m3。
2.2.3 水量平衡约束
式中:[Xc,hp,t]——[c]场景[t]时段水电站库容,104 m3;[nqhp,t]——[t]时段水电站天然来水,104 m3;[Uhp]——[hp]级水电站上游电站集合;[τjh]——上游电站至下游电站水流滞时。
2.2.4 库容约束
式中:[Xhp,max]、[Xhp,min]——水库库容上下限,104 m3。
2.2.5 水电机组备用约束
式中:[i]——备用类型,即30 s实时响应备用、AGC备用、10 min旋转备用、30 min运行备用、60 min运行备用[19];[rc,h,i,t]——[c]场景[t]时段水电机组预留的各类型备用容量,MW。
2.2.6 功率平衡约束
式中:[PLt]——[t]时段系统负荷,MW;[Pc,w,t]、[Pc,v,t]——[c]场景[t]时段风电场、光伏电站计划出力,MW;[NH]——水电机组总数。
2.2.7 弃风弃光约束
式中:[Pkc,w,t]、[Pkc,v,t]——[c]场景[t]时段风电场、光伏电站可发出力,MW;[Pfw,t]、[Pfv,t]——[t]时段风电场、光伏电站预测出力,MW;[ΔPc,w,t]、[ΔPc,v,t]——[c]场景[t]时段风电场、光伏电站预测误差;[Pw,max]、[Pv,max]——风电场、光伏电站最大出力,MW。
2.2.8 备用需求约束
式中:[Ec,i,t]——离散傅里叶变换方法量化得到的[c]场景[t]时段各类型备用的需求量,MW[20]。
2.2.9 动态频率响应约束
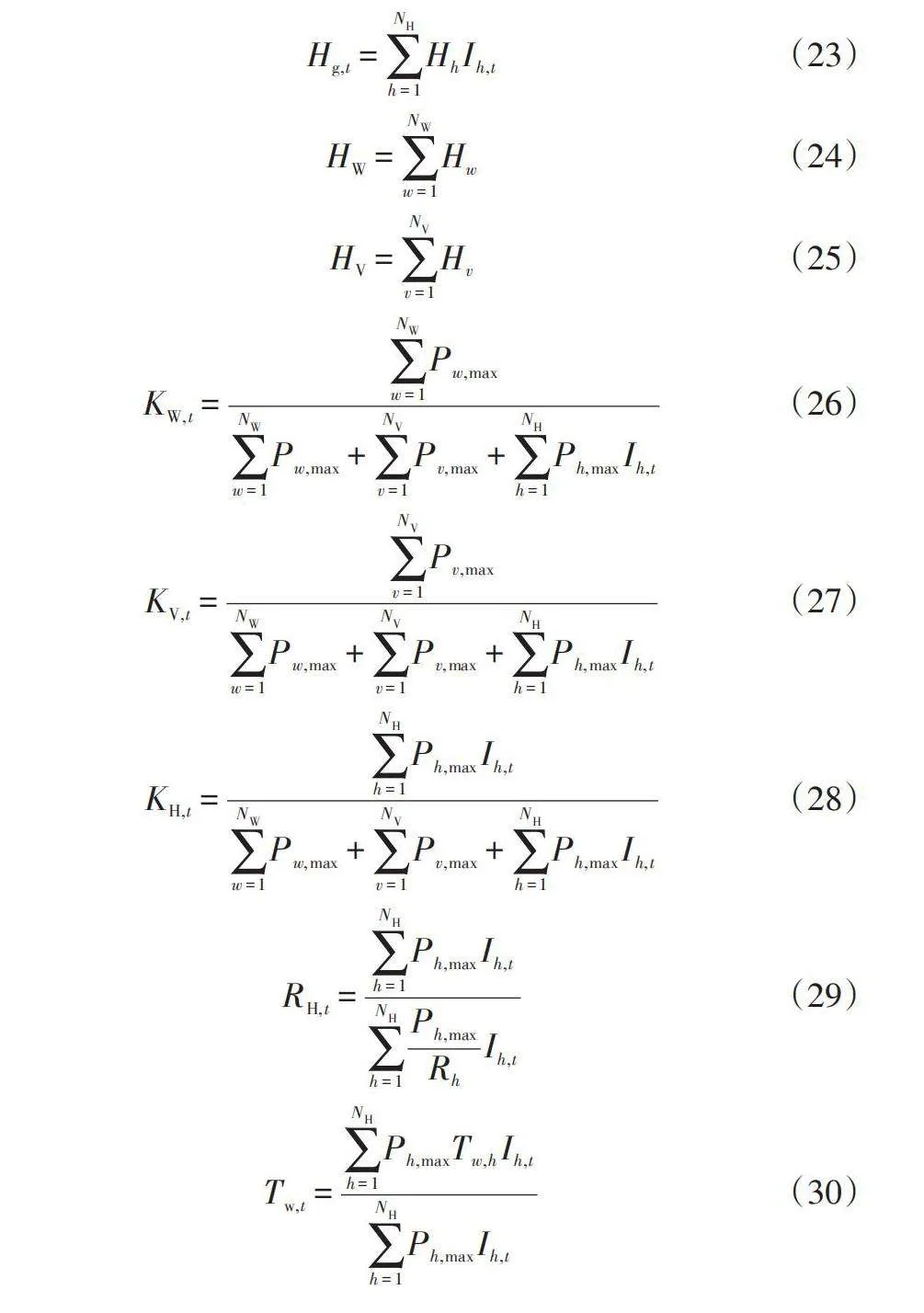
系统频率响应等值模型推导的约束(式(7))含有大量参数,为减少计算规模,可对参数进行聚合。
式中:[Hg,t]——[t]时段系统等值惯性时间常数,s;[Hh]——水电机组惯性时间常数,s;[HW]、[HV]——风电场、光伏电站等值虚拟惯性时间常数,s;[KW,t]、[KV,t]、[KH,t]——[t]时段风电机组、光伏机组、水电机组机械功率增益;[RH,t]——水电机组等值调差系数;[Rh]——水电机组[h]调差系数;[Tw,t]——水轮机等值水流时间常数,s;[Tw,h]——水电机组[h]水流时间常数,s;[RW]、[RV]——风电场、光伏电站等值下垂系数;[ΔPt]——[t]时段系统功率缺额,MW。
2.3 模型求解方法
上述模型为复杂非线性优化模型,式(9)、式(26)~式(30)、式(34)、式(35)增大了模型求解难度。式(26)可转化为:
式(36)右边是线性的,左边是连续变量[KW,t]与二进制变量[Ih,t]相乘。引入辅助变量[KIW,h,t]表示这2个变量的乘积,从而式(36)可表示为:
[h=1NHPh,max×KIW,h,t=w=1NWPw,max-KW,tw=1NWPw,max+v=1NVPv,max0≤KIW,h,t≤KW,t,maxIh,tKIW,h,t≤KW,t≤KW,t,maxKW,t-KIW,h,t≤KW,t,max1-Ih,t] (37)
式中:[KW,t,max]——风电机组机械功率增益上限。
式(27)~式(30)及式(34)的线性化与式(26)的转化方法相同,为节约篇幅,本文从略。式(9)、式(35)的线性化分别采用文献[20]和文献[5]中的方法。至此,上述复杂的混合整数非线性模型转化为混合整数线性规划模型,从而可采用商业优化软件CPLEX求解。
3 算例分析
3.1 算例1
为验证模型的有效性,首先对由4台水电机组组成的梯级水电站、1座装机容量为100 MW的风电场及1座装机容量为50 MW的光伏电站进行分析计算。水电站自上而下编号,机组参数见表1[21-22]。水电转化率取0.2 MWh/(104m3),水流滞时为1 h。风、光出力预测曲线、系统负荷需求曲线如图4所示。
风电场参数[HW=2] s,[RW=0.05;]光伏电站参数[HV=1] s,[RV=0.025]。频率约束中,[D=1.5],[fb=]50 Hz,[flim·=]0.5[Hzs],[Δfss,lim=]0.2 Hz,[Δflim=]49.6 Hz。假设机组H2在20:00时发生故障,且故障后该机组不再参与调度,20:00—24:00时段由此产生的功率缺额为:[ΔP=0.125,0.131,0.125,0.131,0.128 pu。]为研究动态频率响应对系统优化调度的影响,对以下2种方案进行对比分析:方案1:不考虑动态频率响应约束的优化调度模型;方案2:考虑动态频率响应约束的优化调度模型。
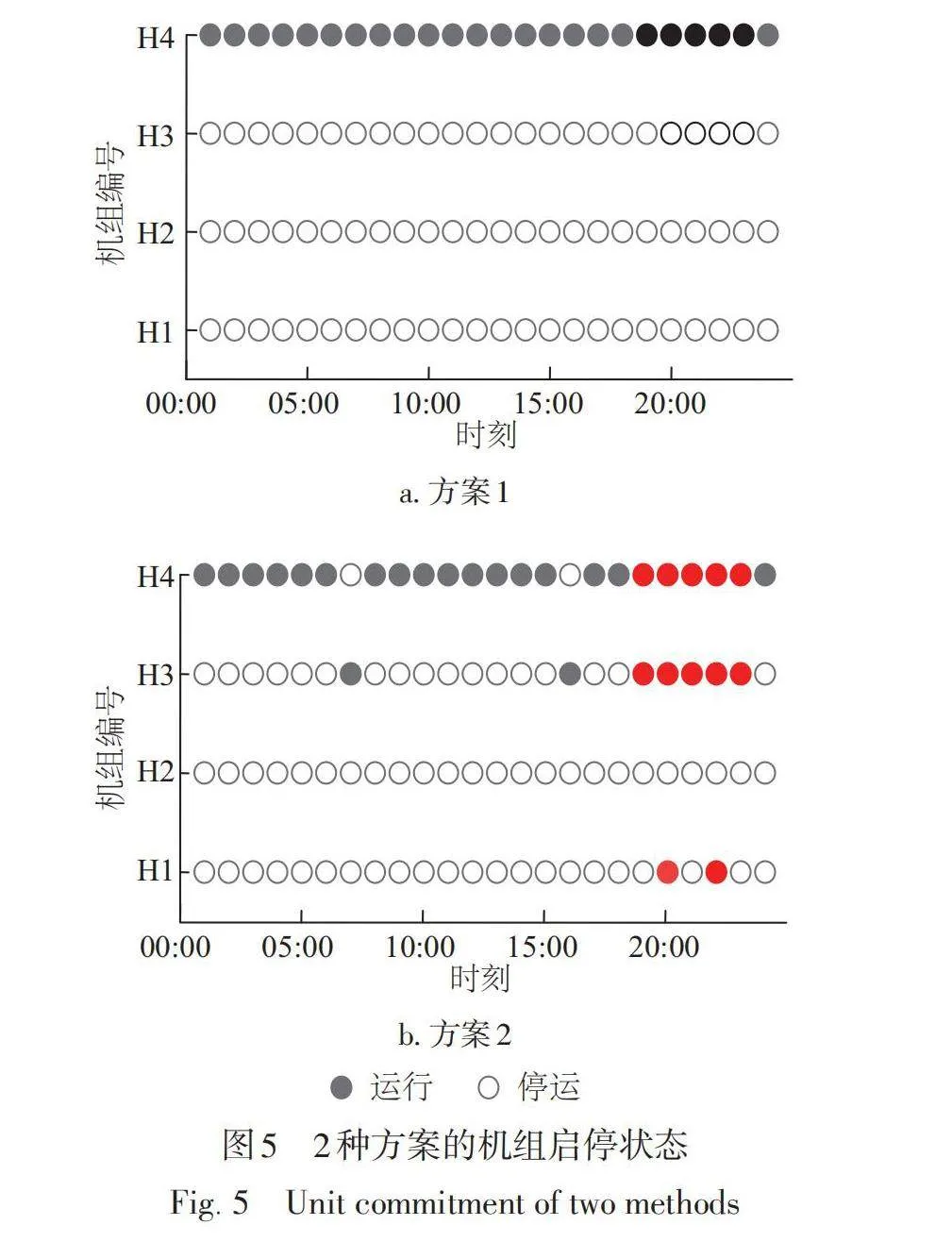
图5为2种方案的机组启停状态。为使结果对比明显,图5b中红色“ ”表示机组处于运行状态。由图5可见,方案2中,为响应系统功率缺额引起的频率变化,会增开新的水电机组以提高系统抵御频率稳定风险的能力。
3.1.1 2种方案的系统频率变化率
系统初始频率变化率主要受系统惯量的影响,图6为2种方案下系统频率变化率对比。由图6可知,考虑动态频率响应约束时,各时段均不超过最大允许频率变化率0.5 Hz/s。而方案1中,21:00、23:00、24:00的频率变化率均超过最大限值。以24:00为例,方案1只有机组H4开机,系统总惯量为6.3643 s,无法满足最小惯量需求6.4 s。而考虑频率约束时,增开机组H3,总惯量达15.5786 s,可有效防止频率快速跌落,提高系统惯性响应能力。
3.1.2 2种方案的最低点频率偏差
系统低频减载触发频率为49.6 Hz,因此最低点最大允许频率偏差为0.4 Hz。表2为2种方案下最低点频率偏差对比。2种方案的最低点频率偏差均小于0.4 Hz。但方案2的频率偏差量更小,表明考虑频率响应约束能有效提高系统调频能力。
3.1.3 2种方案的准稳态频率偏差
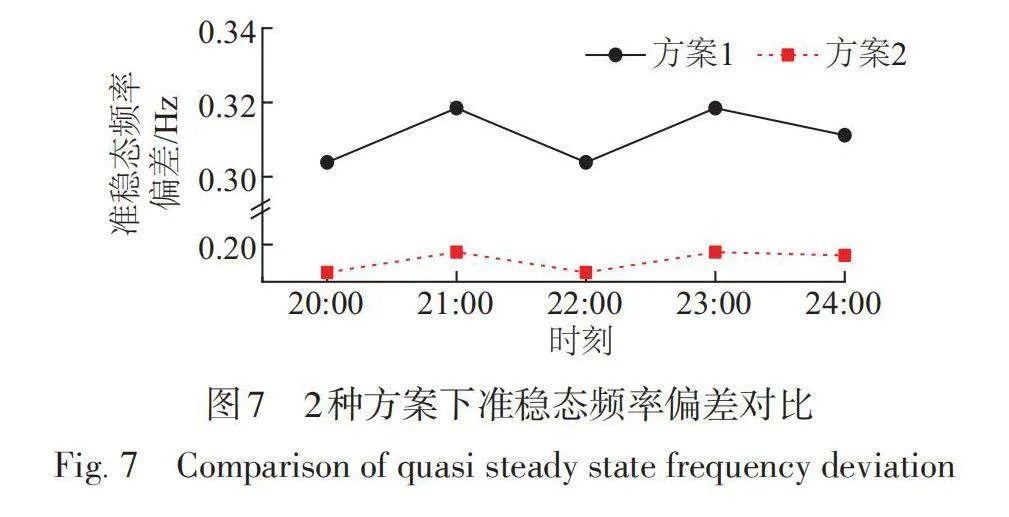
图7为2种方案下准稳态频率偏差对比。由图7可知,方案2的系统准稳态频率偏差均控制在允许偏差范围内,而方案1准稳态频率偏差均超过最大允许偏差值0.2 Hz,反映了考虑频率响应约束对保证系统安全稳定运行的重要性。
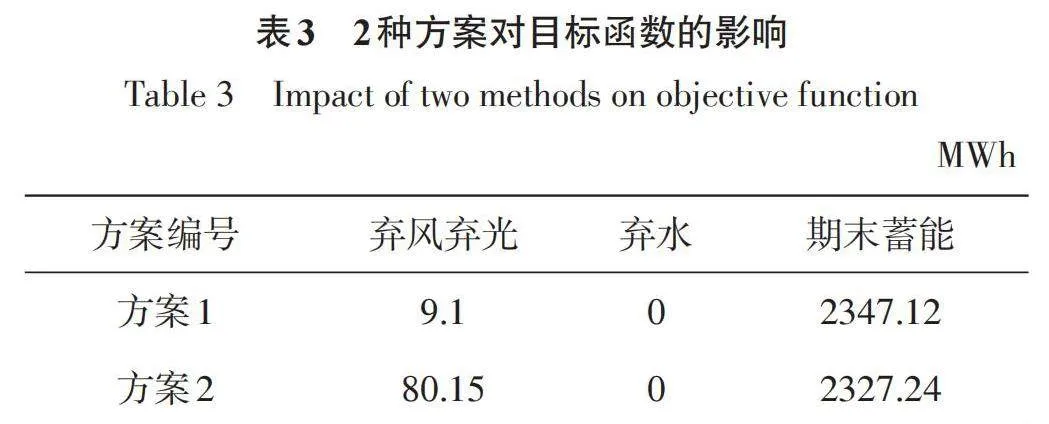
3.1.4 不同方案对目标函数的影响
表3分析了2种方案对目标函数的影响。当系统产生功率缺额时,方案2中在线运行机组数量增加,水电总出力增加,为保持功率平衡,风光出力减少,因此方案2弃风弃光量增加,水库调度期末蓄能减少。
为使水库期末蓄能尽量大,新增机组仅以最小发电流量安排出力。弃风量集中于21:00和23:00,其原因是:在机组H1和H3按最小发电流量安排出力的前提下,系统只能通过降低机组H4的功率输出来尽可能接纳风光。当H4减至最小出力时,仍无法满足功率平衡,只能弃风。计及动态频率响应约束时,风光消纳水平降低,水库调度期末蓄能减少,但增强了频率稳定性,保障了系统的安全稳定运行。
为研究丰水时风、光、水协调优化规律,仿真分析丰水期调度情况。结果表明,丰水期为避免弃水,在线运行机组数量增多。当系统产生功率缺额,在线运行机组的惯量能维持系统频率稳定,从而丰水期是否考虑动态频率响应约束对调度方案并无影响。
3.2 算例2
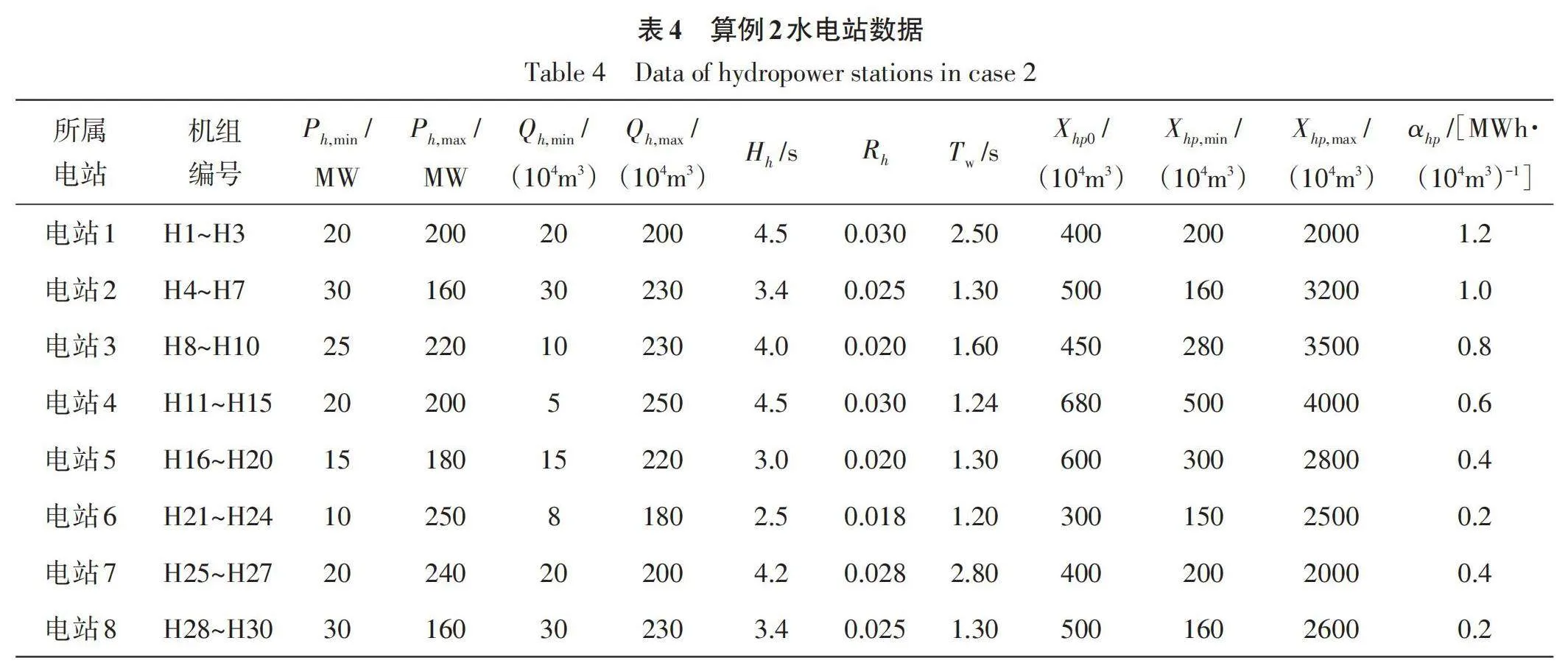
为进一步验证模型的适用性,选取中国西南地区某大型梯级水电系统进行仿真。该系统包括30台水电机组组成的8级水电站,拓扑结构如图8所示。风电场和光伏电站装机容量为算例1的3倍。假设系统在[t=14] h发生故障,功率缺额均为[ΔP=0.15 pu]。水电站参数见表4,负荷需求及风光预测出力如图9所示。
图10为2种方案下机组启停状态。2种方案下频率指标对比如图11所示。仿真结果表明,考虑动态频率响应约束的模型优势更明显,通过增加开机机组数量提高系统惯性响应和调频能力,能有效减小频率偏移,保证系统频率稳定。
实际运行时,调度员需快速决策,设定求解时间为10 min。表4为不同方案的求解精度。求解间隙为:
2种方案的求解间隙分别为0.59%和1.2%,模型含有大量约束和变量,结果可接受。因为求解时间的增加,只会收紧目标下界而不会改变目标最优解[23]。与方案1相比,方案2的约束数量增加29.8%,但求解间隙只增加0.61%,表明所提模型在大规模风光水互补发电系统中仍具有较好的优化结果。
4 结 论
本文考虑风光并网的低惯量特征,建立考虑动态频率响应的短期优化调度模型,主要结论如下:
1)对功率缺失时系统频率动态变化过程建模,推导出频率变化率、最低点频率及准稳态频率偏差约束,并加入到优化调度模型中。调度决策结果表明,合理的机组启停计划能有效减小系统出现突发事件后的频率变化率,增强系统频率响应能力。
2)将复杂的非线性模型转化为混合整数线性化模型,在降低求解难度的同时,也能保证求解精度。
3)相较于传统的火电机组,水电机组调节性能更好,且目标函数中考虑了调度期末水库蓄水的未来价值,这对提高清洁能源利用率具有重要意义。
[参考文献]
[1] PAPAEFTHYMIOU G, DRAGOON K. Towards 100% renewable energy systems: uncapping power system flexibility[J]. Energy policy, 2016, 92: 69-82.
[2] 鲁宗相, 汤海雁, 乔颖, 等. 电力电子接口对电力系统频率控制的影响综述[J]. 中国电力, 2018, 51(1): 51-58.
LU Z X, TANG H Y, QIAO Y, et al. The impact of power electronics interfaces on power system frequency control: a review[J]. Electric power, 2018, 51(1): 51-58.
[3] AHMADI" "H," GHASEMI" "H." Security-constrained" "unit commitment with linearized system frequency limit constraints[J]. IEEE transactions on power systems, 2014, 29(4): 1536-1545.
[4] TENG F, TROVATO V, STRBAC G. Stochastic scheduling with inertia-dependent fast frequency response requirements[J]." IEEE" transactions" on" power" systems, 2016, 31(2): 1557-1566.
[5] MUZHIKYAN A, MEZHER T, FARID A M. Power system enterprise control with inertial response procurement[J]." IEEE" transactions" on" power" systems, 2018, 33(4): 3735-3744.
[6] PATURE M,MARKOVIC U, DELIKARAOGLOU S, et al." Stochastic" unit" commitment" in" low-inertia grids[J]. IEEE transactions on power systems, 2020, 35(5): 3448-3458.
[7] 徐野驰, 颜云松, 张俊芳, 等. 考虑预测误差与频率响应的随机优化调度[J]. 电网技术, 2020, 44(10): 3663-3670.
XU Y C, YAN Y S, ZHANG J F, et al. Stochastic optimal dispatching considering prediction error and frequency response[J]. Power system technology, 2020, 44(10): 3663-3670.
[8] AKBARI M, MADANI S M. Analytical evaluation of control strategies for participation of doubly fed induction generator-based" wind" farms" in" power" system" short-term frequency regulation[J]. IET renewable power generation, 2014, 8(3): 324-333.
[9] 文云峰, 杨伟峰, 林晓煌. 低惯量电力系统频率稳定分析与控制研究综述及展望[J]. 电力自动化设备, 2020, 40(9): 211-222.
WEN Y F, YANG W F, LIN X H. Review and prospect of frequency" stability" analysis" and" control" of" low-inertia power" systems[J]." Electric" power" automatic" equipment, 2020, 40(9): 211-222.
[10] 张武其, 文云峰, 迟方德, 等. 电力系统惯量评估研究框架与展望[J]. 中国电机工程学报, 2021, 41(20): 6842-6855.
ZHANG W Q, WEN Y F, CHI F D, et al. Research framework and prospect on power system inertia estimation[J]. Proceedings of the CSEE, 2021, 41(20): 6842-6855.
[11] YAN R, SAHA T K. Frequency response estimation method for high wind penetration considering wind turbine frequency" support" functions[J]." IET" renewable" power generation, 2015, 9(7): 775-782.
[12] WOGRIN S, TEJADA-ARANGO D, DELIKARAOGLOU S, et al. Assessing the impact of inertia and reactive power constraints in" generation" expansion" planning[J]. Applied energy, 2020, 280: 1-13.
[13] 葛晓琳, 刘亚, 符杨, 等. 考虑惯量支撑及频率调节全过程的分布鲁棒机组组合[J]. 中国电机工程学报,2021, 41(12): 4043-4057.
GE X L,LIU Y,FU Y,et al. Distributed robust unit commitment considering the whole process of inertia support and frequency regulations[J]. Proceedings of the CSEE, 2021, 41(12): 4043-4057.
[14] ZHANG Z Y, DU E S, TENG F, et al. Modeling frequency dynamics in unit commitment with a high share of" renewable" "energy[J]." IEEE" "transactions" "on" "power systems, 2020, 35(6): 4383-4395.
[15] 荣俊杰, 周明, 李庚银. 考虑动态频率安全的风电参与负荷恢复优化调度[J]. 电网技术, 2022, 46(4): 1335-1345.
RONG J J, ZHOU M, LI G Y. Optimal dispatch of wind power participating in load restoration considering dynamic frequency security[J]. Power system technology, 2022, 46(4): 1335-1345.
[16] 张祥宇, 杨黎, 朱晓荣, 等. 光储发电系统的虚拟转动惯量控制[J]. 电力自动化设备, 2017, 37(9): 109-115.
ZHANG X Y, YANG L, ZHU X R, et al. Virtual rotational inertia control of PV generation system with energy" "storage" "devices[J]." Electric" "power" "automation equipment, 2017, 37(9): 109-115.
[17] 杨慧彪, 贾祺, 项丽, 等. 双级式光伏发电虚拟惯量控制策略[J]. 电力系统自动化, 2019, 43(10): 87-94.
YANG H B, JIA Q, XIANG L, et al. Virtual inertia control strategies for double-stage photovoltaic power generation[J]. Automation of electric power systems, 2019, 43(10): 87-94.
[18] 李世春, 曹润杰, 雷小林, 等. 基于改进SFR模型的含风电虚拟惯性/一次调频电力系统频率响应特性[J]. 可再生能源, 2019, 37(5): 694-700.
LI S C, CAO R J, LEI X L, et al. Frequency characteristics of power system involving virtual inertia and primary frequency regulation of wind power based on modified SFR model[J]. Renewable energy resources, 2019, 37(5): 694-700.
[19] GE X" L," JIN" Y," FU" Y," et" al." Multiple-cut" "benders decomposition for wind-hydro-thermal optimal scheduling with" "quantifying" "various" "types" "of" "reserves[J]." IEEE transactions on sustainable energy, 2020, 11(3): 1358-1369.
[20] WU L, SHAHIDEPOUR M, LI Z. GENCO’s risk-constrained hydrothermal scheduling[J]. IEEE transactions on power systems, 2008, 23(4): 1847-1858.
[21] 魏守平. 水轮机调节系统仿真[M]. 武汉: 华中科技大学出版社, 2011: 161-163.
WEI S P. Simulation of hydraulic turbine regulating system[M]. Wuhan: Huazhong University of Science and Technology Press, 2011: 161-163.
[22] 肖欣, 周渝慧, 何时有, 等. 含流域梯级水电的水火风互补发电系统联合运行优化[J]. 电力自动化设备, 2018, 38(2): 100-108.
XIAO X, ZHOU Y H, HE S Y, et al. Optimal joint operation of hydro-thermal-wind hybrid power system with cascaded" "hydro" "power[J]." "Electric" "power" "automation equipment, 2018, 38(2): 100-108.
[23] LI X, LI T J, WEI J H, et al. Hydro unit commitment via mixed integer linear programming: a case study of the three gorges" project" China[J]." IEEE" transactions" on" power systems, 2014, 29(3): 1232-1241.
SHORT-TERM OPTIMAL SCHEDULING MODEL FOR
WIND-SOLAR-HYDRO HYBRID POWER GENERATION SYSTEM CONSIDERING DYNAMIC FREQUENCY RESPONSE
Zhang Qiuyan,Xie Jun,Pan Xueping,Liu Mingtao,Xiao Yuze,Feng Li’na
(College of Energy and Electrical Engineering, Hohai University, Nanjing 211100, China)
Abstract:In view of the problem that wind-solar grid integration will reduce the system inertia and weaken the system frequency regulation capability, considering the synchronous inertia of hydropower generators, the virtual inertia and droop control of wind farms and PV stations comprehensively, the dynamic frequency response model of multi-machine system with wind, solar and hydropower is proposed. The rate of change of frequency constraint, nadir frequency deviation constraint, as well as quasi-steady-state frequency deviation constraint, is deduced. Based on above, in order to maximize the utilization of clean energy, the goal is to minimize the amount of abandoned wind, solar and hydro power and maximize the stored energy of hydro stations at the end of the scheduling period. considering the multiple operational constraints of cascade hydropower, wind power, photovoltaics and the system, the short-term optimal scheduling model for the wind-solar-hydro coordinated generation system is constructed, and the mixed integer linear programming method is used to solve it. Finally, the simulation examples verify the validity and applicability of the proposed model.
Keywords:virtual inertia; droop control; frequency response; wind-solar-hydro coordinated generation; mixed integer linear programming
猜你喜欢
电气技术(2023年7期)2023-08-08 05:26:36
太阳能学报(2023年2期)2023-04-12 00:00:00
中国科技纵横(2018年10期)2018-07-27 08:45:38
消费导刊(2018年8期)2018-05-25 13:19:34
发电技术(2018年1期)2018-03-28 07:48:10
制造技术与机床(2017年8期)2017-11-27 02:10:17
演艺科技(2017年3期)2017-05-03 15:56:16
光学精密工程(2016年5期)2016-11-07 09:06:16
现代电子技术(2015年14期)2015-07-22 08:24:02
电子技术与软件工程(2015年6期)2015-04-20 17:07:52