
八足机械螃蟹设计及其运动分析
2023-04-04 08:12陈书鸿刘方庆林益凡郭金泉
科技创新与应用 2023年9期
陈书鸿,刘方庆,林益凡,郭金泉*
(1.福州大学 机械工程及自动化学院,福州 350000;2.福建信息职业技术学院,福州 350000)
在许多河道、沿海区域都有蟹类的身影。蟹的尾部造型与其他的十目足不一样,卷缩于胸腔底下,背甲一般会更宽阔。胸足长在胸腔两侧,一对大螯是由首对胸足转化而成。寻常滨蟹的横行步态更是广为人知,这亦是大多数蟹类所共有的特点[1]。晚唐时期的诗人皮日休在《咏蟹》[2]一诗中说螃蟹“海龙王处也横行”。由此可见,“横行霸道”已经成为对蟹类的第一印象;而它那一对大螯更是让它“威风”不减。
目前有部分学者根据螃蟹的外形等特点,开展了仿真机械螃蟹的研究。韩国海洋科学研究院与韩国5 所高校共同开发了“螃蟹”型机器人[3],其具有多个活动枢纽,下潜深度达200 m,超声波摄像头保证在水波浑浊时也能拍到机身15 m 之内的画面,该螃蟹机器人于2014 年被运至彭木港投入“岁月号”沉船的搜救工作。美国西北大学技术员还自制出一种能站在硬币边沿的螃蟹[4]。该种微型的机械蟹能够“走动、屈曲、扭曲、拐弯和跳动”,研究组利用扫描的激光束在其身子的不同位置快速加热其身上的形状记忆合金材料,使其形变并进一步地促使机器人移动。国内首个自主研发的仿生螃蟹[1],在2007 年7 月进行了上百次试验,最终成功。这种仿生机械蟹大约有60 cm 长,35 cm 宽,25 cm厚,体重12 kg,能以0.54 km/h 的速度行进,这只仿生螃蟹配备GPS,可以在4 m 深的水下搜索、侦察和拍照。国内外学者虽然开展了相关的研究,但对螃蟹的“横行”和大螯的运作机理还认识不充分,因此有必要针对螃蟹这2 个特征开展系统研究和仿生学设计研究。本文通过仔细观察活体螃蟹的运动,利用仿生学原理设计了一款八足机械螃蟹,期望能以此对螃蟹的运动做更多结构学上的分析,并为管道等狭小地方的检测提供可行性方案。
1 仿生螃蟹的整体结构设计
仿生螃蟹由主体机构、步足运动机构、蟹钳夹持机构共同组成,如图1 所示。主体机构由支撑板、支撑架和电机架等组成,对称地设置。步足运动机构安装在基板前后对称位置,包括步足结构、传动齿轮、行走主动齿轮和行走步进电机。步进电机在底板上,而支撑板在底板的一端。行走传动装置设在2 个支撑板中间。行走的主动齿轮与步进电机的输出轴相配合。在每一个传动装置的前、后2 面上都装有一个步足结构。每个步足由3 个连杆和1 个足组成。主摇杆的一端固定于支承板中上部,而另一端则连接于足的一端;驱动连杆一端连接于传动齿轮,另一端连接于足的三分之一处;辅助摇杆一端固定于支撑板下方翼侧,另一端与驱动连杆的中部相连。蟹钳包括电机架、主动齿轮、齿杆、爪棒和连杆等。蟹钳主要由2 个不完整的钥匙状齿轮双摇杆机构组成,通过摆动方向舵实现蟹爪内部45°左右的摆动,模拟抓取动作。2 只蟹钳安装在脚部运动的主体上,整个蟹爪可由人工改变在连杆的不同高度,一对螯足对称放置如图1 所示。

图1 仿生螃蟹对称性结构
2 仿生螃蟹各运动构件设计
2.1 主体机构设计
仿生机械蟹的主体机构起到固定支撑其他运动构件的作用。本产品设计为驱动电机和电池预留了位置,使得动力原件能够安装在机械蟹的主体机构上。主体机构为前后对称布置,包括支撑板、电机架、支撑架和连杆等部分。其中,前支撑板上安装有连杆可以用来限制机械蟹钳的高低位置,如图2 所示。
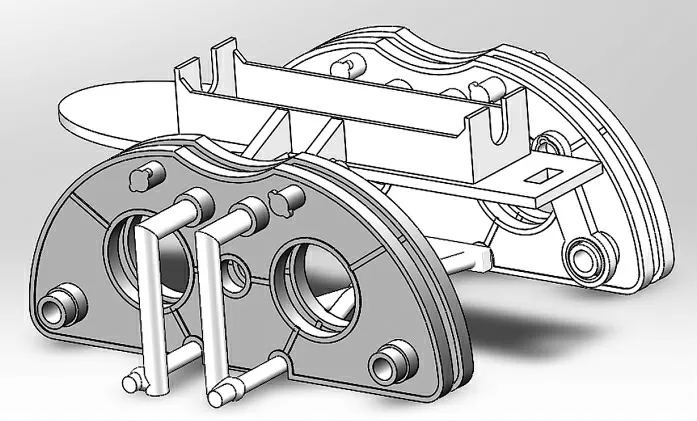
图2 机械蟹主体框架
2.2 步足机构设计
通过对螃蟹横向的观察,本文采用曲柄摇杆机构进行仿生学设计,但是最常见的平面四杆机构并不能实现螃蟹腿部抬起、迈步、收回的周期动作。因此,压片机上加压机构的平面六杆形式对于设计螃蟹腿部运动很有参考意义,该机构采用双支点固定、转动输入和滑动输出等方式实现药片粉料的上料、加压和下料功能,因此只要取消移动副的固定约束,并移除滑块,其最后一级连杆的运动方式就可模拟螃蟹腿部运动。通过施加的曲柄摇杆机构,实现了蟹腿的仿真,用双马达分别控制两对步足[5]。利用单片机作为核心控制器对步进电动机进行细分驱动和转速检测并输出相应信号到各个驱动器以实现不同功能,每台电机都控制着前后4条腿。
2.3 蟹腿的设计简图
采用简化画法绘制腿部机构,如图3 所示。其中,大腿根侧与传动齿轮均与机械螃蟹的机体连接,构成固定铰链。由于电动机通过传动机构驱动齿轮曲柄来改变腿与下肢之间的距离,从而达到调节腿部运动速度的目的。因此在电动机驱动齿轮曲柄旋转的过程中,大腿可以达到上摆的效果,即令小腿离开地面;而当大腿垂下的时候,小腿与地面接触,产生摩擦力。此时,通过连杆拉动并将其移动至合适位置后再停止驱动电机。由于电机一直处于转动状态,然后摇杆相对于电机摆动,从而带动电机沿规定方向移动。

图3 步足结构简图
2.4 步足的结构
如图4 所示,2 个步足之间由3 个齿轮连接。2 个带有3 个圆孔的支撑板通过销孔的过盈配合连接,板面间距比齿宽略大。支撑板中间3 个圆孔的位置分别约束3 个齿轮。由于电动机通过传动机构驱动齿轮曲柄来改变大腿与下肢之间的距离,从而达到调节腿部运动速度的目的。齿轮安装后的啮合状态确定仿生螃蟹步足初始状态,还确定仿生机械螃蟹步长与跨距。本设计是以确保机体稳定性为前提的,跨距、步长均可调整,具有分散性。两对步足齿轮铰链处相隔180°时,整个机构作交替周期运动以达到机械横向爬行的目的[6]。
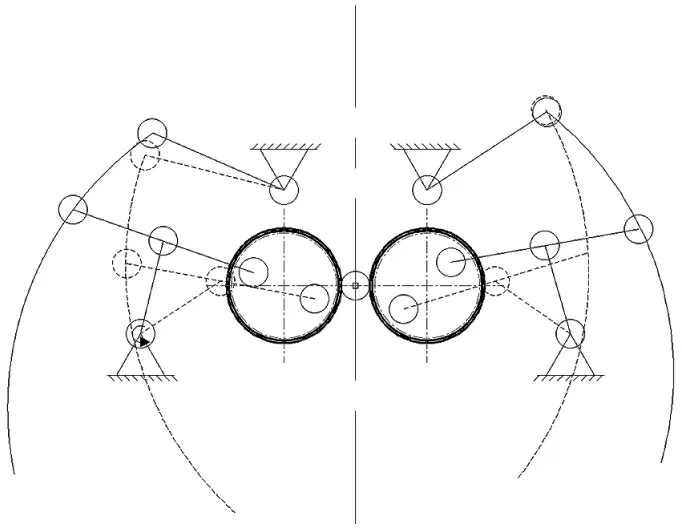
图4 两对步足的结构
螃蟹其实是可以做到小幅度绕弯儿的,腿关节并不是直直地只能向一个方向弯曲,而是由软组织相联的,能够略微地把腿朝前、后弯,不过幅度较小,因此转弯半径小。但作为仿生机械螃蟹,能够克服这一螃蟹天生的缺陷。本文采用双马达的不等速转动驱动2 齿轮组差速转动,由此导致前、后体线性位移速度不一致,实现螃蟹横向弧线移动。采用双马达等转速反向旋转,前躯体和后躯体的线性位移的大小一致而方向相反。此时前躯体和后躯体步长一致,可以达到原地转向的目的。如图5 为机械蟹躯体示意图。转向运动时,旋转中心始终在躯体中轴线上,旋转曲率由电机轴的转向以及转速决定。
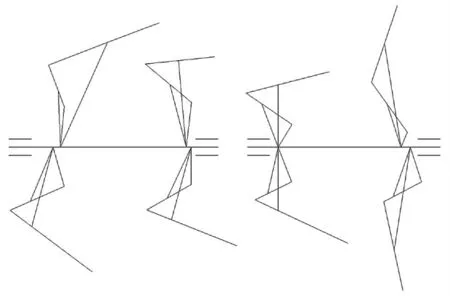
图5 机械螃蟹躯体示意图
2.5 蟹螯机构设计
螃蟹的蟹螯类似钳子可以一开一合地抓取食物,可以通过二爪式机械爪来实现。尽管螃蟹的钳子只有上半钳可以移动,但该产品为增加夹取空间而利用齿轮组来控制两对夹爪进行开合动作。本新型机械通过1 台电动机驱动齿轮转动,进而将蟹2 只前螯拉起并张合以达到对蟹螯夹紧作用。如图6 所示机构是1 种单自由度齿轮摇杆机构,这就意味着只要装上1 个可通过单片机进行正反转控制的舵机,就能达到夹取和松动的效果。如图6 所示,最下方的主动齿轮带动右侧齿杆旋转,右侧齿杆带动左侧齿杆旋转。2 个双摇杆机构相向摆动,使从动摇杆的末端相向运动或反向运动。

图6 蟹螯机构简图
3 仿生螃蟹运动设计
3.1 步足运动设计
该仿生螃蟹的最大特征在于它与普通关节机器人的驱动模式不同[7]。如图7 所示为步足运动机构,主齿轮由步进电机带动逆时针旋转,从而带动两侧的传动齿轮等速顺时针旋转。传动齿轮与步足共同组成步足六杆机构。步足六杆机构由5 个活动构件及7 个旋转副构成,自由度为1。因此只要确定了步进电机的转速及转向,足端的运动轨迹便可以唯一确定。传动齿轮带动左右步足做不同形式的运动——左步足足端迅速抬起并向外伸展,然后缓慢落地并回收,接着再向外伸展;右步足迅速抬起并向内回收,然后缓慢落地并向外伸展,接着再向内回收。左右步足虽然运动模式不同但都具有急回特性,使足端在与地面接触时不会打滑,同时保证了运动的效率。

图7 步足运动主体结构
其中传动齿轮、驱动连杆、主摇杆、辅助摇杆、足和支撑板构成齿轮曲柄摇杆机构[1]。主齿轮与2 个相隔180°的对心驱动齿轮相配合,主齿轮转动驱动齿轮曲柄摇杆,从而带动足运动。合适的尺寸设计以确保步足能够有规律地进行迈步运动。
3.2 蟹螯运动设计
蟹钳的总体结构为每只蟹钳本体分别装在蟹脚板的两边,蟹钳本体由连杆、爪杆、钥匙型齿杆、连接臂、抓握舵机、摆动舵机、电动机架和固定架组成。固定支架将蟹钳和支承板固定起来,摇摆舵机安装在连杆臂上,电机架安装在连杆臂上,摇摆舵机的输出轴与连杆臂相连。连接臂用销子固定在固定架上。在电机架上还装有2 个钥匙型齿杆及2 个摇杆。爪杆的一端与齿杆形成活动铰链,中间部分与摇杆相连形成铰链。2 个钥匙型齿杆对称地布置并啮合在一起。在抓握式舵机旁,有1 把钥匙形的齿杆,其与抓握舵机的输出轴相啮合。在蟹钳上装有摇摆的舵机,主轴由电动框架连接至固定托架,可作45°的旋转。2 个齿杆、4 个爪杆及4 个连杆组成了1 个左右对称的双摇杆机构。钥匙型齿杆属于外啮合,转动方向相反。其带动蟹螯左右两侧的双摆动机构,实现了钳夹和松开的动作。如图8 为蟹螯夹取的姿态,从蟹鳌结构俯视图图9 来看,主动齿轮逆时针旋转,通过外齿轮副带动与其相连的齿杆顺时针旋转,同时带动另一齿杆逆时针旋转。这样,与齿杆相连的2 个双摇杆机构相向摆动,2 个爪杆相互靠近,实现抓取动作。实际上,为了便于螃蟹的蟹螯下半部分固定,只有通过上半部分的旋转才能实现夹取动作。因此,生物蟹蟹螯张开的极限角度通常不大于90°,夹取范围有限。
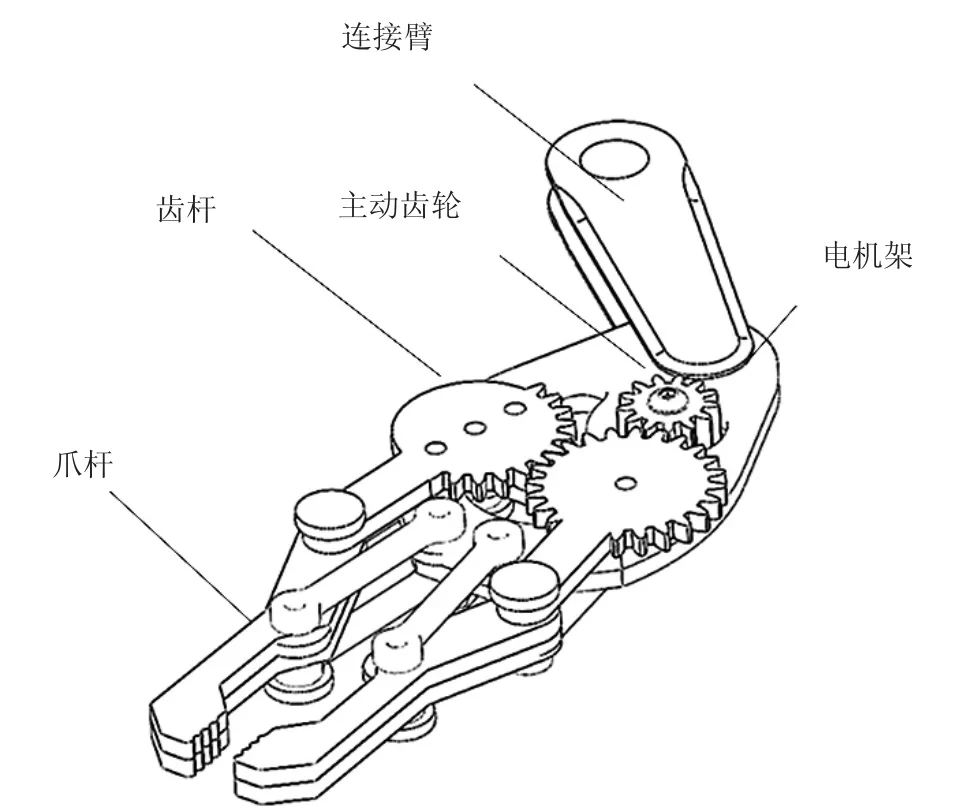
图8 蟹螯结构模型(略去固定架)

图9 蟹螯结构俯视图
4 仿真内容
4.1 步足运动仿真
按照型综合和尺度综合的结果,使用Solidworks软件对机械蟹主体各个零件进行建模,然后将各个零件进行装配。使用软件自带的运动算例功能对其进行运动仿真。机械蟹主体构造的模型如图10 所示。对主齿轮添加一个旋转马达,使其作为模拟电机带动主齿轮旋转。对环境添加重力等条件,前后2 个螃蟹主体对称放置,减少其在运动时的重心偏移。对于同一传动齿轮带动的2 个步足,做一前一后的交替运动,类似人类的行走动作。仿真结果为八只步足交替做周期运动,控制旋转马达的转速和转向可以控制机械蟹的移动方向和移动速度。
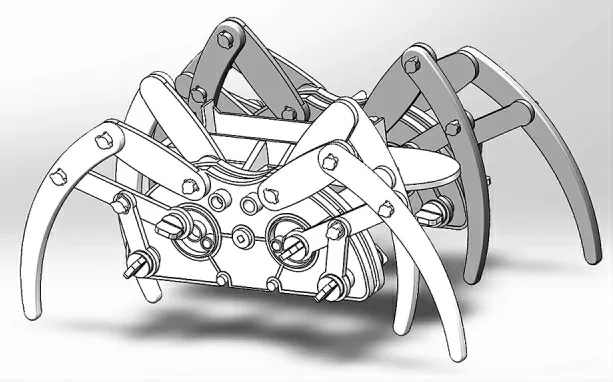
图10 螃蟹主体步足运动
4.2 步足运动分析
所设计的八足机械螃蟹运动中心对称,均由电机驱动,故运动分析过程中可对一侧的模型进行分析。通过设计各个零件之间的连接,同时选用点面约束来限制蟹腿与地面之间的关系,用于模拟机构的运动特性。驱动连杆、主摇杆、辅助摇杆和足之间采用转动副进行连接。主齿轮与2 个相隔180°的对心驱动齿轮进行齿轮配合,对心驱动齿轮与连杆之间通过转动副进行连接,来实现整体结构的运动过程。
为了建立装卸单元系统的动力学仿真模型,首先需要将装卸单元系统进行简化。简化的目的是减少最终转配体中的零件数目,仅保留存在相对运动的构件,将相对静止的零件整合为1 个构件,以大幅减小在动力学分析软件中的约束施加的难度。
在结构设计中,机械螃蟹同侧所对应的蟹腿与整体的连接点分别位于对芯驱动齿轮180°处,同一时间当一对腿与地面相接触时,另一对腿处于悬空状态,其中运动状态如图11 所示,通过循环往复,周而复始,从而达到前进的效果。

图11 运动状态对比图
在横向运动过程中,决定机械螃蟹运动速度是电机转速,通过系统控制选定不同转速可以改变机械螃蟹的横向前进速度,并且可以通过设定螃蟹两边电机不同转速来实现转向。以对芯驱动齿轮转速30.0 rad/s为例,对应机械螃蟹横向的运动位移与速度曲线如图12 所示。由图可知,螃蟹横向运动为周期性运动,并且能够实现所基本要求的横向移动。进而通过整理分析得到不同转速对应螃蟹横向运动位移与速度曲线分别如图13 和图14 所示,由图13 和图14 可知,可以选定不同的电机转速,以适应不同的运动环境。

图12 机械螃蟹横向运动位移与速度曲线图

图13 不同转速对应螃蟹横向运动位移曲线图

图14 不同转速对应螃蟹横向运动速度曲线图
4.3 蟹螯运动仿真
按照型综合和尺度综合的结果,使用Solidworks软件对蟹钳各个零件进行建模,然后将蟹钳各部分零件进行装配。使用运动算例功能对其进行运动仿真,绘制出爪棒前点的运动轨迹(图12)。在设计时摇杆部分形状为平行四边形,故爪棒的运动为平移,保证爪棒的锯齿部分始终相对。齿杆能够绕轴销旋转90°,故单个爪棒前点的运动轨迹为四分之一圆弧。一对爪棒前点的运动构成了半圆弧,使机械蟹螯能够向前抓取体长不超过半圆弧直径的物体。爪棒的平移始终沿着半圆弧的切线方向,若将其看作集中于前点的质点,则该质点做匀速圆周运动,运动速度由电机转速决定。除此之外,通过在蟹螯前端放置压力传感器,来检测蟹螯在夹取过程中的受力变化,可以更方便地控制整个机构运动。

图15 蟹螯前爪轨迹
5 结论
本文对活体螃蟹的运动和大螯运作进行了观察研究与尺寸测量,通过仿生学原理设计了一种具有八脚结构、两钳组成的仿生机械螃蟹,它是由行走步进电机带动的摆动机构来完成基本的行走和转向;由抓握舵机驱动双摇杆机构,可以实现蟹钳钳口的开闭;用2 个不完整的双摇杆机构来控制抓持舵机,以完成对钳夹的抓取。通过对设计的仿生机械螃蟹进行型综合和尺度综合,并进行运动仿真,使仿生机械螃蟹能够模拟蟹类的横向运动和蟹螯的夹持运动2 个重要特征。这种仿生机械螃蟹外形更像是真正的螃蟹,可以更逼真地模拟出正常的螃蟹在生存环境中的移动,能够适应崎岖的地形或跨越大型障碍物(如沟、坎等),具有成本低、传动灵活、维护简单和还原度高等特点,同时为在管道等狭小地方的检测提供一种可行的方案,具有很强的工程意义和应用价值。但由于初步尝试仿生机械设计,并未制作样机实验,因此后续将在样机实验和具体工程应用上作进一步探讨。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
南方农机(2021年3期)2021-02-07
装备制造技术(2020年2期)2020-12-14
湖北农机化(2020年17期)2020-11-02
机电工程技术(2020年2期)2020-03-26
汽车实用技术(2017年16期)2017-09-21
阅读与作文(小学高年级版)(2017年1期)2017-04-01
阅读与作文(小学高年级版)(2017年3期)2017-04-01
学苑创造·A版(2017年2期)2017-01-19
中南大学学报(自然科学版)(2016年2期)2017-01-19
