
基于模糊PID算法的电动侧开门控制器的设计
2023-04-01 07:46苗文博徐洋谭伟江松熊秋涵
汽车零部件 2023年3期
苗文博,徐洋,谭伟,江松,熊秋涵
1.重庆邮电大学自动化学院,重庆 400065;2.重庆利龙科技产业(集团)有限公司,重庆 400020
0 引言
近年来,随着汽车工业的高速发展以及电子工业的快速进步,电子汽车智能化的程度成为现代衡量汽车水平的关键标准之一,汽车电子占整车制造成本比例逐年增加,并且未来的比例也会持续增加。
电动侧开门(power hinge door,PHD)由超声波雷达、有刷直流电机、霍尔传感器等元器件组成,从而实现对车门动作的控制。PHD具有以下基本功能:智能防撞、智能防夹、车门调速。同时对不同的汽车停靠环境进行全面的考虑,如极端天气、 狭小空间等,通过算法编写实现PHD的基本功能在不同工况下仍正常运行,使得整个系统做到智能化的同时也能确保系统的安全与稳定性。总体而言,在车门控制模块上集成更多的功能,开拓市场的空白,具有很大的研究意义与价值。
1 总体设计方案
采用ST公司的STM32F4系列芯片作为处理核心来开发汽车的电动侧开门功能。因为该设计是基于有刷直流电机和霍尔传感器组合的方式进行开发的,要实现防夹、堵转、调速功能都离不开霍尔信号的检测。在进行电机转速检测时,霍尔信号的异常变化、处理后的数值丢失都会直接影响电动侧开门的功能实现。所以霍尔传感器的信号采集检测与处理十分重要。电动侧开门示意如图1所示。
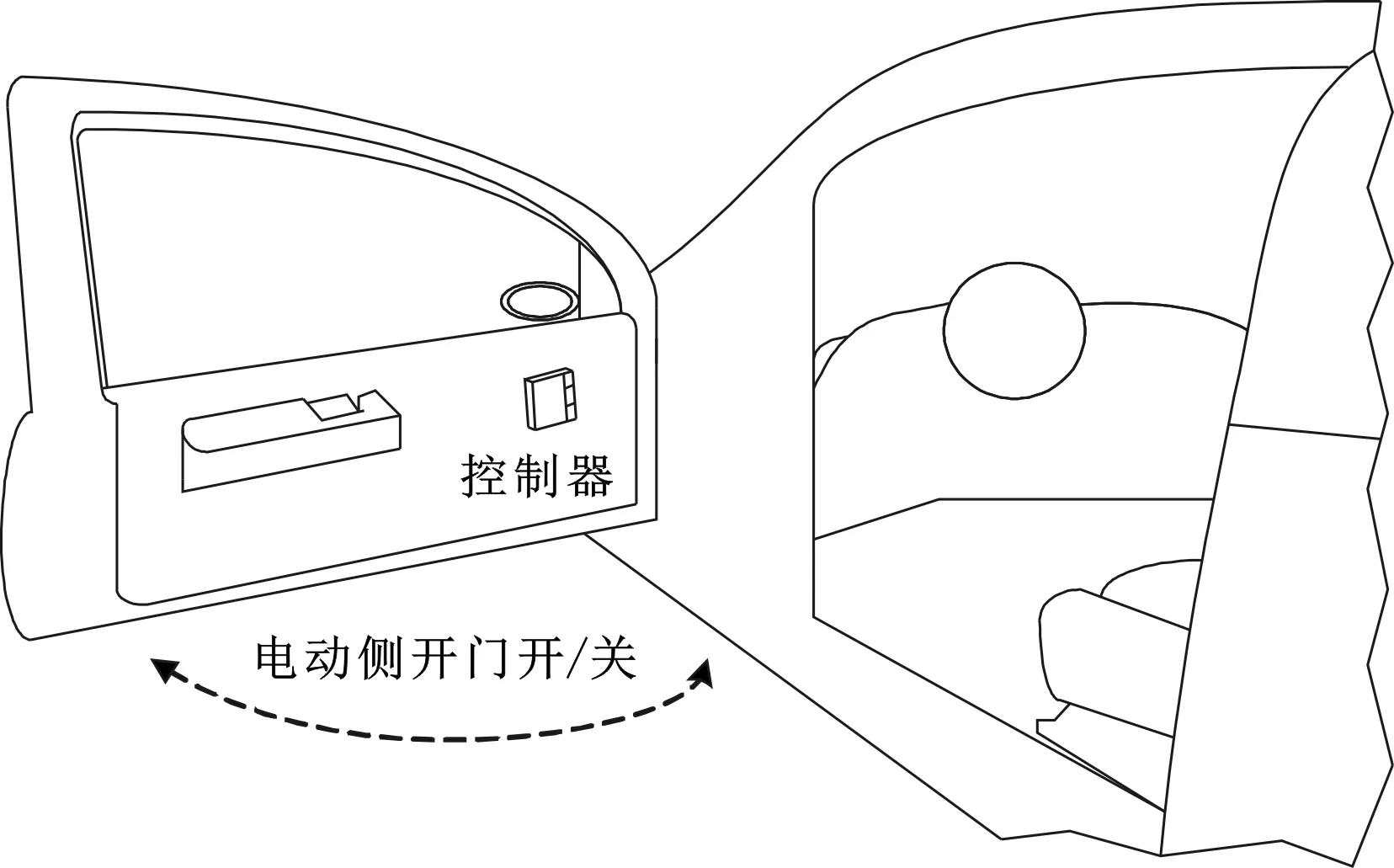
图1 电动侧开门示意
电机霍尔信号的采集检测与处理主要分为软件和硬件两个部分。硬件部分主要负责电机霍尔信号的采集和信号放大、滤波等处理。软件部分主要负责对采集到的霍尔信号进行转速转换,将霍尔信号与转速实时联系起来方便后期调速,同时计算采集到的霍尔信号数量从而得到当前车门的位置。
2 硬件设计
从适用性、稳定性和成本的角度考虑,在开发设计时尽量选用性价比高的元器件[1],在该车门设计上选用了ST公司的STM32F407芯片。通过车门开关的锁信号和BCM接收到的CAN报文进行车门动作的策略处理。
MCU将会把检测到的霍尔信号用于以下两个部分的决策:一个通过计算霍尔信号的数量来获取当前车门的实时位置;另一个通过模糊PID进行转速的调节。两个横相结合一同实现电动侧开门的防夹、堵转和调速功能。PHD硬件设计架构如图2所示。
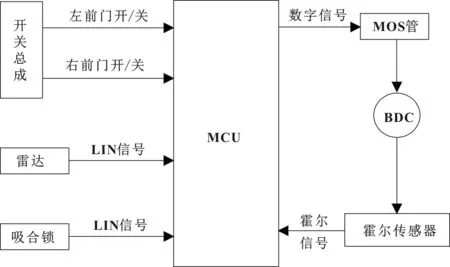
图2 PHD硬件设计架构
2.1 霍尔传感器模块
霍尔传感器模块输出的霍尔信号处理电路如图3所示,其由差分放大电路和滤波电路两个部分构成。
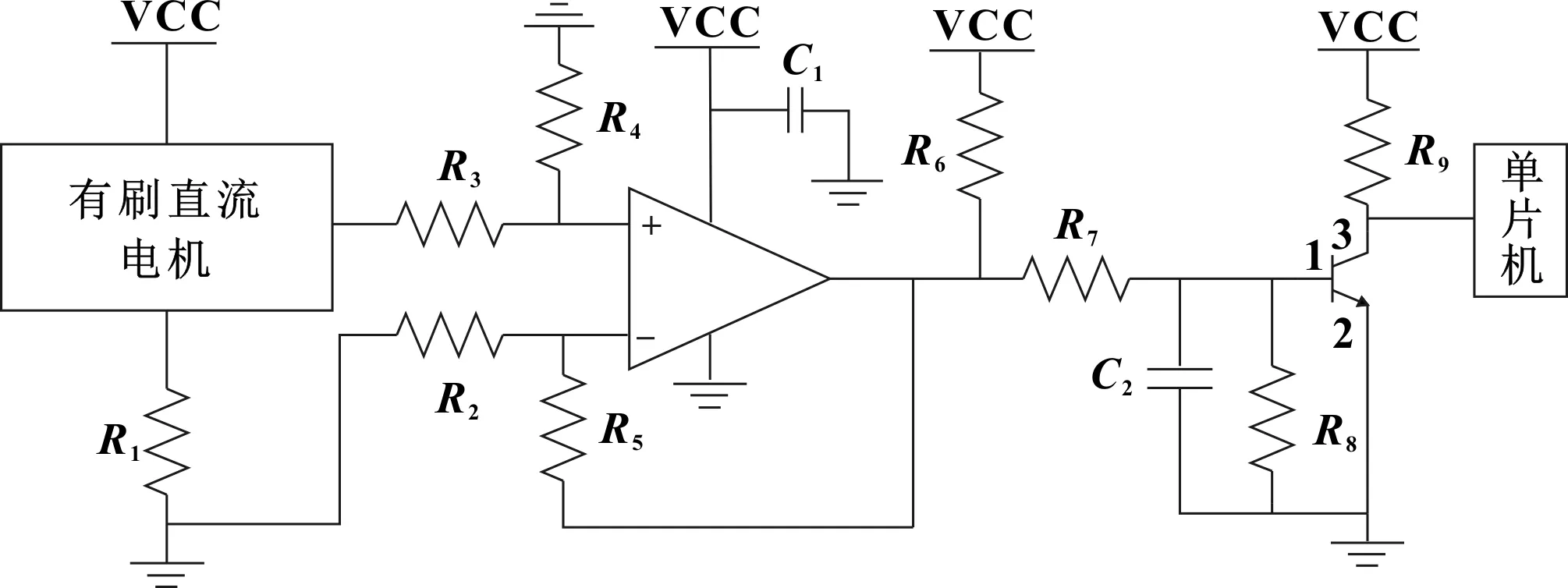
图3 霍尔信号处理电路
在霍尔传感器中霍尔电压会随着磁场的变大而减小,而霍尔电压值通常很小,只有几个毫伏,所以选择用差分放大电路来放大霍尔传感器的电压信号。进行驱动时,滤波前霍尔信号会有许多毛刺,一般的RC滤波无法有效地滤除这些毛刺,所以选择在RC滤波后加上一个NPN三极管来保证滤波的质量,三极管响应速度有最小宽度的要求,当信号小于最小脉宽要求时才能保证正常输出而不失真。经过处理后将霍尔信号输入给MCU进行算法处理。
2.2 雷达模块
为了实现在开门时遇见障碍物自动停止,选择在车门上安装超声波雷达模块,超声波雷达可以返回一个探测距离,但在同一发射波上的障碍物距离一样时,无法确定具体的位置。如图4所示,A、B两处探测距离一致都为d,但通过单个雷达无法确定是在A处还是B处。所以在车门上合适距离安装两个雷达模块,当两个雷达共同探测到障碍物时即刻停止车门运动,如图5所示。此方案可以有效减少环境干扰,同时能够确定20~40 cm范围内障碍物的位置。
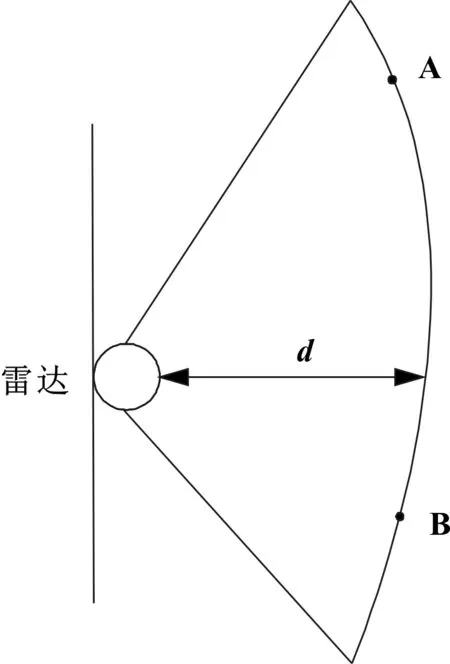
图4 雷达检测
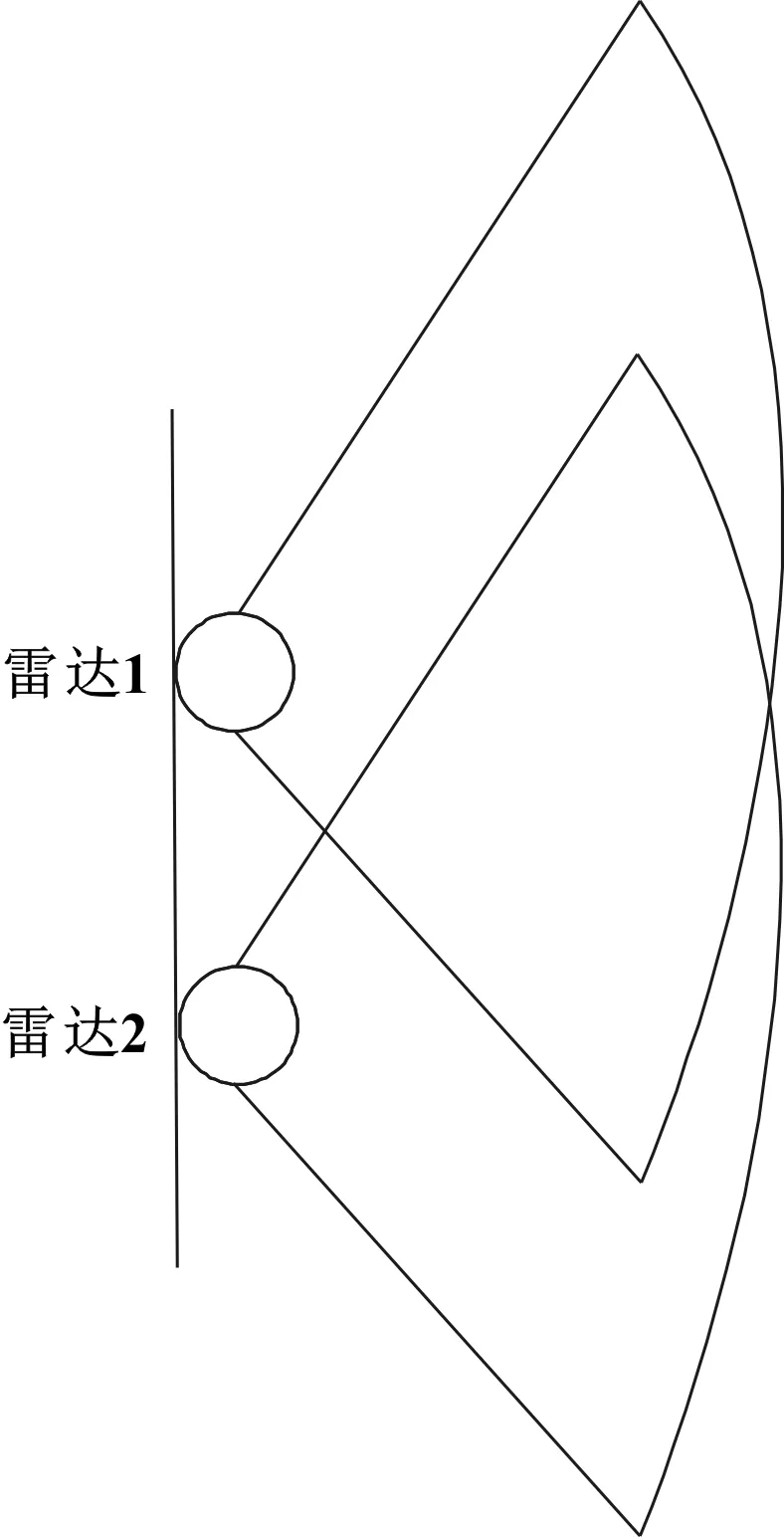
图5 雷达安装
3 软件设计
系统的软件设计主要分为主程序和子程序两个部分,主程序主要完成任务的调度分配;子程序主要由系统初始化代码、功能代码(防夹、调速)、中断服务等构成。
软件的设计流程为:先判断BCM是否发出锁信号,若锁信号发出则驱动电机运动同时进行模糊PID调速;再由霍尔传感器读取当前霍尔信号来判断电机转速是否达到目标设定值,若未达到目标值则继续进行调速;在运动过程中通过霍尔脉冲计数来判断车门是否运动到规定位置,同时开启雷达检测,若雷达检测到了障碍物则会停止运动,如果未检测到雷达信号而霍尔信号达到了防夹阈值则开启防夹功能。软件设计流程如图6所示。

图6 软件设计流程
3.1 车门防夹算法设计
电动侧开门防夹功能的实现需要确定两个核心问题:一是车门位置的精确判断;二是夹物力的判断。
采用的霍尔电机具有两根信号线,分别是霍尔速度信号线和霍尔方向信号线。当霍尔电机运行,正转霍尔信号会产生一个高电平,反转会产生一个低电平,以此来判定当前电机的运转方向;同时根据不同速度霍尔电机速度信号线产生的霍尔脉宽也不同,速度越快脉宽越窄。
根据车门电机不同的转速,相应的霍尔传感器采集到的脉宽也不同,本文采用霍尔脉冲速度差检测法。霍尔传感器会在电机旋转后输出脉冲信号,脉冲的宽度为电机旋转特定角度所经过的时间,一旦发生夹持,电机转速下降,脉冲宽度增大[2],继而实现电机运动状态的判断。经测试电机正常运行时的霍尔脉冲波形如图7所示,电机堵转时的脉冲波形如图8所示。
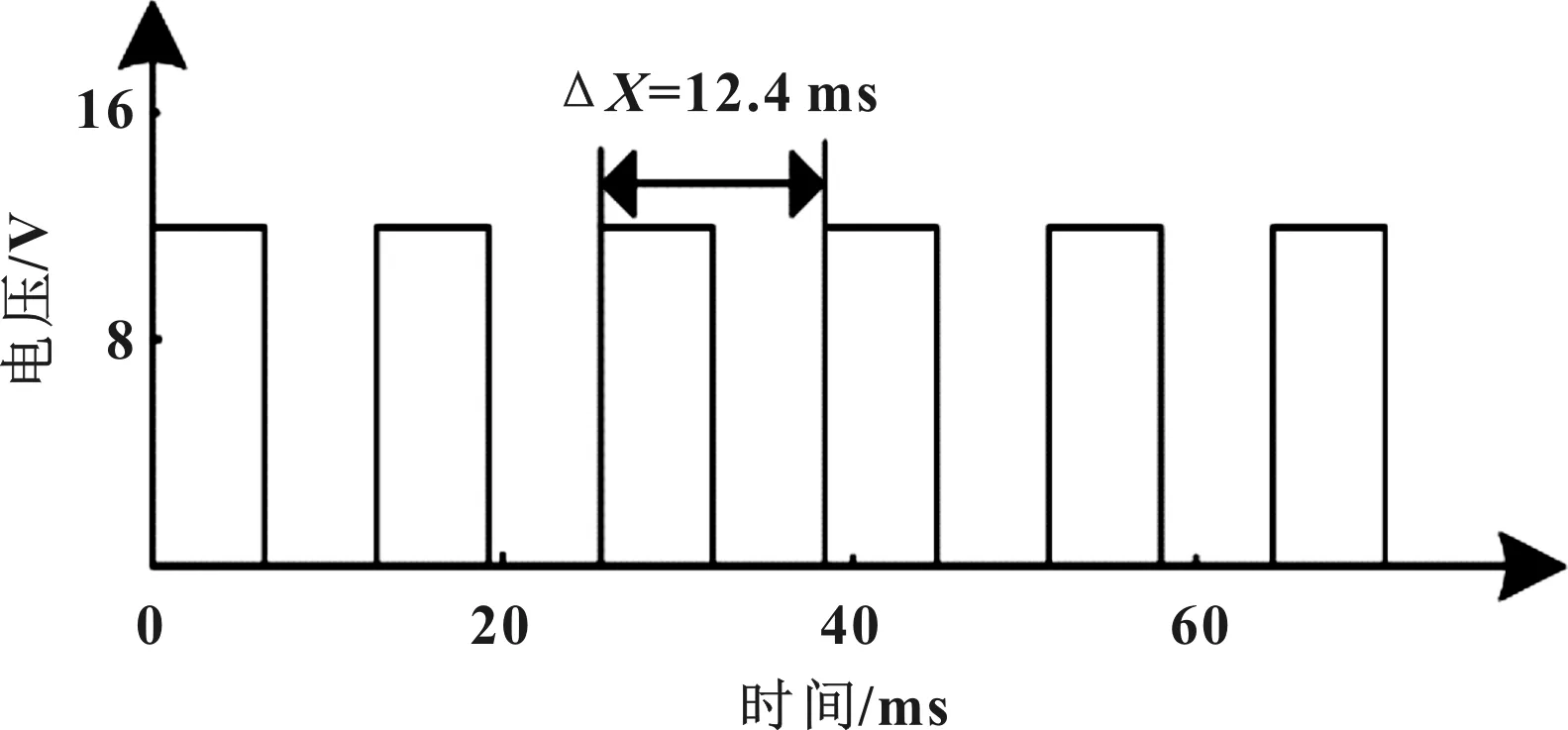
图7 电机正常运行时的霍尔脉冲波形
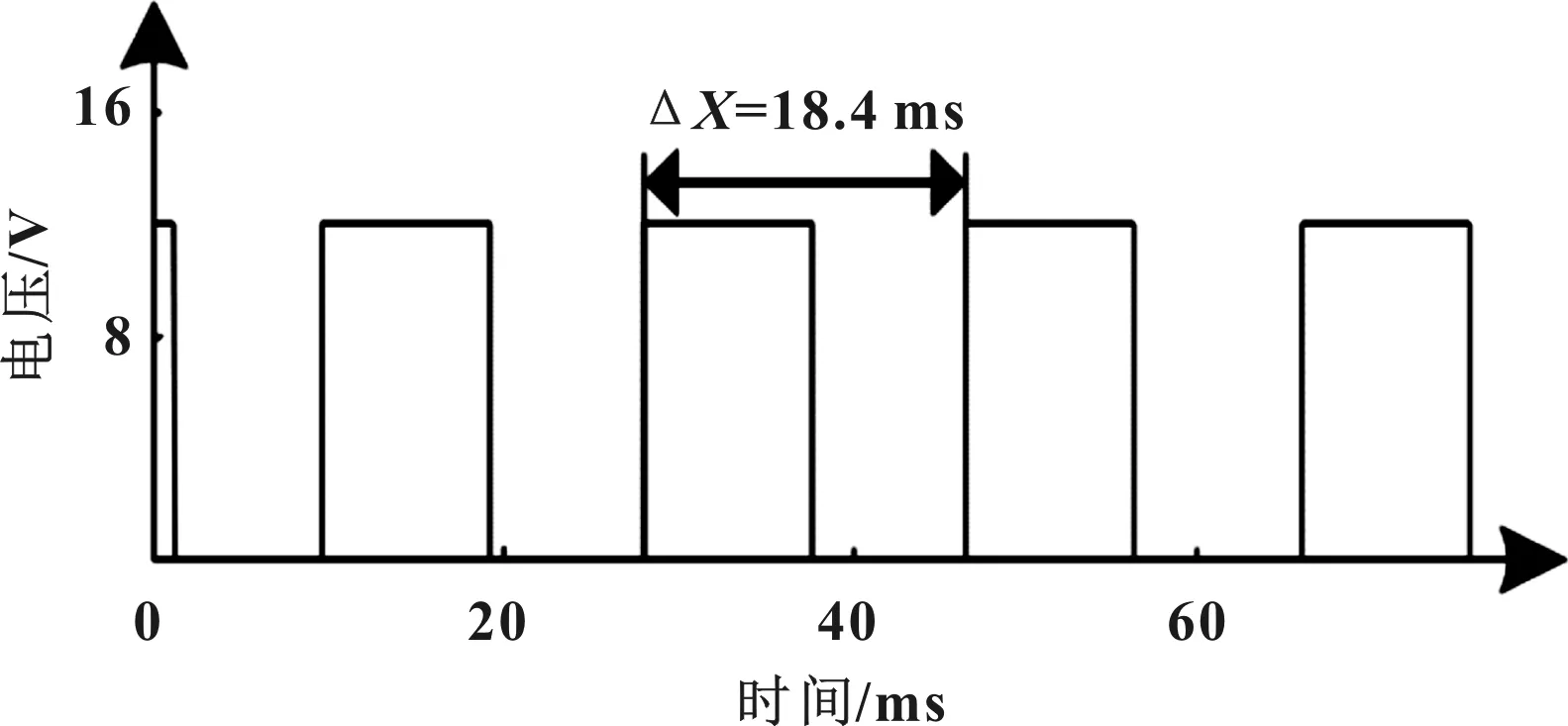
图8 电机堵转时的脉冲波形
通过这两个同时间基准下不同情况的霍尔脉冲波形可知,遇见障碍物时电机电流增大,对应的霍尔脉宽也就变宽[3],相应的电机转速也就降低。所以可以根据霍尔脉冲宽度信息来判断所受到的阻力是否达到阈值,就可以依此设计算法判断是否开启防夹功能。
3.2 模糊PID调速算法设计
由于常规PID控制在实际应用中较差,在本设计中使用模糊PID控制器对电机进行调速,主要分为模糊推理块和PID调节模块部分。模糊推理块以霍尔电机的霍尔脉宽偏差e和偏差的变化率ec作为输入[4],输出变量分别为PID控制器的修正量ΔKp、ΔKi、ΔKd。
所用的离散PID控制算法为:
(1)
设定输入ec、Δec和输出变量的模糊子集为{NB、NM、NS、Z、PS、PM、PB},对应含义为{负大,负中,负小,零,正小,正中,正大};再设定每个变量的隶属度函数[5]。模糊PID规则见表1。
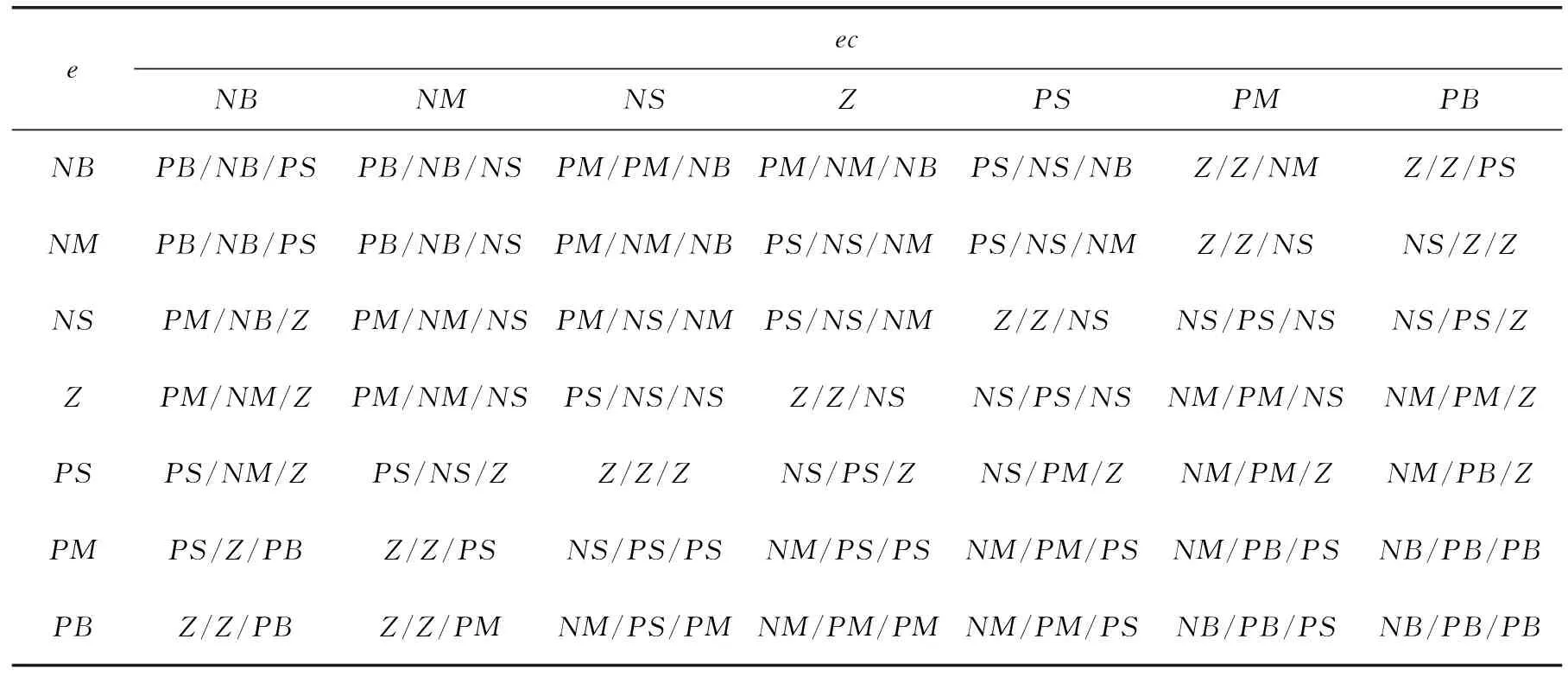
表1 模糊PID规则
在去模糊部分选择常用的重心法,计算公式为:
(2)
式中:z0为模糊控制器输出量接模糊后的精确值;zi为模糊控制量论域内的值;μc(zi)为zi的隶属值。
在线性运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正,其工作流程如图9所示。
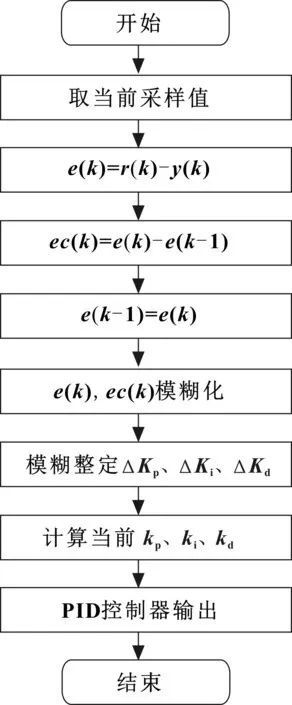
图9 模糊PID工作流程
4 系统测试与验证
本次设计是在实车上进行测试的,通过把设计好的控制器安装车门内侧的指定位置来控制整个系统的正常运行[5]。通过CANOE和外接的按键来发送数字信号和模拟信号给控制器进行开关门信号的发送。
将电动侧开门的防夹算法用于实车上进行压力检测,在车门关闭的过程中只有进入防夹检测区域才会开启防夹功能[6-8]。在受到阻力时电机转速下降,霍尔脉宽增大,当脉宽值达到设定阈值(防夹力为70N)后,系统将进行反转,如图10所示。
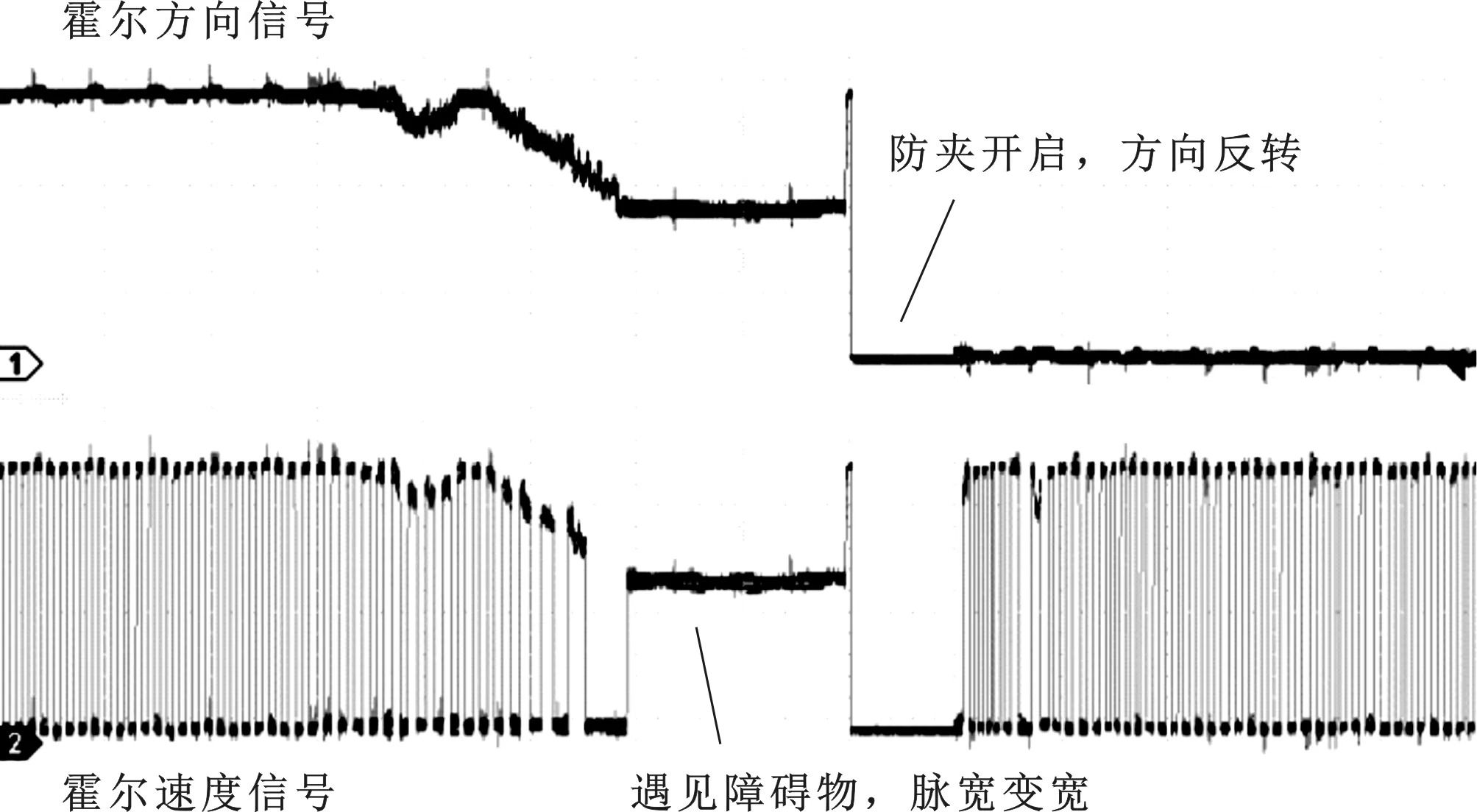
图10 车门防夹反转时霍尔脉宽的变化
在多次测试后,电动侧开门防夹成功率在99%以上,并记录了3个不同的防夹力测试点,每个测试点记录5组数据,其防夹力变化见表2。
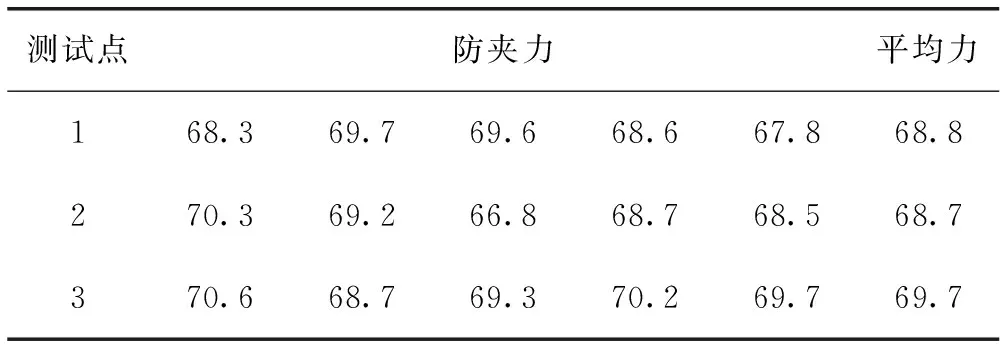
表2 电动侧开门防夹时防夹力变化 单位:N
从表2数据可以看出,在车门的不同点进行车门防夹时,防夹力基本在70N以下变化,满足设计要求。
利用Freemaster软件对车门控制系统进行霍尔脉宽实时检测,观察模糊PID调速情况,如图11所示。
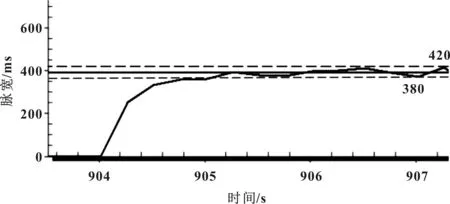
图11 模糊PID调速
可以看出系统的振幅误差在5%以内,基本完成调速且速度变化稳定在设计要求范围内。
5 结束语
经过对电机的霍尔脉宽检测,设计了一款具有多功能的电动侧开门控制系统,该系统具有防夹、调速、雷达检测等功能,且经过多次试验测试,该设计满足防夹力普遍小于70N、车门开关速度稳定、雷达在20~40cm实现障碍检测的设计要求,系统达到了稳定、可靠、智能化控制的目的。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
小读者(2021年2期)2021-03-29
汽车观察(2018年10期)2018-11-06
车迷(2017年10期)2018-01-18
北京汽车(2017年3期)2017-10-14
童话王国·文学大师班(2017年6期)2017-07-10
工程建设与设计(2016年1期)2016-02-27
太空探索(2015年6期)2015-07-12
汽车维修与保养(2015年2期)2015-04-17
汽车维护与修理(2015年1期)2015-02-28
