
浙江近海船舶碰撞风险分析方法
2023-04-12 06:50:32王书献张胜茂范秀梅胡慧娟杨胜龙
渔业信息与战略 2023年1期
王书献,戴 乾,张胜茂*,范秀梅,胡慧娟,杨胜龙
(1. 农业农村部渔业遥感重点试验室,中国水产科学研究院东海水产研究所,上海 200090; 2. 大连海洋大学航海与船舶工程学院,辽宁大连 116023; 3. 浙江省海洋水产研究所,浙江省海洋渔业资源可持续利用技术研究重点实验室,浙江舟山 316021; 4. 上海海洋大学海洋科学学院,上海 201306)
在国际物流运输方式中,水上交通因其低成本、高运量的特征被广泛使用[1]。随着水上交通的发展,各类水上交通事故的数量也不断增加,包括碰撞、搁浅等。船舶碰撞是引发海上安全事故的最主要原因之一[2],研究船舶碰撞风险区域对海上交通安全具有较大的理论和实际意义。精准的船舶碰撞风险区域预警能够保障船舶航行安全。为降低船舶碰撞事故发生频率,减轻碰撞事故后果,国内外相关领域学者针对船舶碰撞风险、船舶避碰系统展开了详尽的分析和研究。按照其研究内容可以划分为船舶碰撞原因分析、船舶碰撞风险分析与预报两类。
船舶碰撞原因分析是从船舶结构、海上环境、船舶船员等各方面对造成船舶碰撞事故的原因进行分析,有效的船舶碰撞原因分析能够从根源上降低船舶碰撞事故发生概率。郝勇等[3]对2007年武汉海事局辖区船舶碰撞材料构建事故树,进行定性与定量分析,得出14个主要的危险因素,其分析结果显示,应急操作不当、违反分道通航以及疲劳驾驶等人为因素是引发船舶碰撞的主要原因。RIVAI等[4]对日本周围海域1998—2008年船舶事故进行分析,认为人为因素是船舶碰撞的最主要原因之一。李晓松和孔宪卫[5]从人为因素、船舶因素和环境因素3方面出发,利用贝叶斯网络理论建立了船舶碰撞致因模型。尹相达等[6]使用复杂系统脆性理论深入研究商渔船碰撞事故的形成机理,认为人为不安全因素是事故发生的主要原因。因此,船舶碰撞事故的发生与船舶自身因素、环境因素及人为因素均有紧密的联系,但人为因素仍被认为是造成船舶碰撞事故发生的最主要因素。
碰撞风险分析与预报研究是基于船舶自动识别系统(Automatic Identification System,AIS)、遥感、雷达等多来源数据,利用数据挖掘、机器学习等数据分析技术,对船舶碰撞风险进行分析与预测。详细的分析报告与精准的碰撞预测能够帮助船员提高警惕,从而降低船舶碰撞事故发生概率。船舶领域(ship domain)和碰撞风险指数(collision risk index, CRI)是船舶碰撞风险分析与预报研究中的重要概念。船舶领域的概念最早由FUJII和TANAKA[7]提出,是船舶碰撞风险研究中的重要概念,其被定义为后船的驾驶员应避免进入前船周围的领域。在船舶领域的概念被提出后,DAVIS等[8]、贾传荧[9]等学者先后引入更多的影响因素,构建了更加完善和复杂的船舶领域模型[10-11]。该类完善的船舶领域模型用于衡量船舶之间碰撞事故发生的概率,是船舶碰撞风险研究中重要的参数。因此,基于碰撞风险指数的船舶碰撞模型是船舶交通安全领域研究热点。GANG等[12]提出一种支持向量机的船舶碰撞风险指数估计方法,得到了较好的试验结果。NAMGUNG等[13]在最近会遇距离(distance at the closest point of approach, DCPA)、最近会遇时间(time to the closest point of approach, TCPA)的基础上,加入了本船速度、目标船速度、本船航向、目标船航向、本船与目标船之间的相对位置等船舶参数,引入具有人工神经网络的推力模型,提出了更加丰富的扩展CRI模型。赵佳妮[14]尝试将灰色马尔可夫模型用于海上交通事故预测,提高了预测精度。魏祥渊等[15]基于江苏镇江渡船航行避碰智能预警系统,评价3种不同精度的雷达对预警准确性的影响,其研究结果显示,雷达精度对该系统预警准确性有显著影响。HUANG等[16]从运动预测、冲突检测、冲突解决等3个过程研究船舶避碰技术,重点研究了从人工驾驶船舶避碰到无人驾驶船舶避碰的过渡。
由于船舶碰撞事故的危害性极大,国内外避碰研究较为丰富。但是,在过去的船舶避碰研究中,除了致因分析[17-18]外,多注重基于某艘船附近的状态,建立危险度模型用于表征该状态下船舶发生碰撞的危险程度。例如,郑中义和吴兆麟[19]提出空间碰撞危险度与时间碰撞危险度的概念,完善了船舶碰撞危险度模型。章泽虎[20]使用模糊综合评价方法提出了新的船舶碰撞危险度模型。TSOU和HSUEH[21]使用人工智能领域的蚁群算法,构建了优化的避碰模型。倪生科等[22]基于混合遗传算法,针对不同会遇状态下的船舶避碰路径规划问题,建立了避碰路径规划模型。马杰等[23]针对受限水域避碰问题,提出将速度障碍思想与人工势场理论相结合的船舶避碰决策方法,该模型在仿真环境下能够满足船舶避碰过程中的操纵受限要求。该类研究可服务于船舶实时智能避碰系统,辅助避碰系统做实时决策。但这些传统船舶避碰研究多为从单艘船舶出发探究某船舶微观层面的碰撞风险模型,着眼于单艘船舶在其航行过程中根据周围环境实时判断船舶碰撞风险并作出避碰反应。从微观上对单艘船舶做碰撞风险分析和决策,理论上能够大大减轻船舶发生碰撞事故的概率,但是,微观上的船舶碰撞风险分析存在2点不足:第一,该方式需要船舶上配备有较高算力以完成实时运算,目前,中国渔船通常依赖船长经验,根据AIS或雷达数据做出避碰决策,复杂的实时碰撞风险模型难以得到充分应用,即当前的渔业船舶信息化普及程度难以支持其高强度运算;第二,该方式难以得到碰撞风险与海域之间的关系,不能为航线规划等宏观避碰工作做参考。针对以上2点不足,本文从宏观上分析了浙江近海各个区域的船舶碰撞风险,并进行风险等级划分,对航线规划、降低船舶碰撞行为发生概率具有重要意义。
1 数据与方法
1.1 数据来源与特征
本文基于AIS数据研究浙江近海的船舶碰撞风险等级,使用的船舶信息均来自浙江沿海岸基AIS和卫星AIS。信息主要包括船舶基本信息(静态数据)及船位信息(动态数据)。船舶动态数据与船舶静态数据格式分别如表1和表2所示。动态数据包括船舶唯一标识符、数据上传时间、位置、航速、航向、数据来源等信息。其中数据来源为1时,表示数据来自岸基;数据来源为17时,表示数据来自卫星。本文使用浙江近海AIS数据共170GB,包含的数据量较大。为了保证数据的可用性,首先对数据进行了初步清洗。数据清洗的原则为,剔除数据集中航速、航向、经度、纬度等关键信息缺失的记录。
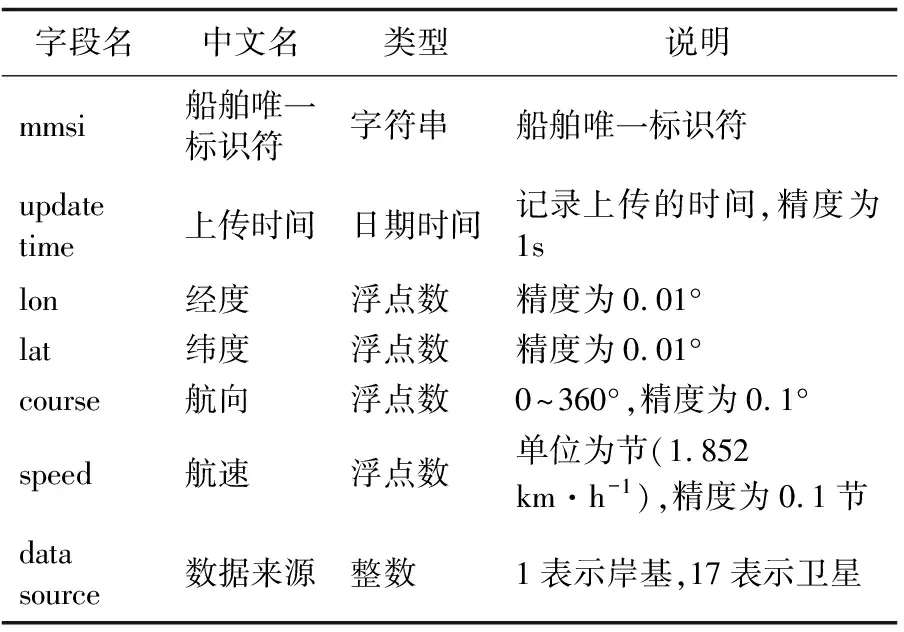
表1 AIS动态数据格式Tab.1 AIS dynamic data format
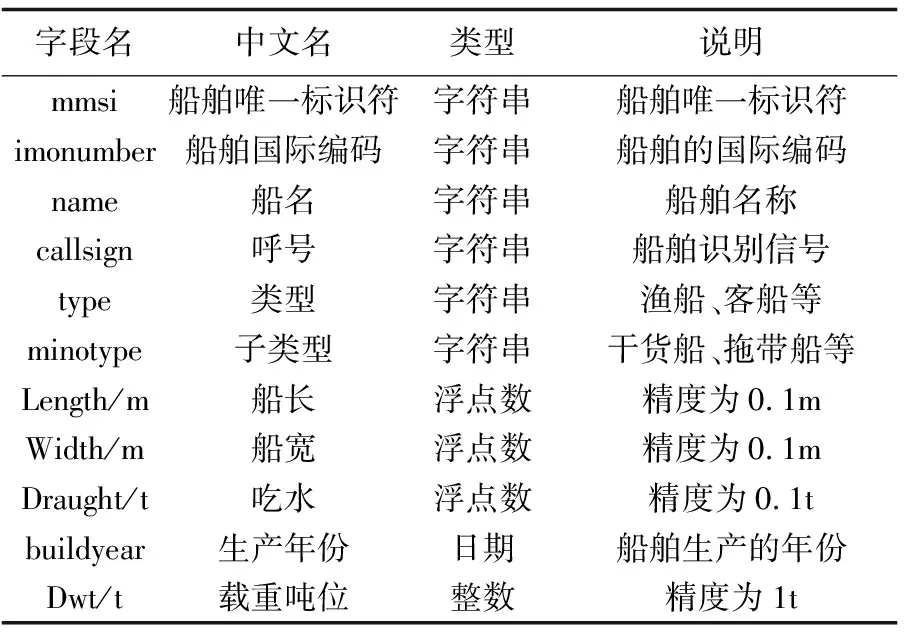
表2 AIS静态数据格式Tab.2 AIS static data format
1.2 风险等级划分
1.2.1 风险等级要素
海上船舶的避碰是一个复杂庞大的课题,某个海域内的碰撞风险不仅与船舶因素有关,还与气候气象、船员健康等外界因素有关,且各个因素之间可能会存在相互影响,形成相互关联、制约的复杂系统。因此,对船舶的碰撞风险评价具有模糊性,运用模糊综合评价方法是必要的可行方案之一。运用该方法首先需要确定可能对结果产生影响的因素。
某海域的碰撞风险高低与该海域内各个船舶的碰撞风险有关,因此,为确定某海域船舶碰撞风险的影响因素,可以参照单艘船舶碰撞风险的影响因素。在当前有关单艘船舶碰撞风险的相关研究中,主要使用最近会遇距离DCPA、最近会遇时间TCPA作为评价船舶碰撞风险的依据。其中DCPA主要与两船的位置和航向有关,TCPA主要与两船的位置和航速有关。因此,本文在评价单个格网内的碰撞风险时,将船舶分布密度、船舶平均航速及船舶平均航向变化率作为影响海域内船舶碰撞风险的3个因素。
其中,船舶分布密度计算方法如公式(1)所示。
(1)
式(1)中,ρ表示船舶分布密度,N表示单位时间段某个格网内AIS接收到的数据量,S表示该格网的面积,其计算方法如公式(2)。
S=R2(λ2-λ1)·(sinφ2-sinφ1)
(2)
式(2)中,S表示格网面积,R表示地球半径(km),λ1、λ2表示经度(弧度),φ1、φ2表示纬度(弧度)。
船舶平均航速计算方法如公式(3)所示。
(3)
船舶平均航向变化率计算方法如公式(4)所示。
(4)
为综合评价船舶分布密度、船舶平均航速与船舶平均航向变化率3个因素的影响,本技术采用判断矩阵分析法对上述3个要素做权重分析。判断矩阵分析法是模糊综合评价中的一种常见方法,常常用于层次分析法中要素权重的确定[24]。判断矩阵分析法将n个因素排列成一个n阶判断矩阵,通过在因素之间的两两比较,根据各个因素的重要程度确定矩阵中元素值的大小。并计算出判断矩阵的最大特征根及其对应的特征向量,该特征向量即为各个因素的权重系数。在对各个要素之间做两两比较时,参照的标准如表3所示。
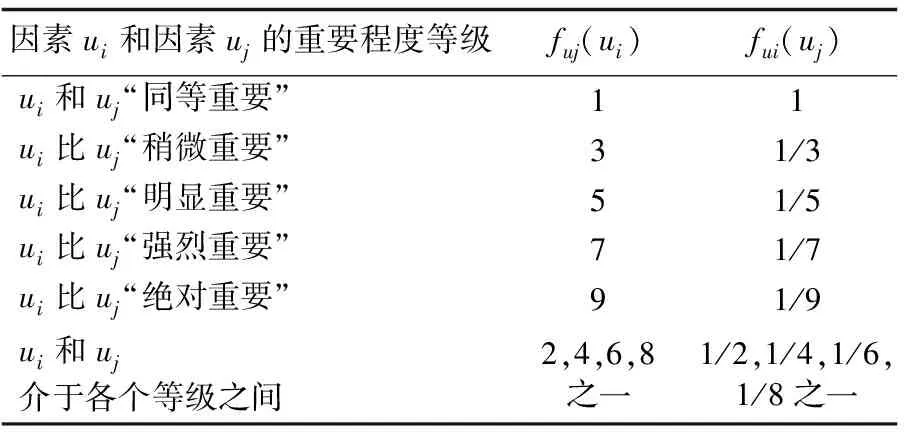
表3 因素重要程度判断值表Tab.3 Factor importance judgment value
1.2.2 风险等级划分
在碰撞危险度相关研究中,传统研究一般为碰撞危险度设定一个安全阈值。例如,碰撞危险度模糊取值在0~1之间,安全阈值设为0.5,碰撞危险度大于0.5则为危险情况,碰撞危险度小于0.5则为安全情况。将每个格网的安全等级划分为“安全”和“不安全”2个等级太过简化,不能明确比较不同格网之间的碰撞风险差异。因此,本文将风险等级设定为Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ共5个等级,Ⅰ级表示风险等级最低,Ⅴ级表示风险等级最高。等级划分方式选用等距离划分法:首先计算出船舶碰撞风险评价要素的标准分数;为了使分类数值均为正数,对要素集合按照公式(5)再做一次线性变换。
x**=x+|min(X)|
(5)
式(5)中,X表示所有碰撞风险评价要素集合,x是X集合中的值,x**表示x经过线性变换后的值;最后,将新集合按照数值大小5等分,对应不同的碰撞风险等级,如表4所示。

表4 风险等级划分Tab.4 Classification of risk levels
2 结果
2.1 船舶时空分布结果
对所有船舶进行分类后,对2020年各月浙江近海渔船、商船的空间分布与速度分布按照时间段进行统计,得到的结果如图1所示。
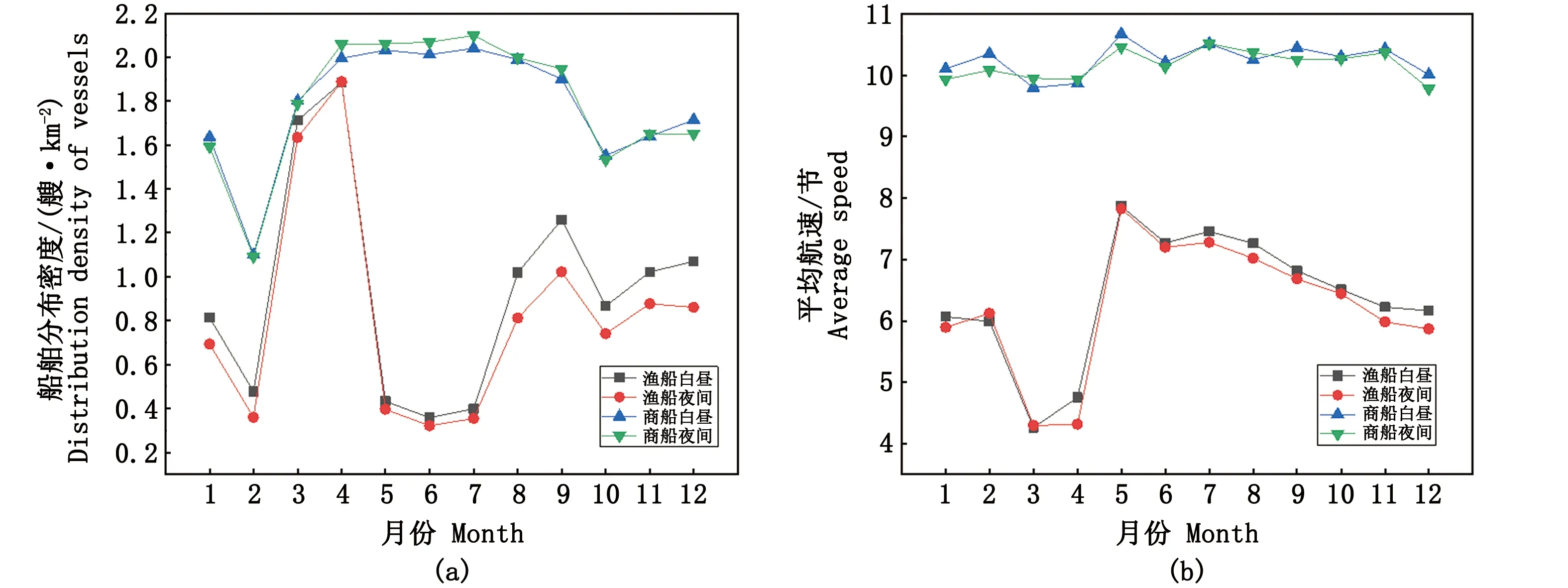
图1 2020年浙江近海船舶时空信息统计图Fig.1 Statistics of time and space information of Zhejiang offshore vessels in 2020
在图1(a)中,4条曲线分别表示渔船白昼、渔船夜间、商船白昼、商船夜间的分布密度情况。该分布密度是每个格网内的船舶数量与格网面积的比值,单位是艘·km-2。一个月份的平均船舶分布密度能够体现船舶在该月份内的密集程度。在图1(b)中,4条曲线分别表示渔船白昼、渔船夜间、商船白昼、商船夜间的航速信息,某时间段内航速信息是该时间段内所有AIS航速信息的平均值,表示该时间段内船舶的整体行进速度。图1(a)显示,2020年浙江近海商船在各个月份的分布密度较渔船稳定,在2020年2月分布最稀疏,4—9月分布较为密集,且商船在白昼与夜间的分布没有明显差异;渔船在不同月份的分布差异较大,且具有明显的昼夜差异性(渔船白昼分布密度高于夜间分布密度)。渔船在2月、5—7月的分布相对稀疏,在4月份达到峰值,分布密度从8月开始逐步上升到稳定水平。图1(b)显示,商船在2020年全年的平均航速较渔船稳定,基本保持在10节左右,且白昼与夜间的速度差异不明显;渔船在不同月份的航速变化较大,且具有明显的昼夜差异性(渔船白昼航速整体高于夜间航速)。渔船速度在3—4月达到最低值,约为4节,5月航速值达到最高,约为8节。
2.2 风险要素评价结果
从表5可以看出,船舶分布密度的权重最高,平均航速次之,平均航向变化率权重最低。其结果与实验前的预调查分析基本一致(一般近岸海域航速较低,但近岸海域是船舶事故高发区域,且航速高仅在船舶密度大的情形下存在风险,因此航速的权重低于船舶分布密度),船舶分布密度是影响某区域内船舶碰撞风险等级的最主要因素。

表5 层次分析法分析结果Tab.5 Analytic hierarchy process analysis results
2.3 风险等级划分结果
综合考虑渔船、商船的区域碰撞风险,并按照等距离法划分2020年浙江附近海域各区域内的碰撞风险等级,得到的划分结果如图2所示。
图2结果显示,2020年浙江近海船舶碰撞高风险区域(碰撞风险等级在Ⅲ级以上)主要集中在航线附近。但是不同月份的具体情况略有差异,5—7月的碰撞高风险(Ⅴ级)区域极少,3—4月的碰撞高风险区域较多。为了得到更具有普遍性的结论,对2020年全年浙江近海做整体碰撞风险等级划分,如图3所示。
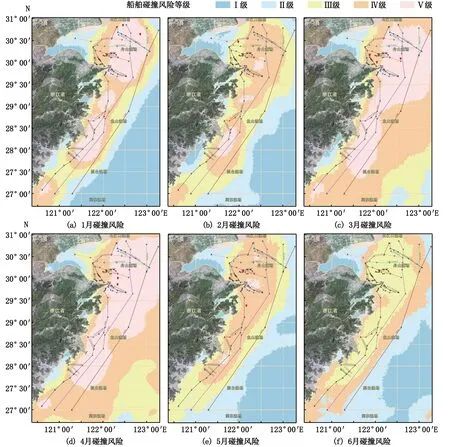
图2 2020年各月浙江附近海域船舶碰撞风险等级Fig.2 Risk levels of ship collisions in waters near Zhejiang in each month of 2020
图3显示,浙江近海船舶碰撞高风险区域主要集中在舟山渔场中部(尤其是29.5°N~30.4°N、121.5 E°~123°E之间的海域)、鱼山渔场西部与陆地交界处(尤其是28.5°N~29.4°N、121.6°E ~122.5°E之间的海域)等,温台渔场的整体风险碰撞等级相对较低。

图3 2020年浙江近海碰撞风险等级分布图Fig.3 Distribution map of Zhejiang offshore collision risk levels in 2020
为了进一步验证本文提出模型的可靠性,对中华人民共和国海事局网站中公布的浙江近海船舶事故报告进行统计。统计结果显示,2020年浙江近海发生的有明确位置信息的船舶碰撞事故共20起,其中15起发生在舟山渔场中部,5起发生在鱼山渔场西部。在2020年全年船舶碰撞风险区域评估结果中,该20起事故发生地点的碰撞风险等级均在Ⅲ级以上。本文得出的浙江近海区域碰撞风险等级在2020年得到验证。因此,该碰撞风险计算方案具有一定的可行性,能够为航行船舶提供高风险区域碰撞预警。
3 讨论
本文在宏观上对浙江近海的船舶碰撞风险等级做了划分,与相关学者的研究有一定的相似之处。冯馨予等[25]利用AIS数据引入船舶碰撞风险算子(vessel collision risk operator,VCRO),得到宏观层面的风险模型。其VCRO主要考虑到船舶之间的安全距离、船舶在相遇过程中距离的变化率及船舶航向的相对方向等,研究思路与本文类似。但冯馨予对6 n mile内每艘船舶建立关系风险矩阵,直观显示观测船舶与周围船舶发生碰撞风险的严重程度。而本文使用0.1°格网对目标区域进行格网划分,根据各个区域内的船舶动态信息划分碰撞风险等级。本文方案的优势在于能够直观地显示出目标海域内各个格网的碰撞风险等级,帮助船员提高防范警惕高风险区域,为船舶管理部门制定航线提供参考资料。
为进一步探究本文得出的区域碰撞风险等级在更长时间范围内的正确性,统计2011—2020年浙江省农业农村厅报告中公布的商渔船碰撞事故42起。统计结果显示:从空间分布看,商渔船碰撞事故高发区域主要集中在28.5°N ~31.5°N、121.5°E~124.0°E之间海域,涉及舟山渔场中部、鱼山渔场西部与陆地接壤处等。在该42起事故中,28起发生在航路附近(距离航路距离小于10 n mile),14起事故发生在其他区域,航路附近事故数是其他区域的2倍。将浙江近海按照禁渔区线分为禁渔区线内和禁渔区线外,则该42起商渔船碰撞事故可以分为30起禁渔区线内事故和12起禁渔区线外事故,这可能是由于禁渔线内有较多的小型捕捞渔船作业,而小型捕捞渔船是船舶事故高发船型。上述统计及分析表明,浙江近海船舶碰撞事故在空间上具有明显的分布规律,且分布规律主要受航道、禁渔区线等因素影响。航道、禁渔区线直接影响商船、渔船的分布密度,与本文判断矩阵分析法的权重矩阵趋势吻合。从分析结果看,该42起事故均发生在全年碰撞风险等级Ⅲ级以上区域,进一步说明了本文得出的全年区域碰撞风险等级图具有长期可用性。从时间分布看,各月份碰撞事故发生比例呈现双峰结构。10年间的统计结果显示,4月发生碰撞事故的频次最高,为7起,占全部事故的16.7%,其次为3月和9月,各发生6起碰撞事故,分别占全部事故的14.3%,6—7月较低,6—7月发生的碰撞事故一共仅占7.1%。总之,碰撞事故高发月份主要集中在休渔期前与期后数月。从本文的分月分析结果看,3月、4月和9月的高风险区域明显高于其他月份,5—7月的高风险区域较少,与10年间的碰撞事故时间特性相吻合。
本文提出的船舶碰撞风险等级划分方法具有很强的普适性,除可应用在浙江附近海域外,还可移植到其他任何目标海域,具有较大的应用前景。但是本文方法在风险等级确定中仍存在一定的优化空间。例如,在确定区域碰撞风险等级时,本文仅仅考虑了船舶分布密度、船舶航速、船舶平均航向变化率等要素。事实上,影响区域碰撞风险的因素除了上述船位因素外,还有气候、光照、时间等外界因素。例如,根据浙江省农业农村厅公布的商渔船碰撞事故报告[26],船舶碰撞事故发生在夜间(18:00—次日6:00)的频次要远高于发生在白昼(6:00—18:00)的频次,且发生在下半夜(0:00—6:00)的频次尤其高。本文为从宏观评价区域风险等级,忽略了时间等要素,但从历史碰撞事故看,昼夜信息对碰撞事故的发生具有显著影响,因此,在未来研究中可以添加昼夜因素,按照昼夜分别计算区域碰撞风险等级。另外,各个区域的光照、气候也有规律可循,在未来研究中应加入气候、光照等外界信息,进一步细化不同区域的碰撞风险等级。
4 结论
本文基于2020年浙江附近岸基AIS及星基AIS数据,使用模糊综合评价等多种方法,对浙江附近海域做碰撞风险等级划分。本文针对浙江近海,以1年的船舶数据做分析,试图找到碰撞行为时空分布的一般规律,以提高船员在中高风险区域的警惕,降低船舶碰撞行为的发生概率。研究结果表明:
(1)浙江近海船舶碰撞高风险区域主要集中在舟山渔场中部、鱼山渔场西部与陆地交界处等,温台渔场的整体风险碰撞等级相对较低。
(2)本文提出的船舶碰撞风险等级划分方法具有较强的可行性和可移植性。浙江近海2020年全年的船舶碰撞事故均发生在风险等级Ⅲ级以上区域。
猜你喜欢
作文小学高年级(2023年5期)2023-09-06 19:57:41
舰船科学技术(2022年22期)2022-12-13 03:37:24
水上消防(2022年1期)2022-06-16 08:06:56
廉政瞭望(2021年15期)2021-08-23 04:55:22
空间科学学报(2020年6期)2020-07-21 05:36:46
商周刊(2018年19期)2018-12-06 09:49:41
舰船科学技术(2018年7期)2018-07-25 06:30:18
小学科学(学生版)(2016年5期)2016-12-05 11:02:11
舰船科学技术(2016年1期)2016-02-27 15:39:23
江西理工大学学报(2015年3期)2015-12-22 05:26:18
