时间码现场校准技术研究
2023-04-06 09:18沈小青李世光李大珍王志虎余清华
宇航计测技术 2023年1期
沈小青,李世光,李大珍,王 超,王志虎,邱 斌,余清华,夏 伟
(1.中国卫星海上测控部,无锡214431;2.北京无线电计量测试研究所,北京100039)
1 引言
利用各种格式的时间码进行高精度的时间传递,可实现不同系统不同设备间的时间同步。随着时间码设备在武器系统、电力系统及航空航天等领域的广泛应用,时间码的同步精度也在不断提高,急需对其同步精度进行校准以评估其指标和性能[1];此外,时间码设备的使用环境对时间可用性及延续性要求极高,很多场景下时码设备需长期加电连续运行,无法拆卸搬运至试验室进行计量校准,因此对时间码的现场校准是一个很急迫且现实的需求。
目前,国内外时间码设备和时间码码型类别众多,校准方法大多采用拆卸后搬运至计量实验室校准的方法,存在测试周期长、校准场地固定等问题;部分场景下采用现场计量服务,但仍存在着难以获取精确的时间参考的问题。
在此给出一种对时间码进行现场高精度校准的方法,采用北斗共视技术和驯服技术,远程获取精确的内部时间基准,解决现场校准难以获取高精度参考源的难题。时码校准装置进一步对多种时间码信号解调恢复出1PPS,通过高精度时间数字转换器测量其与内时基的时差,完成对时间码的现场校准。
2 时间码现场校准原理
时间码现场校准装置通过北斗共视接收机驯服内部铷原子钟[2],获取高精度的内部时间基准;时间码解调模块对各钟时间码进行解调恢复出1PPS 信号和年月日时分秒时间信息;通过高精度时间间隔测量模块,得到解调1PPS 与内时基1PPS 的时差。系统原理如图1所示。
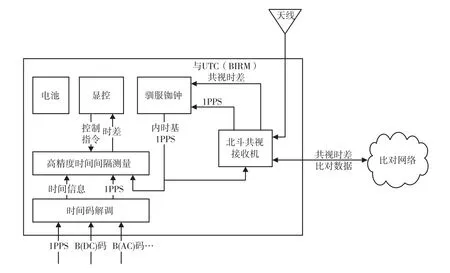
图1 时间码现场校准原理框图Fig.1 Block diagram of time code field calibration
2.1 时间码解调
时间码解调模块可以对1PPS、B(DC)码、B(AC)码、TOD、1PPS +TOD、PTP/NTP 等时间码信号进行解调,从而满足多种格式时间码的测量需求[3-7]。以下主要介绍B(DC)码和B(AC)码的解调。
2.1.1 B(DC)码解调
B(DC)码为脉宽调制的方波信号,帧周期为一秒,每个码元宽度为10 ms,每帧包括100 个码元[8]。码元的“准时”参考点是其脉冲前沿,帧的参考标志由一个位置识别标志和相邻的参考码元组成,其宽度为8 ms;每10 个码元有一个位置识别标志,它们均为8 ms 时宽;二进制“1”的脉冲宽度为5 ms,“0”的脉冲宽度为2 ms。每帧时间格式的帧起始是连续2 个8 ms 宽脉冲。时、分、秒均用BCD码表示,低位在前,高位在后;个位在前,十位在后。时序如图2所示。
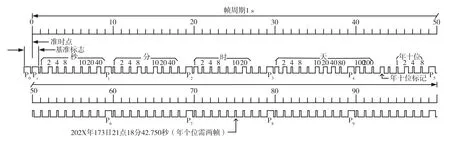
图2 B(DC)码时序图Fig.2 Timing Diagram of B(DC)code
FPGA 通过判断输入B(DC)码信号的脉宽,将B(DC)码信号分解为帧标志位“P 码”、数据“0”和数据“1”。当判断帧标志位为帧头时,将各数据位存入相应的存储器获得秒信息、分钟信息、小时信息、天信息和年信息等,并根据帧头位置获取1PPS。B(DC)码的年信息的个位在奇数秒帧信息中,而十位在偶数秒帧信息中,因此需要一奇一偶两帧才能获取完整的年信息。
2.1.2 B(AC)码解调
为改善B(DC)码传输距离短,将B(DC)码进行调制,从而形成B(AC)码。因此B(AC)码是在B(DC)码的基础上采用了1 kHz 的正弦信号进行调制,B(AC)码波形图如图3所示。码元周期为10 ms,载波周期为1 ms,载波频率为码元的10 倍,因此一个码元对应10 个正弦波周期。在正弦波上采用幅度调制,标准的调制比为10 ∶3,常用的调制比还有2 ∶1,3 ∶1,4 ∶1,5 ∶1,6 ∶1 等。B(AC)码的正弦信号过零点与直流B 码的起始码元的脉冲信号的上升沿保持一致,过零点代表B(AC)码的码元起始点。高幅调制在前,低幅调制在后。8 个周期的高幅调制代表P 码,5 个周期的高幅调制代表逻辑“1”,2 个周期的高幅调制代表逻辑“0”。第一个周期的过零点代表该码元的起始点。
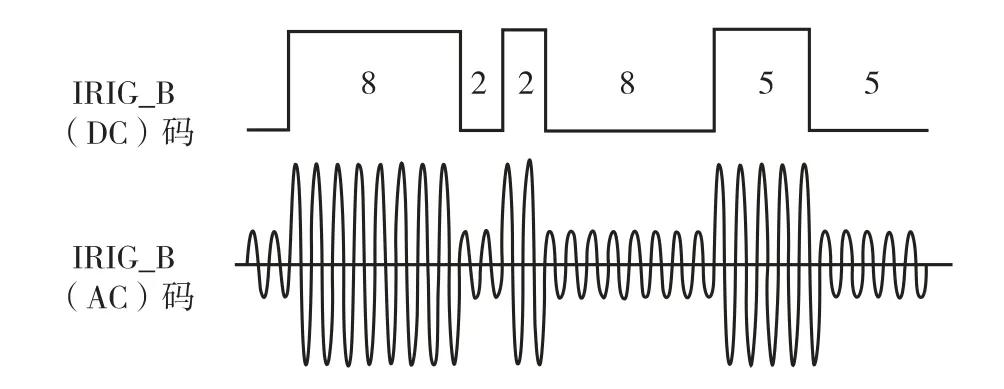
图3 B(AC)码格式示意图Fig.3 Schematic diagram of format of B(AC)code
时间码测量校准装置采用模数转换器件,将B(AC)码的正弦信号转换为FPGA 可识别的数字信号,再由FPGA 解析出码元中包含的时间信息,解调过程与B(DC)码一致。
2.2 测量不确定度来源
由图1 可知,时间码现场校准的不确定度主要取决于内部时基的最大允许误差、时差测量的最大允许误差和时间码解调的最大允许误差。其中时差测量通过专用的时间数字转换器,其时差测量的最大允许误差为±1 ns;而时码解调的最大允许误差主要取决于时间码格式;内部时基锁定于北斗共视接收机输出的1PPS,因此内时基的最大允许误差取决于接收机1PPS 的定时偏差。
3 基于北斗共视+驯服的参考时基获取
3.1 北斗共视法获取与UTC(BIRM)时差
时间码现场校准的参考时基通过北斗定时接收机获取。对于常规定时接收机,由于受到星历误差、星钟误差和电离层/对流层传播误差等的波动,在一天内定时接收机输出的1PPS 波动约为±50 ns。
通过北斗共视获取与UTC(BIRM)时差原理如图4所示。本地共视接收机测量铷钟输出1PPS 与北斗星载原子钟的时差,远端共视接收机测量UTC(BIRM)与同一颗北斗星载原子钟的时差,通过共视时差比对网络,即可得到铷钟输出1PPS 与UTC(BIRM)的时差。利用北斗共视技术,可以有效消除星历误差、星钟误差,并能消除大部分电离层/对流层传播误差,也可大大降低内部时间基准的不确定度。

图4 北斗共视法获取与UTC(BIRM)时差原理框图Fig.4 Block diagram of time difference measurement relative to UTC(BIRM)based on Beidou common view method
3.2 基于共视时差补偿的铷钟驯服
时间码现场校准以铷原子钟输出信号作为参考时间信号。自由运行的铷原子钟由于自身的准确度和漂移,只能作为二级频标,且其输出的1PPS具有随机相位,因此必须对铷钟进行驯服[9-12]。
常规驯服以定时接收机的1PPS 为参考,由于受导航卫星星钟星历误差和大气传播误差影响,导航接收机的1PPS日波动较大,驯服锁定后的铷钟准确度和1PPS 相位也跟随接收机波动。其次,接收机还存在固有的接收机时延问题,未校准时会引入较大的定时偏差。
铷钟驯服原理框图如图5所示。基于北斗共视比对获取的本地1PPS 与UTC(BIRM)时差,可对接收机1PPS 的相位误差进行补偿,从而有效消除卫星误差和大气传播误差的影响。利用卡尔曼滤波技术对时差补偿后的数据进行滤波,通过比例积分控制算法产生原子钟控制调整量,对原子钟进行频率调整,使得原子钟的输出频率锁定在外部时间源的1PPS 信号上。

图5 基于共视时差补偿的铷钟驯服原理框图Fig.5 Block diagram of disciplined rubidium clock based on Beidou common view time difference compensation
基于共视时差补偿后的驯服铷钟,输出1PPS的相位波动受到抑制,相位偏差得到补偿,可作为现场校准的时间参考源。
3.3 实验分析
3.3.1 常规驯服模式
设置铷钟为常规驯服模式,即关闭北斗共视比对时差的补偿功能,但仍通过共视比对链路对驯服铷钟输出的1PPS 进行时差比对。未用共视时差补偿的24 h 驯服比对结果如图6所示。
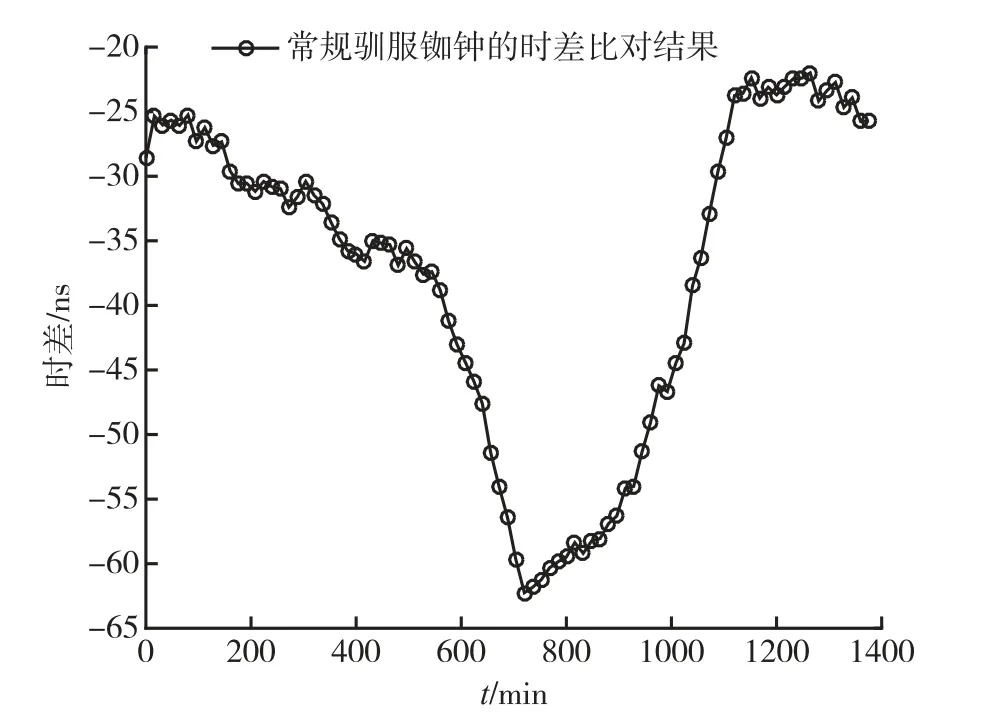
图6 常规驯服铷钟的时差比对结果图Fig.6 Result of time difference comparision from conventional disciplined rubidium clock
图6 中,相邻两个比对结果间隔16 min,即每16 min进行一次时差比对,分析24 h 的比对结果,最大偏差为-22 ns,最小偏差为-62 ns,均值为-37 ns。
3.3.2 基于北斗共视时差补偿的驯服模式
设置铷钟为北斗共视时差补偿驯服模式,即打开北斗共视比对时差的补偿功能,同时通过共视比对链路对驯服铷钟输出的1PPS 进行时差比对。基于共视时差补偿的24 h 驯服比对结果如图7所示。

图7 共视补偿后的驯服铷钟时差比对结果图Fig.7 Result of time difference comparision from disciplined rubidium clock based on Beidou common view compensation
图7 中,相邻两个比对结果间隔16 min,即每16 min 进行一次时差比对,分析24 h 的比对结果,最大偏差为10 ns,最小偏差为-9 ns,均值为2 ns。
3.3.3 数据分析
对两种方法的结果进行比对分析,数据比对如表1所示。实验中的北斗共视比对链路已经过校准,共视链路比对不确定度优于3 ns。

表1 两种方法的结果比对Tab.1 Results comparision of the two methods(单位:ns)
由表1 可见,常规驯服模式的时差峰峰值为40 ns,均值为-37 ns。而基于北斗共视时差补偿的驯服模式时差峰峰值为19 ns,均值为2 ns。采用共视时差补偿后的结果,时差波动即峰峰值相对于补偿前缩小了1 倍;且基于共视比对时差可有效补偿接收机的内部时延,因此均值也从-37 ns 提升到了2 ns。
可见,采用共视时差补偿后的内部时基1PPS相对于UTC(BIRM)的定时偏差不超过10 ns,该值对时间码的现场校准具有十分重要的意义,影响最终的时码测量不确定评估。
4 测量不确定度评估
4.1 1PPS 信号测量不确定度
1PPS 信号测量不确定度主要来源于设备内部时基1PPS 定时偏差的最大允许误差和TDC 时差测量的最大允许误差,如表2所示。

表2 1PPS 信号测量不确定度Tab.2 Uncertainty of 1PPS measurement
通过北斗共视时差比对校准,设备内部时基1PPS(含天线及接收机)的最大允许误差为±10 ns,按均匀分布,包含因子为,则设备内部时基1PPS 引入的不确定度分量u1为5.8 ns。TDC时差测量最大允许误差为±1 ns[13],按均匀分布,包含因子为,则TDC 时间测量最大允许误差引入的不确定度分量u2为0.6 ns。重复性引入的分量uA为0.1 ns。以上影响分量相互独立不相干,因此,1PPS 信号测量的合成标准不确定度的计算公式为[14-16]:
经分析,1PPS 信号测量的扩展不确定度为11.6 ns,k=2。
4.2 B(DC)码测量不确定度
B(DC)码信号测量不确定度主要来源于设备内部时基1PPS 定时偏差的最大允许误差、TDC 时差测量的最大允许误差和B(DC)码解调的最大允许误差。
B(DC)码解调模块由FPGA 实现,设备FPGA工作时钟为100 MHz,因此B(DC)码解调的最大允许误差为±10 ns,按均匀分布,分布因子为,则B(DC)码解调引入的不确定度分量为5.8 ns。其他各项的不确定分析与1PPS 信号类似,且各影响分量相互独立不相干,合成标准不确定度参考式(1)计算。
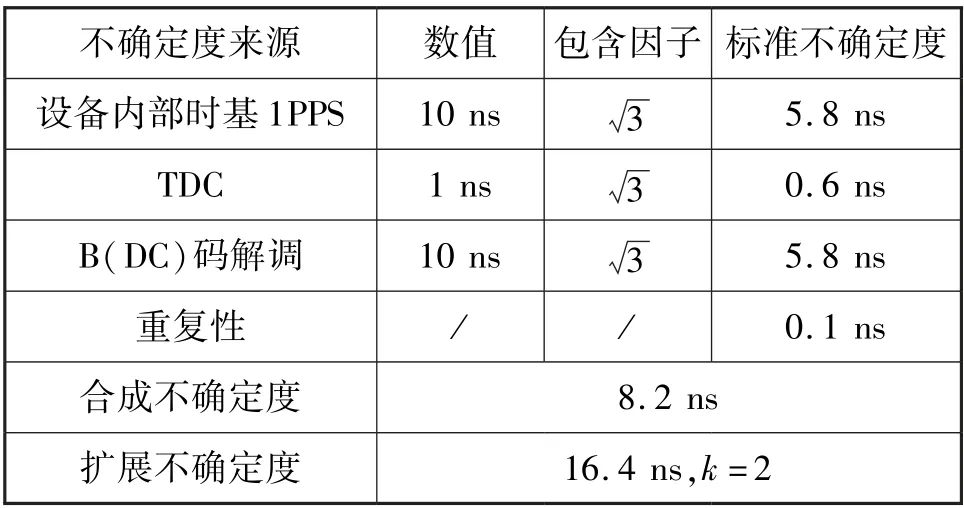
表3 B(DC)码测量不确定度Tab.3 Uncertainty of B(DC)measurement
经分析,B(DC)码测量的扩展不确定度为16.4 ns,k=2。
4.3 B(AC)码测量不确定度
B(AC)码信号测量不确定度主要来源于设备内部时基1PPS 定时偏差的最大允许误差、TDC 时差测量的最大允许误差、ADC 采样的最大允许误差和B(AC)码解调的最大允许误差。
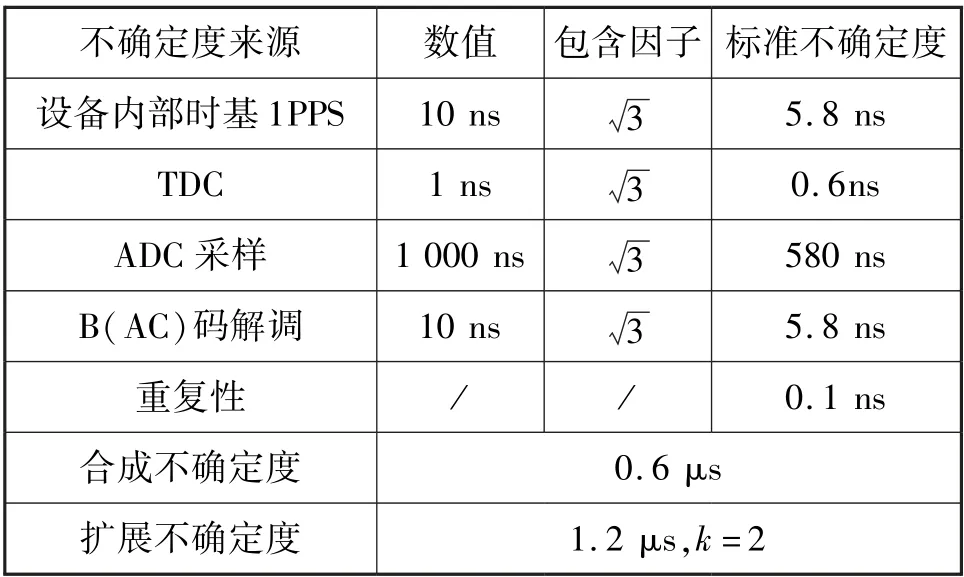
表4 B(AC)码测量不确定度Tab.4 Uncertainty of B(AC)measurement
ADC 采样时钟使用1 MHz 时钟,因此ADC 采样的最大允许误差为±1 μs,按均匀分布,分布因子为,则ADC 采样引入的不确定度分量为580 ns。B(AC)码解调模块由FPGA 实现,设备FPGA 工作时钟为100 MHz,因此B(AC)码解调的最大允许误差为±10 ns,按均匀分布,分布因子为,则B(AC)码解调引入的不确定度分量为5.8 ns。其他各项的不确定分析与1PPS 信号类似,且各影响分量相互独立不相干,合成标准不确定度参考式(1)计算。
经分析,B(AC)码测量的扩展不确定度为1.2 μs,k=2。
5 结束语
基于本方法研制的现场校准装置,其内部时基相对于UTC(BIRM)的定时偏差优于10 ns,1PPS 和B(DC)测量不确定度小于20 ns,B(AC)测量不确定度小于1.5 μs。该装置在时间码校准方面具有使用便携、可现场校准、周期短和测量精度高等优点,能够满足众多时间码的现场校准需求。
猜你喜欢
雪豆月读·中年级(2022年6期)2022-05-30
雷达与对抗(2020年2期)2020-12-25
娃娃乐园·综合智能(2020年10期)2020-11-10
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
动漫星空(2018年5期)2018-10-26
小哥白尼(军事科学)(2018年8期)2018-09-12
无线电通信技术(2016年6期)2016-12-20
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24