机器人结直肠癌根治术近期疗效及术者主观感受对比研究
2023-03-21 10:06谷文龙狄茂军刘焱伟惠远见谭华勇
中国医学工程 2023年2期
谷文龙,狄茂军,刘焱伟,惠远见,谭华勇
( 1.锦州医科大学十堰市太和医院 研究生培养基地,湖北 十堰 442000;2.湖北医药学院附属太和医院胃肠外科,湖北 十堰 442000 )
结直肠癌是最常见的消化道恶性肿瘤之一,据统计,结直肠癌的发病率排名第三,死亡率排名第二位[1],自1993年我国开展首例腹腔镜结肠癌与直肠癌手术以来,腹腔镜结直肠癌手术技术在结直肠外科领域已逐渐得到广泛认可与普及[1-2],其手术时间及术后并发症也越来越少,成为结直肠癌的常规手术方法。2001年机器人手术系统首次被应用于结直肠良性肿瘤的治疗,经过手术系统的不断更新,以其在狭小空间可操作性强、机械手臂灵活性大及手术视野三维高清等优势将结直肠手术的精度提升到新高度[3]。随着机器人手术的兴起,大多数研究多针对其治疗效果,在术者主观感受方面调查的较少。2020年9月本科开始使用第4代达芬奇机器人手术系统进行结直肠癌手术,取得了较好的治疗效果,本研究收集2020年9月至2022年2月实施机器人和腹腔镜手术的结直肠癌患者的临床资料及术者主观感受进行回顾性分析,为该技术的应用推广提供参考。
1 资料与方法
1.1 一般资料
收集2020年9月至2022年2月十堰市太和医院胃肠外科行机器人结直肠癌根治术与腹腔镜结直肠癌根治术患者的临床资料,按照纳入及排除标准,共收集机器人组43例,腹腔镜组48例。机器人组男18例,女25例;平均年龄(62.22±10.42)岁;平均体质量指数(BMI)(22.58±2.58)kg/m²。腹腔镜组男27例,女21例;平均年龄(63.05±11.84)岁;平均 BMI(23.07±2.20)kg/m²。
1.2 选择标准
1.2.1 纳入标准 ①术前经肠镜取病理确诊为原发结直肠恶性肿瘤患者;②术前均未行新辅助治疗,经CT、MRI或PET-CT检查明确无肺、肝脏及其他远处部位转移征象;③患者既往无其他恶性肿瘤病史,有腹部手术史者术中未见明显粘连;④术中探查肿瘤未侵犯周围器官;⑤能够获得完整的临床病例资料。
1.2.2 排除标准 ①术前或术后病理学诊断良性腺瘤或临床分期为Ⅳ期者;②因肿瘤导致的肠梗阻、出血等需要急诊开腹手术治疗的患者;③术前通过影像学评估患者临床分期已有肝、肺等脏器转移的患者;④合并有其他脏器肿瘤者。
1.3 方法
机器人结直肠癌患者手术方法和步骤均遵循机器人结直肠癌手术中国专家共识(2020版)[4],腹腔镜结直肠癌根治术手术步骤与机器人手术相同,无论机器人组还是腹腔镜手术组均严格遵循肿瘤根治原则。
主观调查问卷内容包括:①双眼聚焦差异度:更改眼睛的焦点以观看不同距离上的物体,眼睛自动调整和聚散感觉差异;②视觉纵深感:画面中表现出的空间深度;③像素稳定性;④视野、视角操控协调度;⑤颜色分辨率;⑥画面快速更新率:荧光屏上画面更新的速度;⑦机体疲劳度:主要评估术者躯体劳累程度;⑧空间定向感:手术时中正确辨识术中方向的知觉反应;⑨双眼疲劳度:术中与术后手术医师眼部酸胀不适、灼热感、流泪等感觉。上诉问卷结果均由主刀医师及第一助手手术后填写李克特式量表五点法。
1.4 统计学方法
应用SPSS 25.0统计软件进行分析。正态分布的计量资料以均数±标准差(±s)表示,采用t检验,偏态分布的以中位数和四分位数间距M(P25,P75)表示,采用非参数秩和检验;计数资料以百分率(%)表示,采用χ²或Fisher确切概率法检验。P<0.05为差异有统计学意义。
2 结果
2.1 两组基本资料比较
两组患者在年龄、性别、身高、BMI、肿瘤最大径比较差异均无统计学意义(P>0.05),临床资料具有可比性。见表1。
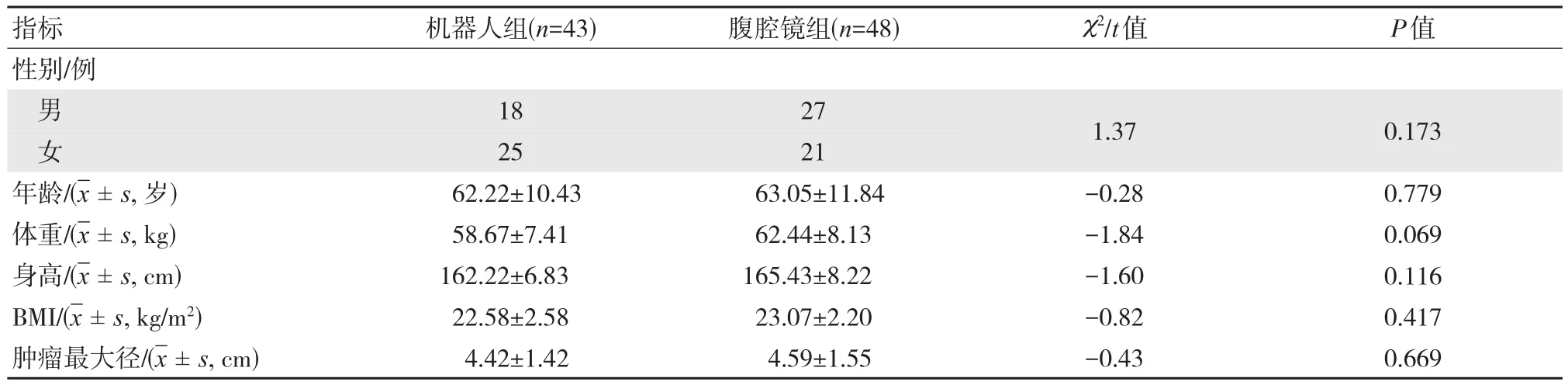
表1 两组患者基本资料比较
2.2 两组患者的手术情况与病理结果比较
两组均无中转开腹病例,机器人组手术时间长于腹腔镜组,手术费用及住院总费用均高于腹腔镜组,差异有统计学意义(P<0.05);两组术中估计出血量比较差异无统计学意义(P>0.05)。两组术后病理结果T、N分期、分化程度、癌类型、清扫总淋巴结数目及阳性淋巴结数目比较差异均无统计学意义(P>0.05)。见表2。
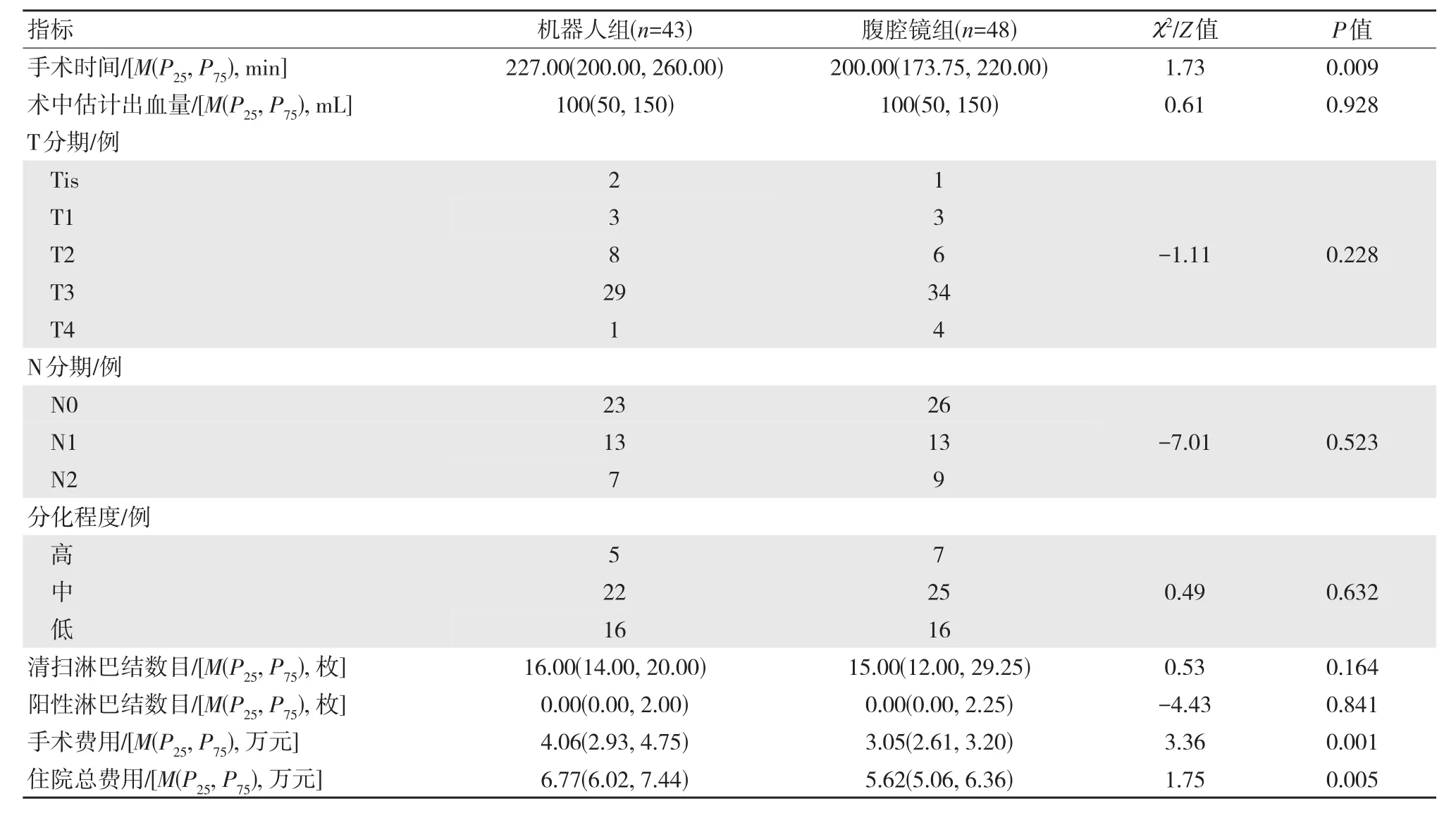
表2 两组患者的手术情况与病理结果比较
2.3 两组术后恢复情况及并发症比较
两组术后拔胃管、拔引流管、拔尿管时间比较差异无统计学意义(P>0.05),术后进流质饮食、首次排气时间、首次下床时间及术后住院时间比较差异无统计学意义(P>0.05);机器人组中15例发生并发症,其中腹腔感染2例,腹胀3例,排尿困难3例,肠梗阻、淋巴漏、肺部感染、切口感染、脂肪液化、吻合口瘘、循环系统并发症各1例,肠梗阻患者因保守治疗6天症状无改善行开腹探查+小肠切开减压+小肠部分切除+回肠造口术,术后恢复良好后出院,余并发症患者均经保守治疗后治愈出院。腹腔镜组中12例发生并发症,其中腹胀3例,吻合口瘘2例,排尿困难2例,肠梗阻、胃瘫、肺部感染、切口感染、循环系统并发症各1例,均经保守治疗后治愈出院,两组结果比较差异无统计学意义(P>0.05)。见表3。
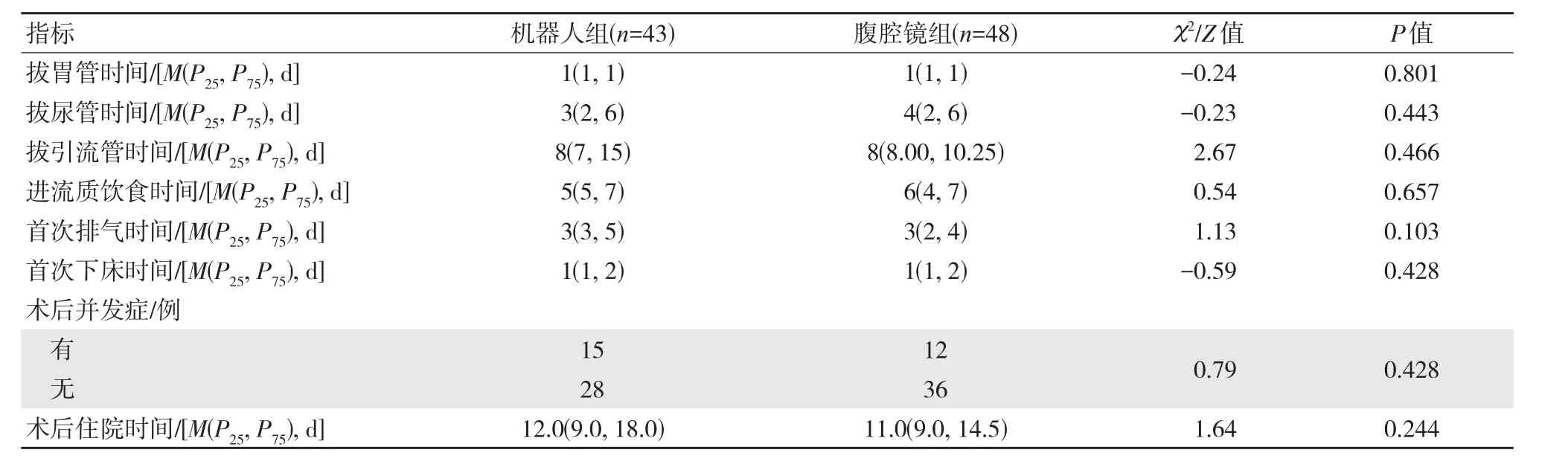
表3 两组术后恢复情况及并发症比较
2.4 调查问卷结果
两组主观感受评分,机器人组主刀医生的视野、视角操控协调度、双眼聚焦差异度、视觉纵深感、空间定向感以及机体疲劳度分别为(4.65±0.49) 分、(4.65±0.49) 分、(4.78±0.42) 分、(4.74±0.45)分和(4.83±0.39)分,腹腔镜组分别为(4.10±0.30)分、(4.21±0.42)分、(4.05±0.38) 分、(4.17±0.49) 分和 (4.07±0.56) 分,比较差异有统计学意义(P<0.05);机器人组第一助手的双眼聚焦差异度、视觉纵深感、空间定向感以及机体疲劳度分别为(4.83±0.39)分、(4.96±0.21) 分 、(4.91±0.29) 分 和 (5.00±0.00)分,腹腔镜组分别为(4.31±0.52)分、(4.24±0.43) 分 、(4.19±0.40) 分 和 (4.38±0.49)分,比较差异有统计学意义(P<0.05)。见表4、表5。
表4 两组主刀医师主观感受评分比较 (±s, 分)
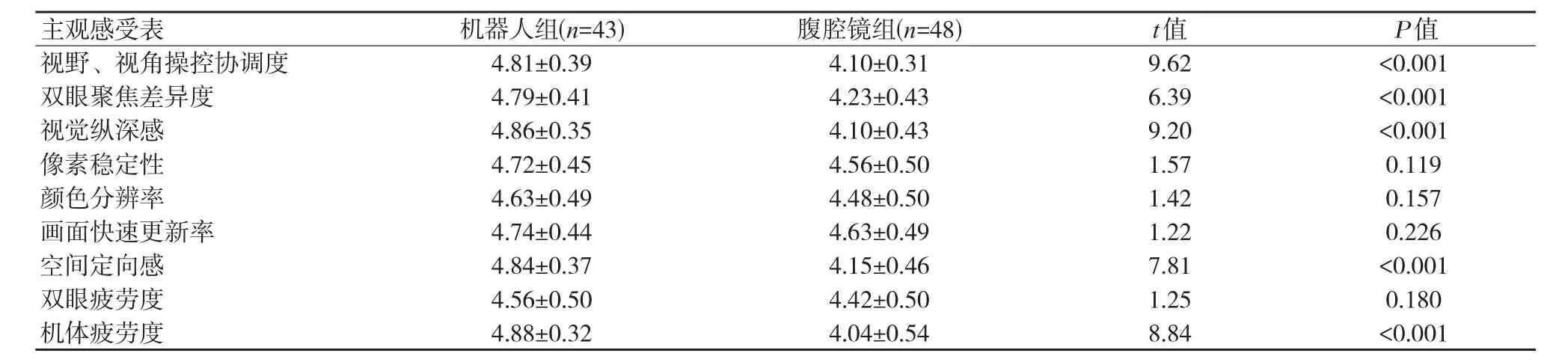
表4 两组主刀医师主观感受评分比较 (±s, 分)
主观感受表视野、视角操控协调度双眼聚焦差异度视觉纵深感像素稳定性颜色分辨率画面快速更新率空间定向感双眼疲劳度机体疲劳度机器人组(n=43)4.81±0.39 4.79±0.41 4.86±0.35 4.72±0.45 4.63±0.49 4.74±0.44 4.84±0.37 4.56±0.50 4.88±0.32腹腔镜组(n=48)4.10±0.31 4.23±0.43 4.10±0.43 4.56±0.50 4.48±0.50 4.63±0.49 4.15±0.46 4.42±0.50 4.04±0.54 t值9.62 6.39 9.20 1.57 1.42 1.22 7.81 1.25 8.84 P值<0.001<0.001<0.001 0.119 0.157 0.226<0.001 0.180<0.001
表5 两组第一助手主观感受评分比较 (±s, 分)
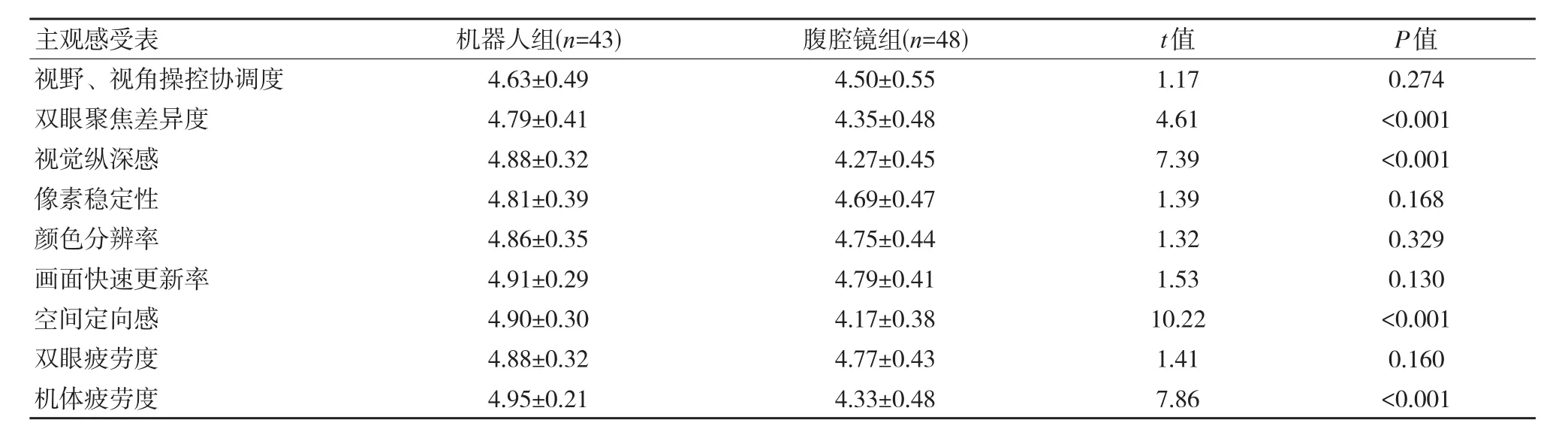
表5 两组第一助手主观感受评分比较 (±s, 分)
主观感受表视野、视角操控协调度双眼聚焦差异度视觉纵深感像素稳定性颜色分辨率画面快速更新率空间定向感双眼疲劳度机体疲劳度机器人组(n=43)4.63±0.49 4.79±0.41 4.88±0.32 4.81±0.39 4.86±0.35 4.91±0.29 4.90±0.30 4.88±0.32 4.95±0.21腹腔镜组(n=48)4.50±0.55 4.35±0.48 4.27±0.45 4.69±0.47 4.75±0.44 4.79±0.41 4.17±0.38 4.77±0.43 4.33±0.48 t值1.17 4.61 7.39 1.39 1.32 1.53 10.22 1.41 7.86 P值0.274<0.001<0.001 0.168 0.329 0.130<0.001 0.160<0.001
3 讨论
随着微创外科临床应用研究的逐步深入,腹腔镜结直肠癌手术的疗效已被广泛认可,结直肠癌患者在术式选择方面更倾向于微创小、术后恢复快的腹腔镜手术,自2002年首次应用机器人手术系统完成了结肠良性疾病手术以来[5],机器人结直肠手术即成热点也逐步发展,机器人手术设备允许控制台上的外科医生操作远程控制的机械臂实施手术,不仅具有超高清的三维立体成像,还可以过滤手部震颤,提高了操作灵活性,更加符合人体工程学[6-7]。
从手术结果来看:机器人组手术时间明显长于腹腔镜组(P<0.05),笔者认为这与本院刚开展使用达芬奇手术系统有关,本科室于2020年9月开始施行达芬奇机器人系统,样本量较小且熟练度待提升,且研究表明[8]机器人手术学习曲线的初始阶段所需病例数至少为25~44例,还有研究结果显示机器人与腹腔镜手术时间对比无显著差异[9-10],这仍需积累经验及术者相互配合来缩短手术时间;在术中估计出血量方面,本研究两组对比无统计学意义,多数研究表明,日趋成熟的机器人结直肠癌手术术中出血量已显著降低,其正是受益于机器人先进的视觉辅助系统和操作平台[11-12]。在手术费用及住院总费用方面,虽已对初步使用达芬奇机器人手术治疗一定数量的病人已经减少相关费用,但费用仍明显高于腹腔镜手术(P<0.05)。目前,在全球范围内接受和推广机器人手术的障碍是高昂的手术费用和系统维护成本[13],且手术样本量较腹腔镜明显不足,使其无法脱颖而出,但也有人认为通过缩短住院时间等措施节省部分费用,在总费用上与传统腹腔镜无统计学差异[14]。
在术后恢复情况方面,两组进流质饮食、首次排气时间、首次下床时间及术后住院时间对比差异无统计学意义(P>0.05),机器人组术后并发症发生率高于腹腔镜组(34.8%>25%),但比较差异无统计学意义(P>0.05),这与大样本研究[15]结果相同,体现了机器人手术的安全性。就其发生率高于腹腔镜组的原因笔者认为:腹腔镜结直肠手术经过近30年的发展及应用日趋完善,而机器人手术方兴未艾,需要更大量样本使手术团队磨合及适应机器人手术系统。相信随着机器人手术在本院的推广,将会缩短手术时间,降低并发症发生率,机器人结直肠癌根治术将会被证明是一种经济有效的方法。
在主观感受方面,机器人组主刀医师及第一助手均认为机器人手术系统提供了更好的双眼聚焦差异度、视觉纵深感、空间定向感,且术后机体疲劳度更低(P<0.05),而在视野、视角操控协调度方面,主刀医师认为机器人系统的效果优于腹腔镜组,在手术时操控协调更佳,而第一助手没有明显差别;两组像素稳定性、颜色分辨率比较无明显差异,在双眼疲劳度方面,有研究认为[16-17]机器人手术系统双眼疲劳感、眩晕略次于2D腹腔镜,这可能与问卷样本量小及回顾偏倚因素相关,需行更进一步的前瞻性主观感受问卷验证。如此优势有助于术者在结直肠癌手术过程中更加效率的完成解剖及吻合等操作,减少手术时间,保证手术质量。
综上所述,笔者认为机器人结直肠癌根治术近期疗效安全可行,其良好的空间立体感、更低的机体疲劳度等优势可以帮助手术医师的更有效率的完成手术,相信机器人微创手术具有更加广阔的前景。
猜你喜欢
中共云南省委党校学报(2022年1期)2022-04-26
小学生优秀作文(低年级)(2020年4期)2020-07-24
法律方法(2018年2期)2018-07-13
中国医药指南(2017年3期)2017-11-13
西南军医(2016年3期)2016-01-23
中国继续医学教育(2015年6期)2016-01-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
中国当代医药(2015年30期)2015-03-01