
基于新能源汽车CAN 总线波形的故障诊断方法
2023-03-30 07:02校金龙
时代汽车 2023年6期
校金龙
河南工业贸易职业学院 汽车工程学院 河南省郑州市 450012
1 引言
据不完全统计,2021 年我国新能源汽车的年产销已经超过300 万辆[1],截至目前,保有量超过500 万辆,位居世界第一。随新能源汽车产业发展而来的是汽车后市场的服务升级。新能源汽车的检测与维修是新能源汽车后市场的一个重要板块。其是否能够健康发展关系到新能源汽车产业的发展速度和发展质量。CAN总线是新能源汽车进行信息交互的重要载体,特别是动力CAN 总线的通信,关系到新能源汽车的高压上电以及高压安全。目前,大多数汽车维修企业认为新能源车涉及高压,CAN总线的诊断与维修技术含量较高,存在畏难情绪,造成诊断效率低、维修质量差的局面。本研究针对新能源汽车CAN 总线故障提出快速化、低成本的诊断方法,实现了新能源汽车的快速诊断与维修,降低了企业维修成本。
2 CAN 总线结构和工作原理
2.1 CAN 总线结构
CAN 总线由双绞线、收发器、控制单元等组成[2],收发器和控制单元多集中在一起。两根双绞线一条被标记为CAN-H,另一条被标记为CAN-L[3]。CAN 总线两条双绞线之间的电阻值一般为60Ω,由两个120Ω 的电阻并联而成,被称为终端电阻。美国汽车工程师学会将CAN 总线按照系统的复杂程度、信息量、传输速度、可靠性等分为A、B、C、D、E 五类[4]。在新能源汽车中根据CAN 总线传输数据的功能分为动力总线、车身总线、诊断总线、UDS 总线、底盘总线等。
2.2 CAN 总线工作原理
总线型结构的CAN 总线连接原理如图1所示。由同一个总线连接起来的控制单元接收与发送信息的协议、速度等均相同。CAN总线通过仲裁判断控制单元发送信息的优先级别,优先级别高的具有优先发送权利。任何一个控制单元作为信息发送单元时,其他均作为信息接收单元,接收单元可以选择接收对自己有用的信息。

图1 总线型拓扑结构连接原理图
当总线上控制单元不发送信息时,CAN-H 和CAN-L 导线上的电压均为2.5V,称之为隐性电压,当总线上控制单元发送信息时,CAN-H 导线上跳变为3.5V 的显性电压,CAN-L 导线上跳变为1.5V 的显性电压,如图2(a)所示。信号接收器接收到信号后对CAN-H 和CAN-L 电压进行计算,得到差分电压,如图2(b)所示。控制单元对一组差分电压进行分析、翻译和校验,得到对应的信息。
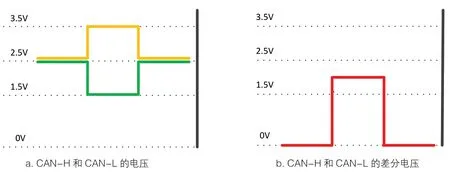
图2 CAN 总线波形
3 CAN 总线拓扑结构
CAN 总线的拓扑结构有星型、环型、总线型。星型结构中央处理器负载较重,线路负载率较低,拓展性较差;环型结构可靠性差,拓展麻烦;总线型结构传输效率高,拓展性能好。目前应用比较广泛的为总线型拓扑结构。
比亚迪秦的CAN总线包含动力CAN总线、舒适网CAN 总线、ESC 网CAN 总线、电池子网CAN 总线、充电CAN 总线等,均采用总线型拓扑结构。其动力CAN 总线的电路原理如图3 所示[5]。经测试,两个120Ω 的终端电阻一个在电池管理器中,另一个在网关中。

图3 比亚迪秦的动力CAN 总线电路原理图
吉利帝豪EV450 的CAN 总线包含动力CAN 总线、车身CAN 总线、底盘CAN 总线、UDS CAN 总线等,均采用总线型拓扑结构。其动力CAN 总线的电路原理如图4 所示[6]。经测试,两个120Ω 的终端电阻一个在电池管理单元BMS 中,另一个在电机控制单元MCU 中。
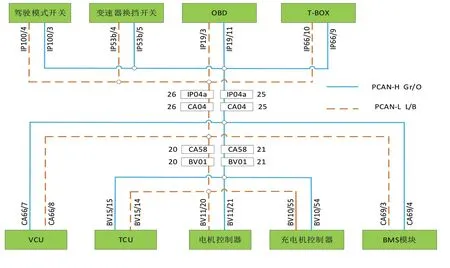
图4 吉利EV450 的动力CAN 总线电路原理图
4 动力CAN 总线故障波形
4.1 开路故障波形
CAN 总线的开路包含CAN-H 开路和CAN-L 开路,以及两者同时开路。通过对比亚迪秦EV、吉利帝豪EV450 纯电动汽车试验表明,对于总线型CAN 网络,某一个控制单元的CAN-H 或者CAN-L 开路,将导致该控制单元无法与其他控制单元通信。如果该控制单元(例如:BMS、MCU 等)参与上电流程,会导致车辆无法正常上电和行驶;而另一些节点(例如:诊断口)的总线开路对车辆的运行没有影响。
逐一设置拓扑结构中节点的CAN 总线开路,同时测量总线开路节点处的波形和其他节点处的波形,结果如图5 所示。对开路状态下的故障波形进行分析可知:CAN-H 开路、开路节点接收信息时,测得开路节点处CAN-H 波形“从”了CAN-L 的波形,其他节点处的波形基本正常;CAN-L 开路、开路节点接收信息时,测得开路节点处CAN-L波形“从”了CAN-H 的波形,其他节点处的波形基本正常。

图5 CAN 总线开路波形图
4.2 对+B 短路故障波形
对+B 短路包含CAN-H 对+B 短路和CAN-L 对+B 短路,以及同时对+B 短路。通过对比亚迪秦EV、吉利帝豪EV450 纯电动汽车试验表明,对于总线型CAN 网络,某一个控制单元的CAN-H 或者CAN-L对+B 短路,其他控制单元的CAN-H 或者CAN-L 也会对+B 短路。该CAN 网络中的所有节点之间均无法实现通讯,导致该CAN网络所涉及的功能无法实现。
逐一设置拓扑结构中节点的CAN 总线对+B 短路,同时测量总线短路节点处的波形和其他节点处的波形,如图6 所示。对短路状态下的故障波形进行分析可知:CAN-H对+B 短路时,测得CAN-H 和CAN-L 的波形基本为一条直线,电压约为+B 电压,隐性状态有脉冲突变,但脉宽较小;CAN-L对+B 短路时,测得短路节点处CAN-H 与CAN-L 波形均为一条直线,且CAN-H 和CAN-L 电压均约等于+B 电压。
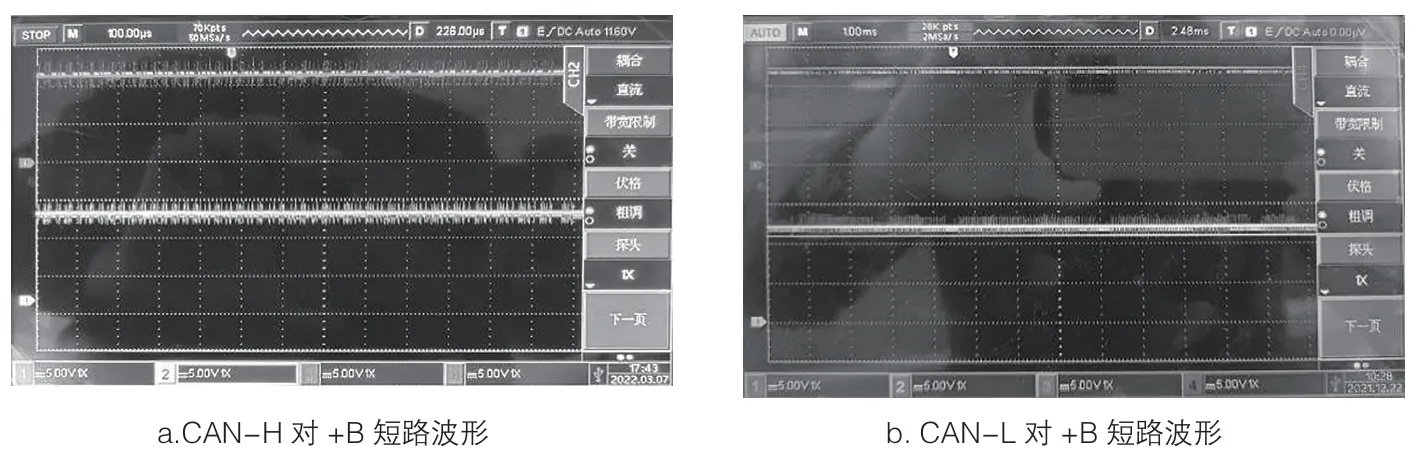
图6 CAN 总线对+B 短路波形
4.3 对地短路故障波形
对地短路包含CAN-H 对地短路和CAN-L 对地短路,以及同时对地短路。通过对比亚迪秦EV、吉利帝豪EV450 纯电动汽车试验表明,对于总线型CAN 网络,某一个控制单元的CAN-H 或者CAN-L 对地短路,其他控制单元的CAN-H 或者CAN-L 也会对地短路。只有CAN-L 对地短路时,不影响拓扑结构中控制器(节点)之间的通讯,车辆能够正常上下电。
逐一设置拓扑结构中节点的CAN 总线对地短路,同时测量总线短路节点处的波形和其他节点处的波形,如图7 所示。对短路状态下的故障波形进行分析可知:CAN-H对地短路时,测得短路节点处CAN-H 与CAN-L 波形均为一条直线,CAN-H 和CAN-L 隐形电压均等于0V,显性状态存在脉冲电压,但宽度远小于正常波形;CAN-L对地短路时,测得短路节点处CAN-L 波形基本为一直线,CAN-H 波形幅值约为2.2V,脉宽与正常波形相同,因此对于采用差分信号传递信息的CAN 网络基本能够正常通讯。
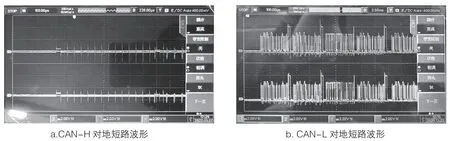
图7 CAN 总线对地短路波形
5 结论
本文基于新能源汽车CAN 总线波形进行了动力CAN 总线故障的研究。通过大量试验得出如下结论:
(1)当CAN 总线波形CAN-H 线“从”了CAN-L 时,表示CAN-H 开路;当CAN 总线波形CAN-L 线“从”了CAN-H时,表示CAN-L 开路。
(2)当两条CAN 总线波形均为直线,电压约等于电源电压时,则表明CAN 总线对电源正极短路。
(3)当CAN 总线波形有一条为直线且等于0V时,另一条有明显的波形,幅值为2.2V左右,宽度正常,则表明CAN-L 对地短路。如果两条CAN 总线波形均为0V 的直线,则表明CAN-H 对地短路。
试验证明本方法适用于新能源汽车CAN总线的故障诊断,采用示波器测量CAN 总线的波形,通过对波形进行分析,找出与波形对应的故障形式,从而确定故障原因。对于多点故障也可通过分析波形确定故障原因。为新能源汽车的检测维修提供了新方法,减少了设备投入,提高了维修效率,提升了企业效益。
猜你喜欢
建材发展导向(2021年7期)2021-07-16
青年歌声(2019年2期)2019-02-21
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
知识经济·中国直销(2017年11期)2017-11-28
中国公路(2017年16期)2017-10-14
作文大王·笑话大王(2016年6期)2016-06-22
作文大王·笑话大王(2016年4期)2016-04-27
作文大王·笑话大王(2016年3期)2016-03-11
作文大王·笑话大王(2016年1期)2016-02-24
