
CASIO fx-5800P在工程测量导线计算中的应用
2023-03-25 09:02张蕾
河南科技 2023年5期
张 蕾
(兰州现代职业学院,甘肃 兰州 730300)
0 引言
CASIO 公司的fx 系列电子计算器是在二十世纪七十年代末期被引入我国的,是最早被引入我国的便携式程序型电子计算器。其一进入我国,就被测量工作者应用到测量计算工作中。在这种便携式程序型电子计算器被引入之前,我国的测量计算工作主要依靠繁杂的计算表(如水准测量计算表、导线计算表及各种曲线测设表等),再用手工作业的方式来完成计算工作,这种计算方式不但费时费力,还容易出现错误。如果使用笔记本电脑,其不仅对外界的环境要求较高,且不便携带。而如果使用掌上电脑,虽便于携带,但其价格偏高,且不方便计算。这种可放进口袋、跟手机大小一样的可程序型计算器能有效解决上述问题[1]。CASIO fx计算器是利用编制好的程序,只要输入已知数据,其就能马上显示出精确计算结果的。通过将这种便携式电子计算器引入到测量工作中,使测量计算工作发生极大的变化,大大加快计算速度,且有效提高计算的精度。CASIO fx-5800P 可程序电子计算器在日常测量工作中具有广阔的应用前景。
导线测量作为平面控制网的主要形式,主要用于道路工程测量、建筑工程测量等控制测量中,主要有闭合导线、附合导线和支导线三种形式。由于支导线缺乏检核条件,往往用于往返测量[2]。本研究对闭合导线和附合导线进行研究,从导线的外业出发,利用导线点的计算公式来阐述计算过程,通过程序的编辑和运行,得到平差后导线点的坐标。
1 闭合导线简易平差
闭合导线如图1 所示。已知起始边12 的坐标方位角为α0及起点1的坐标为(X0,Y0)。观测各转折角度(内角)β及各边水平距离D,从而平差计算出各导线点的坐标。

图1 闭合导线
1.1 公式推导
闭合导线角度闭合差的计算公式见式(1)。
式中:β为观测角值;n为观测角个数。
闭合导线角度改正数的计算公式见式(2)。
闭合导线改正后的角度的计算公式见式(3)。
闭合导线方位角闭差的计算公式见式(4)。
式中:当β为左角时取“+”,当β为右角时取“-”;αi+1为后面一条直线的方位角;αi为前面一条直线的方位角;βi为两直线间的夹角。
闭合导线横纵坐标增量的计算公式见式(5)、式(6)。
式中:Di为第i条边的水平距离。
闭合导线横纵坐标增量闭合差的计算公式见式(7)、式(8)。
式中:ΔX为横坐标增量;ΔY为纵坐标增量。
闭合导线全长绝对闭合差的计算公式见式(9)。
闭合导线全长相对闭合差的计算公式见式(10)。
闭合导线横纵坐标增量改正数的计算公式见式(11)、式(12)。
闭合导线改正后的横纵坐标增量的计算公式见式(13)、式(14)。
闭合导线横纵坐标的计算公式见式(15)、式(16)。
1.2 程序编写
本研究所编写的闭合导线简易平差计算程序如下所示。
1.3 程序运行
在程序运行时,首先,要输入闭合导线的边数BIAN SHU、起始点坐标(X°,Y°)、起始边坐标的方位角α°,并输入导线转折角的符号JIAODU FUHAO(ZUO:1,YOU:- 1) 。当导线转折角为左转折角(按逆时针方向编号进行推算)时输入1,当导线转折角为右转折角(按顺时针方向编号进行推算时)输入-1[3]。其次,从第2点开始,依次输入各导线点的角度JIAO DU,在输入完所有角度数据后,会显示出角度闭合差JIAODU BIHE CHA 的数值。然后,从第1 条边开始,依次输入各导线边的边长(水平距离)JU LI。当输入完所有距离数据后,就会显示出导线全长的相对闭合差K= 1 :****** 。最后,从第2 点开始,依次显示出各导线点的坐标(X、Y)值。
1.4 案例应用
将一个四边形的闭合导线按顺时针方向进行编号,分别编为1、2、3、4。已知12 边的坐标方位角为35°25'00″,1 号点的坐标为(6 500 m,8 500 m),各角度与边长的观测值见表1,用简易平差的方法来计算各导线点的坐标。
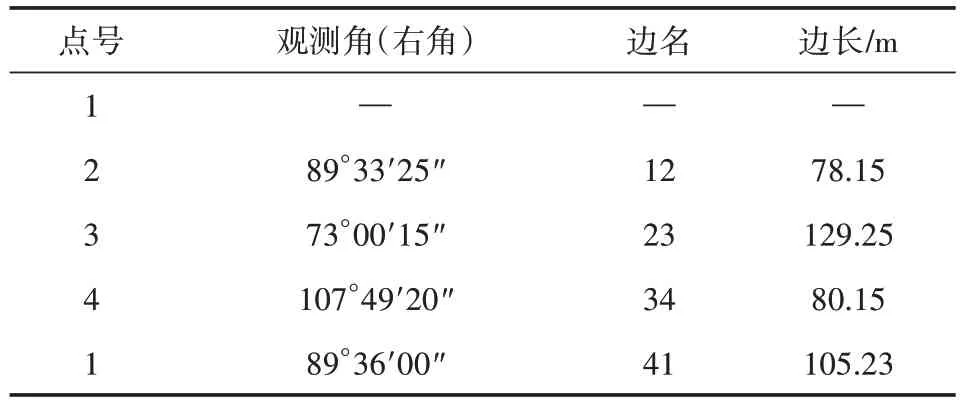
表1 各角度与边长的观测值
开机运行DAOXIAN BIHE 程序,首先,输入边长数量BIANSHU=4,输入1 号点(起始点)的坐标,即X0=6 500 m、Y0=8 500 m,和12边(起始边)的坐标方位角α°=35°25'00″,并输入转角符号JIAODU FUHAO(ZUO:1,YOU:-1)=-1。其次,依次输入四 个 水平角度,即JIAODU=89°33'25″、JIAODU=73°00'15″、JIAODU = 107°49'20″、JIAODU =89°36'00″。此时,会显示角度闭合差JIAODU BIHE CHA=-0°1'0″。然后,从第1条边开始,依次输入四条边的水平距离JULI=78.15 m、JULI=129.25 m、JULI=80.15 m、JULI=105.23 m。最后,已知的数据输入完毕,计算后显示导线全长的相对闭合差K=1:10 363.000,并从2 号点开始,依次显示2、3、4、1各导线点的坐标,即(6 563.696 m,8 545.292 m)、(6 488.000m,8650.053m)、(6439.602m,8586.174m)、(6 500.000 m,8 500.000 m)。
2 附合导线简易平差
附合导线如图2 所示,已知起始边AB 的坐标方位角为α0,起点B 的坐标为(X0,Y0),终边CD 的坐标方位角为αn,终点C 的坐标为(Xn,Yn)。共观测了n条边长D和n+1个角度β。

图2 附合导线
2.1 公式推导
附合导线简易平差的计算公式与闭合导线简易平差的计算公式基本相同,不同之处在于角度闭合差与坐标增量闭合差的计算方法。
附合导线角度闭合差的计算公式见式(17)。
注:当β为左角时取“+”,当β为右角时取“-”。
附合导线横纵坐标增量闭合差的计算公式见式(18)、式(19)。
2.2 程序编写
本研究所编写的附合导线简易平差计算程序如下所示。
2.3 程序运行
在程序运行时,首先,输入附合导线的边数BIAN SHU、起始点坐标(X°,Y°)、终点坐标(Xn,Yn)、起始边的坐标方位角α°、终边的坐标方位角αn,并输入导线转折角的符号JIAODU FUHAO(ZUO:1,YOU:-1)。当输入的导线转折角为左转折角时输入1,当输入的导线转折角为右转折角输入-1。其次,从第1 点开始,依次输入各导线点的角度JIAO DU,在输入完所有角度数据后,就会显示出角度闭合差JIAODU BIHE CHA 的数值,然后,从第1条边开始,依次输入各导线边的边长(水平距离)JU LI,输入完所有距离数据后,就会显示出导线全长的相对闭合差K=1:******,最后,从第1 点开始,依次显示出各导线点的坐标值。
2.4 案例应用
一个条附合导线有4 条边,观测路线左角。已知起始边AB的坐标方位角为237°55'20″,起始点B的坐标为(5 534.570 m,4 252.460 m),终边CD的坐标方位角为138°27'08″,终点C的坐标为(5 204.380 m,4 543.750 m),各角度与边长的观测值详见表2,用简易平差法来计算各导线点的坐标。

表2 各角度与边长的观测值
开机运行DAOXIAN FUHE程序。首先,输入边长数量BIANSHU=4,输入起始点B 的坐标(5 534.570 m,4 252.460 m)和 终 点C 的 坐 标(5 204.380 m,4 543.750 m)。接着输入起始边AB 的已知坐标方位角α°=237°55'20″,输入终边CD的已知坐标方位角αn=138°27'08″,再输入转角符号JIAODU FUHAO(ZUO:1,YOU:-1)=1。其次,依次输入五个水平角度JIAODU=173°25'10″、JIAODU=77°23'20″、JIAODU=158° 10'45″、JIAODU=193° 35'15″、JIAODU=197°58'05″。此时,显示的角度闭合差JIAODU BIHE CHA=0°0'47″,然后,从第1 条边开始,依次输入四条边的水平距离JULI=160.590 m,JULI=171.860 m,JULI=161.510 m,JULI=148.660 m。最后,已知的数据输入完毕,计算后会显示出导线全长的相对闭合差K=1:16 884.000,并从2号点开始依次显示2、3、4、1 各导线点的坐标,即(5 434.254 m,4 127.055 m)、(5 326.746 m,4 261.124 m)、(5 279.796 m,4 415.650 m)、(5 204.380 m,4 543.750 m)。
在进行导线内业计算时,如果使用公式进行手工计算,不仅计算公式多、步骤复杂,且在计算过程中容易出现错误。而利用CASIO fx-5800P 编好的程序进行导线计算时,只要根据提示信息输入已知数据和观测数据,就可得到导线点的坐标。从上面案例分析可知,通过闭合导线和附合导线两种导线形式计算得到的角度闭合差、导线全长相对闭合差均满足《工程测量标准》[4]测量的精度要求。
3 结语
本研究借助CASIO fx-5800P 进行导线测量平差,在采集完施工现场外业数据后,1 名测量员约15 min 就可快速、高效、准确地计算出未知点的坐标和成果精度指标[5],在测量工作中使用CASIO fx-5800P 型计算器既省时又省力,不仅能保证数据的准确性,且能保证精度的可靠性。CASIO fx-5800P型计算器具有较大的内存,且其所采用的程序编写语言是类结构化的BASIC 语言[6]。这种价格低、体积小、重量轻、便于随身携带的可程序型计算器,使日常测量计算工作实现程序化计算,能在测量计算工作中发挥重要作用,使工作效率进一步提高,本研究的计算方法对广大测量人员是有益的。
猜你喜欢
河南科技(2023年1期)2023-02-11
Chinese Physics B(2022年5期)2022-05-16
小学生学习指导(中年级)(2021年10期)2021-11-01
黑龙江交通科技(2020年5期)2020-01-13
青少年日记·小学生版(2019年2期)2019-09-02
有机氟工业(2019年2期)2019-08-12
数学小灵通·3-4年级(2017年12期)2018-01-23
读写算(中)(2015年10期)2015-11-07
读写算·小学中年级版(2015年10期)2015-10-20
小天使·二年级语数英综合(2015年8期)2015-07-06
