基于扭矩传感器杀秧机伤薯、空转报警装置研制与试验
2023-03-19 11:59刘崇林赵胜雪金丽宇潘思奇张明秋
农机使用与维修 2023年3期
刘崇林,赵胜雪,金丽宇,潘思奇,张明秋
(1.黑龙江工业学院 现代制造工程学院,黑龙江 鸡西 158100;2.黑龙江省马铃薯机械化工程技术研究中心,黑龙江 大庆 163319)
0 引言
马铃薯除了有“土豆”的称呼外,还有洋芋、地蛋、薯仔、甘薯、番仔薯等别名。马铃薯属茄科草本植物,种植遍布世界各地,是人类第四大食物来源。2015年,中国将马铃薯纳入了战略主粮。马铃薯可加工成馒头、面条、米粉等主食,马铃薯块茎中含有大量的膳食纤维、胡萝卜素和抗坏血酸,这是禾谷类粮食中所没有的[1-3]。
块茎类农作物一般在收获前需进行杀秧处理。对于马铃薯而言,杀秧主要是指马铃薯收获前进行的茎秆粉碎还田作业环节,保证马铃薯机械化收获作业的顺利实现,提高收净率和作业效率,保证垄沟垄台的薯秧清理干净[4]。
杀秧机作业前,应先将杀秧机提升至锤爪离地面20~25 cm高度,接合动力输出轴运转1~2 min,再挂挡作业。作业时禁止锤爪打土,若发现锤爪打土时,应调整地轮离地高度或拖拉机上悬挂拉杆长度,杀秧作业时,刀辊高速旋转将地面浮土打起,影响驾驶员视线,如图1所示,无法靠视觉判断是否伤薯、空转。往往会造成伤薯、未打秧情况连片出现,造成巨大的经济损失[5-7]。

图1 杀秧作业尘土飞扬
1 装置组成及工作原理
设计了具有动态扭矩传感器实时报警装置,该装置具有实时性、安装简单、价格便宜等特点。报警装置将单片机与动态扭矩传感器结合,以STC89C52型单片机为微控制器,利用动态扭矩传感器对杀秧机刀辊作业时的扭矩进行实时监测,通过二线串行接口将扭矩信号送至STC89C52微控制器,最后利用STC89C52微控制器完成对扭矩值的区分,扭矩值大于刀辊正常作业时的扭矩值时,连接单片机的蜂鸣器响起,实现检测到杀秧机伤薯时的报警[4][8]。报警装置主要由动态扭矩传感器、STC89C52单片机和蜂鸣器组成。
1.1 刀辊扭矩值的采集原理分析
扭矩传感器采用LH-NJ-02动态扭矩传感器测量刀辊的扭矩值,控制器硬件主要以STC89C52单片机为核心控制芯片,在芯片中进行扩展。扭矩测量原理为,被测动力电机与反作用力负载电机通过弹性联轴器同轴相连,并分别在两个电机的转子上安装旋转变压器。系统安装完成后,由于两个电机转子的位置通常不是相同的,因此需要将两个旋转变压器检测到的两个电机转子的角度差置为零,此时扭转弹簧的形变量为零。测量动态扭矩时,反作用力负载电机处于卡死状态,运行被测动力电机,系统最终处于一个平衡状态,此时弹性联轴器因形变产生扭转角,通过两个旋转变压器检测出弹性联轴器的扭转角,即可测出被测动力电机的动态扭矩值M[10]。
1.2 接口电路设计
工作过程中,单片机与传感器的连接较短,二者之间的连接需要增加一个5K上拉电阻,可以将不确定的信号通过电阻嵌位在高电平,电阻同时还可以起到限流作用,避免电流过大将器件烧坏。传感器的合理电压范围为3~5.5 V,过高过低都会损坏传感器,在接通电源后,需过一段时间才能发送指令,从而有效越过刚接通时的不稳定状态。为了抑制和防止电源中的干扰,可在电源端加一个小电容,起到滤波的作用。典型的应用电路如图2所示。
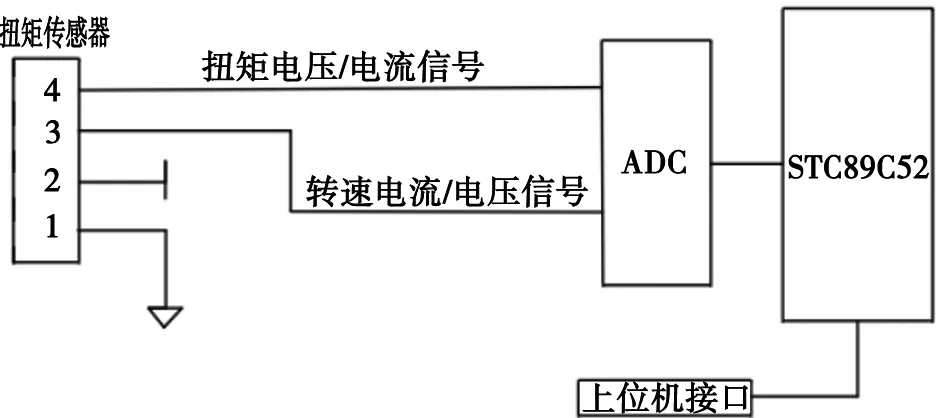
图2 LH-NJ-02典型电路连接图
2 系统软件的设计与实施
2.1 扭矩值读取
单片机和动态扭矩传感器通信采用串行二线接口SCK和LH-NJ-02二线串行通信协议与I2C协议不兼容。由于采用二线串行接口,LH-NJ-02的操作按照严格时序,有4条用户命令,分别是测量扭矩命令03H、读寄存器状态命令07H、写寄存器状态命令06H和软启动命令1EH。单片机发出启动命令,随后发出一个后续8位命令码,该命令码包含3个地址位(芯片设定地址为000)和4个命令位,发送完该命令码,将DATA总线设为输入状态等待SHT11的响应,SHT11接收到上述地址和命令码后,在第8个时钟下降沿,将DATA下拉为低电平作为芯片的ACK;在第9个时钟下降沿之后,释放DATA(恢复高电平)总线;释放总线后,开始测量当前湿度,测量结束后,再次将DATA总线拉为低电平;单片机检测到DATA总线被拉低后,确认湿度测量已经结束,发出SCK时钟信号;芯片在第8个时钟下降沿,输出高字节数据;在第9个时钟下降沿,单片机将DATA总线拉低作为ACK信号,然后释放总线DATA,在随后8个SCK周期下降沿,芯片发出低字节数据;接下来的SCK下降沿,单片机再次将DATA总线拉低作为接收数据的ACK信号;最后8个SCK下降沿芯片发出CRC校验数据,单片机不予应答(NACK)则表示测量结束。CRC寄存器通过计算一个多项式(x8+x5+x4)之和来判定测量过程是否发生错误,一旦发现错误,单片机则发送软启动命令,重新进行测量。如果不使用CRC校验,单片机可以在测量值LSB后保持应答信号ACK高电平,终止通信。LH-NJ-02在测量和通信完成后会自动返回睡眠模式[10-11]。
2.2 扭矩值输出
单片机和扭矩传感器通信采用串行二线接口SCK和DATA,其中SCK为时钟线,DATA为数据线,硬件接口电路比较简单。需要注意的是,DATA数据线需要外接上拉电阻,时钟线SCK用于微处理器和LH-NJ-02之间通信同步,由于接口包含了完全静态逻辑,所以对SCK最低频率没有要求,工作电压高于4.5 V时,SCK频率最高为10 MHz,而工作电压低于4.5 V时,SCK最高频率为1 MHz。由于所用单片机不具备I2C总线接口,使用单片机通用I/O口线来虚拟I2C总线,并利用RA0口来虚拟数据线DATA,RA1口线来虚拟时钟线,在DATA端接入一只10 kΩ的上拉电阻时,在VDD及GND端接入一只0.1 μF的去耦电容[12-14]。控制系统构成如图3所示。
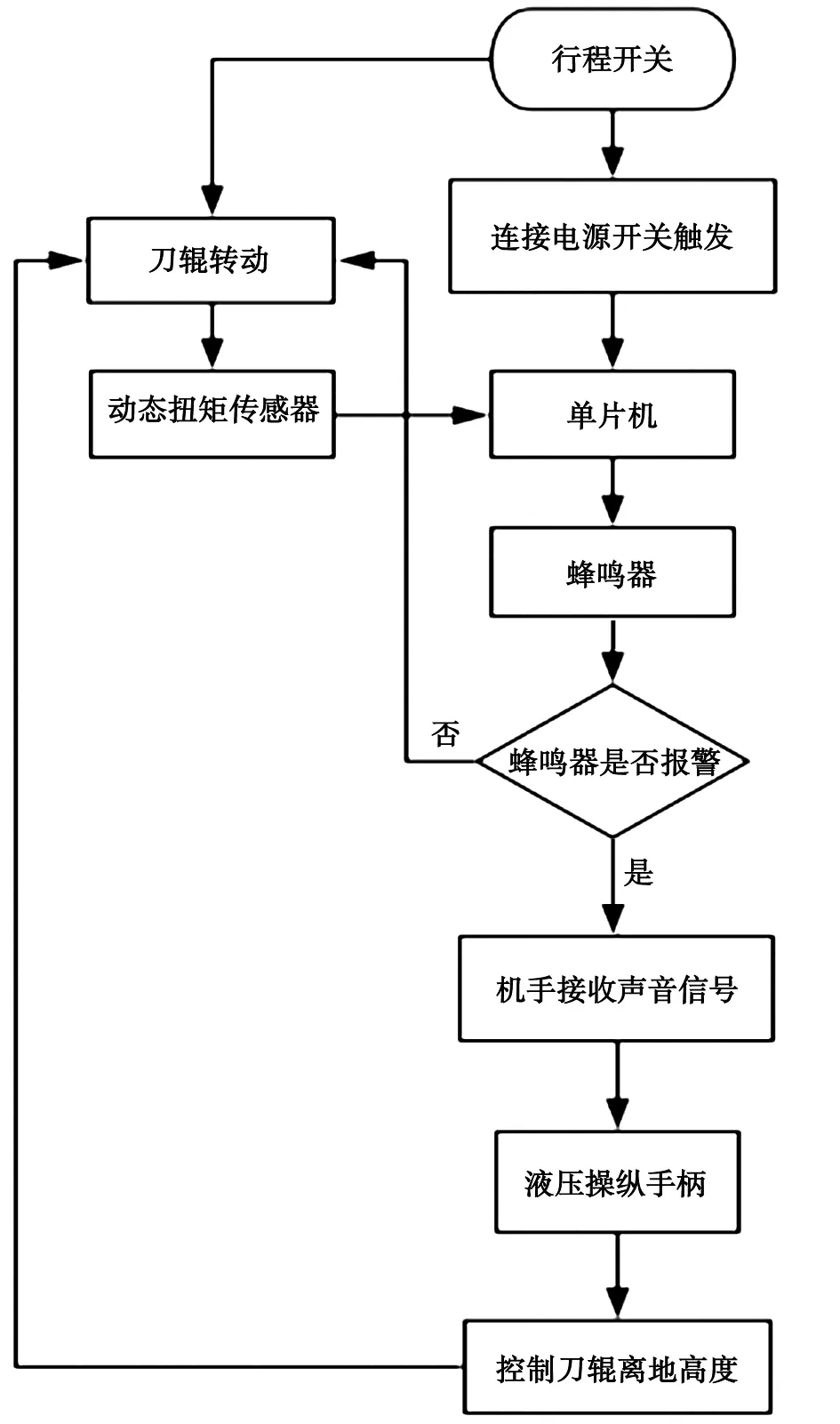
图3 控制系统构成图
3 扭矩值计算与试验验证
为检验该装置的测量准确性和测量稳定性,对其进行试验,由于该装置处于刚完成阶段,可能会存在一些不可控因素导致数据不准的情况,因此采用计算机模拟试验的方式,将模拟结果与实际试验结果相对比,利用数学统计的方法评判其测量稳定性。此次试验验证主要包含两部分,分别为试验设计、实际值与预测值的误差分析。试验设计方案选用双因素试验设计,利用扭矩传感器打秧机伤薯报警装置进行实际值与预测值的误差分析,验证设计的扭矩传感器打秧机伤薯报警装置的可行性及准确性[15]。
3.1 理论分析
在试验初期参考东北农业大学吕金庆的《马铃薯杀秧机设计与试验》中的杀秧机,最佳作业参数选取为:刀辊转速1 600 r·min-1、杀秧机的前进速度5 km·h-1、垄上刀距垄台高度为50 mm[3],并依据NY/T 2706—2015马铃薯打秧机质量评价技术规范,得出刀距垄高度合理为45~65 mm,刀辊转速为1 500~1 600 r·min-1,通过式(1)计算功效
(1)
式中P—功率,kW;
T—扭矩,N·m;
n—转速,r·min-1。
得出使用约翰迪尔1204,功率为88.26 kW的扭矩传感器的两个临界值分别为585.46 N·m、526.80 N·m。
1)当扭矩值高于585.46 N·m时,杀秧机离地高度过低出现伤薯情况。
2)当扭矩值低于526.80 N·m时,杀秧机离地高度过高则出现空转不作业情况。
3.2 扭矩值验证
为了验证理论得出的两个扭矩极值的准确性,于2021年7月15—22日在黑龙江省农垦九三管理局尖山农场进行了1204拖拉机牵引马铃薯杀秧机作业时扭矩值的测量、记录。本次扭矩值的测量记录,使用黑龙江八一农垦大学研发的田间机械动力学参数遥测仪(图4)进行试验,传感器安装位置如图5所示。

图4 机械动力学参数遥测仪

图5 传感器安装位置
经过测量1204拖拉机牵引由河北布谷机械制造厂生产的马铃薯杀秧机,测得马铃薯杀秧机在相同前进速度、不同离地高度时的扭矩值,结果如表1所示。
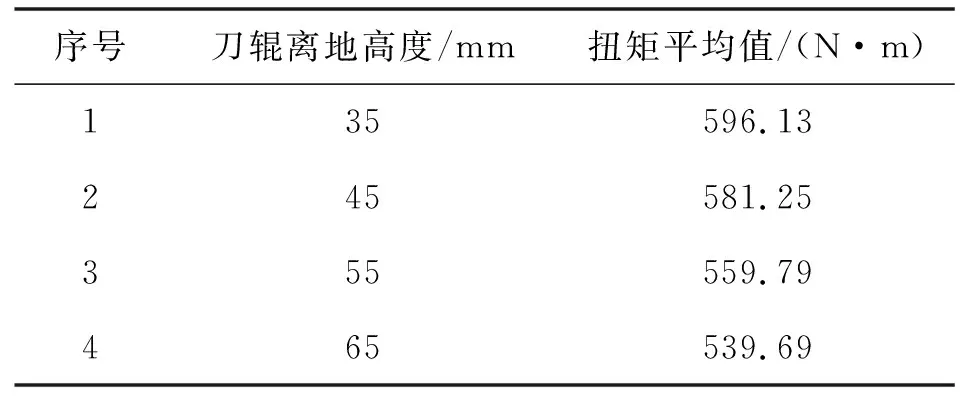
表1 实际测量不同刀辊高度的扭矩值
通过试验验证发现在生产作业中的扭矩值大于理论计算的扭矩值,通过对比,实际值比理论值高11 N·m左右。为此在单片机中输入极值,当扭矩值高于596.46 N·m时,杀秧机离地高度过低出现伤薯情况;当扭矩值低于537.80 N·m时,杀秧机离地高度过高出现空转不作业情况。
3.3 田间试验验证
2021年8月22—24日在黑龙江省农垦九三管理局尖山农场进行了杀秧机田间杀秧作业伤薯报警试验。试验地为垄播水浇地和垄播旱地2种类型。每个试验田长15 m,其中缓冲区3 m,试验区均分为4部分。马铃薯品种为青薯9号,马铃薯杀秧机动力由拖拉机动力输出轴提供,试验拖拉机型号为约翰迪尔1204,田间机械动力学参数遥测仪、电子游标卡尺、卷尺等[16]。

图6 田间试验验证
通过分析,本试验先将杀秧机输出轴运转1~2 min,再挂挡作业,使杀秧机刀辊的转速保持稳定,选取机车前进速度、杀秧高度2个因素(表2),每个因素选取3个水平进行双因素试验,以马铃薯杀秧伤薯报警准确率作为评价指标表。
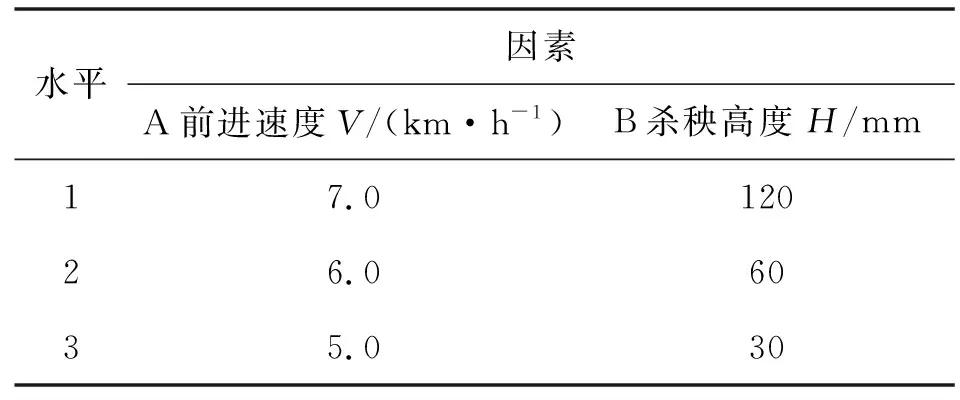
表2 试验因素与水平
杀秧伤薯报警准确度T1,测量选取长12 m的地块,将每个地块均分为4小段,测量结果分为报警准确、报警不准确、未报警准确和未报警不准确4种(表3),杀秧机报警准确率为
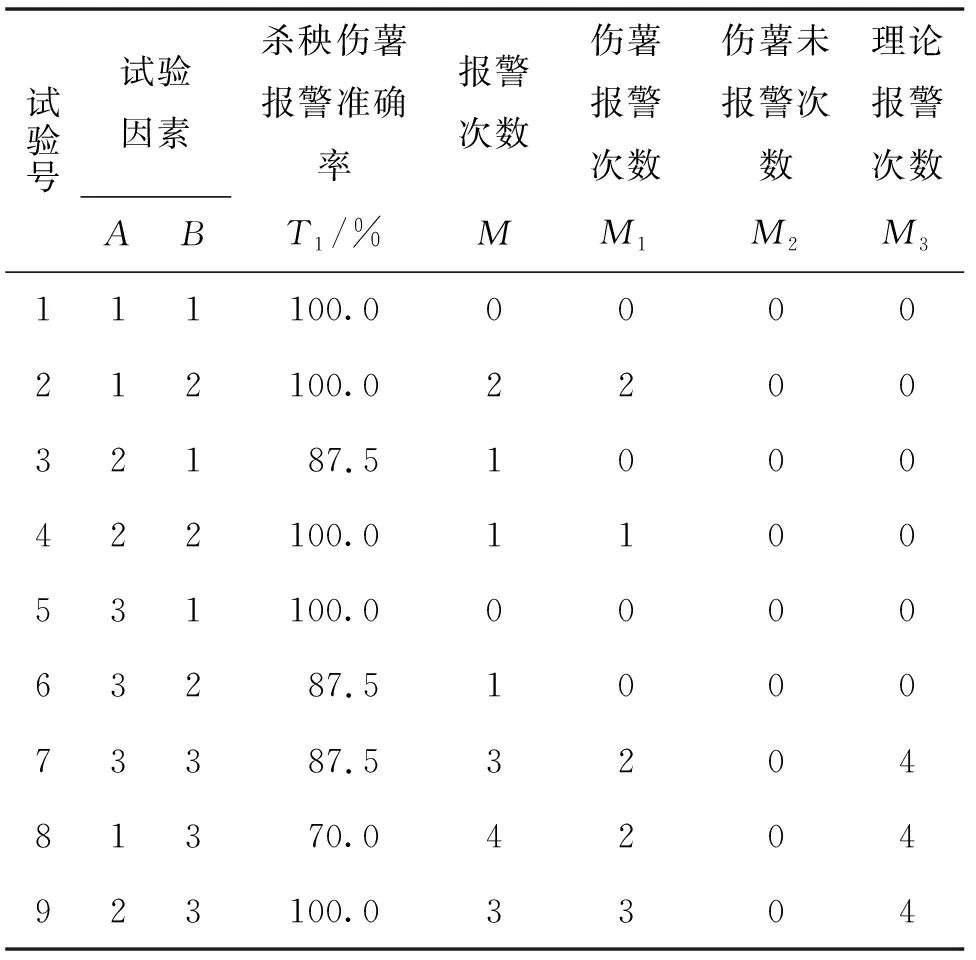
表3 伤薯试验方案与结果
(2)
式中T1—杀秧机伤薯报警准确率,%;
M—伤薯报警次数,次;
M1—伤薯准确报警次数,次;
M2—伤薯未报警伤薯次数,次。
杀秧机空转报警准确度T2,测量选取长为12 m的地块,将每个地块均分为4小段,测量结果分为报警准确、报警不准确、未报警准确和未报警不准确4种(表4),杀秧机报警准确率为

表4 空转试验方案与结果
(3)
式中T2—杀秧机空转报警准确率,%;
L—空转报警次数,次;
L1—空转准确报警次数,次;
L2—空转未报警伤薯次数,次。
试验表明当拖拉机输出转速稳定时,正常杀秧作业时报警准确率在95%以上,杀秧高度过低时或过高时准确率略低。
4 结论
本设计的扭矩传感器打秧机伤薯报警装置,是基于扭矩传感器及单片机基础上研制的,主要优势在于能对杀秧工作时出现的伤薯、空转情况及时报警、及时处理,减少种植户经济损失,为马铃薯杀秧机研制提供参考。从实际试验结果可见,该报警装置稳定性较好,达到了设计要求。
猜你喜欢
少儿科学周刊·儿童版(2021年21期)2021-12-11
中国煤层气(2021年5期)2021-03-02
铁道通信信号(2018年5期)2018-06-28
凿岩机械气动工具(2017年3期)2017-11-22
陕西画报(2016年1期)2016-12-01
汽车维护与修理(2016年10期)2016-07-10
电子产品可靠性与环境试验(2016年6期)2016-05-17
创新作文(小学版)(2016年31期)2016-03-11
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
小学生·多元智能大王(2015年3期)2015-05-25