
基于图像处理的目标活动分析方法
2023-03-29 05:34:04徐才进倪辰辰
航天电子对抗 2023年1期
高 飞,徐才进,梁 璟,倪辰辰,杨 玲
(中国电子科技集团公司第二十九研究所,四川 成都 610036)
0 引言
随着现代战场环境日益复杂以及战场目标活动愈发频繁,传统目标情报中包括的基本属性、信号参数等静态信息已经难以满足联合作战对支援情报的需求。基于历史侦察数据的目标活动规律分析可以挖掘出重点目标的典型航路和频繁活动区域,不仅能为联合作战指挥控制、作战筹划等业务提供战场目标数据支撑,还能在战场态势感知中用于目标活动异常检测和预警等。受益于战场侦察能力的提升和情报信息系统能力的增强,战场目标的历史侦察数据在系统中持续积累,为目标活动分析提供了良好的条件。作为战场情报分析的主要组成部分,目标活动分析依赖战场侦察数据开展工作,传统的目标活动分析方法[1]以侦察数据统计、挖掘为主,辅以人工标注等干预手段,虽然能得到较为完整准备的目标活动分析结论,但是存在挖掘算法设计困难、大数据计算耗时较长以及人工标注效率较低等问题。蓬勃发展的图像处理技术为目标活动分析提供了新的技术思路,将侦察数据在地图上进行图像化,使用图像处理方法进行目标活动分析,可以有效减少算法设计难度、提升数据分析效率并增强分析结论可视化水平。
本文创新性地将图像处理方法引入目标活动规律分析。由于环境和装备能力的影响,不同目标的历史侦察数据情况有所不同,根据数据量的数据分布情况可以分为历史稀疏航迹点和历史密集航迹点2 种情况:对于稀疏航迹点通过侦察数据图像化、二值化以及图像滤波实现了目标活动航路提取;对于密集航迹点通过侦察数据热度图生成、图像去噪、图像增强实现了目标活动区域提取。最后,使用仿真数据验证了将图像处理技术引入目标活动分析的有效性。
1 稀疏航迹点目标活动航路分析
针对稀疏型航迹点数据,主要研究基于历史稀疏型航迹点的航路分析,具体处理分析流程如图1 所示。

图1 稀疏航迹点目标活动航路分析流程
1.1 原始数据解析与航迹图平滑化
通过战场情报侦察等手段获取的目标位置信息主要是经纬度信息,在进行基于数字图像处理的活动航路分析前,需要将这种地理坐标系统转换为平面坐标系统,形成平面坐标航迹图。考虑到侦察时的环境影响、装备状况和目标混叠等情况,原始侦察数据的经纬度信息中可能存在一定误差和噪声,可以采用数字图像处理中平滑模糊滤波方法[2],使航迹图像平滑模糊化并具有一定的容错性。
图像空间滤波器一般由一个邻域和对邻域所包围图像像素执行的预定义操作组成。对每个像素滤波器产生一个新像素,其坐标等于邻域中心坐标,其像素值是滤波的响应结果。滤波器依次访问输入图像中的每个像素后,就生成了滤波后的图像。对图像中的任意一点(x,y),其像素值为f(x,y),滤波器的响应g(x,y)是滤波器系数与由该滤波器所包围的图像像素的乘积之和。滤波器邻域一般为奇数尺寸,最小为3×3。对大小为m×n的邻域,设奇数m=2a+1,奇数n=2b+1,其中a、b为正整数。使用大小为m×n的滤波器对大小为M×N的图像进行线性空间滤波,可表示为:
例如,对于3×3 邻域的线性空间滤波器:
1.2 航迹图二值化
进行目标活动航路分析时,图像中只存在航路区域和非航路区域,是一个典型的二值化问题。图像的二值化就是通过确定一个阈值,把灰度图像的每个像素按其灰度值分为2 类,使得原图像变为二值图像,即灰度图像的二值化[3]。
设灰度图像P尺寸为m×n,经过上文滤波后处理的每一像素灰度值为x(i,j)。图像像素灰度均值为:
设整数min、max,其中min 为最小灰度像素灰度值向下取整,max 为最大灰度像素灰度值向上取整。
设整数k∈[min,max],对图像进行遍历,得到图像中灰度值近似为k的像素点个数Ak。遍历开始时Ak=0,对任一像素点,若k-0.5≤x(i,j) <k+0.5,则Ak=Ak+1。遍历后得到序列Amin,Amin+1,…,Amax,对数列A进行排序,由大到小得到新的序列B1,B2,…,Bm,与B1相对应的An的角标n即为图像中像素出现频率最高的灰度,由此可得到灰度分布中一个较大的峰值处的灰度值。通常图像的灰度均值应在两峰值之间,故可用下述方法确定另一峰值的位置,即按顺序将B2,B3,…对应An'的角标n'代入式|n-n'|,当出现第一个满足条件的n'时,认为该n'为另一波峰灰度值。所要取的阈值T应在n与n'之间 :
取得阈值后,对图像进行二值化运算得到边缘清晰的二值化图像:
1.3 航路区域提取
提取出二值化后的航迹图像后,研究采用数字图像处理中的数学形态学滤波方法,分析提取出航路区域。数学形态学可以很好地对图像中存在的一些空洞或断点进行处理,得到更加本质的图像形态,主要包括膨胀、腐蚀、细化、粗化、开运算和闭运算等。
膨胀是将目标区域的背景点合并到该目标物中,使目标物边界向外部扩张的处理。选取结构元素B,将图像X中的每一个像素点扩大为B+x,膨胀可以使图像断点连合,成为一个整体。
腐蚀是将目标区域的边界收缩,直观上就是使得目标区域变小,与膨胀是互为对偶的过程,但是并非经过2 种运算后图像可以还原。选取结构元素B,将图像中的X的B+x收缩为点x。腐蚀可以消除边界处的干扰点。
另外,开运算和闭运算是为了解决膨胀和腐蚀运算改变图像大小而提出来的。开运算是先腐蚀后膨胀的过程,可以消除图像中细小噪声,平滑物体边界。闭运算是先膨胀后腐蚀的过程,可以消除图像中存在的空洞,平滑物体边界。
2 密集航迹点目标活动区域分析
针对密集型航迹点数据,主要研究基于历史密集型航迹点的区域分析,具体处理分析流程如图2 所示。

图2 密集航迹点目标活动区域分析流程
2.1 原始数据解析与航迹点热度图生成
通过解析原始数据,将经纬度信息转换为平面坐标系下的航迹图,便于进行图像处理。统计每个像素点区域目标出现的热度(像素点位置出现一次航迹点,便将像素点灰度值加1 或者其他固定值),分析处理后,目标出现越频繁的像素点区域灰度值越高,图像对应区域就越高亮显示。
2.2 航迹点热度图去噪
通过图像学中值滤波去除热度图中的“非频繁噪声点”。中值滤波的基本原理是把数字图像或数字序列中一点的值用该点的一个邻域中各点的中值代替,从而消除孤立的噪声点[4]。
设二维矩[xij]表示一副数字化的图像(其中i、j表示各像素点的位置,xij表示各像素点的灰度值),W[xij] 表示对图像[xij]中的点xij做窗口操作,Med{xij}表示对窗口W[xij]内的所有点取中值,若[yij]为图像[xij]经过中值滤波后的输出图像,滤波窗口的大小为m×n(其中m、n为奇整数),那么:
2.3 航迹点热度图增强
在数字图像处理中,直方图均衡化(HE)是一种最常用的空域直方图修正技术,其以概率理论为基础,运用灰度点运算来实现对图像直方图的变换,从而达到增强图像对比度的目的。HE 是把给定图像的直方图分布改造成均匀直方图分布,使输出像素灰度的概率密度均匀分布。基本原理是当图像中所有的灰度级出现的概率是一个均匀分布时,图像所暴露出来的信息量最大[5]。
空域图像增强的基本方法是对图像做灰度变换T:f(x,y)→g(x,y)。直方图修正试图寻找灰度变换函数T:它能把f(x,y)映射为g(x,y),使得g(x,y)的直方图Pg(r)具有指定的形式qr,因此它不是事先指定变换函数,而是从Pf(r)及qr中计算得到T。任一图像f(x,y)的直方图Pf(r)在变换s=T(r)下具有以下形式:
式中,T(r)在区间[0,1]上是单调上升的单值函数,对于0 ≤r≤1,有0 ≤T(r)≤1。实际应用当中,处理的图像都是数字图像,因此需要离散化,HE 的离散化表达式为:
式中,NL、NS分别是图像行数和列数,从而可以得到:

3 仿真验证
基于上述目标活动航路和活动区域分析方法,构造对应的稀疏、密集仿真数据,验证其理论算法和分析流程的有效性。
3.1 稀疏航迹点目标活动航路分析验证
构建稀疏的仿真目标活动位置信息,形成原始的平面坐标点迹图,如图3 所示。

图3 原始点迹图
基于时间序列绘制其航路,中间缺失的航迹点采用直线连接表示,如图4 所示。

图4 原始航迹图
采用高斯滤波进行原始航迹图平滑化处理。根据航迹点在图像上的成像分辨率大小,选择一定半径的高斯核对航迹图像进行平滤波滑,针对仿真数据选择的高斯核大小为5×5,滤波效果如图5 所示。
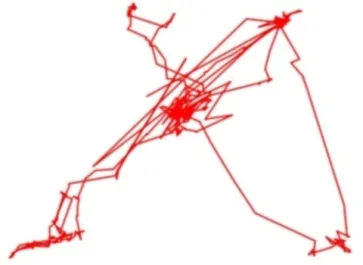
图5 航迹图平滑模糊滤波效果
航迹图平滑模糊滤波后,进行图像二值化处理,便于进行航路区域分析提取,试验效果如图6 所示。

图6 航迹模糊图像二值化
在二值化航迹图像的基础上,对二值化图像重复进行3×3 或5×5 等区域大小的图像学膨胀与腐蚀处理,重复进行2 至3 次,试验效果如图7 所示。

图7 航路区域提取效果
为验证航路分析提取效果,将其与原始航迹数据叠加进行验证,试验效果如图8 所示。

图8 航迹点航路验证
3.2 密集航迹点目标活动区域分集验证
构建密集的仿真目标活动位置信息,并将地球经纬度转换为平面像素坐标系下的绝对坐标值,形成如图9 所示的原始航迹点图像。

图9 原始航迹点图
在原始航迹点数据基础上,通过灰度图亮度值累加,生成航迹点热度图效果,如图10 所示。

图10 航迹热度图
在航迹点热度图基础上,利用图像中值滤波原理,去除非频繁活动航迹点,从而实现航迹点热度图去噪,效果如图11 所示。

图11 航迹热度图中值滤波效果
在通过中值滤波实现航迹热度图去噪后,采用直方图均衡化方法,拉升图像对比度,实现图像增强,将航迹热度图显性化,效果如图12 所示。

图12 航迹热度图增强效果
在航迹热度图增强效果基础上,进行图像二值化处理、图像滤波,实现航迹热度图区域的扩张和活动区域显性化,效果如图13 所示。

图13 航迹热度图频繁活动区域效果
将提取的频繁活动区域与原始数据进行叠加验证,可以看出频繁活动区域呈现出一些特定形状区域、直线区域或点状区域等,如图14 所示。

图14 频繁活动区域效果验证
将通过仿真数据提取到的活动航路、区域结果与原始航迹点进行叠加验证,可以看出该方法得到的结论能有效地描述不同数据分布情况下的目标典型航路和区域信息,结果边界光滑且对比显示清晰。
4 结束语
本文将数字图像处理的相关方法引入目标活动分析,对于稀疏航迹点通过航迹平滑化、二值化以及形态滤波实现了目标活动航路提取,对于密集航迹点通过热度图生成、去噪、增强、滤波实现了目标活动区域提取。并通过仿真数据验证了方法的有效性。相对于传统的基于统计和人工标注的方法,本文提出的方法能有效消除数据噪声和非频繁活动点的影响,通过形态学滤波消除由于侦察数据缺失导致的边界不平滑问题,并实现提取结果的增强显示。后续可以基于本文的活动分析结果,同样利用图像处理的方法判断目标当前是否在典型活动航路或区域内,判断其是否异常活动。■
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
装备制造技术(2020年9期)2021-01-26 00:14:34
青年歌声(2019年12期)2019-12-17 06:32:32
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
自动化学报(2017年5期)2017-05-14 06:20:56
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
光学精密工程(2016年1期)2016-11-07 09:01:59
海军航空大学学报(2015年3期)2015-11-11 17:18:49
中学历史教学(2015年11期)2015-11-11 07:09:09
