仿生扑翼飞行器研究现状与发展前景分析
2023-03-19 11:59赵英杰
农机使用与维修 2023年3期
赵英杰
(衢州职业技术学院,浙江 衢州 324000)
0 引言
在自然环境中有许多种类的鸟和昆虫,它们飞行的方式是使用翅膀来进行飞行,这种飞行方式能适应复杂的低空环境。这一特殊性是固定翼飞行器所无法达到的,尤其是其所具备的灵活性和能量应用高效性[1]。
从20世纪80年代开始,随着实验仪器设备技术的发展及计算流体力学的进步,科研人员开始从流体的非定常流动方向研究仿生扑翼空气动力学并且取得长足的进步[2-3]。本文首先介绍国内外研究现状及制作样机的方法与结构分类,讨论说明了扑翼机构的分类,最后介绍仿生扑翼飞行器在当前面临的问题以及发展方向,并进行总结与展望。
1 仿生扑翼飞行器的运行原理
1.1 自然界中扑翼运动的类型
鸟类广泛分布,由于体型不同,飞行环境的飞行模式和气流条件也不同。为方便区别,飞行模式可以根据其扑动频率和扑动高度进行划分[4-5]。
1.1.1 低频颤振,主要是滑翔飞行
因为飞行需要足够的力量,较大的鸟类拥有更宽的翅膀,这使其拥有较大的翼展面积用来提供升力。当改变运动姿态时,只需要短暂的低频振动即可获得巨大的加速度。飞行过程中主要保持滑翔状态,节约能量。这也是目前广泛应用的固定翼飞行器借鉴的方向。
1.1.2 中频扑翼运动,机动性强,速度快
自然界大多数中小型鸟类都使用这种飞行方式。由于体积小,单靠滑动无法实现升力,也无法完全摆脱空气的黏性。所以实现升力的主要方法是拍打翅膀。
同时,中频扑翼飞行模式和小尺寸翅膀也提供了很高的飞行机动性。有些鸟用“跳跃”来飞行,即襟翼循环完成后,机翼弯曲,利用惯性飞行,提高了飞行效率和飞行速度。由于它们的翼展很小,因此不能长距离飞行。
1.1.3 高频颤振、翼型小、无法滑翔、飞行位置多样
自然界中只有少数小鸟使用高频拍打,其中最具代表性的就是蜂鸟。蜂鸟能够进行复杂的飞行动作,例如通过翅膀的高频拍动和灵活变化在空中翻转和悬停,这是其他大型鸟类无法做到的。
1.2 扑翼飞行器结构设计
研究扑翼飞行器至今,随着电机、流体力学和自动控制技术的进步,扑翼飞行器在机体轻量化、运动效率、柔性翼强度等方面取得了很大的进展,但始终无法投入实际使用[6-7]。扑翼飞行器面临的问题可归纳为以下两点:一是整机设计仿生化程度低,不能很好地模拟扑翼复杂飞行;二是飞行器能量转换效率低[8]。
目前,扑翼飞行器主要是采用结构简单、轻量化的单自由度机构驱动,并且配合柔性机翼材料来实现飞行。但是这种方法的缺点是无法适应复杂的气流变化[9-10]。
从国内外小型扑翼飞机的驱动结构来看,大部分扑翼飞机忽略了肩部的转动自由度,采用两侧固定的单自由度或多自由度扑翼机构实现机翼的扑翼运动,从而驱动扑翼飞行器飞行[11-12]。
综上所述,首先,应当根据扑翼飞行器的设计尺寸和任务需求来选择扑翼的运动频率。第二,应当在扑翼飞行器机身轻度达标的基础上尽可能的减少重量。第三,应当使用多自由度的机构或者柔性翼来应对飞行过程中的非定常流动的空气,从而高效率的为扑翼飞行器提供升力。
2 国内外研究现状
自20世纪50年代以来,扑翼飞行器相关的研究已经吸引了大量科研人员的兴趣,当前仿生扑翼机器鸟的研究主要集中在机械结构及仿生原理上[13-14],一部分研究者对鸟类的结构进行了深入探讨并且通过制作样机与实验研究了鸟类在空中飞行时的运动模式并获得相关数据。
2.1 国外
2021年,东京都立大学的Muhammad Labiyb Afakh等[15]研究者开发的仿生扑翼机器人(图1)可以使用简单的拍动机构和轻量化设计,通过超过自身重量来产生推力。起飞实验结果表明,扑翼机器人能够在没有辅助的情况下从地面自行起飞。
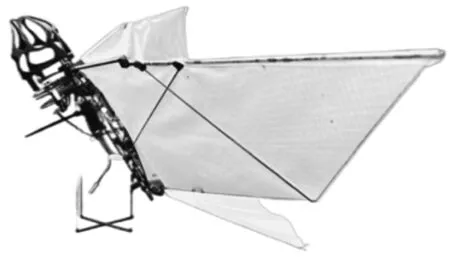
图1 东京都立大学研发的仿生扑翼飞行器
2020年,美国西雅图华盛顿大学的研究人员制作了依赖于压电驱动的扑翼飞行机器人[16](图2)。在样机实验中,运用视觉传感器来修正扑翼飞行器的运动偏差,使得飞行器可以自主飞行。

图2 美国西雅图华盛顿大学研发的仿生扑翼飞行器
2021年,华盛顿大学的研究人员设计了一种质量轻、质心低、方便制作、零件少的扑翼机器人[17](图3),即使在非定常条件的空中飞行,机器人也能够在没有支架的情况下稳定着陆,并允许机器人在水面和陆地运动。调整相对机翼行程幅度可以实现机器人的转向,还具有着陆时在地面上移动的能力使机器人得以通过相当狭窄的空间和障碍物,而且具备悬停飞行和受控着陆的能力。
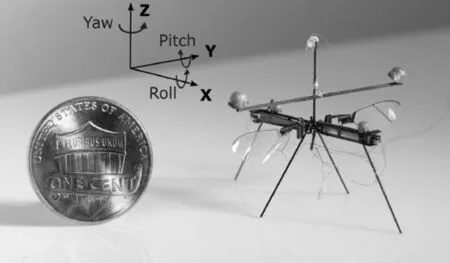
图3 美国西雅图华盛顿大学研发的仿生扑翼飞行器
2.2 国内
2020年,哈尔滨工业大学徐艺星[18]设计并制造了仿生蝙蝠扑翼飞行器样机(图4)。扑翼机构以空间曲柄摇杆机构为基础,采取二级齿轮减速传动,制作样机并进行悬吊飞行实验。

图4 哈尔滨工业大学研发的仿生扑翼飞行器
2020年,南京航空航天大学的顾光健[19]参考自然界中的鸟类设计了仿生扑翼飞行器并制作了样机(图5),还对整机进行气动测试。测试结果表明,扇翼的平均角度只能影响扑翼合力矢量的方向,而扇翼的频率只能影响扑翼合力矢量的大小。

图5 南京航空航天大学研发的仿生扑翼飞行器
2021年,吉林大学的陈默[20]基于仿生原理对自然界中的苍蝇进行模拟,设计了仿生扑翼飞行器并且在此基础上进行了空气动力学与运动学研究分析(图6)。制作了样机并进行了实验。

图6 南京航空航天大学研发的仿生扑翼飞行器
3 结语
尽管目前各国科研人员研发的仿生扑翼飞行器还在结构强度和使用寿命上有所欠缺,在飞行控制和能量利用效率上还需发展,从而导致扑翼飞行器未能大规模应用。但是随着空气动力学、材料学、自动控制技术的进步,未来的扑翼飞行器将会有更长的续航时间和使用寿命,并将在军事和民用领域得到大规模的应用,带来巨大的经济和社会效益。
猜你喜欢
中国机械工程(2022年21期)2022-11-21
中国特种设备安全(2022年4期)2022-07-08
中国机械工程(2022年7期)2022-04-20
中国机械工程(2021年23期)2021-12-15
数据采集与处理(2021年4期)2021-09-20
装备制造技术(2020年4期)2020-12-25
大学图书馆学报(2020年4期)2020-08-13
中国临床医学(2019年3期)2019-08-23
时代农机(2016年6期)2016-12-01
世界教育信息(2016年22期)2016-09-10