基于可视化界面多雷达信息融合教研系统设计
2023-03-27 02:04:20赵珊珊刘子威
计算机技术与发展 2023年3期
赵珊珊,刘子威
(1.南京邮电大学 电子与光学工程学院,江苏 南京 210023;2.南京邮电大学 通信与信息工程学院,江苏 南京 210003)
0 引 言
雷达信号处理是电子信息、电子对抗等专业的重要专业课程,其作为信号处理技术的复杂集成,包含大量信号处理、计算机、天线等相关知识,内容较为抽象,数学公式复杂[1-3]。同时,雷达系统的发展,也从单雷达处理向多雷达信息融合发展[4-7]。目前大多采用“教师理论讲授+课外实验”的方式展开,但实际装备形态多样,大多无法用于现场教学,学生接触实际装备难度大,接触时间有限,使得学习过程很不直观,影响学习热情,同时也影响了教师教授最新研究进展。因此,发展可视化仿真技术[8],开发一套适用于教学环境的雷达仿真系统尤为重要。
近年来,借助于MATLAB对系统仿真功能的集成越发完善[9],基于MATLAB的信息处理相关实验教学在不断地推进和优化[10-16]。为提高课堂教学质量,增强学生对系统的理解,并了解前沿发展,该文介绍了一项多雷达信息融合教研系统设计方法。该系统基于MATLAB环境下的图形用户界面工具(graphical user interface,GUI)建立了友好的交互界面,并包含有场景想定、回波信号生成、单雷达系统数据级仿真及多雷达数据融合等功能,使得课堂更加形象化和具体化,更有利于老师对雷达系统及多雷达信息融合进行讲解,也有利于学生的自主学习和理解,让学生真正学懂这门课程。
1 多雷达融合系统模型
多雷达融合系统由多部雷达对目标进行探测,各雷达探测得到目标量测信息或航迹信息,由数据传输链传输至融合中心站,在融合中心站对各雷达站量测数据加以联合、相关以及融合,以此来获得目标的精确的状态和属性估计,以及对战场态势、威胁和重要程度的综合评估,如图1所示。在现代战争中,雷达系统面临四大威胁,为了提高雷达系统的生存能力,多雷达组网融合是一种行之有效的方法。与单部雷达系统相比,多雷达融合系统具有更高的跟踪精度及抗干扰能力,更广的观测空域、时域和频域的能力。
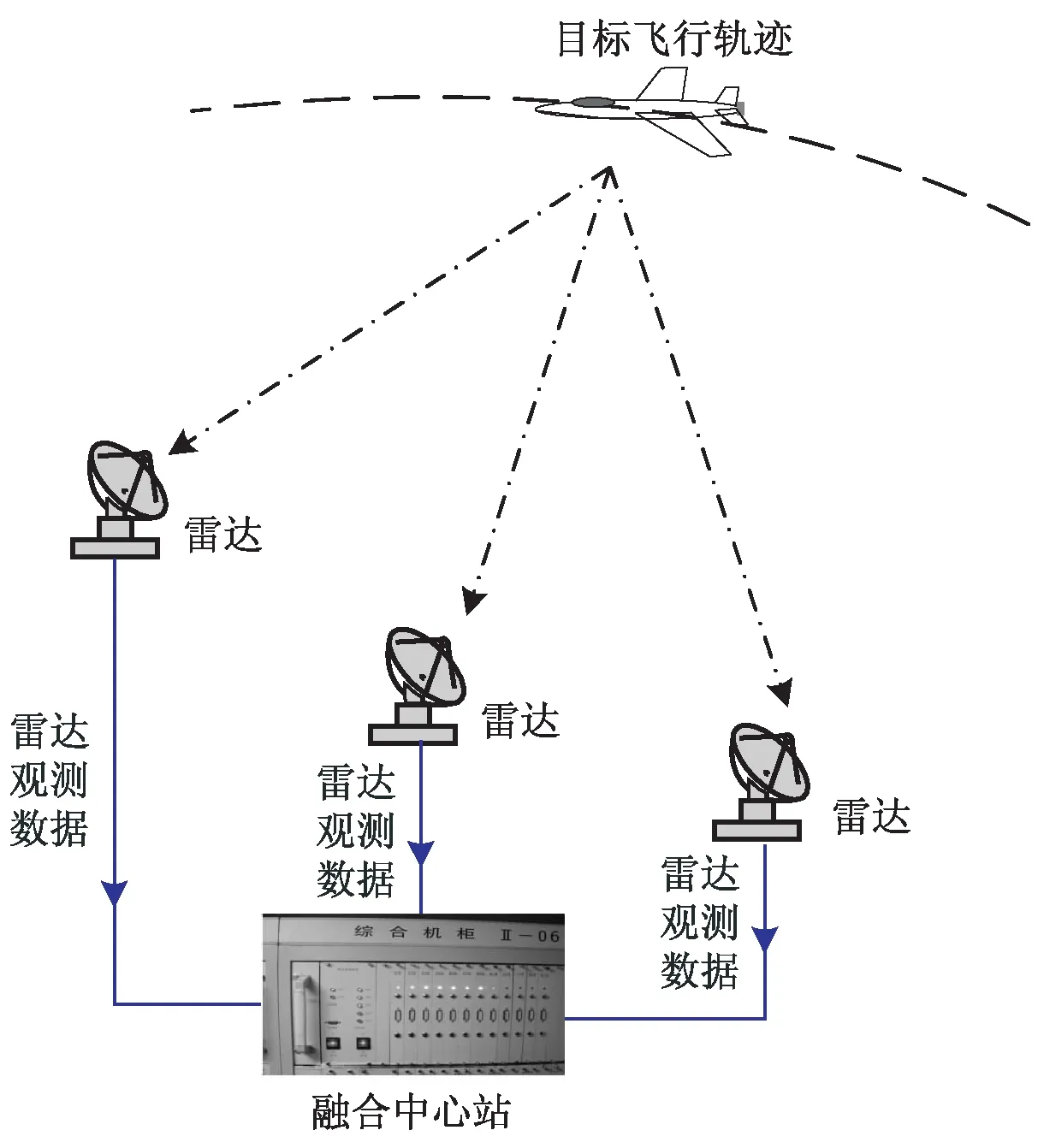
图1 多雷达融合系统
为完成多雷达融合系统建模,首先,对整个仿真场景进行设定,包括雷达位置与参数、目标飞行轨迹、融合中心融合方式设定等;其次,对单部雷达的探测过程进行仿真,包括接收信号生成、单雷达信号处理和单雷达数据处理;最后,对融合中心站的数据融合处理过程进行仿真,包括多雷达时空配准、多雷达点迹融合、多雷达航迹融合仿真等。
2 系统总体设计
2.1 系统总体框架设计
基于MATLAB GUI的图像处理演示系统利用MATLAB提供的GUI平台来设计人机交互的图形用户界面,集成了雷达系统及多雷达信息融合理论教学和实验教学的主要功能:场景想定、回波信号生成、单雷达系统仿真及多雷达数据融合仿真。各模块拆分出对应子模块,在相应子界面中展示,通过修改界面中控件的参数,编写回调函数,实现主界面与子界面间的切换及处理功能的增添或修改。
设计GUI用户界面一般分为五步:
①明确系统所要实现的主要功能,应该具有哪些模块;
②绘出基本的用户界面草图;
③根据最终确定的方案,利用MATLAB GUI制作用户操作界面;
④通过在界面中添加控件,实现演示内容的参数修改和函数调用;
⑤进行回调函数的编写,实现界面之间的切换和调用操作。
该演示系统总体设计框架如图2所示。

图2 多雷达信息融合教研系统设计框架
2.2 系统界面设计
该系统包括场景想定、回波信号生成、单雷达系统仿真及多雷达数据融合等功能,系统主界面如图3所示。

图3 多雷达信息融合教研系统主界面
3 功能模块的设计与实现
该系统包含四个方面的雷达处理功能,每一个功能都对应一个子界面而且都拥有独立的用户可视化窗口。学生和教师通过登陆界面进入系统后点击进入系统即可到达主界面的模块集成区,点击对应模块即可到达相应的设置界面。同时,每个模块均包含后台算法、评分体系及处理结果导出等功能,帮助学生掌握仿真全过程的合理性,支持离线分析。下面介绍各模块的设计方法及界面效果。
3.1 场景想定
场景想定是整个仿真系统的首要模块,其核心是对用户仿真需求和仿真任务的模型化描述。具体而言,需要完成仿真场景设定、起止时间及仿真时间步长设定、雷达位置、体制、工作模式、工作参数、初始状态、目标类型、航迹、杂波类型、分布区域、主要观测参数、干扰机类型、干扰类型、运动轨迹等内容的设置。界面设计如图4所示。

图4 场景想定功能界面
3.2 接收信号生成
接收信号生成是将场景想定的结果转化为雷达接收信号的重要环节。系统需要根据时序、环境、目标、干扰等状态综合产生每个雷达节点收到的信号。在产生时,要注意传播条件、干扰平台动态性等带来的回波信号的时变特性。
3.3 单雷达处理仿真
单雷达处理仿真包括单雷达信号处理仿真和单雷达数据处理仿真两个部分。
3.3.1 单雷达信号处理仿真
单雷达信号处理仿真是对雷达信号处理机的仿真处理,在本系统中,信号处理主要针对脉冲式雷达进行仿真,包含单个脉冲重复周期接收信号的脉冲压缩处理、多脉冲间的MTI/MTD/非相参积累、动平台对应的PD/STAP、目标检测、点迹凝聚,以及主要的目标距离、角度、速度估计方法。上述具体功能均可在界面上设置对应的参数及显示相应结果。
单雷达信号处理仿真界面设计如图5所示,并给出了部分信号处理过程的仿真结果。其中,图5(a)是脉冲压缩后的信号,可以看到由于地杂波的存在,近距离杂波较强,最强可达1.6×10-3,目标在脉压后被淹没。图5(b)是利用MTI进行杂波对消后的信号,可以看到杂波对消后,背景噪声平均下降到0.7×10-6左右,但由于信噪比较低,目标凸显并不明显,还无法完成目标检测。图5(c)是利用MTD进行脉间相参积累后的信号,可以看到脉间积累后,信噪比得到大幅提高,目标凸显,可进一步进行目标检测。图5(d)是利用CFAR进行恒虚警检测后的结果,可以看到雷达共检测到三个目标。

(a)脉冲压缩结果
3.3.2 单雷达数据处理仿真
单雷达数据处理仿真是支撑多雷达数据融合的基础,在信号处理之后进行,通过对目标量测信息进行跟踪滤波,生成目标航迹信息。数据处理主要分为航迹起始、航迹关联、航迹滤波与预测、航迹终结这几个阶段。
雷达量测数据进入跟踪波门内才是有效量测,与现有航迹进行点迹-航迹关联,关联成功的点迹用于该条航迹的滤波与预测,再根据预测值重设下一时刻的跟踪波门。对于未关联成功的点迹,则进行航迹起始,存储为一条新航迹。若一条航迹多次未关联上新点迹,则该航迹终结。其中,最为核心的是目标跟踪滤波算法包括EKF滤波、粒子滤波、IMM滤波算法等。各雷达数据处理仿真参数可在界面上设置对应的参数,并显示相应滤波结果。界面设计如图6所示。

图6 单雷达数据处理功能界面
3.4 多雷达信息融合仿真
多雷达信息融合仿真包括点迹融合仿真和航迹融合仿真。在进行数据信息融合之前,首先需要对各雷达站量测或航迹信息进行时间对齐和空间配准。其中,时间对齐一般采用内插外推的方法,空间配准方法是通过一系列的坐标变换来实现各雷达站点航迹信息与误差从量测坐标系变换至融合中心统一直角坐标系下。
3.4.1 点迹融合仿真
点迹融合是对雷达站的量测信息进行关联,并将关联成功的点迹进行融合,以提高目标定位精度。多雷达点迹融合功能界面如图7所示,可对点迹融合时刻、选择的点迹关联算法和关联门限进行设置,并显示出点迹融合前后的结果图和融合后目标定位精度。

图7 多雷达点迹融合功能界面
点迹关联算法包括最近邻关联算法、基于马氏距离的关联算法、位置速度联合关联算法等[4,17]。以图7中所选择基于马氏距离的关联算法为例进行说明。设雷达n的观测点迹序列为Zn。转换到统一直角坐标系后,量测误差dZn近似服从零均值的高斯分布,即dZn~N(0,Pn),其中Pn为各雷达在坐标转换后的误差协方差矩阵,假设各雷达的测量误差是独立的。
设H0和H1为下列事件:
H0:Zn和Zm为同一目标的点迹;
H1:Zn和Zm为不同目标的点迹。
点迹关联问题转换为了假设检验问题。选择两雷达量测值之间的马氏距离作为假设检验量,马氏距离定义为:
(1)
其中,∑nm=E[(dZn-dZm)(dZn-dZm)T]=Pn+Pm。若H0成立,马氏距离dnm服从χ2分布。
据此可对H0进行假设检验,那么点迹关联检验为:
(2)

关联成功的各单雷达点迹均对应同一个目标,融合中心站通过对成功关联的点迹进行融合处理,可以提高目标的量测精度,点迹融合的算法需要根据各点迹的量测精度进行加权得到。设对应同一目标的各雷达站点迹为Zk,对应的协方差矩阵分别为Rk,k=1,2,…,K,K为检测到该目标雷达站的个数。通过加权的方式得到的融合后的点迹数据FZ和协方差矩阵FR为:
(3)
(4)
通过点迹融合后,目标量测精度比单部雷达站的量测结果更加精确,在图7中可以看到融合后的点迹信息,并给出融合后的目标定位精度,由GDOP描述(以三坐标雷达为例):
(5)
即为根号下协方差矩阵FR的对角元素求和。
3.4.2 航迹融合仿真
航迹融合是对雷达站的目标航迹进行关联,并将关联成功的点航迹进行融合,以提高航迹跟踪精度。多雷达航迹融合功能界面如图8所示,可对航迹融合的开始和结束时刻、选择的航迹关联算法和关联门限进行设置,并显示出航迹融合前后的结果图。
航迹关联算法包括K近邻域算法、统计双门限算法、贯序航迹关联算法等[4,17]。以图8中所选择序贯航迹关联算法为例进行说明。

图8 多雷达航迹融合功能界面
UA={1,2,…,nA},UB={1,2,…,nB}
(6)
令:
(7)
(8)

设H0和H1为下列事件:


如此便将航迹关联问题转换为了假设检验问题。可构造检验统计量:
(9)
(10)
对于关联成功的航迹需要进行融合处理来提高跟踪精度,采用在系统统一坐标系下滤波点迹串行合并后再滤波的方法。关联航迹串行合并后,在统一坐标系下对其进行Kalman或扩展Kalman滤波。与观测点迹的滤波类似,稍有不同的是,滤波点迹是在统一直角坐标系下描述的,它不仅包含位置信息,还包含速度信息,其滤波协方差相当于量测协方差矩阵。串行合并后滤波相当于提高目标数据率,并再次平滑,会大大提高融合航迹的精度。
4 结束语
该文介绍了一套基于可视化界面的多雷达信息融合教研系统及其设计思路,该系统包含了场景想定、回波信号生成、单雷达系统仿真及多雷达数据融合等功能,通过基于MATLAB的图形用户界面完成用户设置、参数显示、波形显示等功能,能够为用户提供完整的单雷达及过雷达融合的直观仿真分析。同时,整个软件架构灵活,秉承了高内聚、低耦合的组件化思想,便于增加功能,进行二次开发。软件可应用于理论教学的课内演示、实验课实际操作及相关科研工作的仿真与评估工作。
猜你喜欢
中学物理·高中(2021年3期)2021-06-06 07:25:18
青年歌声(2019年12期)2019-12-17 06:32:32
当代陕西(2019年15期)2019-09-02 01:52:00
火控雷达技术(2019年1期)2019-04-11 06:35:00
电子技术与软件工程(2018年9期)2018-02-25 06:21:08
学苑创造·A版(2018年11期)2018-02-01 06:29:20
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
中国科技博览(2017年31期)2017-09-20 07:56:08
读者(2017年5期)2017-02-15 18:04:18
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52