基于无人机巡检的光伏面板缺陷识别方法
2023-03-20 12:25:18韩虎虎祁鑫王鹤飞李惠翔齐吉祥
电子设计工程 2023年6期
韩虎虎,祁鑫,王鹤飞,李惠翔,齐吉祥
(国电四子王旗光伏发电有限公司安全生产部,内蒙古乌兰察布 011800)
在无人机巡检过程中,为了保证所采集到的图像的真实性,需要对输电线路及杆塔结构进行近距离拍摄。由于输电网络环境中存在较强的电磁场作用,所以在传输过程中电信号并不能保持绝对稳定的连接状态。对于光伏型发电网络而言,无人机巡检线路的设置,需要同时考虑基站建设、双向数据传输等多项应用性问题[1]。一般情况下,地面基站输出的电信号参量可在光伏面板中暂时寄存,当电量主机接收到动作指令或飞行控制信息时,这些已存储的电信号会根据电感元件所处的实时位置进行传输,且由于面板结构体维稳作用的存在,无人机巡检项目同时具备抗干扰性强、传输速率快等多项应用优势。
光伏面板是实现由太阳能到电能转化的应用型光伏发电组件,其质量水平的好坏直接影响电信号传输速率及用电行为安全。通常情况下,光伏面板表面的缺陷具有较强隐蔽性,在实际应用过程中,极易出现漏检或错检现象,若不能及时发现并解决这些问题,不但会造成传输电能迭代步数的快速增大,也有可能引发一系列的电能过量损失行为。传统YOLOv2 网络型诊断模型为解决上述问题,对电信号特征进行实时提取,再借助组合核函数,完成对光伏面板缺陷问题的识别与处理[2]。然而此方法对于能量迭代步数上升行为的抑制能力有限,并不能较好地解决光伏发电过程中的交叉熵过量损失问题,为避免上述情况的发生,提出基于无人机巡检的光伏面板缺陷识别方法。
1 光伏面板缺陷量提取
基于无人机巡检的光伏面板缺陷量提取由适宜机型选择、巡检路径规划、维度灾难系数计算三个处理环节组成,具体操作方法如下。
1.1 适宜机型选择
适合执行光伏面板缺陷识别任务的巡检无人机主要包含固定翼无人机、多旋翼无人机两种型号,其具体应用优缺点如下。
1)固定翼无人机:该类型巡检无人机的续航时间较长,在大电量荷载条件下,具有极快的飞行速度,能够同时搭载多种巡检设备。但由于整个飞行过程中,机体结构始终采取自主控制的应用形式,因此并不能悬停于某个固定的光伏面板结构上端[3-4]。该类型无人机设备只能以俯视角度拍摄电网视频及图像,且由于其飞行速度较快,拍摄点与光伏面板之间的物理距离相对较远,所以最终采集到的视频与图像都只能反映出输电线路及输电杆塔的基本概况。
2)多旋翼无人机:该类型巡检无人机在飞行过程中必须附带陀螺增稳仪结构,且在人工遥控作用的影响下,无人机可精准悬停于某个固定光伏面板结构上端,且机体灵活性较强,只能在小范围电网巡检区域中执行高效率飞行任务[5-6]。但机体所能承载的重量值极小,因此只能以锂电池作为唯一的动力支持,故而在实际飞行过程中,其续航时间相对较短。
1.2 巡检路径规划
采用无人机进行光伏面板缺陷识别巡检时,其规划路径受到无人机性能、巡检任务等多项约束条件的共同影响[7-8]。R表示无人机巡检区域的规划半径,在点电荷带电量均值为qˉ、光伏输电强度为g、电工强度为W的情况下,可将规划半径R定义为:
在巡检过程中,规定vmax代表无人机最大航速,假设一条航迹中共包含m个巡检节点,在满足上述物理量条件的情况下,整条巡检航迹的总航程p需满足:
式中,e表示起始巡检节点系数,Ie表示无人机起始巡检节点坐标,Im表示无人机巡检的终点坐标。
无人机巡检路径规划就是在电网空间中寻找符合光伏面板缺陷识别条件的飞行路径,可以借助一系列节点确定最终的巡检路径长度,且任意两个相邻节点之间只能依靠线段进行连接。
1.3 维度灾难系数
针对维度灾难无人机巡检任务的最主要表现缺点,在光伏面板缺陷识别过程中,若不能准确计算维度灾难系数值,不但会增大光伏面板的缺陷表现强度,也有可能导致错误识别行为的出现。实际上,随着巡检路径规划特征的逐渐明朗,维度灾难系数指标会呈现明显的阶段性分布态势,一般来说,上一阶段的最大计算数值可直接作为下一阶段的最小参考值结果[9-10]。规定x1,x2,…,xn分别代表n个不同的无人机巡检任务定义项,在阶段性极大值为εmax、极小值为εmin的情况下,可将维度灾难系数定义为:
其中,表示n个无人机巡检任务定义项的物理均值。若将维度灾难系数看作一项定值参考条件,则可认为无人机飞行器的巡检路径越长,光伏面板缺陷识别结果也就越接近真实表现情况。
2 光伏面板的缺陷识别
2.1 纹理特征
运用无人机巡检方法识别光伏面板缺陷,应以电量感应图像的纹理特征定义作为起始处理环节。在光伏发电网络中,选取面板结构的原始灰度图像,使用数字化定义的方式,标定图像中具有纹理特征的像素对集合。若巡检区域的覆盖范围相对较为广泛,则具备纹理特征的像素对集合数量也相对较多,反之则相对较少[11-12]。随着光伏发电量的不断增大,因电量传输而产生的信号迭代步数值会对纹理特征定义结果产生直接影响,大体上满足电信号传输量越大,电量迭代步数值就越大,此时纹理特征的像素对数量水平也相对更高。设l1、l2代表光伏面板原始灰度图像中的两个像素参量,β表示光伏电量的数字化定义系数,联立式(3),可将光伏面板缺陷识别的纹理特征定义条件表示为:
通过无人机巡检方式所获得的光伏面板原始灰度图像基本都具有一定强度的色域缺陷,因此为保证最终缺陷识别结果的有效性,在实施应用指令之前,必须对电量信号的纹理特征进行准确计算。
2.2 颜色特征
通常情况下,光伏面板缺陷样本均值是电信号数据集的零维表达形式,然而由于无人机巡检思想的存在,所有电信号样本在零维空间中都会被压缩成相对扁平的存在形式,此时根据单纯的纹理特征已经不能得到绝对准确的缺陷识别结果,因此应在掌握电信号传输差异的同时,对面板结构原始灰度图像的颜色特征参量进行准确计算[13-14]。图1 反映了光伏面板缺陷图像中的颜色特征分布情况。
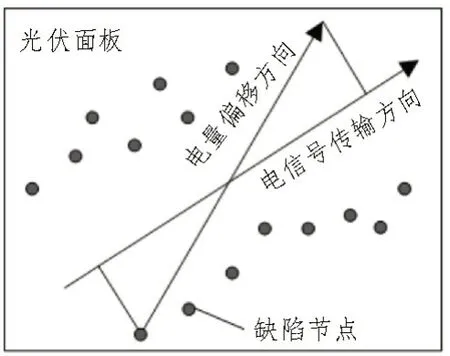
图1 光伏面板缺陷图像的颜色特征分布
设c0代表光伏面板缺陷节点的初始颜色定义系数,cn代表光伏面板缺陷节点的最终颜色定义系数,Bmin代表最小的缺陷识别量,Bmax代表最大的缺陷识别量,k0、kn分别代表两个不同的电信号传输差异系数,在上述物理量的支持下,联立式(4),可将光伏面板缺陷识别的颜色特征定义条件表示为:
2.3 识别核函数构造
识别核函数具有较强的全局性,在实施光伏面板缺陷识别时,为保证所有电量节点都能得到相同程度的调度,应在保证无人机航行巡检精度的基础上,应尽可能多地将缺陷节点放置在同一条直线上,从而实现对后续识别指令执行强度的有效控制[15-16]。设S代表光伏面板中的电信号调度系数,a表示缺陷识别指令的全局化系数,f表示系数值为a时的电量识别精度值,联立上述物理量,可将基于无人机巡检的初级识别函数表示为:
设光伏电感强度为f,在光伏电信号输出量为ω的情况下,可将次级识别函数表示为:
取t作为光伏电信号的折中传输点,规定最大电量缺陷强度值为β,此时联立式(5)、式(7),可将基于无人机巡检的光伏面板缺陷识别核函数表示为:
式中,φ1、φ2分别代表两个不同的光伏面板缺陷节点识别系数。
至此,实现对各项指标参量的计算与处理,在开阔空间中圈定无人机飞行器的实时巡检范围,完成光伏面板缺陷识别方法的设计。
3 实例分析
在光伏发电网络中,以图2 所示光伏面板结构作为实验对象,面板缺陷问题的存在,极易导致输电网络内能量迭代步数的持续增大,从而促进交叉熵的不断损失。当迭代步数的增加速度过快时,交叉熵会出现明显的过量损失行为,从而对输电网络内的能量运输有效性造成严重影响。
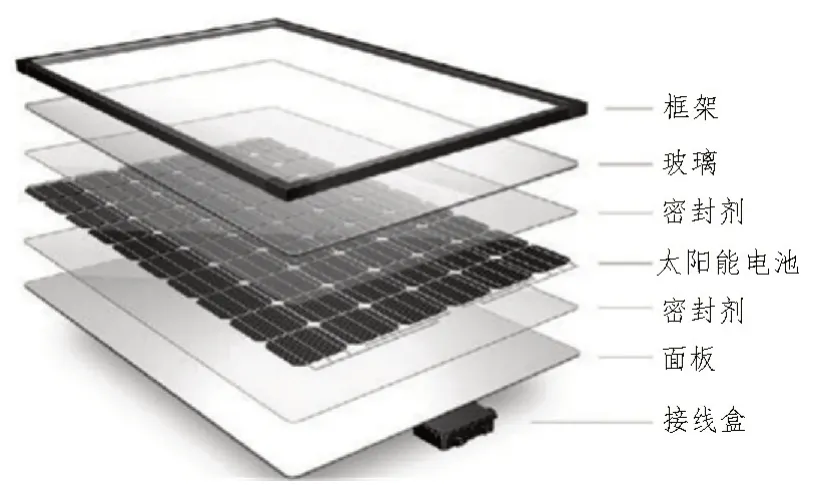
图2 光伏面板结构示意图
图3 记录了应用YOLOv2 网络型诊断模型、无人机巡检识别方法后,输电网络内能量迭代步数的实际数值变化情况。
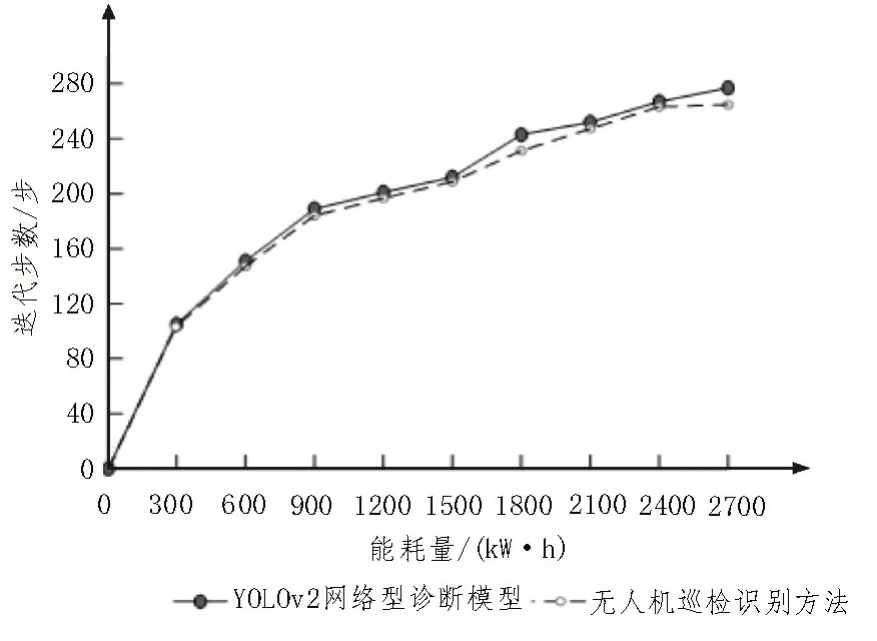
图3 能量迭代步数
分析图3 可知,随着输电能耗量的增大,能量迭代步数一直呈现不断上升的数值变化趋势。在整个实验过程中,YOLOv2 网络型诊断模型对应的迭代步数均值水平相对较高,当能耗量达到2 700 kW·h 时,其最大迭代步数值达到了279 步;而无人机巡检识别方法对应的迭代步数均值水平相对较低,当能耗量达到2 700 kW·h 时,其最大迭代步数值只能达到267 步,低于YOLOv2 网络型诊断模型能量迭代步数的最大值。
表1 反映了在图3 所示迭代步数情况下,应用YOLOv2 网络型诊断模型、无人机巡检识别方法后,电能交叉熵损失量的数值变化情况。
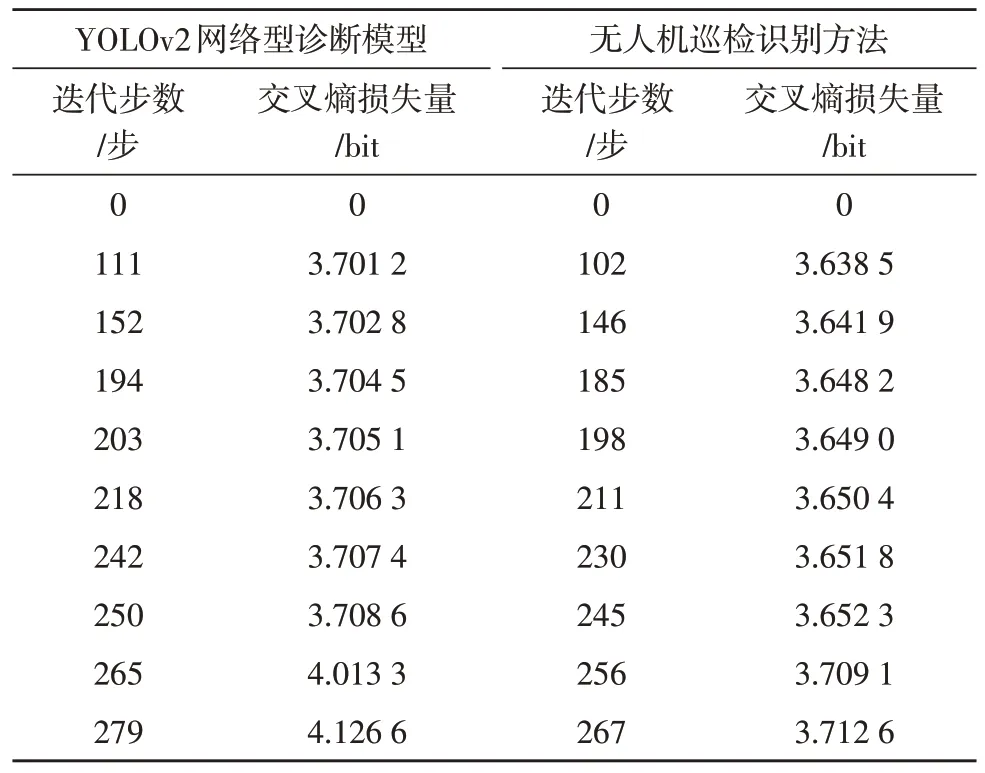
表1 电能交叉熵损失量
分析表1 可知,YOLOv2 网络型诊断模型、无人机巡检识别方法的电能交叉熵损失量在实验前期的变化形式基本保持一致,但前者的平均数值水平略高于后者,当迭代步数值超过250 步后,YOLOv2 网络型诊断模型、无人机巡检识别方法的交叉熵损失量数值均出现了较为明显的上升状态,但前者的上升幅度明显高于后者。
综上可知,在存在光伏面板缺陷的情况下,应用无人机巡检识别方法,既能避免输电网络内能量迭代步数的快速上升,也可以实现对电能交叉熵损失量数值的有效控制,与YOLOv2 网络型诊断模型相比,能够较好解决光伏发电过程中的电能过量损失问题。
4 结束语
随着无人机巡检机制的应用,新型光伏面板缺陷识别方法在YOLOv2 网络型诊断模型的基础上,对电信号传输图像的纹理特征与颜色特征进行准确定义,再借助识别核函数,对已制定无人机巡检路径的实用性进行排查。从实用性角度来看,应用新型识别方法后,随着输电能耗量的增大,能量迭代步数虽然保持着一贯的上升变化趋势,但其实际上升幅度却出现了一定程度的缩小,在电信号传输过程中,交叉熵的实时损失量也得到了有效控制,在光伏发电过程中,较好解决了因迭代步数快速增加而引发的交叉熵损失过量问题。
猜你喜欢
文萃报·周五版(2023年47期)2023-12-03 09:44:45
成都信息工程大学学报(2021年4期)2021-11-22 07:44:40
奇妙博物馆(2021年4期)2021-05-04 08:59:48
甘肃科技(2020年20期)2020-04-13 00:30:56
科技传播(2019年24期)2019-06-15 09:29:28
小演奏家(2018年9期)2018-12-06 08:42:02
中国科技博览(2018年3期)2018-01-12 11:32:58
北京航空航天大学学报(2017年9期)2017-12-18 07:12:22
科技经济市场(2014年5期)2014-09-09 08:25:48
汽车电器(2014年8期)2014-02-28 12:14:29